principles together with the consideration of its energy and computational impact, leads to UbiComp environments where heterogeneous devices communicate autonomously in an uncoupled and interoperable fashion.
principles together with the consideration of its energy and computational impact, leads to UbiComp environments where heterogeneous devices communicate autonomously in an uncoupled and interoperable fashion.
principles together with the consideration of its energy and computational impact, leads to UbiComp environments where heterogeneous devices communicate autonomously in an uncoupled and interoperable fashion.
applications [WoT2012] RESTful Triple Spaces of Things [IEEESensors2011] Collaboration of Sensors and Actuators through Triple Spaces. [WoT2011] On the complementarity of Triple Spaces and the Web of Things.
computation (C) and energy (E), because: Management tasks are delegated to the most powerful devices in the space (C+E) The search is improved avoiding many unnecessary requests (C+E) If the Provider cannot process the aggregated clue, it can delegate it on the WP (C) The WP selection process prioritizes cases where less providers are forced to resend their last clue version (E).
d e u s t o t e c h / l i g h t s H T T P / 1 . 1 H o s t : d e u s t o . e u H T T P / 1 . 0 2 0 0 O K D a t e : S a t , 1 4 J u n 2 0 1 4 2 1 : 2 2 : 0 1 G M T C o n t e n t - t y p e : t e x t / n 3 ; c h a r s e t = U T F - 8 C o n t e n t - L e n g t h : 5 1 2 { a c t u a t o r s : l i g h t s s n : m a d e O b s e r v a t i o n ? l i g h t _ o b s . } = > { _ : r e q u e s t h t t p : m e t h o d N a m e " G E T " ; h t t p : r e q u e s t U R I ? l i g h t _ o b s ; h t t p : r e s p [ h t t p : b o d y ? l i g h t _ o b s ] . ? l i g h t _ o b s a s s n : O b s e r v a t i o n ; s s n : o b s e r v e d P r o p e r t y s w e e t : L i g h t ; . . .
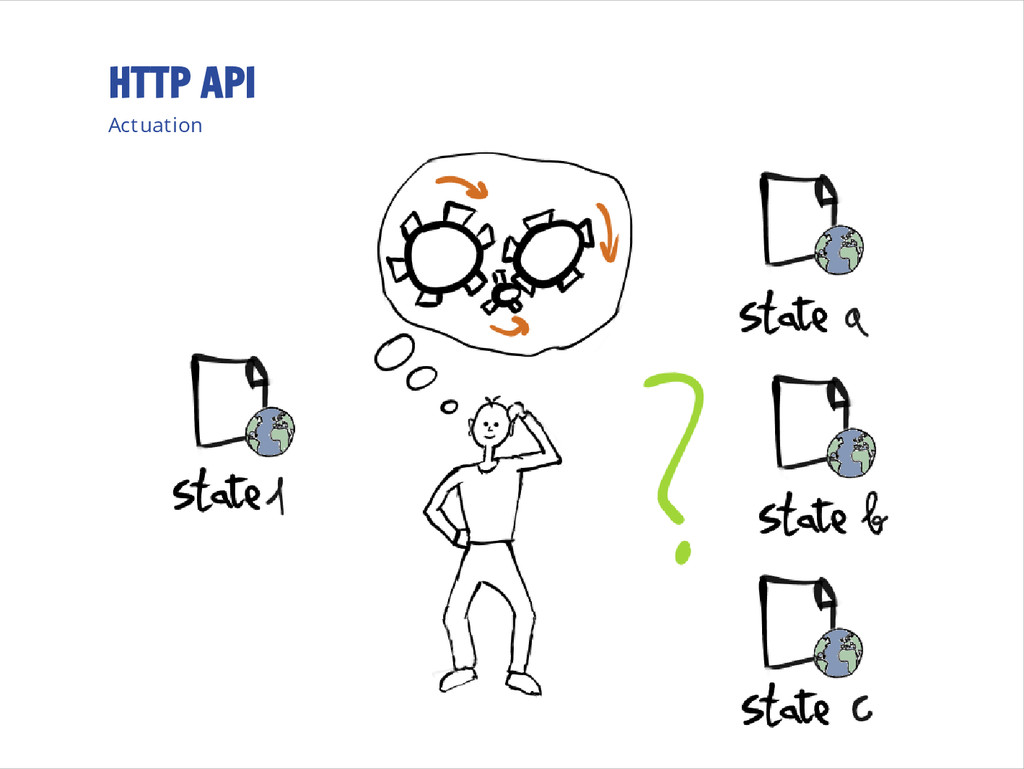
Is the translation between the subscriptions and the goal always possible? If the plan has 2 or more paths to achieve a goal, which one should we chose? What if two different actuators from space-based and rest-based actuation can be activated?
principles together with the consideration of its energy and computational impact, leads to UbiComp environments where heterogeneous devices communicate autonomously in an uncoupled and interoperable fashion.
principles together with the consideration of its energy and computational impact, leads to UbiComp environments where heterogeneous devices communicate autonomously in an uncoupled and interoperable fashion.
principles together with the consideration of its energy and computational impact, leads to UbiComp environments where heterogeneous devices communicate autonomously in an uncoupled and interoperable fashion.
principles together with the consideration of its energy and computational impact, leads to UbiComp environments where heterogeneous devices communicate autonomously in an uncoupled and interoperable fashion.
principles together with the consideration of its energy and computational impact, leads to UbiComp environments where heterogeneous devices communicate autonomously in an uncoupled and interoperable fashion.
ambient intelligence applications [WoT2012] RESTful Triple Spaces of Things [IEEESensors2011] Collaboration of Sensors and Actuators through Triple Spaces. [WoT2011] On the complementarity of Triple Spaces and the Web of Things.
[JUCS2013] Enabling user access control in energy-constrained wireless smart environments. [CISIS2013] Extending a user access control proposal for wireless network services with hierarchical user credentials. [UCAmI2012] Lightweight user access control in energy- constrained wireless network services.
of different domains: [IWAAL2011] Easing the mobility of disabled people in supermarkets using a distributed solution. In Ambient Assisted Living, n. 6693 in LNCS, pp. 41–48, January 2011. [Robot2011] Distributed semantic middleware for social robotic services [IWAAL2011] Distributed tracking system for patients with cognitive impairments.
open-sourced the following software: A parametrizable simulation environment https://github.com/gomezgoiri/Semantic-WoT-Environment-Simulation The three different implementations of the same basic actuation scenario presented before https://github.com/gomezgoiri/reusingWebActuatorsFromSemanticSpace A TSC-based middleware: Otsopack https://github.com/gomezgoiri/otsopack
projects: THOFU (CEN-20101019), funded by the Spanish Centro para el Desarrollo Tecnológico Industrial (CDTI) and supported by the the Spanish Ministry of Science and Innovation. ACROSS (TSI-020301-2009-27), funded by the Spanish Ministerio de Industria, Turismo y Comercio. TALIS+ENGINE (TIN2010-20510-C04-03), funded by the Spanish Ministry of Science and Innovation. ISMED (PC2008-28), funded by the Department of Education, Universities and Research of the Basque Government for the period 2008-10.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
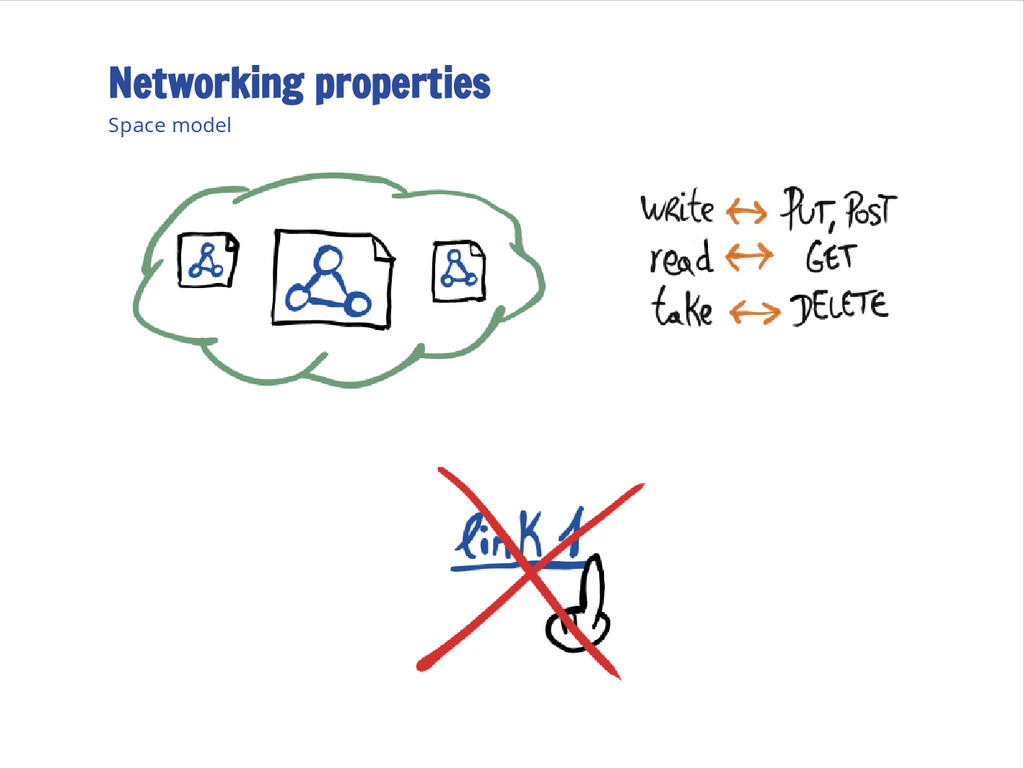
![Space model [CHB2014] Lightweight semantic framework for interoperable ambient intelligence](https://files.speakerdeck.com/presentations/8e910d10efc60131b03012d2d24fcad8/slide_44.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Energy-aware search architecture [IJWGS2014] Energy-aware architecture for information search in](https://files.speakerdeck.com/presentations/8e910d10efc60131b03012d2d24fcad8/slide_59.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Actuation [esIoT2014] Reusing web-enabled actuators from a semantic space-based perspective.](https://files.speakerdeck.com/presentations/8e910d10efc60131b03012d2d24fcad8/slide_101.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Scientific contributions: space model [CHB2014] Lightweight semantic framework for interoperable](https://files.speakerdeck.com/presentations/8e910d10efc60131b03012d2d24fcad8/slide_154.jpg){kind=link}
![Scientific contributions: search architecture [IJWGS2014] Energy-aware architecture for information search](https://files.speakerdeck.com/presentations/8e910d10efc60131b03012d2d24fcad8/slide_155.jpg){kind=link}
![Scientific contributions: actuation [esIoT2014] Reusing web-enabled actuators from a semantic](https://files.speakerdeck.com/presentations/8e910d10efc60131b03012d2d24fcad8/slide_156.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}