Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
RSJ2025「オープンハードウェアと学習制御」チュートリアル2025(河原塚)
Search
Kento Kawaharazuka
September 04, 2025
780
3
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
RSJ2025「オープンハードウェアと学習制御」チュートリアル2025(河原塚)
Kento Kawaharazuka
September 04, 2025
More Decks by Kento Kawaharazuka
See All by Kento Kawaharazuka
RSJ2025「基盤モデルの実ロボット応用」チュートリアル2025-1(河原塚)
haraduka
2
1.6k
MIRU2025 チュートリアル講演「ロボット基盤モデルの最前線」
haraduka
15
14k
Data-centric AI勉強会 「ロボットにおけるData-centric AI」
haraduka
1
1.2k
RSJ2024学術ランチョンセミナー「若手・中堅による国際化リーダーシップに向けて」資料 (河原塚)
haraduka
0
690
RSJ2024「基盤モデルの実ロボット応用」チュートリアルA(河原塚)
haraduka
3
1.6k
RSJ2023「基盤モデルの実ロボット応用」チュートリアル1(既存の基盤モデルを実ロボットに応用する方法)
haraduka
5
2.8k
Featured
See All Featured
Understanding Cognitive Biases in Performance Measurement
bluesmoon
32
3k
Ten Tips & Tricks for a 🌱 transition
stuffmc
0
150
CSS Pre-Processors: Stylus, Less & Sass
bermonpainter
360
30k
Mozcon NYC 2025: Stop Losing SEO Traffic
samtorres
1
410
Become a Pro
speakerdeck
PRO
31
6k
Designing for humans not robots
tammielis
254
26k
ReactJS: Keep Simple. Everything can be a component!
pedronauck
666
130k
Discover your Explorer Soul
emna__ayadi
2
1.2k
10 Git Anti Patterns You Should be Aware of
lemiorhan
PRO
659
62k
jQuery: Nuts, Bolts and Bling
dougneiner
66
8.5k
Build your cross-platform service in a week with App Engine
jlugia
234
18k
JAMstack: Web Apps at Ludicrous Speed - All Things Open 2022
reverentgeek
1
500
Transcript
オープンハードウェアと学習制御 チュートリアル2025 河原塚 健人 (東京大学) 1 2025.09.05 (9:00-9:15) RSJ2025, OS14,
3M1-01
本オーガナイズドセッションの目的 • 機械学習アルゴリズムのオープンソース化が流行している • その波はオープンハードウェアという形でロボットにも! • 日本と言えばハードウェアでしょ!? • 日本のオープンハードウェアを盛り上げて交流しましょう! 2
河原塚 健人 (東京大学) 室岡 雅樹 (産総研) 中川 友紀子 (アールティ) 尾形 哲也 (早稲田大学)
オープンハードウェアと学習制御OS 3 RSJ2025 • 4セッション / 18件の発表 + 総合討論 •
主な参加者 • アールティ, トヨタ, ファジイロボ研, etc. • 産総研 • 東大, 筑波大, 都立大, 創価大, 名工大, 名城大, 京大, 埼大, Science Tokyo… 初回の開催にも関わらず高い関心
クローズド vs. オープン 4 Solo12 [F. Grimminger+, RA-L, 2020] Unitree
Go2 • ハードウェアをいじりにくい • 低レイヤがいじりにくい • 壊れたら修理依頼 • 自由にハードウェアを改変できる • 低レイヤまで含めて自由に改変可能 • 自分で簡単に直せる クローズド オープン
なぜオープンにするのか? 🔗つながる • 共同研究やフィードバックの輪が広がり研究コミュニティが活性化 🌱そだてる • 誰もが学べることで教育的な価値が生まれ, 技術力の底上げへ 🔁ひろがる •
再現実装や派生開発が促され, 技術が他分野/他チームへと広がり強固なエコシステムへ 📏ためせる • 共通のベンチマークとして機能し, 各手法やアルゴリズムの公平な比較・評価へ 5
どんなオープンハードウェアがある? 6 四脚ロボット 二脚ロボット・ ヒューマノイド マニピュレータ ハンド・グリッパー
四脚ロボット 7 Solo12 [F. Grimminger+, RA-L, 2020] MEVIUS [K. Kawaharazuka+,
Humanoids2024] PAWDQ [J. Kim+, UR2021] Stanford Doggo [N. Kau+, ICRA2019] OpenQuadruped [M. Rahme+, IROS2021]
二脚ロボット・ヒューマノイド 8 Berkeley Humanoid Lite [Y. Chi+, RSS2025] ToddlerBot [H.
Shi+, arXiv, 2025] Duke Humanoid [B. Xia+, arXiv, 2024] MEVITA [K. Kawaharazuka+, Humanoids2025] K-scale labs
マニピュレータ 9 ALOHA 2 [Deepmind, 2024] SO-101 [HuggingFace, 2025] OpenArm
[Enactic, 2025] PAMY2 [S. Guist, RSS2024]
ハンド・グリッパー 10 UMI [C. Chi, RSS2024] Orca Hand [C. C.
Christoph, arXiv, 2025] LEAP Hand [K. Shaw+, RSS2023]
周辺技術 11 IsaacGym IsaacSim Genesis
日本でオープンハードをやる強み • MISUMI, Monotaro, ねじno1, 秋月など, (中国を除く)他の国と 比べても非常に充実した機械・回路部品の数々 • meviyによる金属加工部品の自動見積もりと型番共有
12
我々の活動 これまでのオープンソースロボットの特徴 • ほとんどが3Dプリンタ • それでいいのか. 強化学習や不整地に耐えられますか? • 金属製
• 金属製も無くはない. でも部品点数が多い • 組み立てが難しい, 発注も大変 • 部品点数の最小化 13
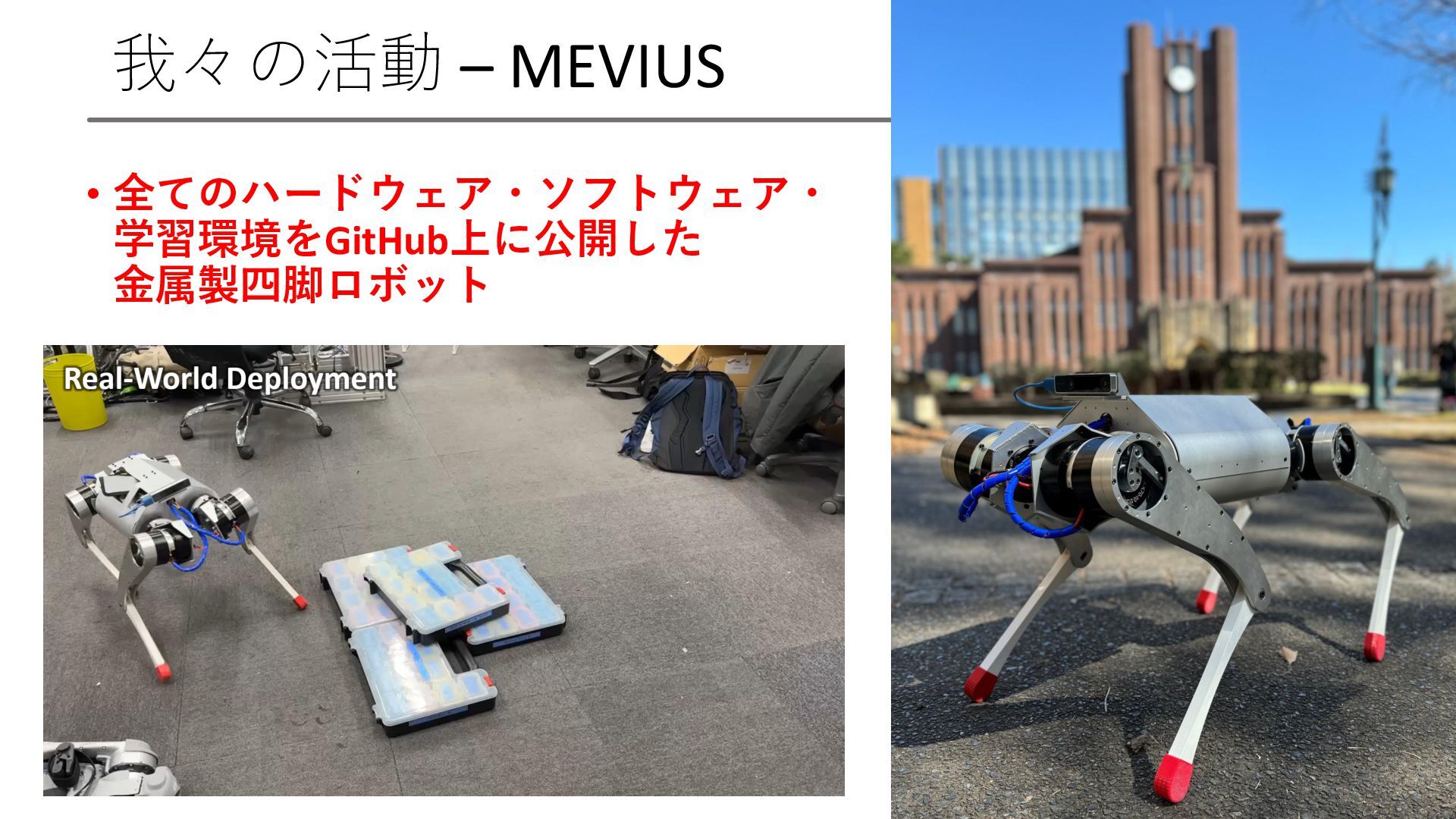
我々の活動 – MEVIUS • 全てのハードウェア・ソフトウェア・ 学習環境をGitHub上に公開した 金属製四脚ロボット 14
我々の活動 – KLEIYN • MEVIUSに腰関節をつけた進化系であり, 壁の間を登ることができる 15
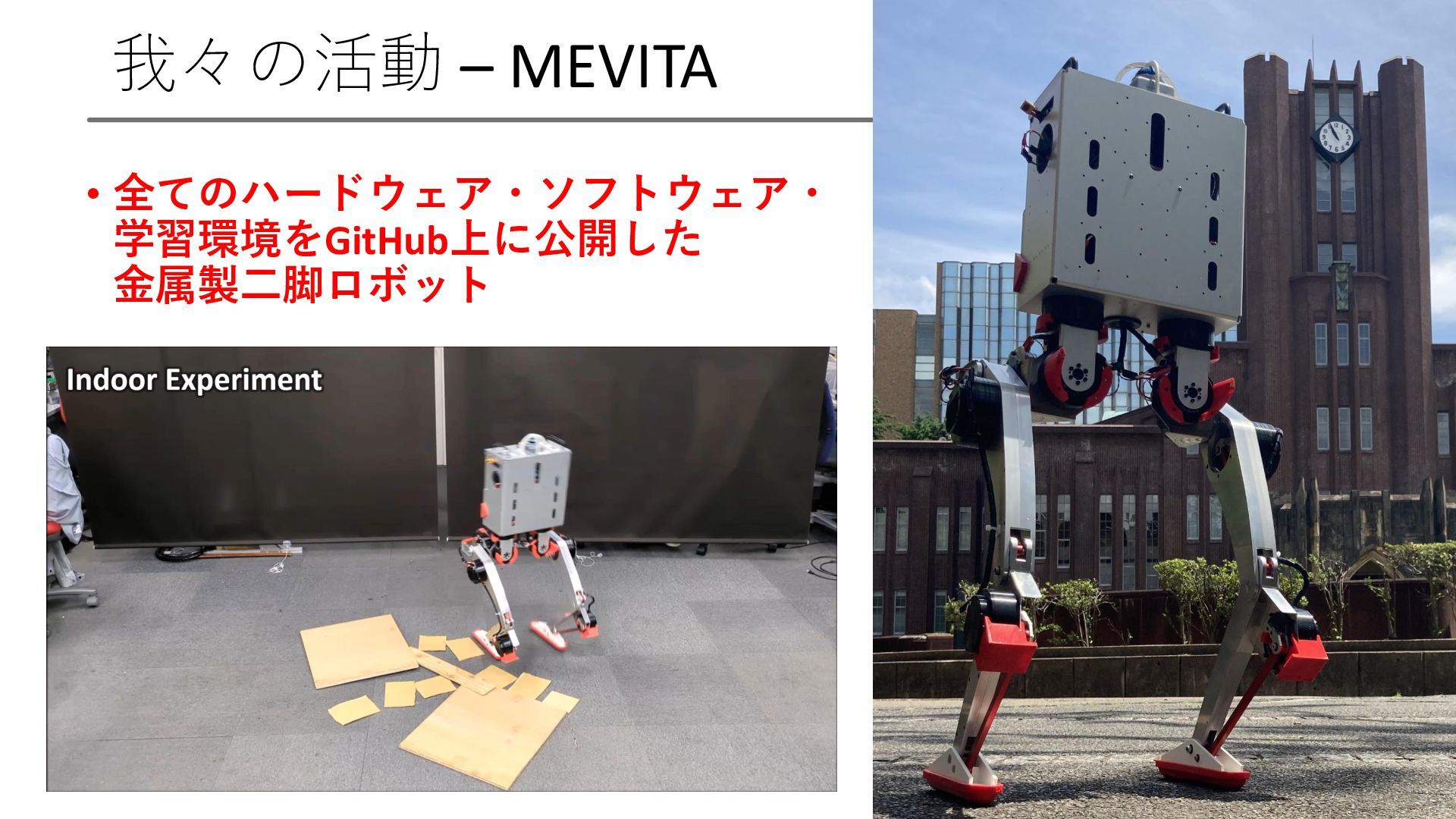
我々の活動 – MEVITA • 全てのハードウェア・ソフトウェア・ 学習環境をGitHub上に公開した 金属製二脚ロボット 16
まとめと結論 • チュートリアル2025 • ハードウェアをオープンにすることの意義 • どんなオープンハードウェアがあるのか? • 周辺技術と日本の強み •
我々の活動: MEVIUS, KLEIYN, MEVITAについて • オープンハードウェアはこれからより大きくなっていく! • ぜひ一緒に盛り上げていきましょう! 17
ワークショップ @CoRL2025 • Open-Source Hardware in the Era of Robot
Learning @ CoRL2025 18
{kind=link}
{kind=link}
{kind=link}
![クローズド vs. オープン 4 Solo12 [F. Grimminger+, RA-L, 2020] Unitree](https://files.speakerdeck.com/presentations/1ab66cd88dbb49d4a8f9beb5e60f4dbb/slide_3.jpg){kind=link}
{kind=link}
{kind=link}
![四脚ロボット 7 Solo12 [F. Grimminger+, RA-L, 2020] MEVIUS [K. Kawaharazuka+,](https://files.speakerdeck.com/presentations/1ab66cd88dbb49d4a8f9beb5e60f4dbb/slide_6.jpg){kind=link}
![二脚ロボット・ヒューマノイド 8 Berkeley Humanoid Lite [Y. Chi+, RSS2025] ToddlerBot [H.](https://files.speakerdeck.com/presentations/1ab66cd88dbb49d4a8f9beb5e60f4dbb/slide_7.jpg){kind=link}
![マニピュレータ 9 ALOHA 2 [Deepmind, 2024] SO-101 [HuggingFace, 2025] OpenArm](https://files.speakerdeck.com/presentations/1ab66cd88dbb49d4a8f9beb5e60f4dbb/slide_8.jpg){kind=link}
![ハンド・グリッパー 10 UMI [C. Chi, RSS2024] Orca Hand [C. C.](https://files.speakerdeck.com/presentations/1ab66cd88dbb49d4a8f9beb5e60f4dbb/slide_9.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}