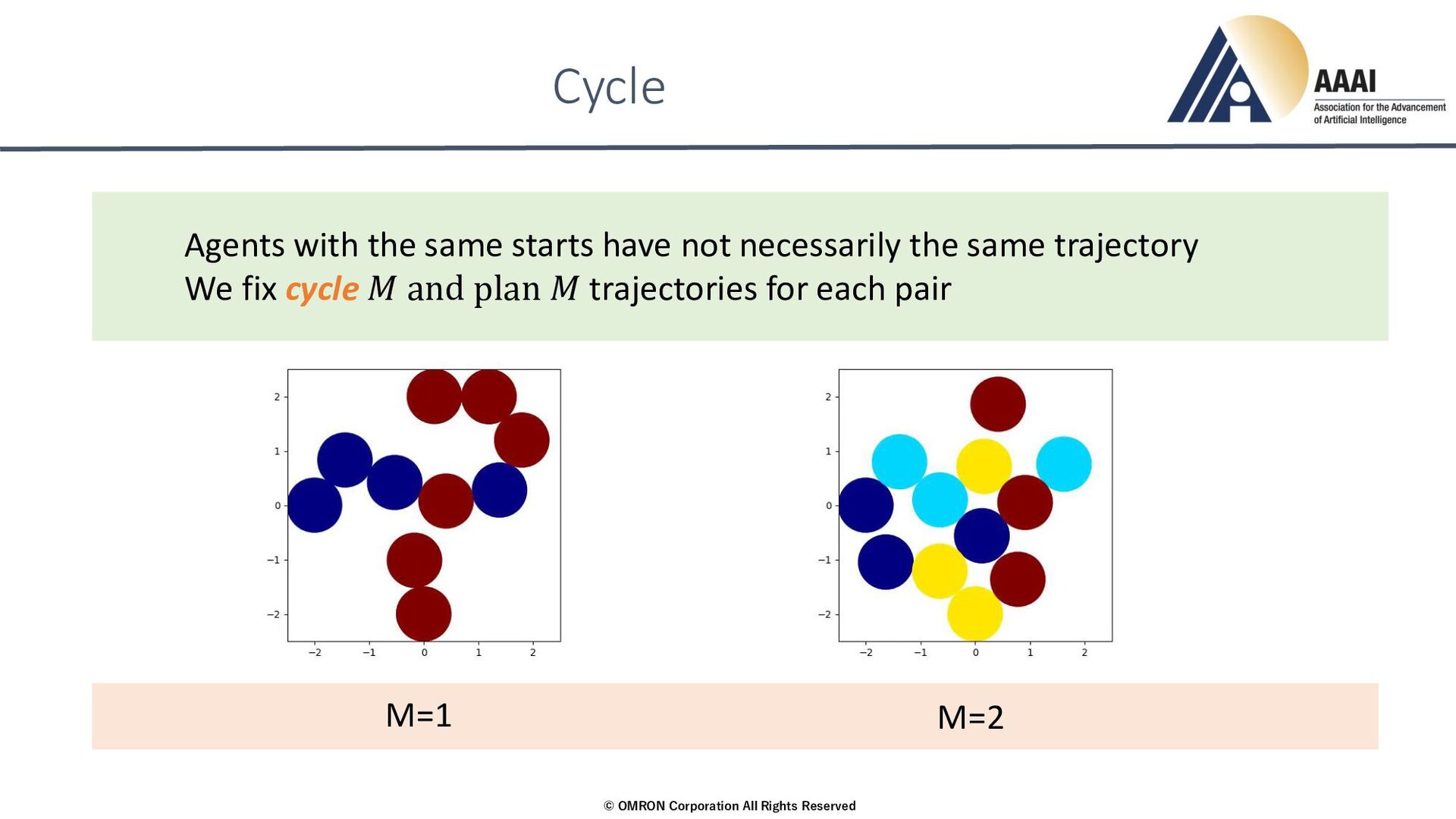
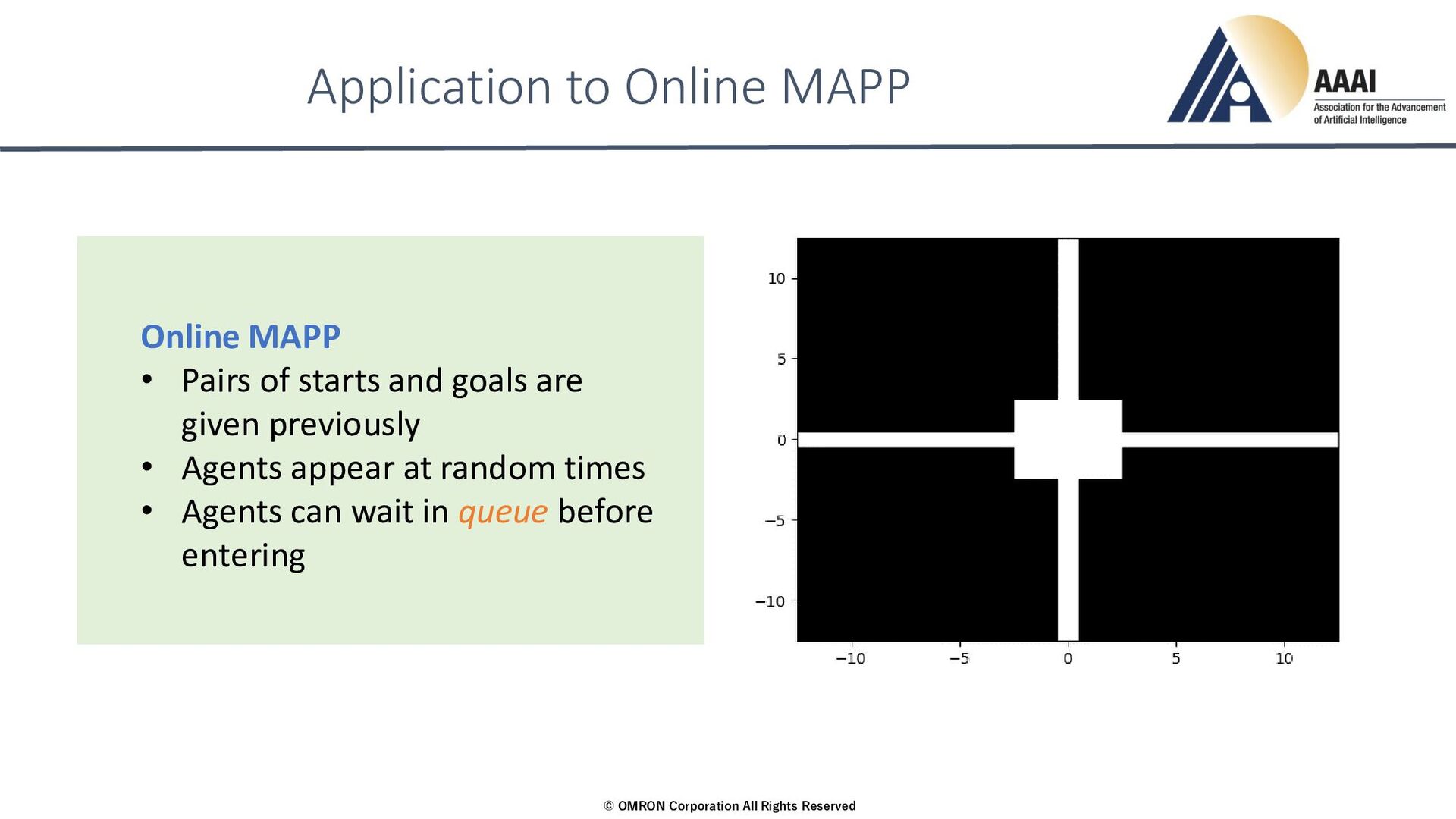
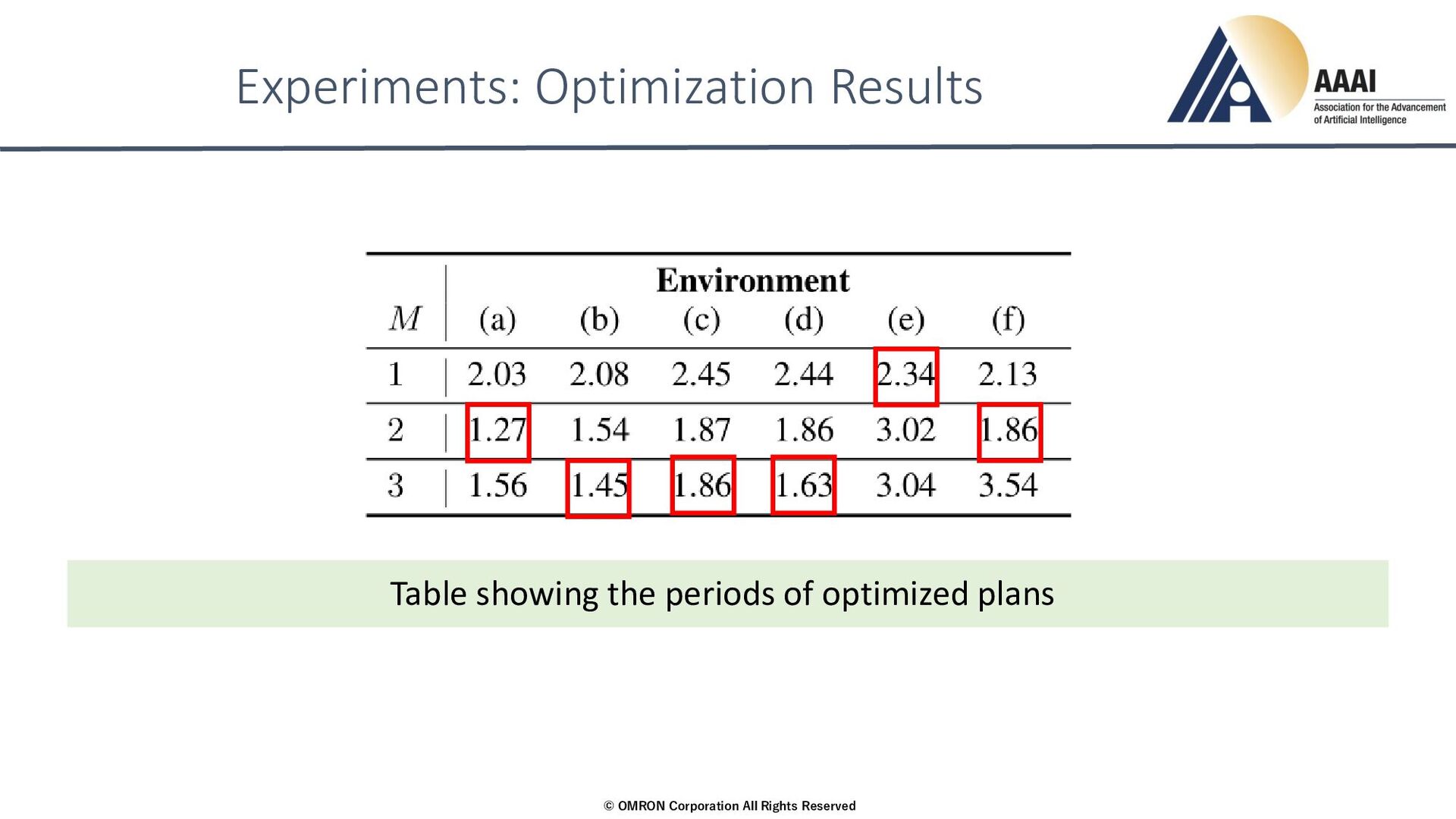
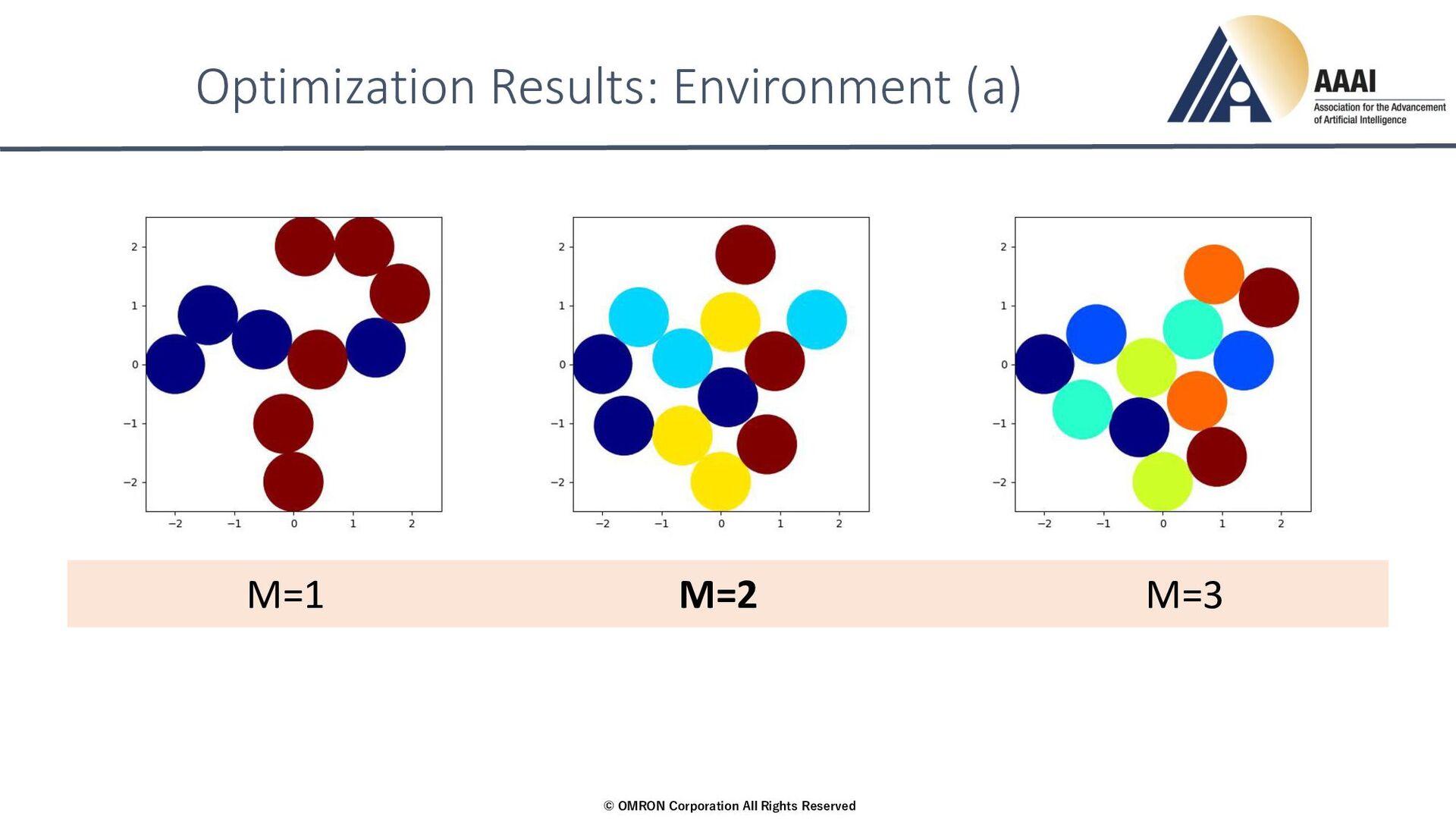
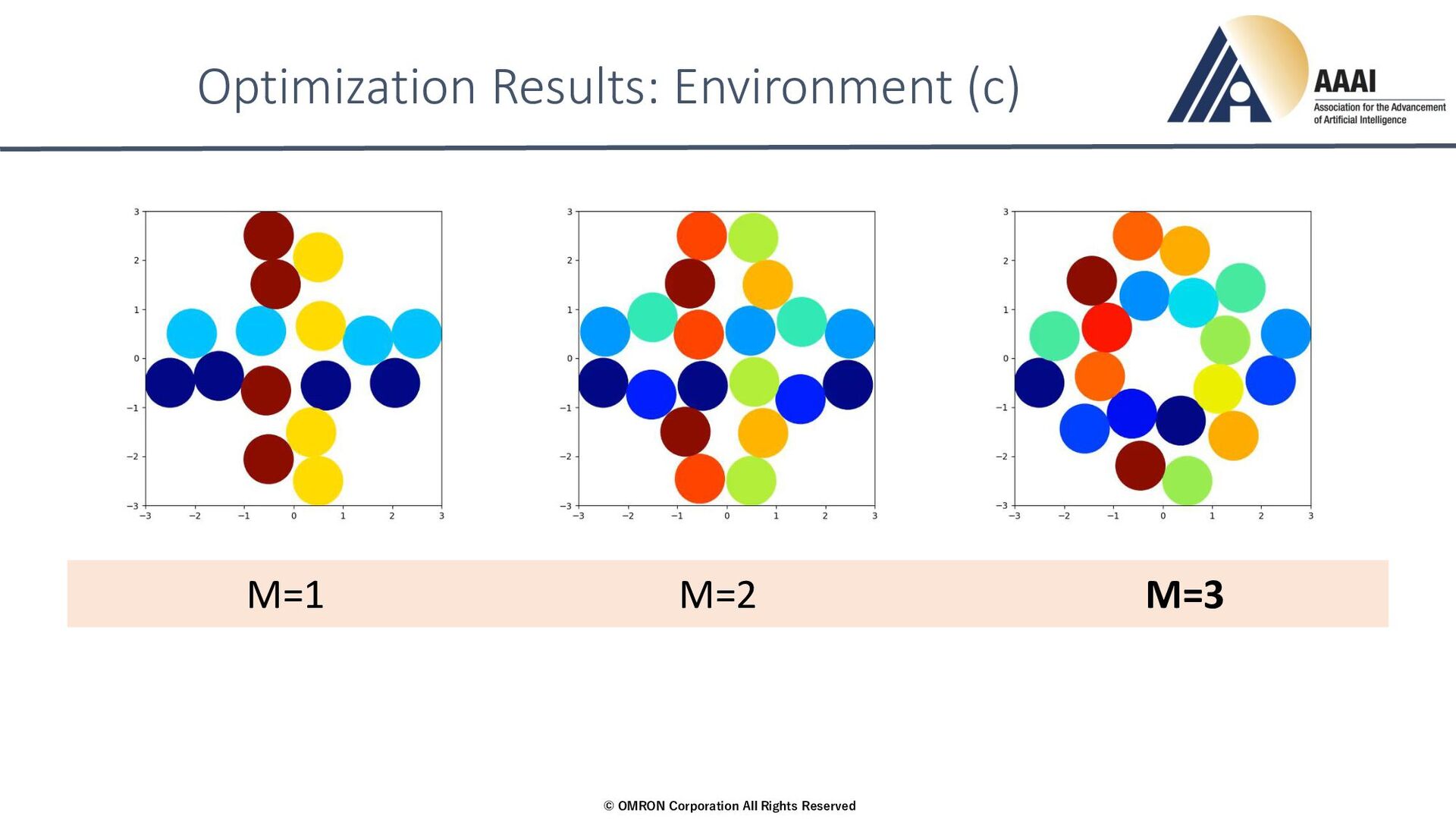
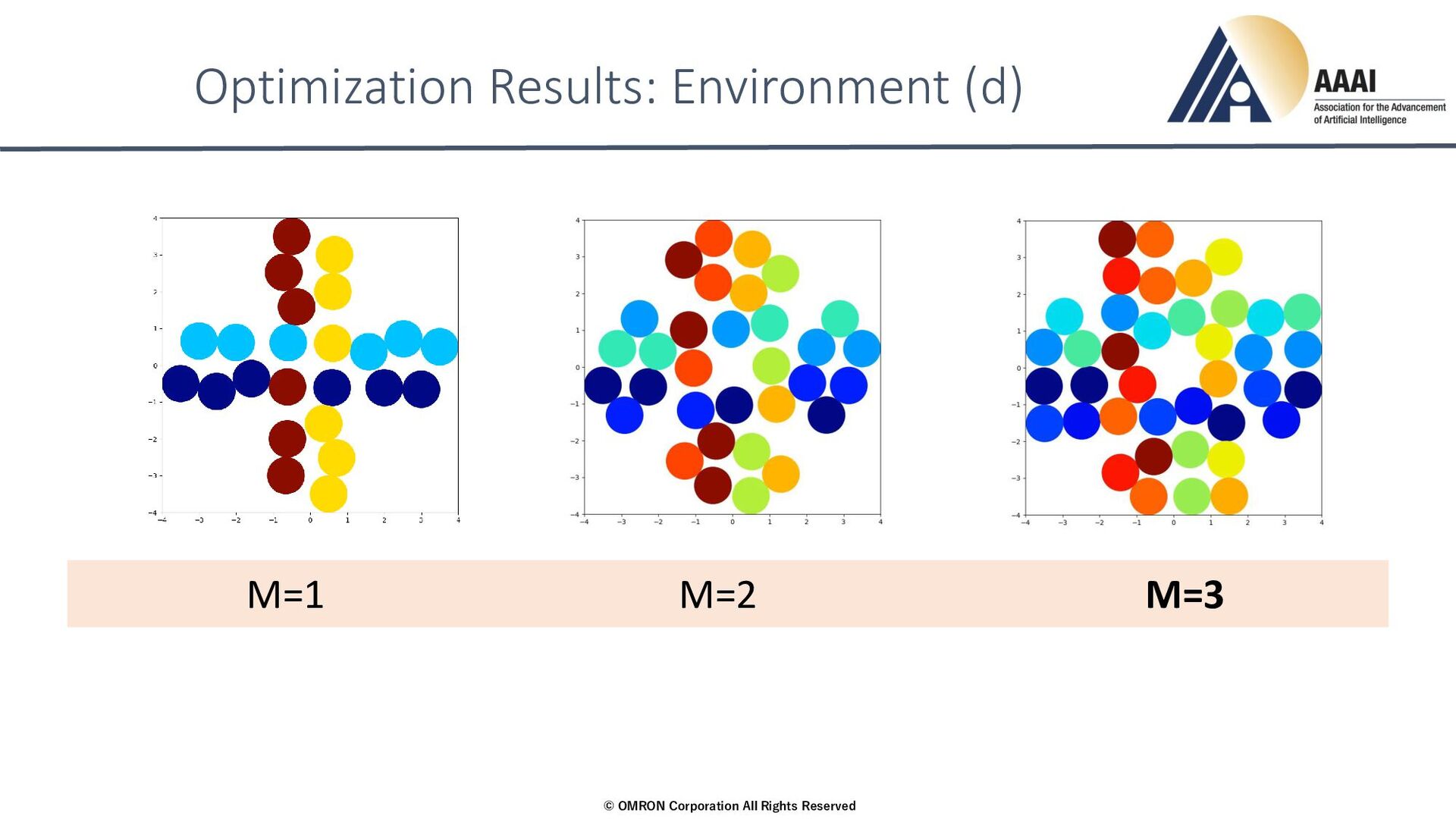
Given: Environment E Pairs (𝑠1 , 𝑔1 ), … , (𝑠𝑁 , 𝑔𝑁 ) of starts and goals Want: Collision-free trajectories for agents appearing periodically with a user-defined period Objective: Period that is as small as possible
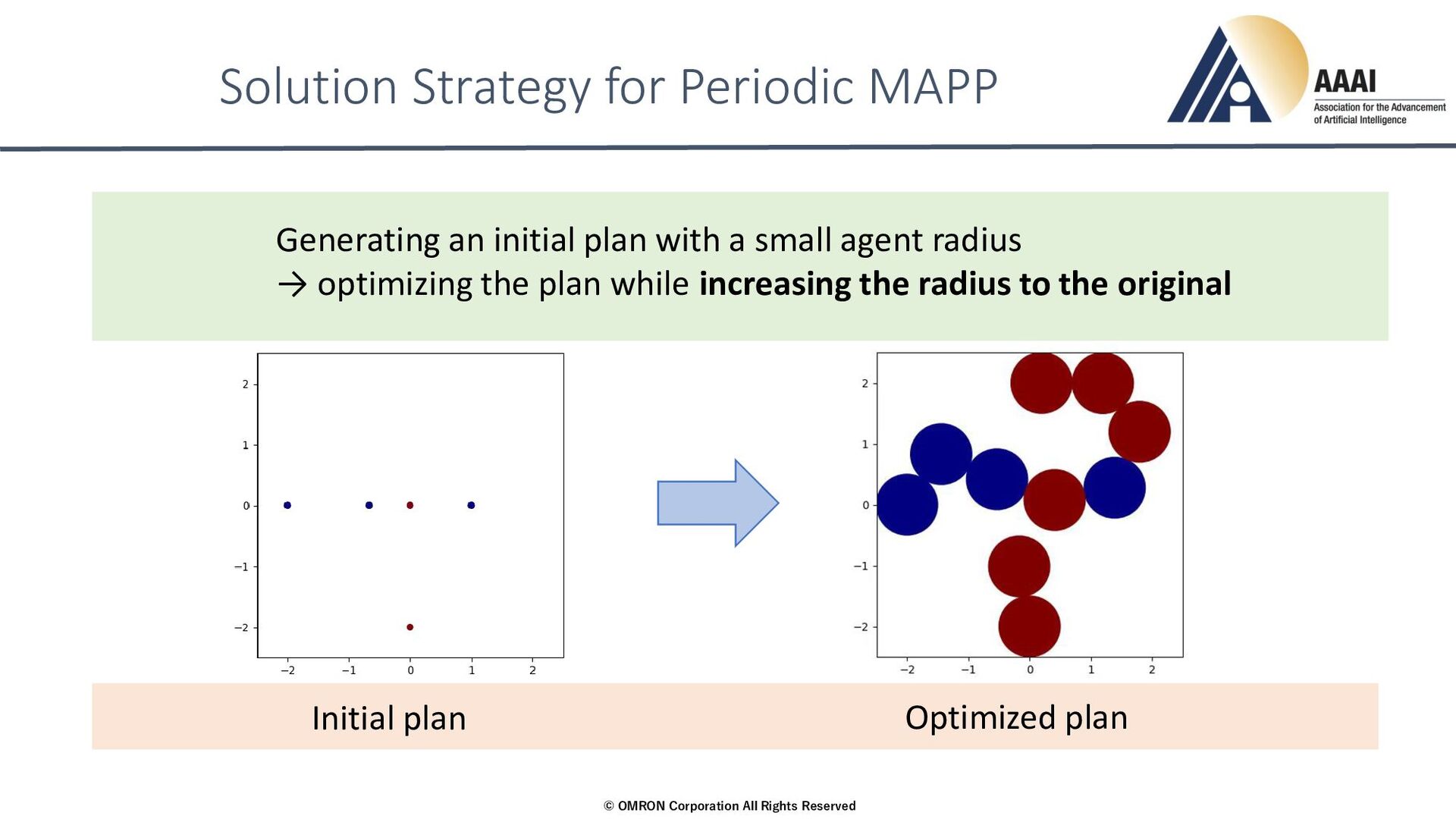
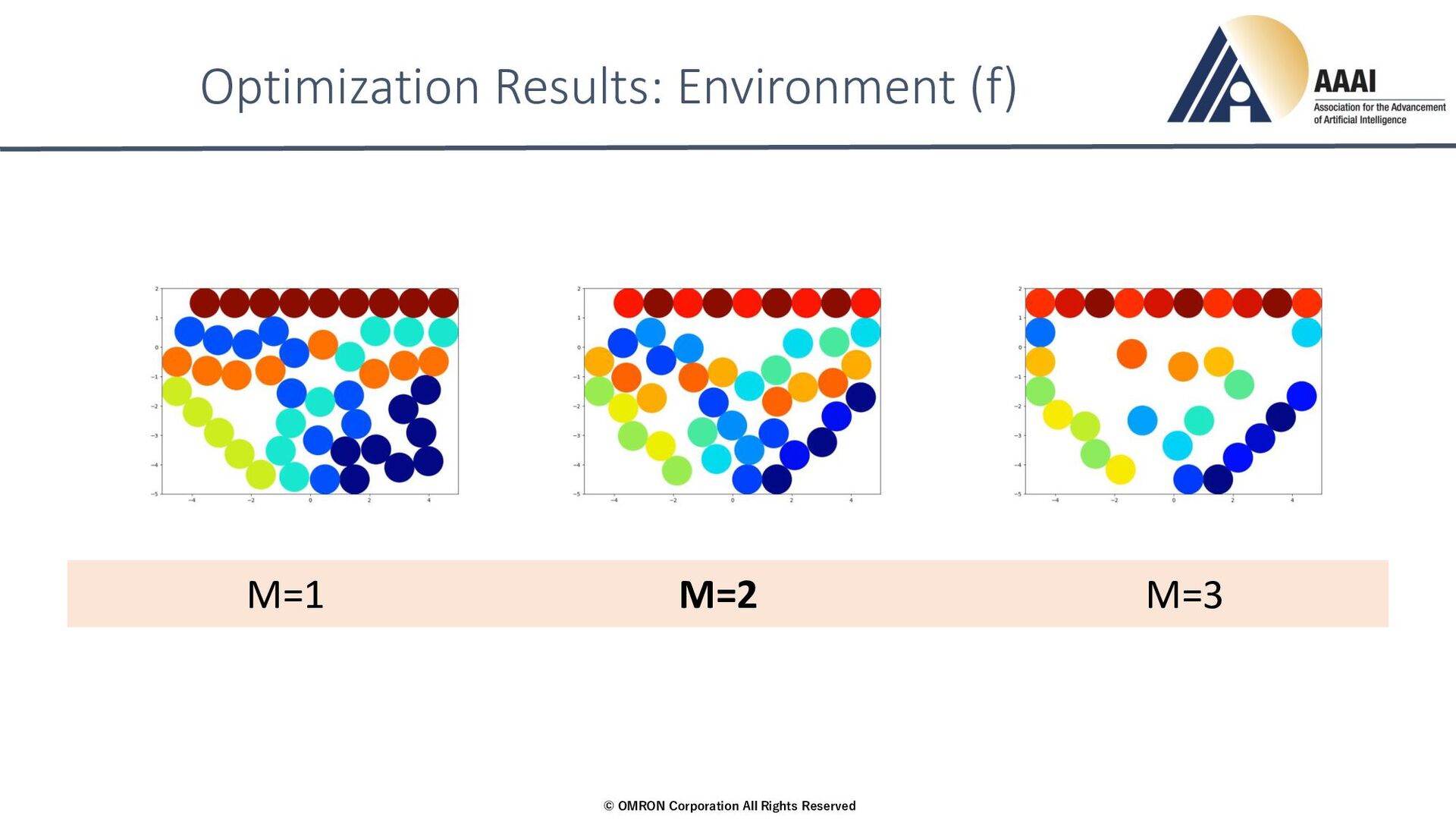
MAPP Generating an initial plan with a small agent radius → optimizing the plan while increasing the radius to the original Initial plan Optimized plan
• Simple geometry and kinematics for agents → More realistic models of agents by modifying constraints • Assumption that agents can trace planned trajectory exactly → Consideration for uncertainties • Investigation of values of cycle and initial plans
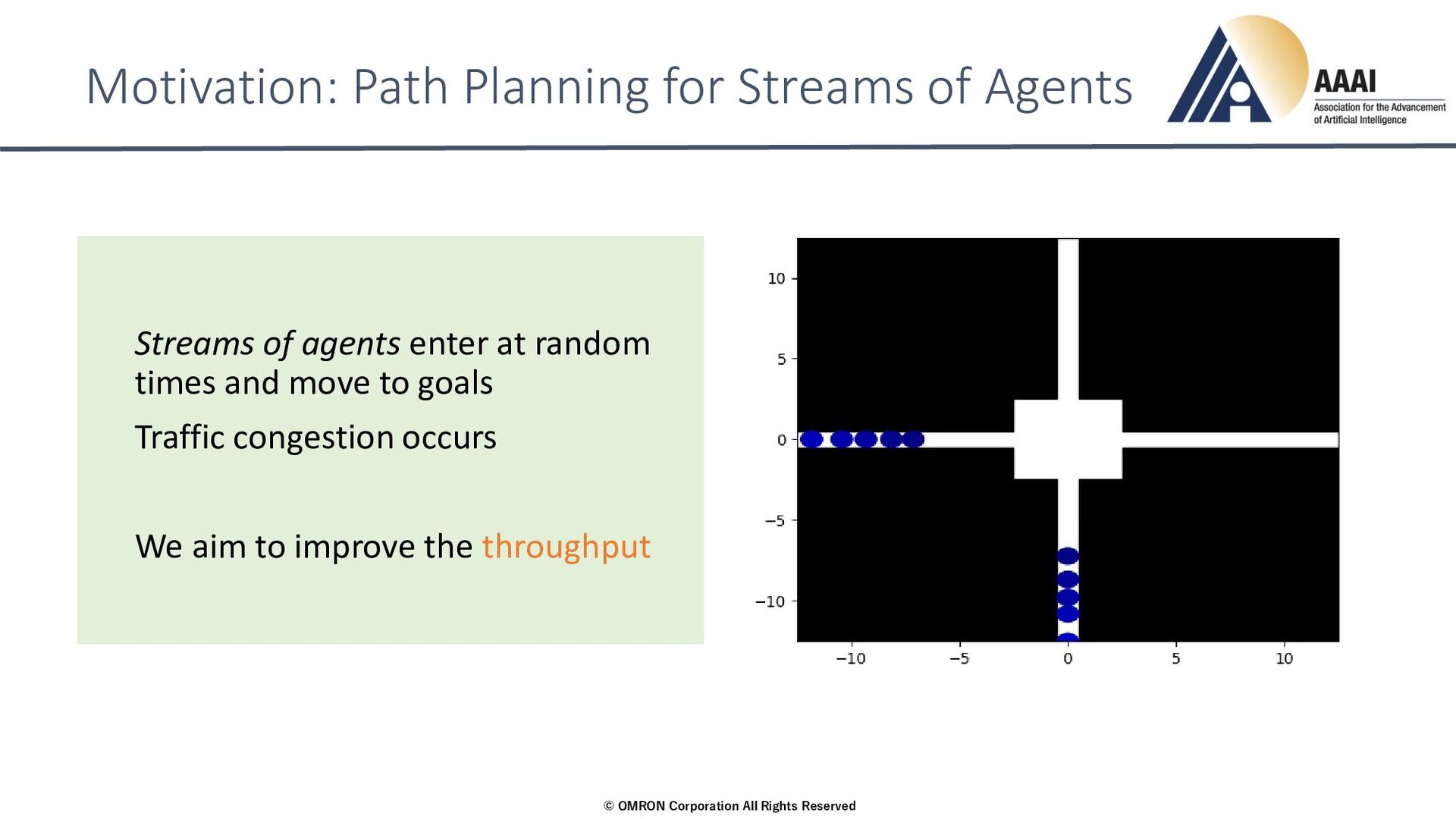
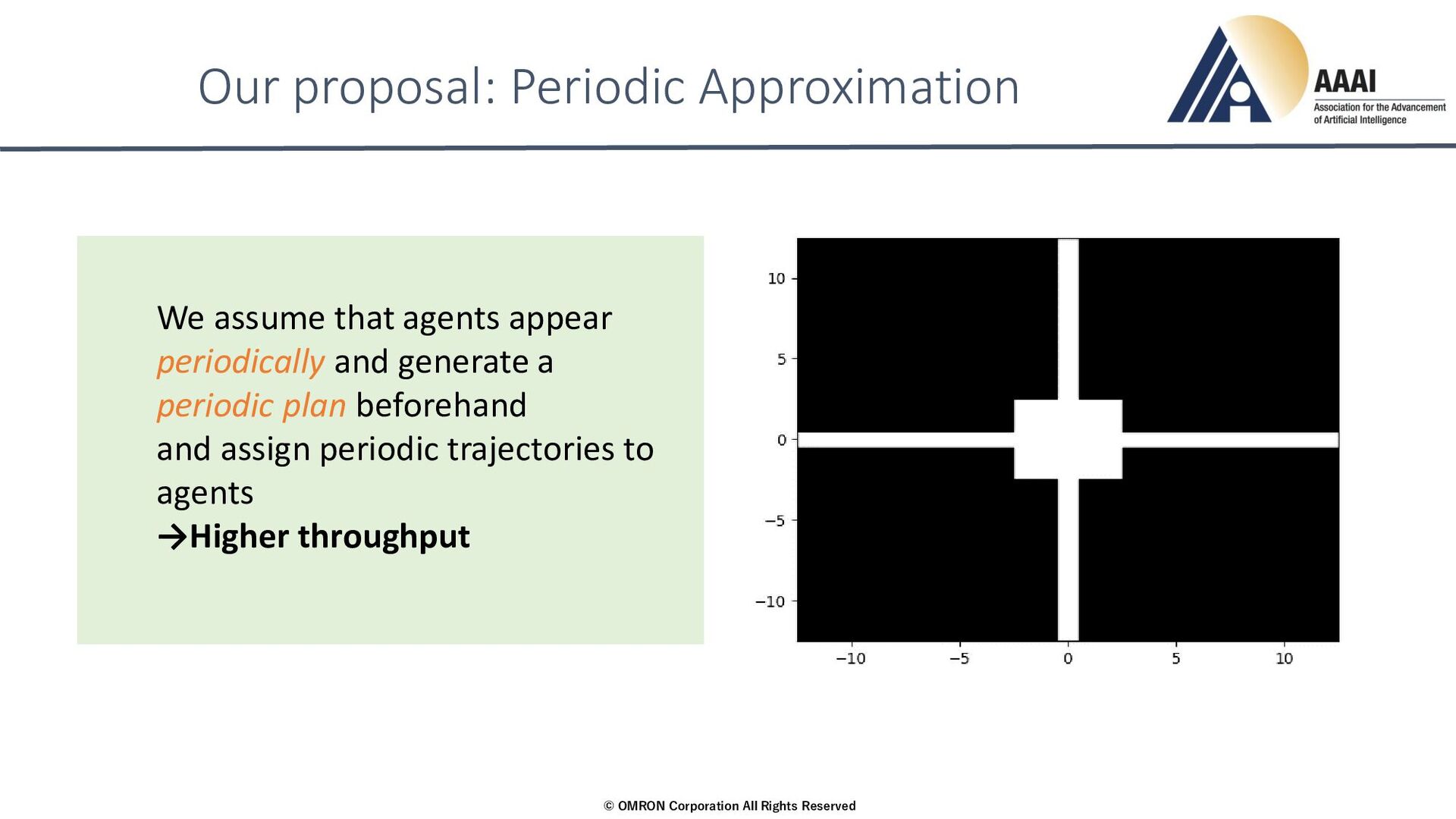
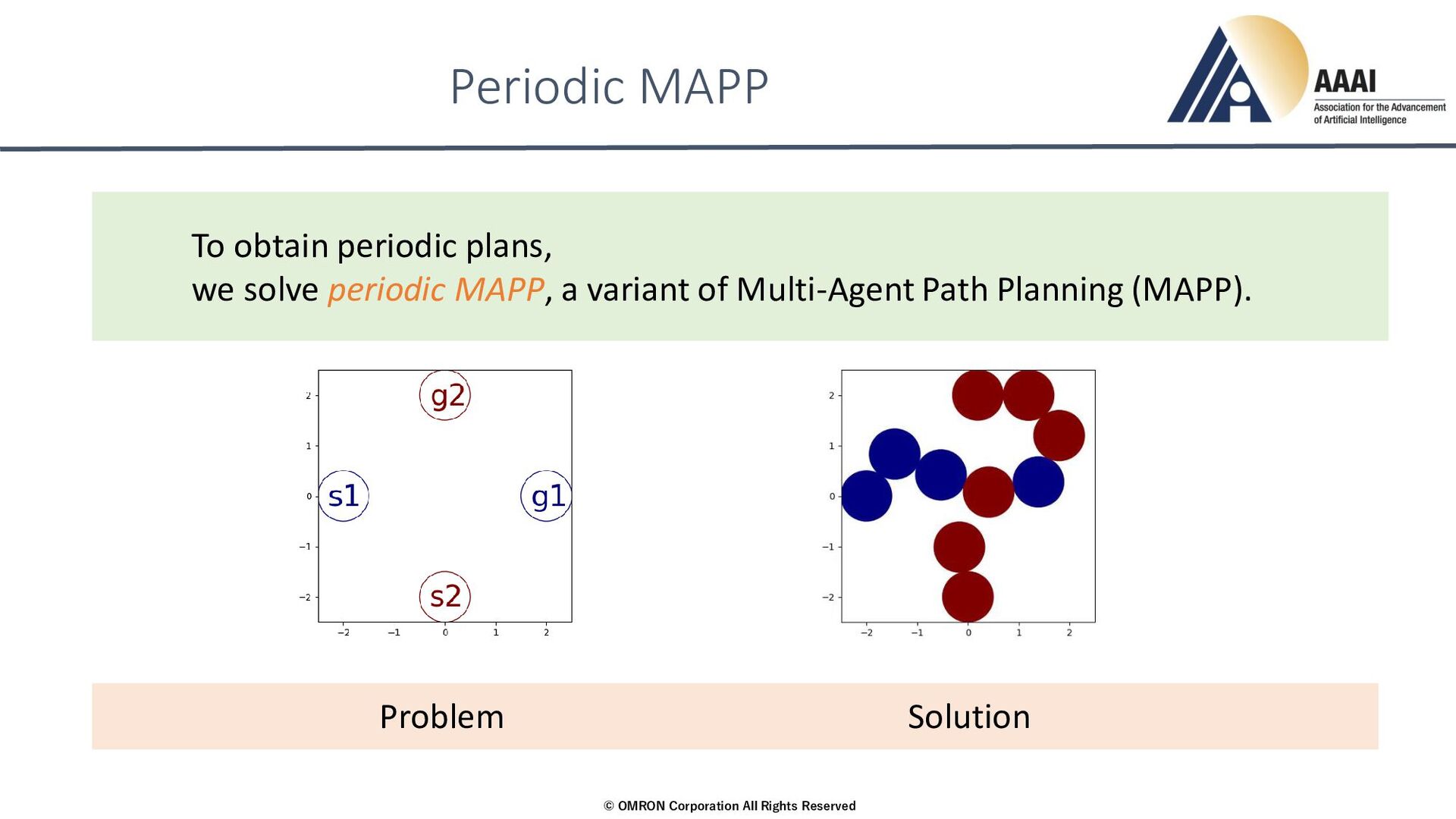
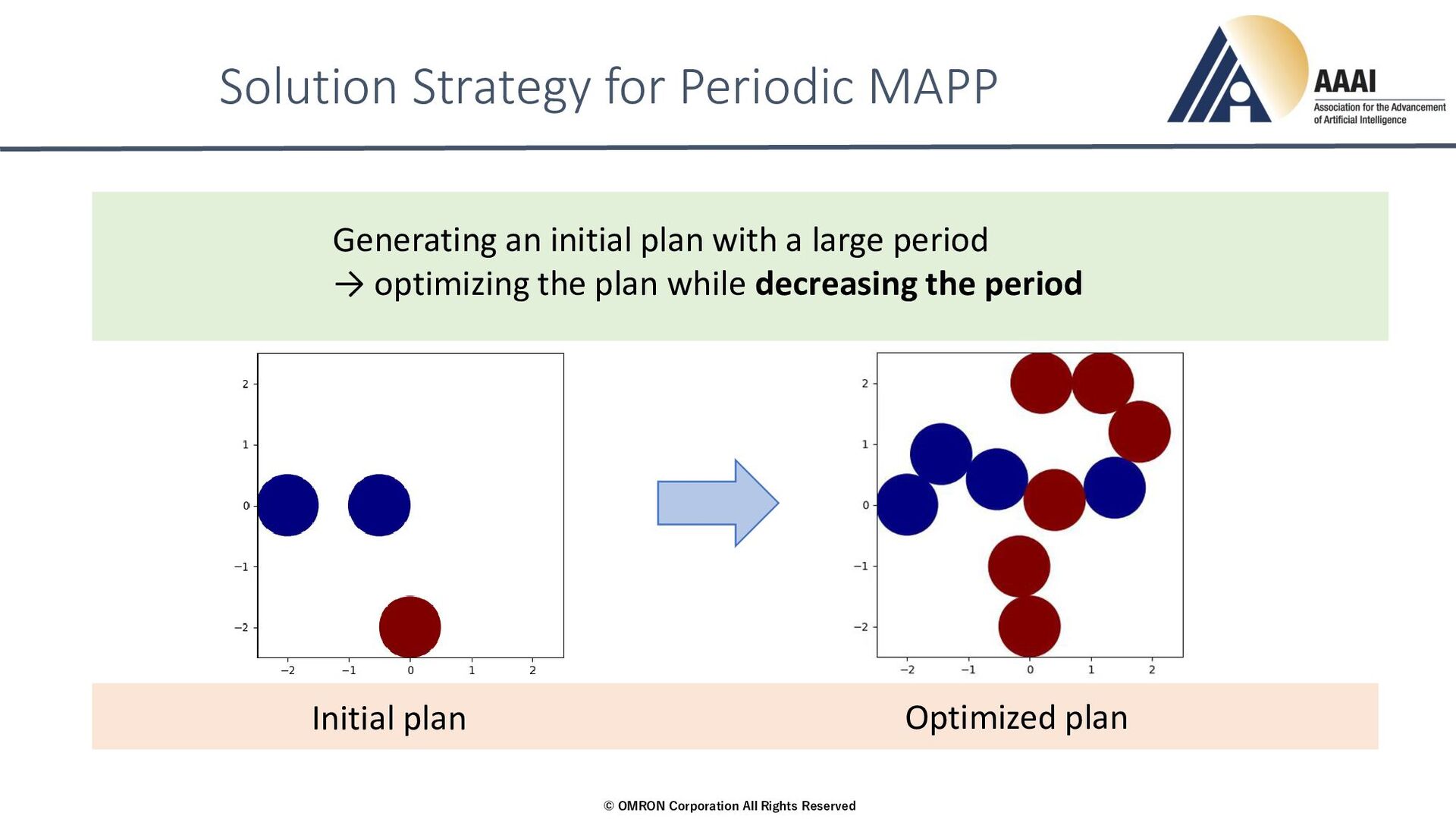
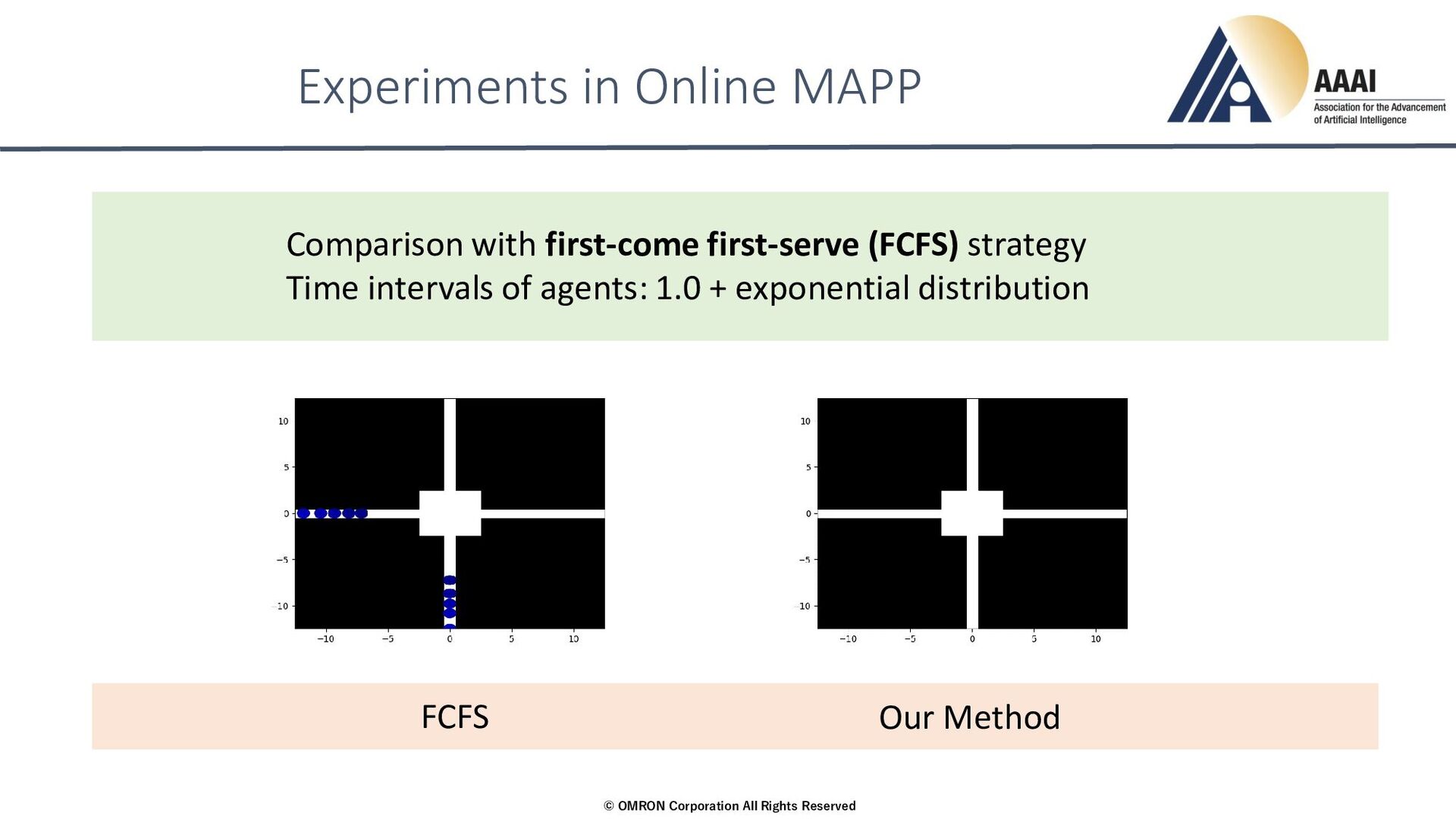
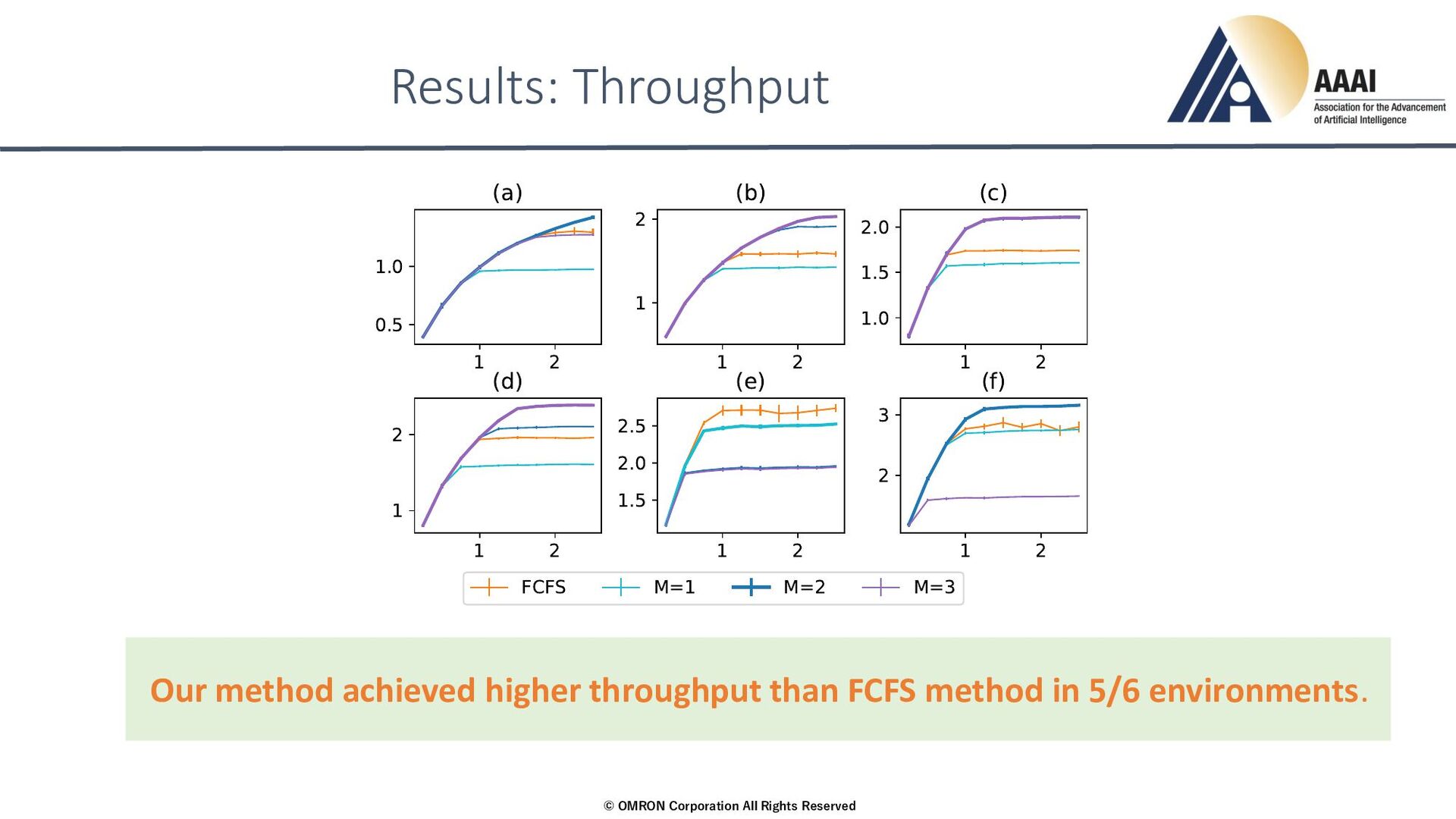
periodic MAPP • Collision-free trajectories for periodically appearing agents • Period is as small as possible • Planning for fixed cycle • A method to solve periodic MAPP • Generating an initial plan with relaxed constraints • Optimizing the plan by solving continuous optimization problem • To use a solution of periodic MAPP for online MAPP → higher throughput than the baseline
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}