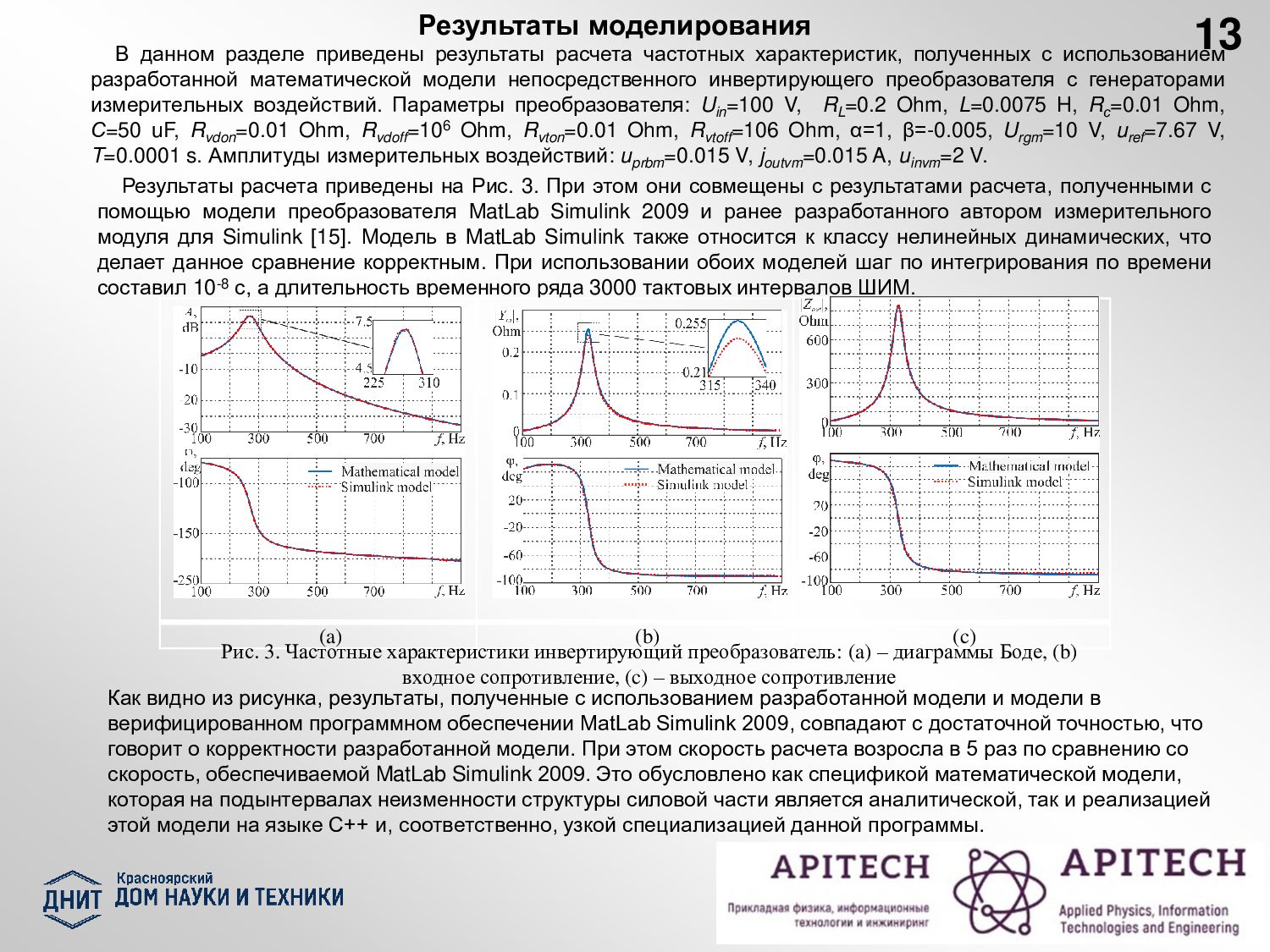
характеристик, полученных с использованием разработанной математической модели непосредственного инвертирующего преобразователя с генераторами измерительных воздействий. Параметры преобразователя: Uin =100 V, RL =0.2 Ohm, L=0.0075 H, Rс =0.01 Ohm, С=50 uF, Rvdon =0.01 Ohm, Rvdoff =106 Ohm, Rvton =0.01 Ohm, Rvtoff =106 Ohm, α=1, β=-0.005, Urgm =10 V, uref =7.67 V, T=0.0001 s. Амплитуды измерительных воздействий: uprbm =0.015 V, joutvm =0.015 A, uinvm =2 V. Результаты расчета приведены на Рис. 3. При этом они совмещены с результатами расчета, полученными с помощью модели преобразователя MatLab Simulink 2009 и ранее разработанного автором измерительного модуля для Simulink [15]. Модель в MatLab Simulink также относится к классу нелинейных динамических, что делает данное сравнение корректным. При использовании обоих моделей шаг по интегрирования по времени составил 10-8 с, а длительность временного ряда 3000 тактовых интервалов ШИМ. (a) (b) (c) Рис. 3. Частотные характеристики инвертирующий преобразователь: (a) – диаграммы Боде, (b) входное сопротивление, (c) – выходное сопротивление Как видно из рисунка, результаты, полученные с использованием разработанной модели и модели в верифицированном программном обеспечении MatLab Simulink 2009, совпадают с достаточной точностью, что говорит о корректности разработанной модели. При этом скорость расчета возросла в 5 раз по сравнению со скорость, обеспечиваемой MatLab Simulink 2009. Это обусловлено как спецификой математической модели, которая на подынтервалах неизменности структуры силовой части является аналитической, так и реализацией этой модели на языке С++ и, соответственно, узкой специализацией данной программы.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Контакты Кобылкин Александр Сергеевич E-mail: [email protected] 08 V МЕЖДУНАРОДНАЯ КОНФЕРЕНЦИЯ](https://files.speakerdeck.com/presentations/48134cd75e674ce59452214e9e4bbc2d/slide_29.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Контакты Владимир Маликов Алтайский государственный университет, Барнаул, Россия E-mail: [email protected]](https://files.speakerdeck.com/presentations/48134cd75e674ce59452214e9e4bbc2d/slide_34.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Contacts Vladimir Malikov Altai State University, Barnaul, Russia E-mail: [email protected]](https://files.speakerdeck.com/presentations/48134cd75e674ce59452214e9e4bbc2d/slide_39.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}