Mapping and Semantic Search Brandon Trabucco1, Gunnar Sigurdsson2, Robinson Piramuthu2, Gaurav S. Sukhatme2,3, Ruslan Salakhutdinov1 (1Carnegie Mellon University, 2Amazon Alexa AI, 3University of Southern California) Winner of the Rearrangement Challenge at CVPR 2022 Brandon Trabucco, Gunnar Sigurdsson, Robinson Piramuthu, Gaurav S. Sukhatme, and Ruslan Salakhutdinov. "A Simple Approach for Visual Rearrangement: 3D Mapping and Semantic Search." Winner of the Rearrangement Challenge at CVPR 2022.
{kind=link}
{kind=link}
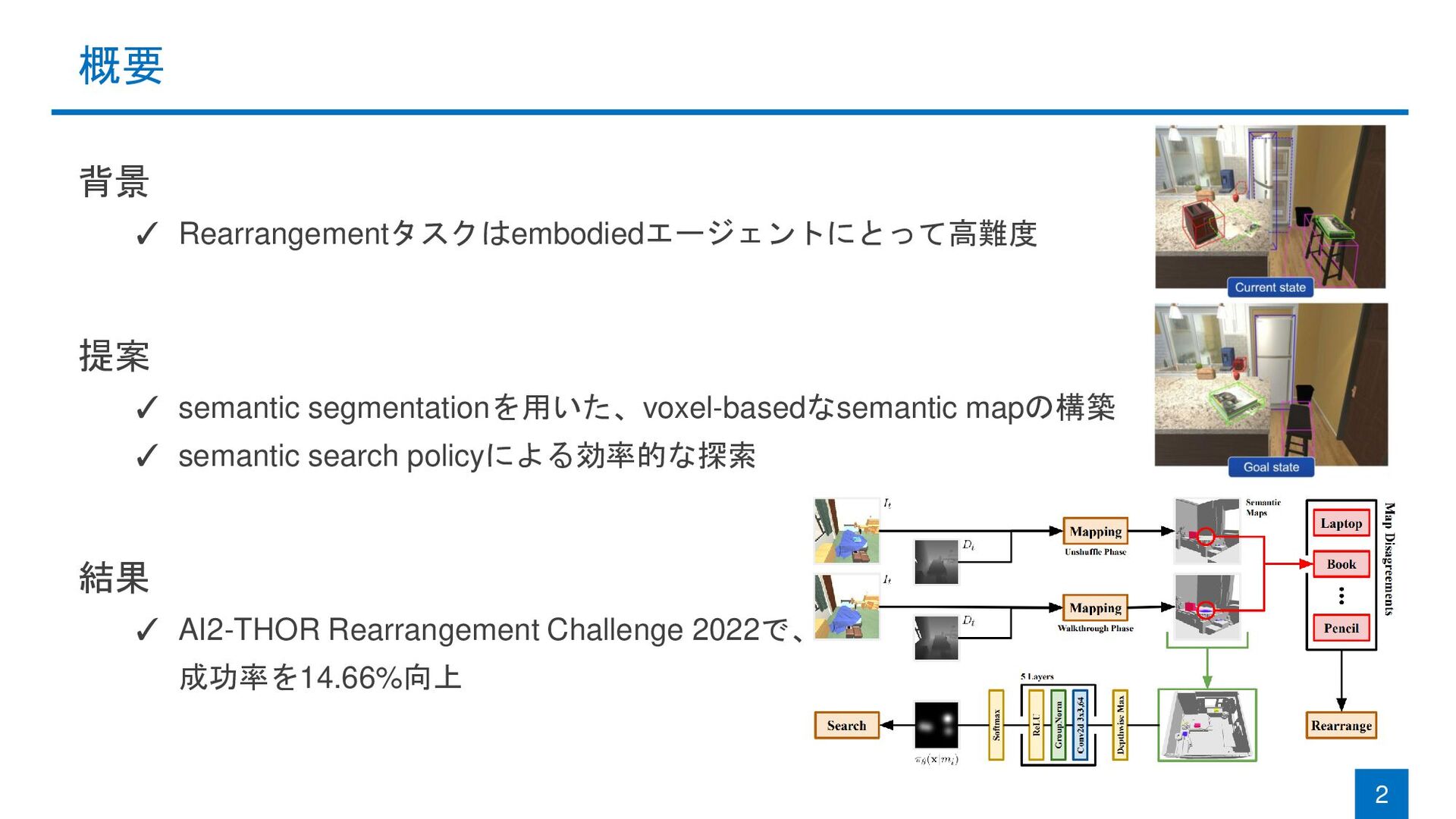
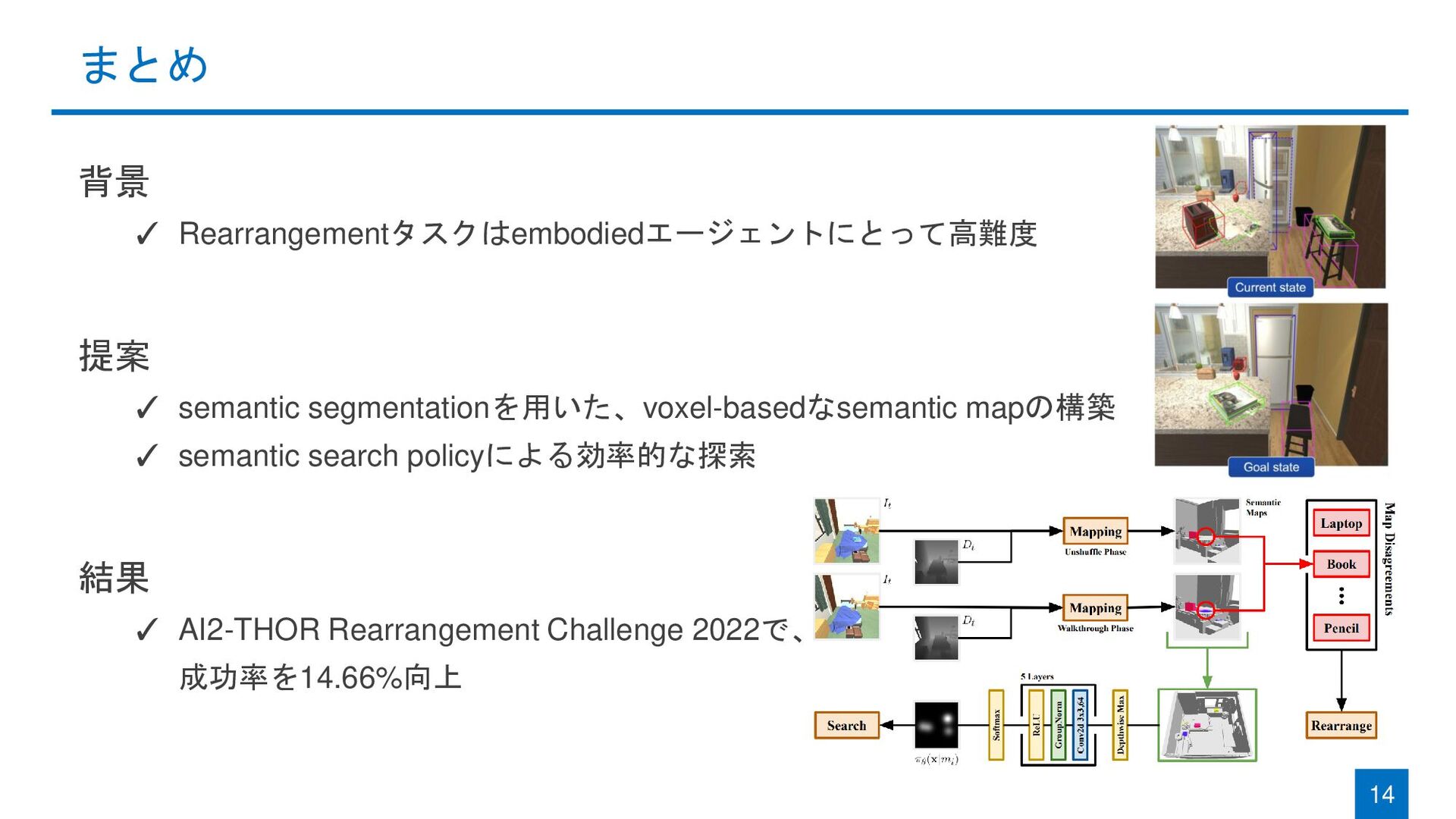
![背景:物体を初期状態に戻すEmbodied AIタスクは高難度 ◼ AI2-THOR Rearrangement Challenge 2022 [Weihs+, CVPR21] ◼](https://files.speakerdeck.com/presentations/c2b65330a2124a5eacc8930016fed7f5/slide_2.jpg){kind=link}
![関連研究:性能に改善の余地 4 Model Detail Visual Room Rearrangement (VRR) [Weihs+, CVPR21]](https://files.speakerdeck.com/presentations/c2b65330a2124a5eacc8930016fed7f5/slide_3.jpg){kind=link}
{kind=link}
{kind=link}
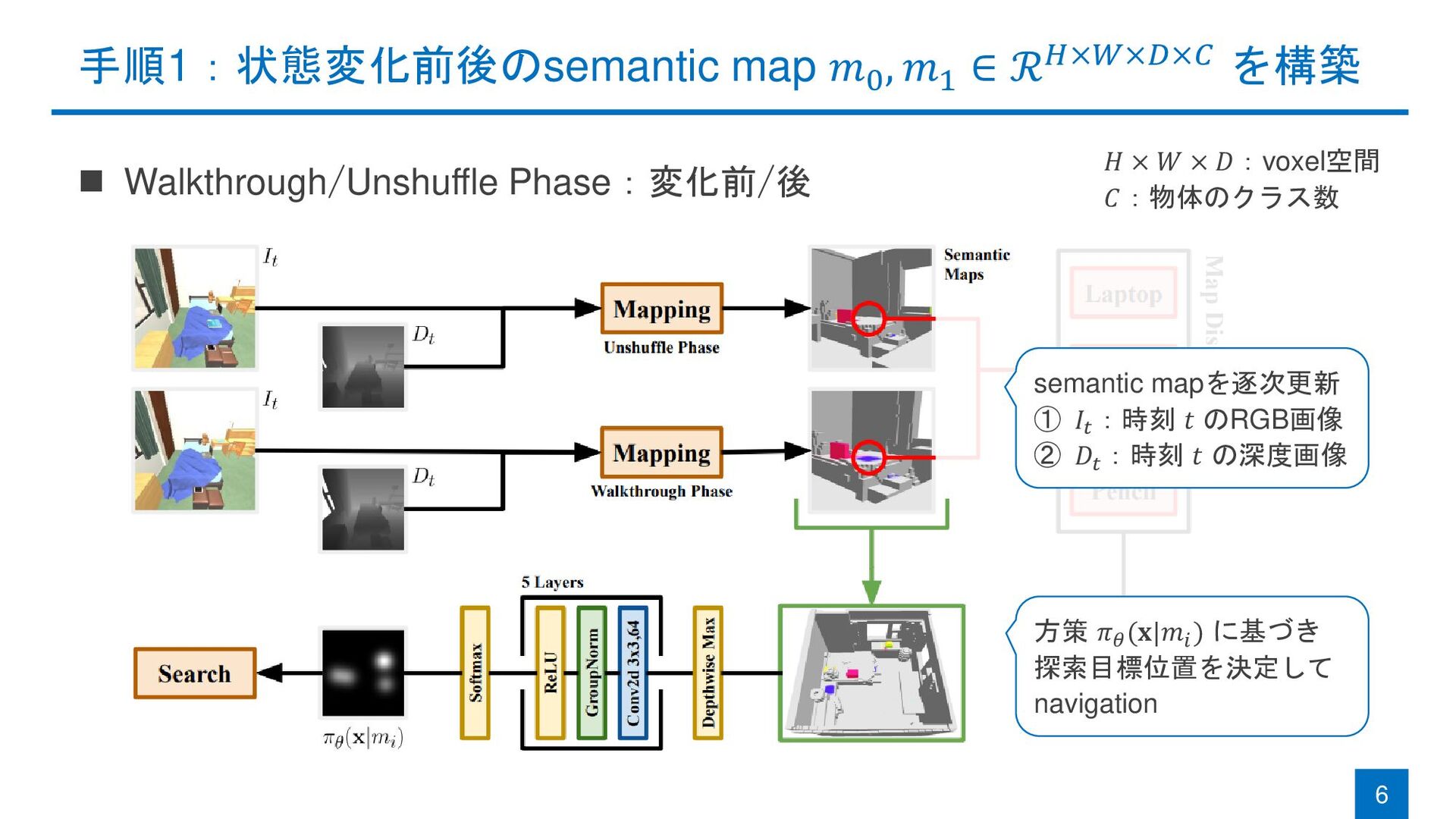
![semantic mapの構築方法:semantic segmentationの結果を反映 ◼ Mask R-CNN [He+, ICCV17] の信頼度0.9未満を除外 ◼](https://files.speakerdeck.com/presentations/c2b65330a2124a5eacc8930016fed7f5/slide_6.jpg){kind=link}
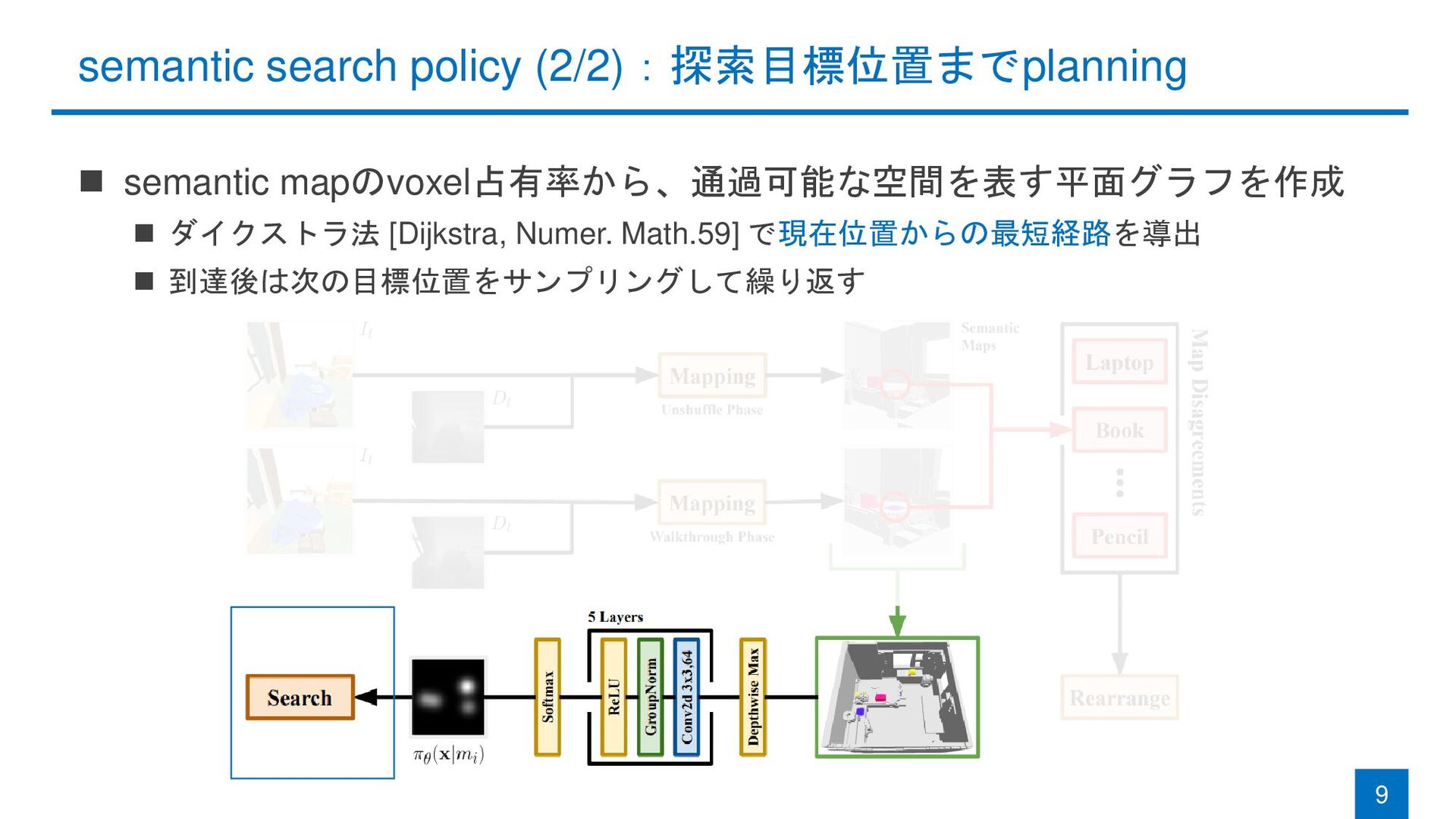
![semantic search policy (1/2):物体が存在する可能性の高い場所へnavigation ◼ FILM [Min+, ICLR22] に倣い混合ガウス分布 𝑝∗(𝐱)](https://files.speakerdeck.com/presentations/c2b65330a2124a5eacc8930016fed7f5/slide_7.jpg){kind=link}
{kind=link}
{kind=link}
![実験設定:AI2-THOR Rearrangement Challenge 2022 [Weihs+, CVPR21] ◼ RoomRデータセット ◼ 最大5物体がrearrangement対象](https://files.speakerdeck.com/presentations/c2b65330a2124a5eacc8930016fed7f5/slide_10.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}