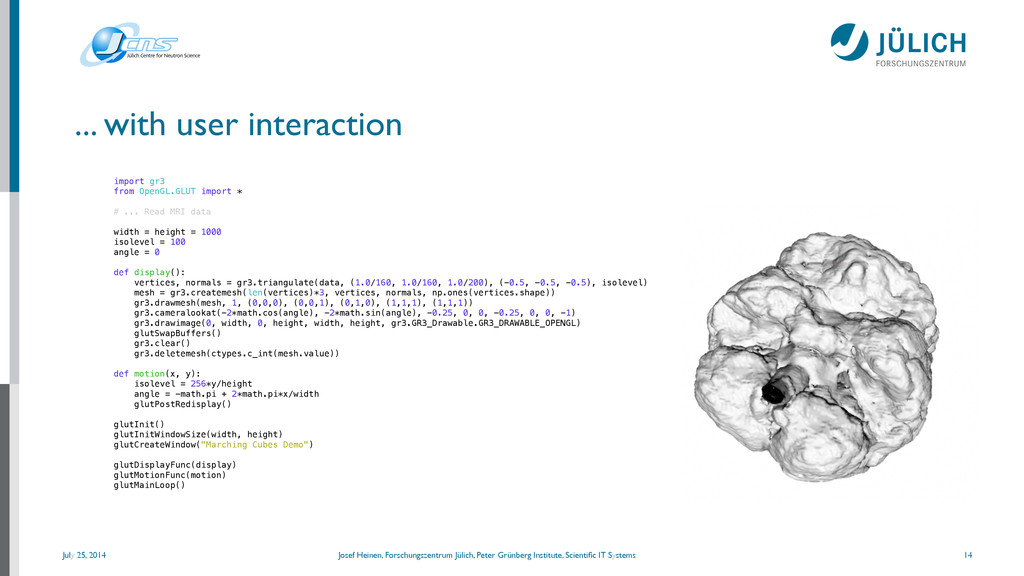
Scientific IT Systems ... with user interaction 14 import gr3 from OpenGL.GLUT import * # ... Read MRI data
width = height = 1000 isolevel = 100 angle = 0 ! def display(): vertices, normals = gr3.triangulate(data, (1.0/160, 1.0/160, 1.0/200), (-0.5, -0.5, -0.5), isolevel) mesh = gr3.createmesh(len(vertices)*3, vertices, normals, np.ones(vertices.shape)) gr3.drawmesh(mesh, 1, (0,0,0), (0,0,1), (0,1,0), (1,1,1), (1,1,1)) gr3.cameralookat(-2*math.cos(angle), -2*math.sin(angle), -0.25, 0, 0, -0.25, 0, 0, -1) gr3.drawimage(0, width, 0, height, width, height, gr3.GR3_Drawable.GR3_DRAWABLE_OPENGL) glutSwapBuffers() gr3.clear() gr3.deletemesh(ctypes.c_int(mesh.value)) def motion(x, y): isolevel = 256*y/height angle = -math.pi + 2*math.pi*x/width glutPostRedisplay() glutInit() glutInitWindowSize(width, height) glutCreateWindow("Marching Cubes Demo") ! glutDisplayFunc(display) glutMotionFunc(motion) glutMainLoop()
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}