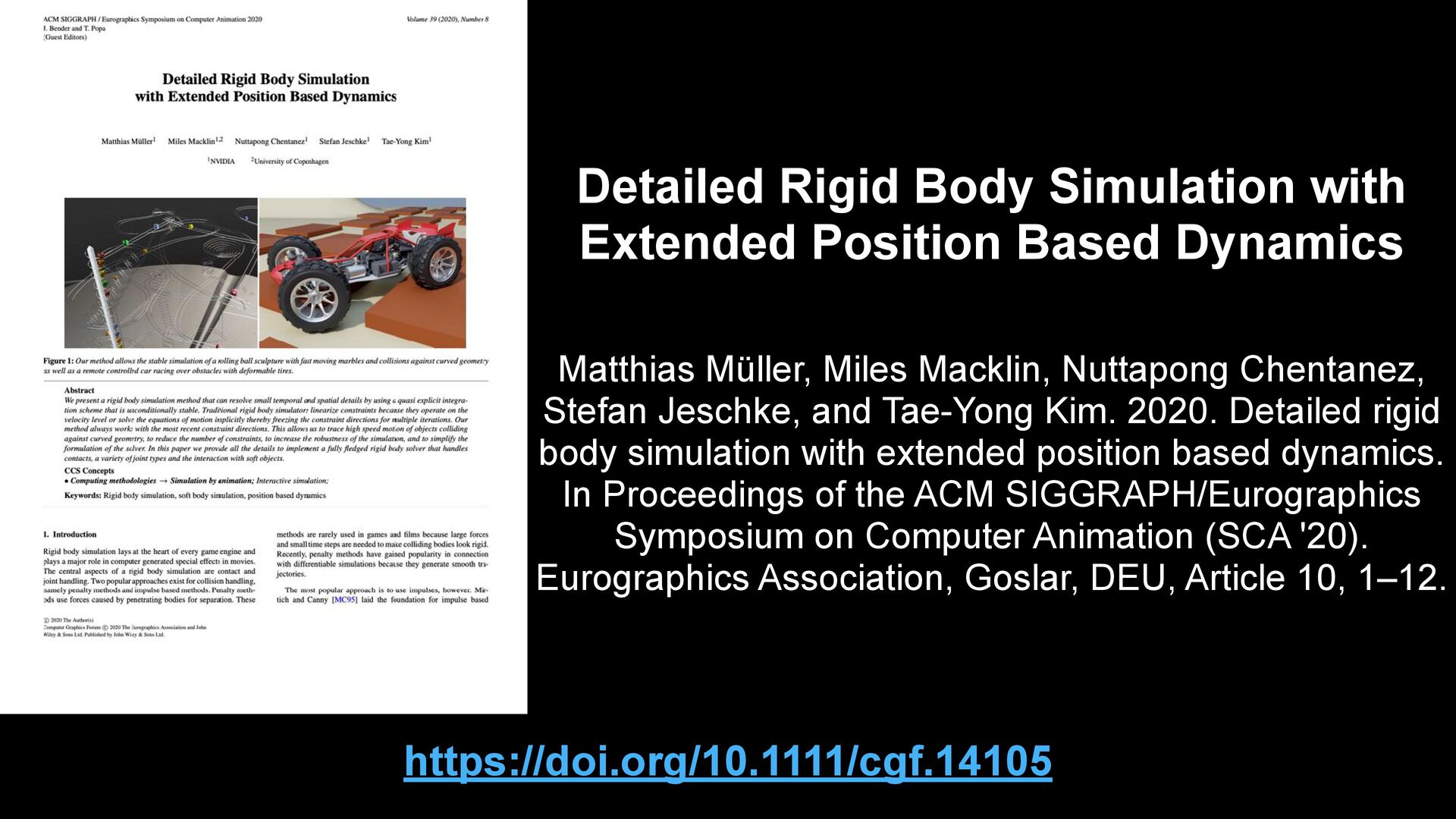
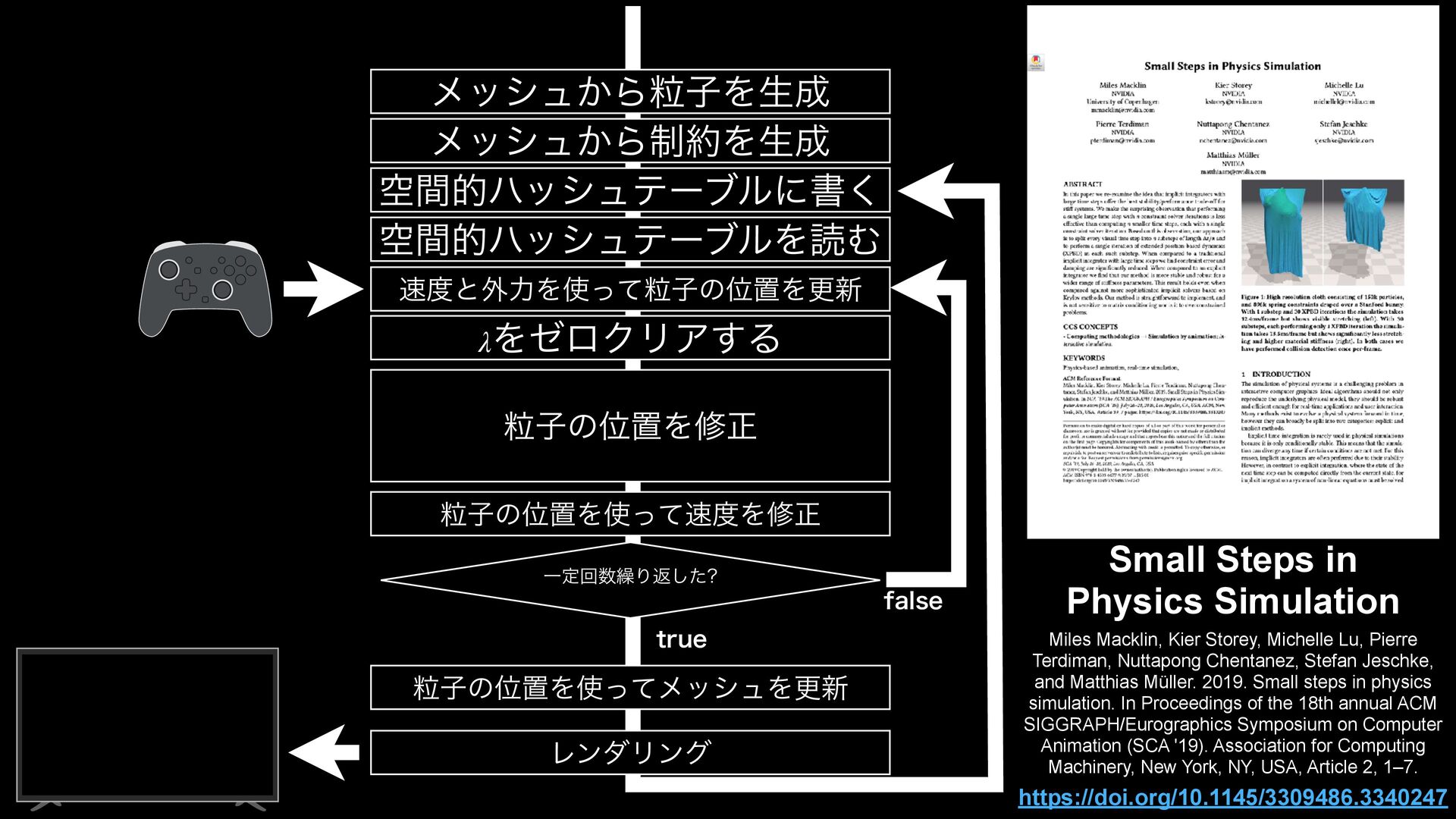
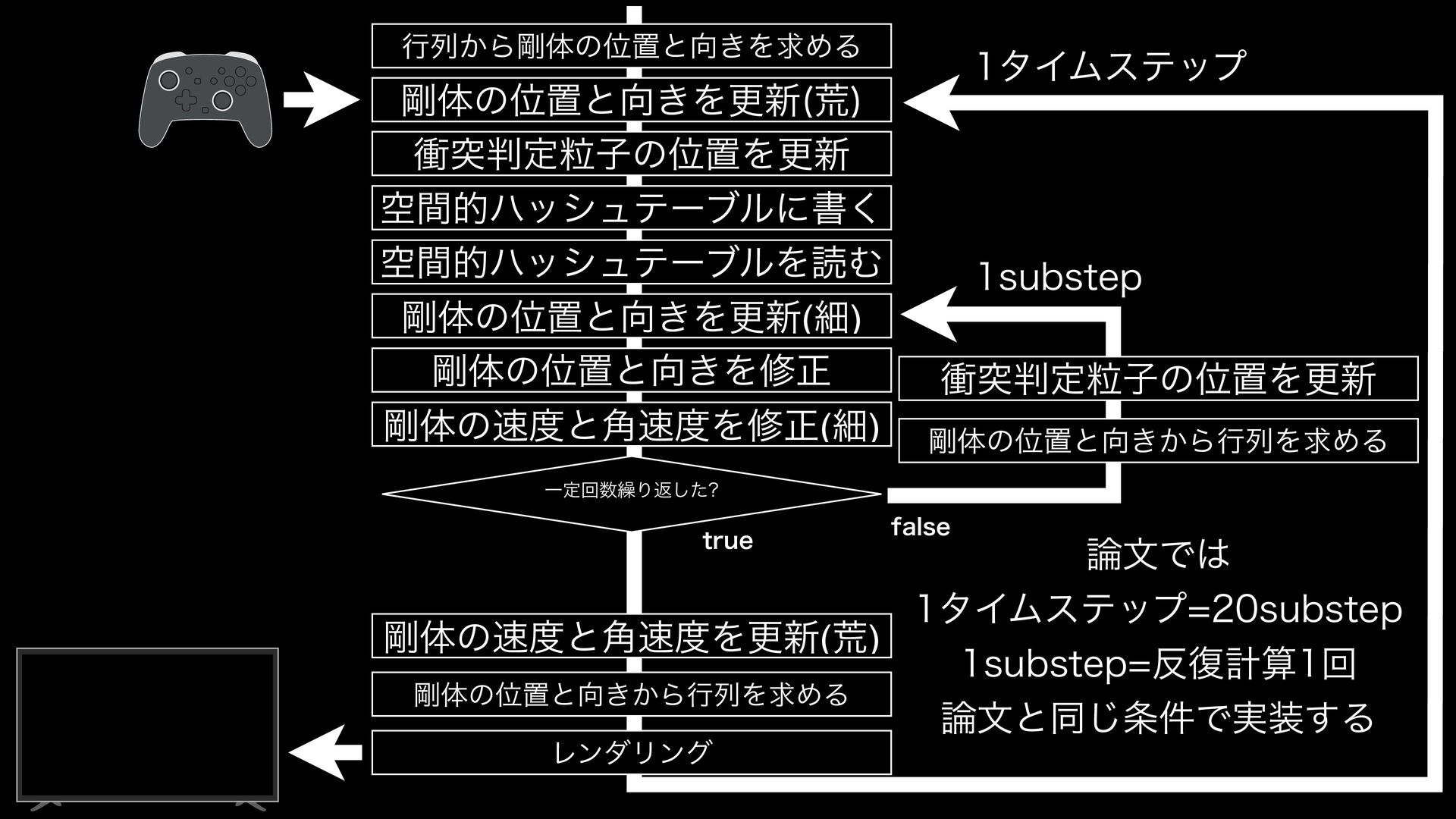
ビデオゲームで用いられる物理シミュレーションの手法 Position Based Dynamicsを剛体を扱えるように拡張したDetailed Rigid Body Simulation
with Extended Position Based Dynamicsを解説します
これは2025年12月6日に行われた Kernel/VM探検隊@北陸 Part 8 での発表動画です
発表動画 : https://www.youtube.com/watch?v=3fUvEXuhRnc
ソースコード : https://github.com/Fadis/gct/
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
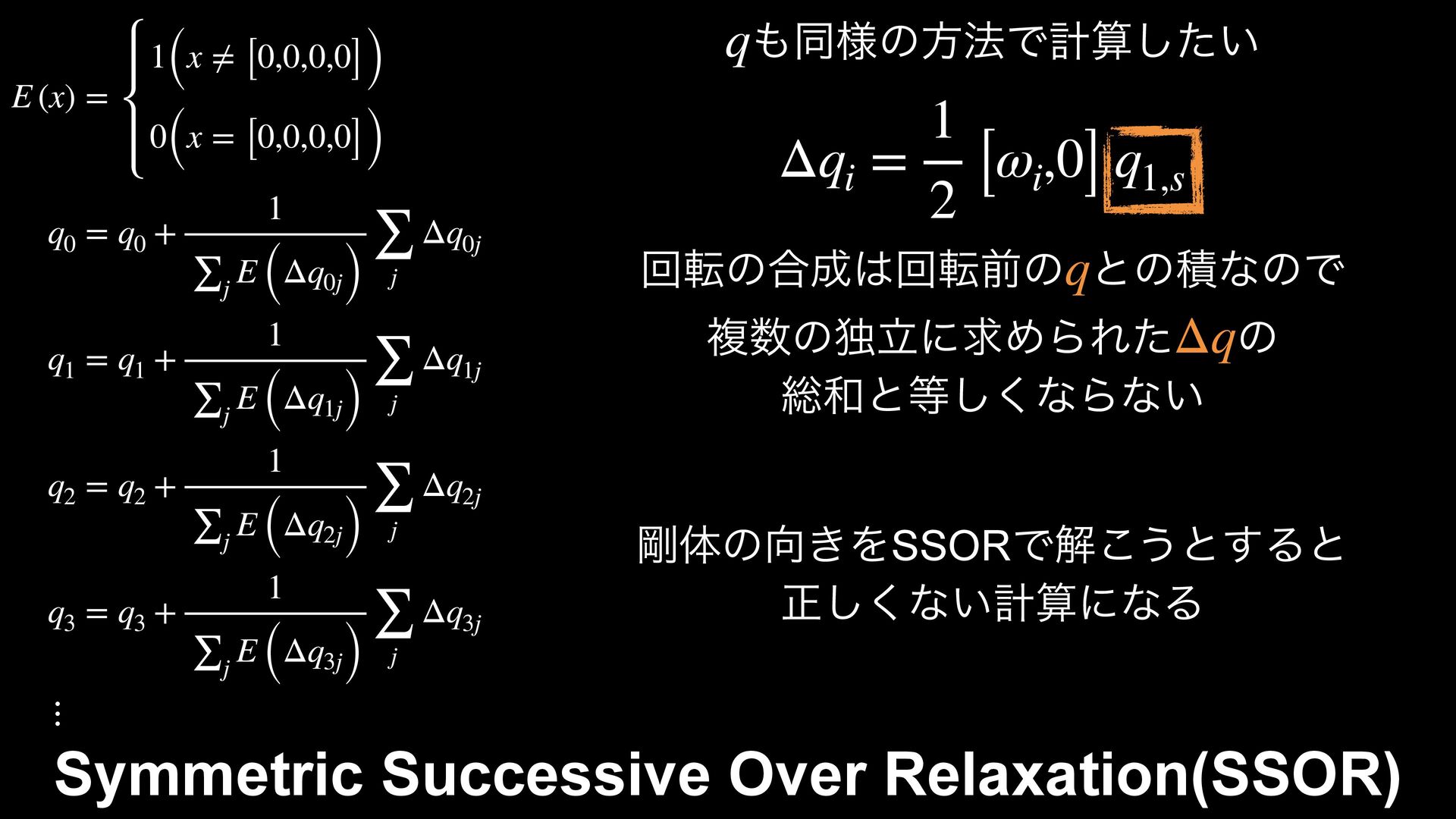
![E (x) = 1(x ≠ [0,0,0]) 0(x = [0,0,0]) p0](https://files.speakerdeck.com/presentations/8d2f8f6111834fb9a4db56f43193683a/slide_51.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
![Symmetric Successive Over Relaxation(SSOR) E (x) = 1(x ≠ [0,0,0,0])](https://files.speakerdeck.com/presentations/8d2f8f6111834fb9a4db56f43193683a/slide_55.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![const uint rigid0 = particle_pool[ dc.x ].rigid; const vec3 p0](https://files.speakerdeck.com/presentations/8d2f8f6111834fb9a4db56f43193683a/slide_63.jpg){kind=link}
![const uint rigid0 = particle_pool[ dc.x ].rigid; const vec3 p0](https://files.speakerdeck.com/presentations/8d2f8f6111834fb9a4db56f43193683a/slide_64.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
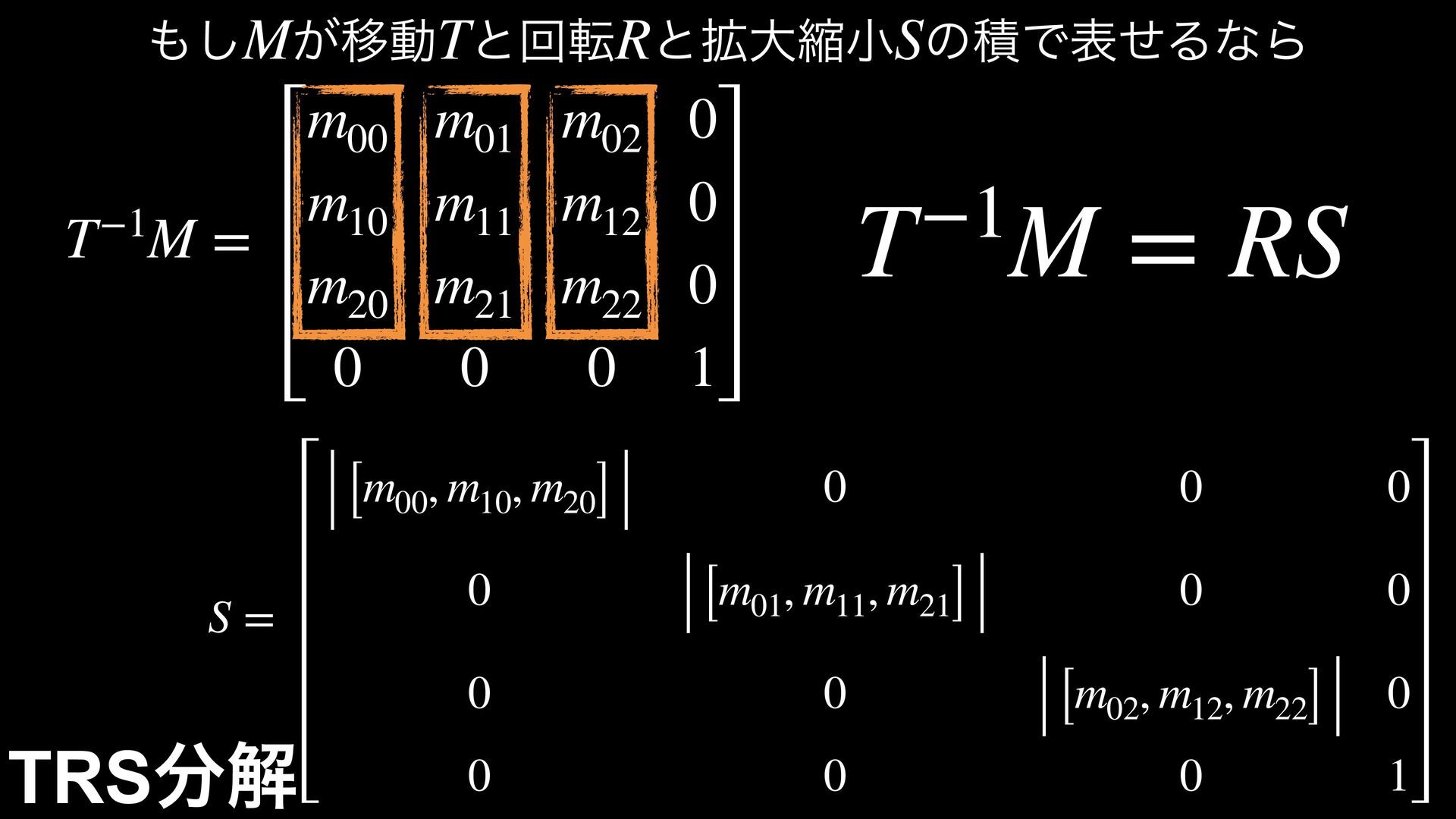
![T−1MS−1 = m00 [m00 , m10 , m20] m01 [m01](https://files.speakerdeck.com/presentations/8d2f8f6111834fb9a4db56f43193683a/slide_76.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}