2021/01/28
人工知能学会 第115回人工知能基本問題研究会(SIG-FPAI) 招待講演
https://sig-fpai.org/past/fpai115.html
タイトル:
整数計画法に基づく説明可能な機械学習へのアプローチ
概要:
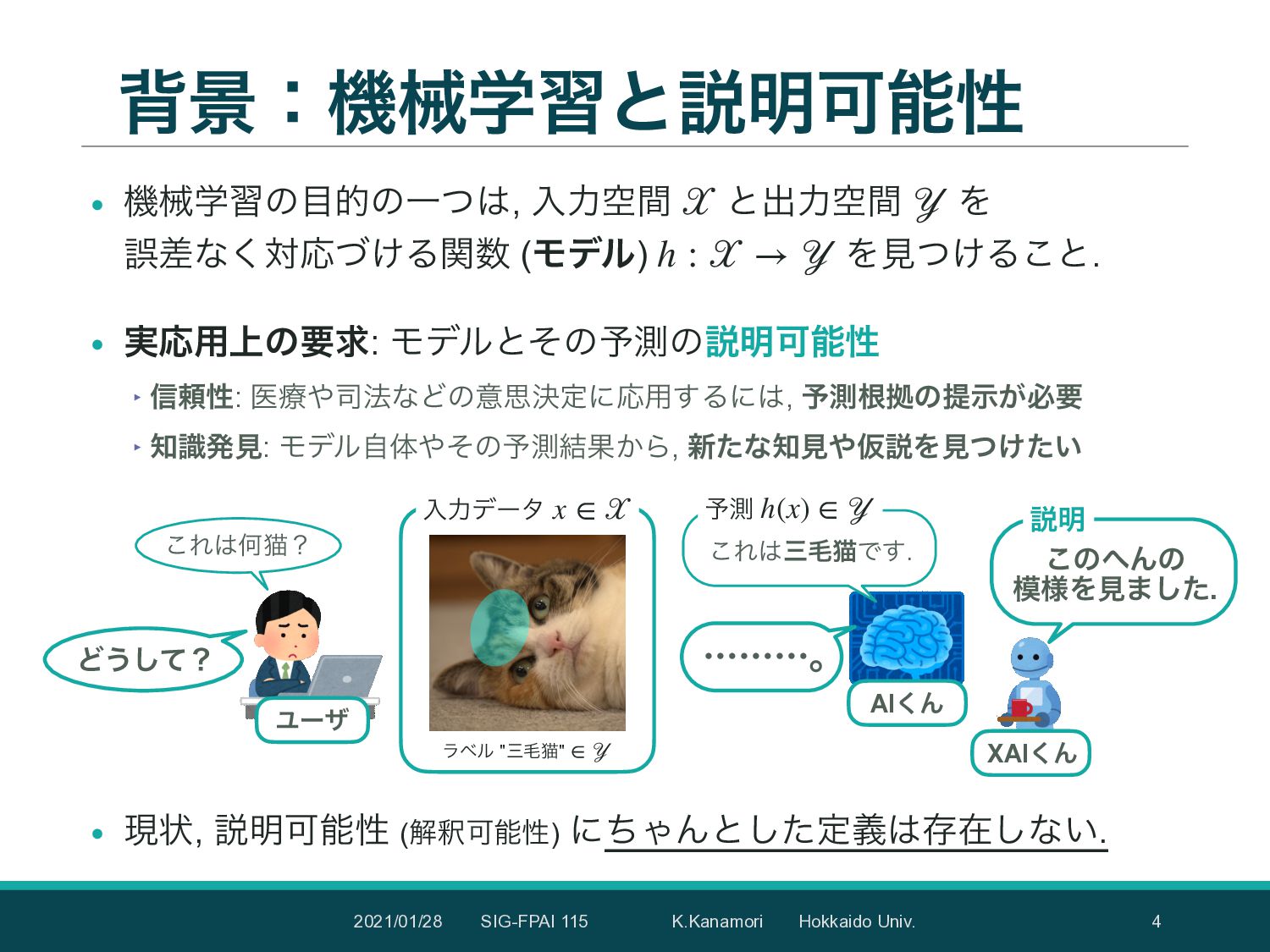
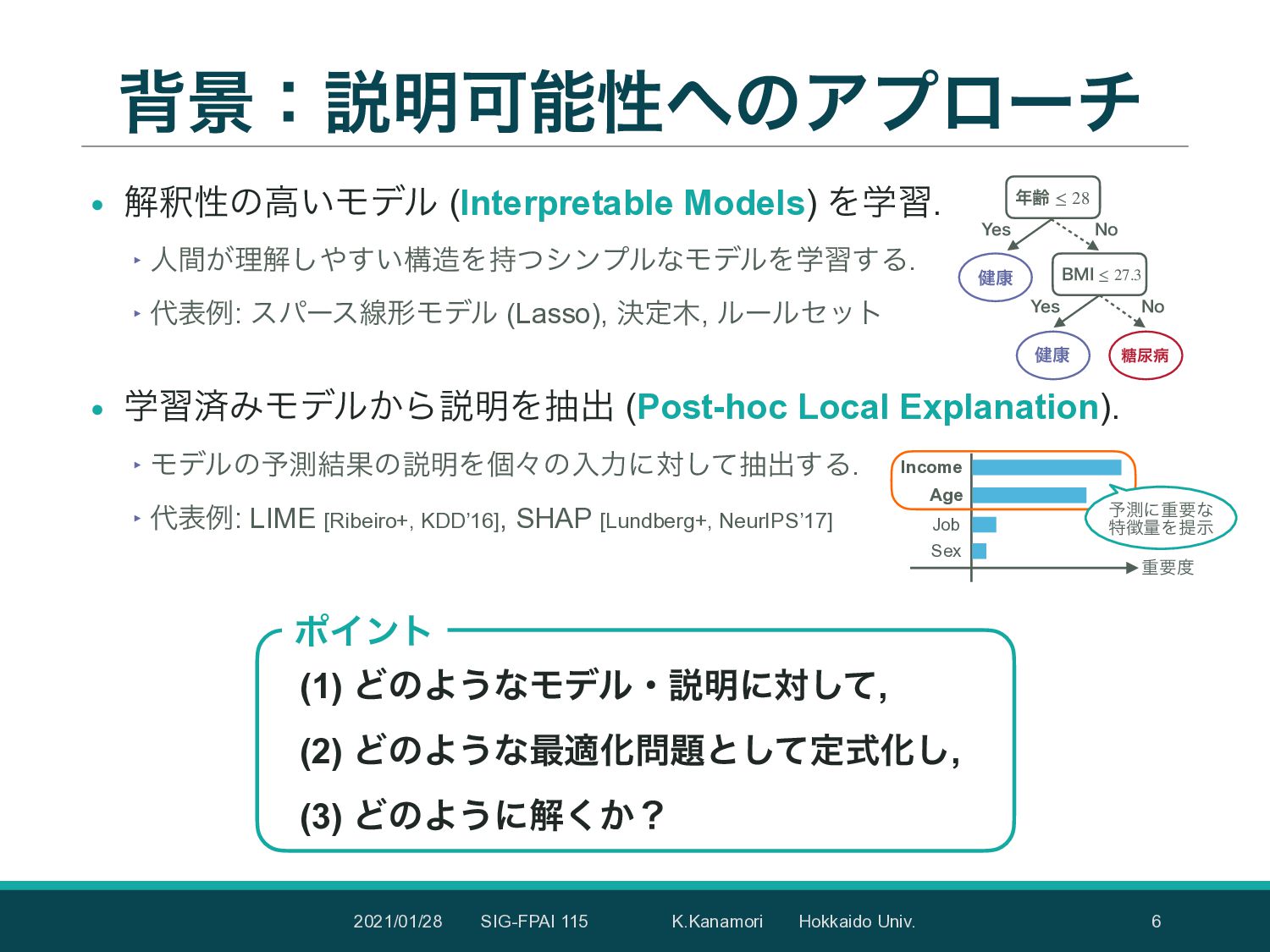
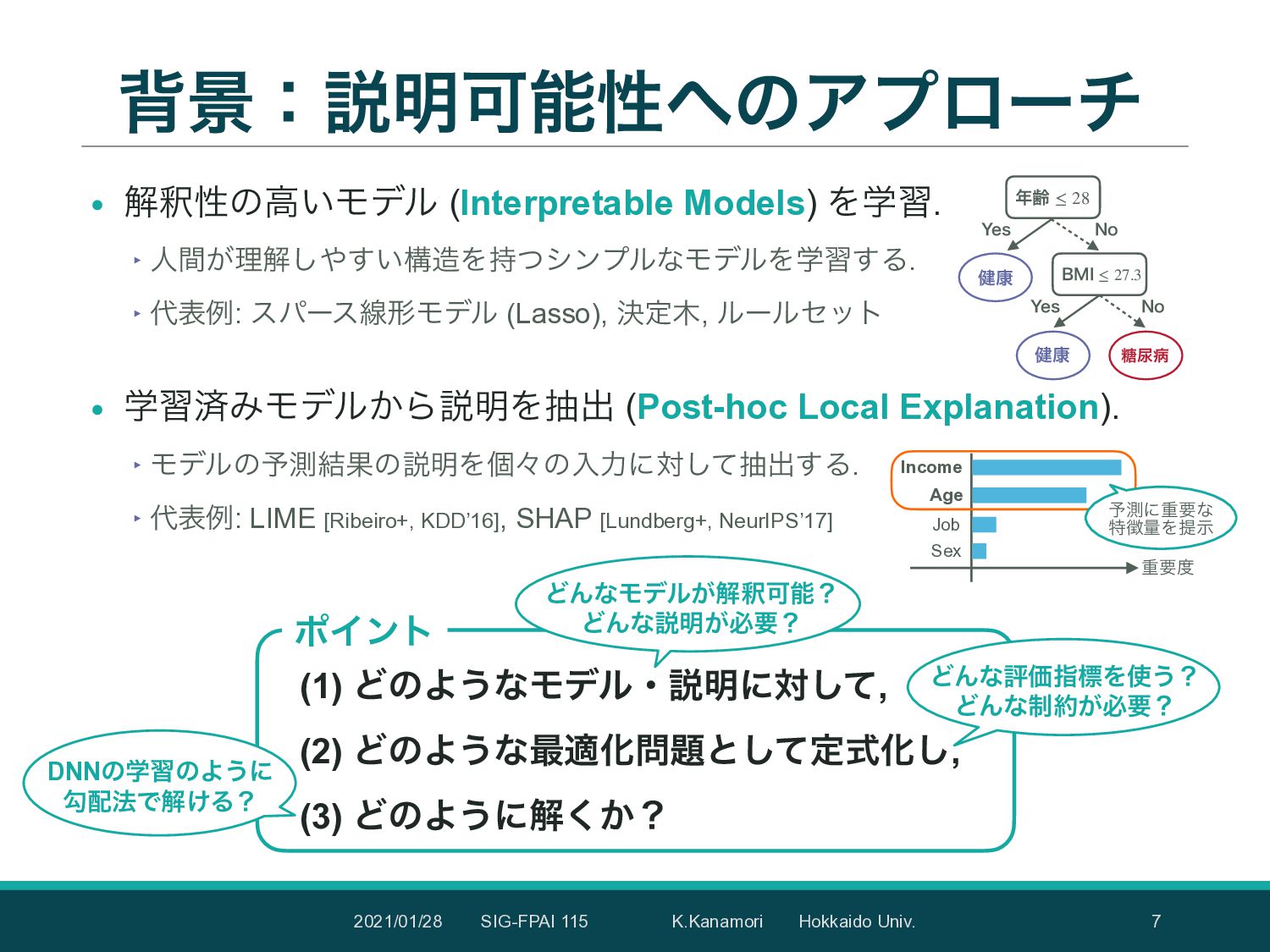
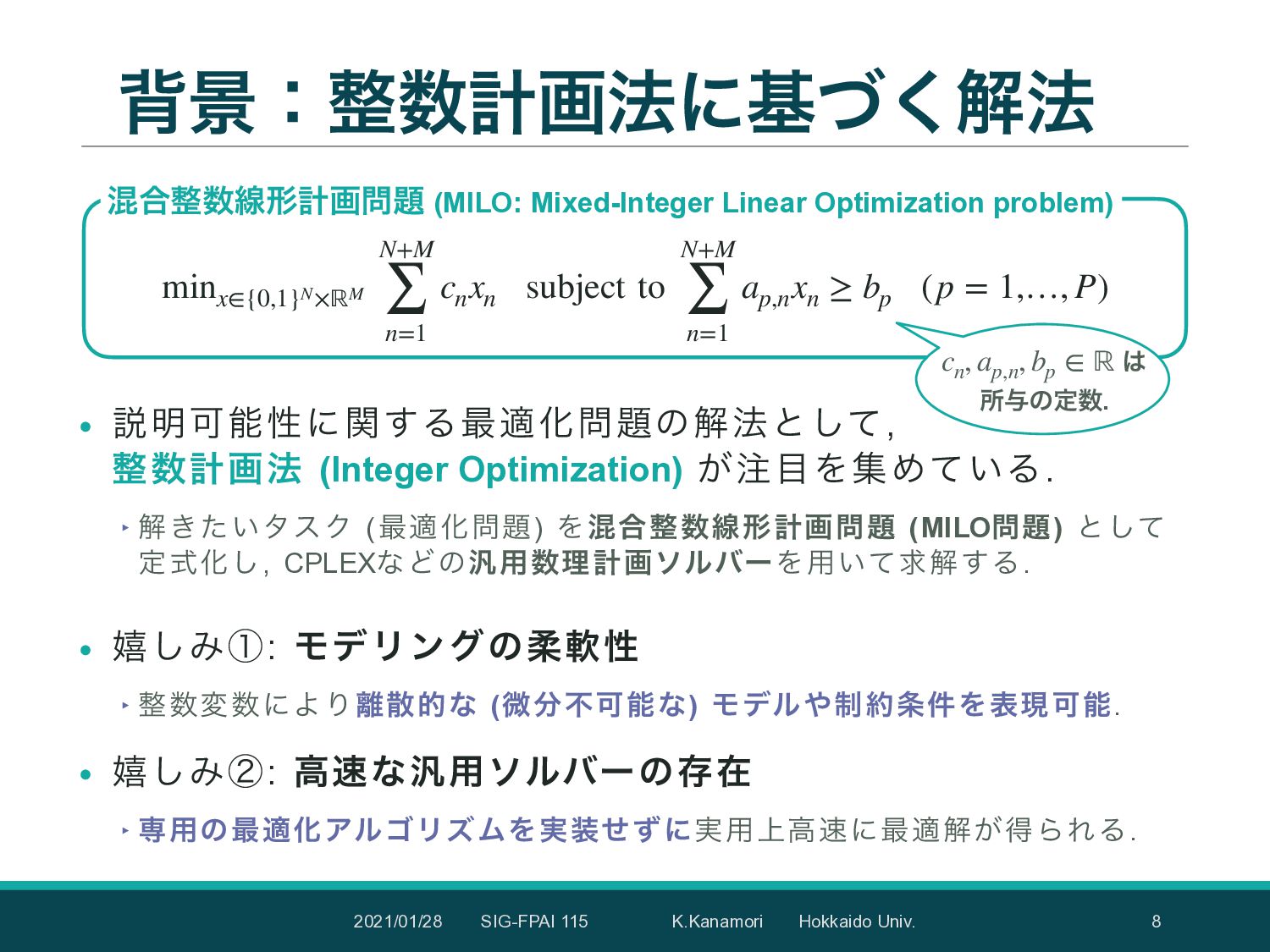
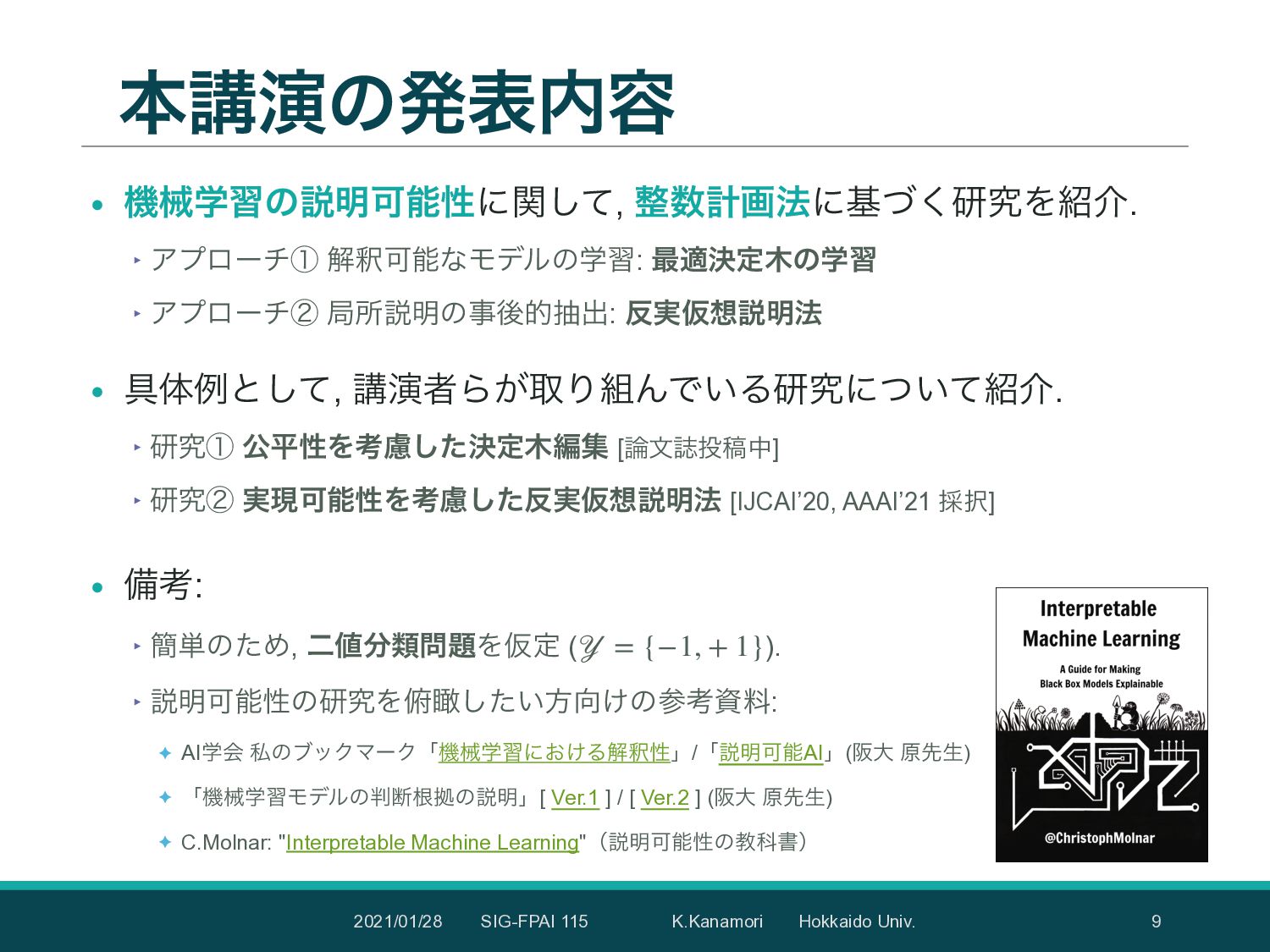
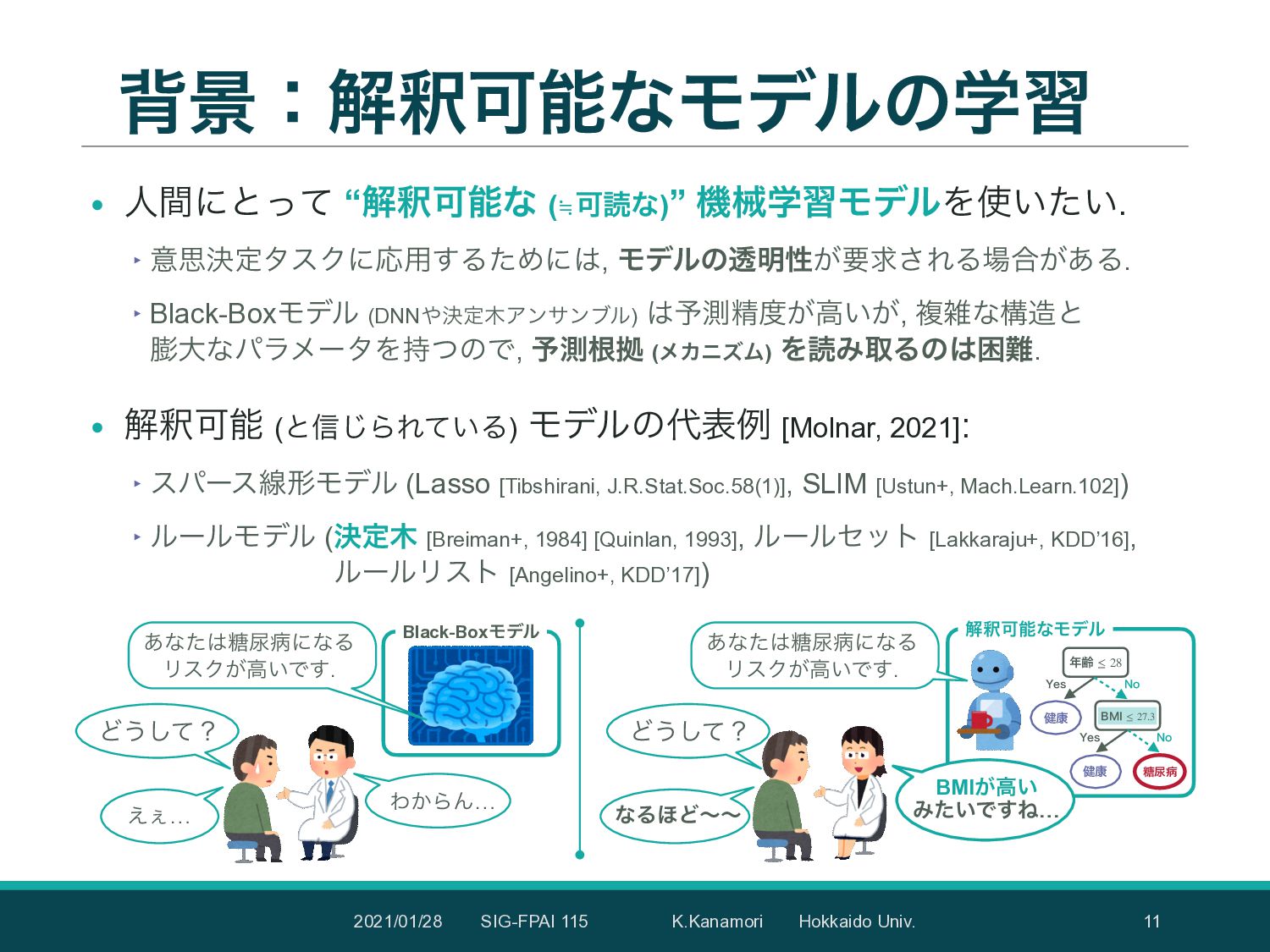
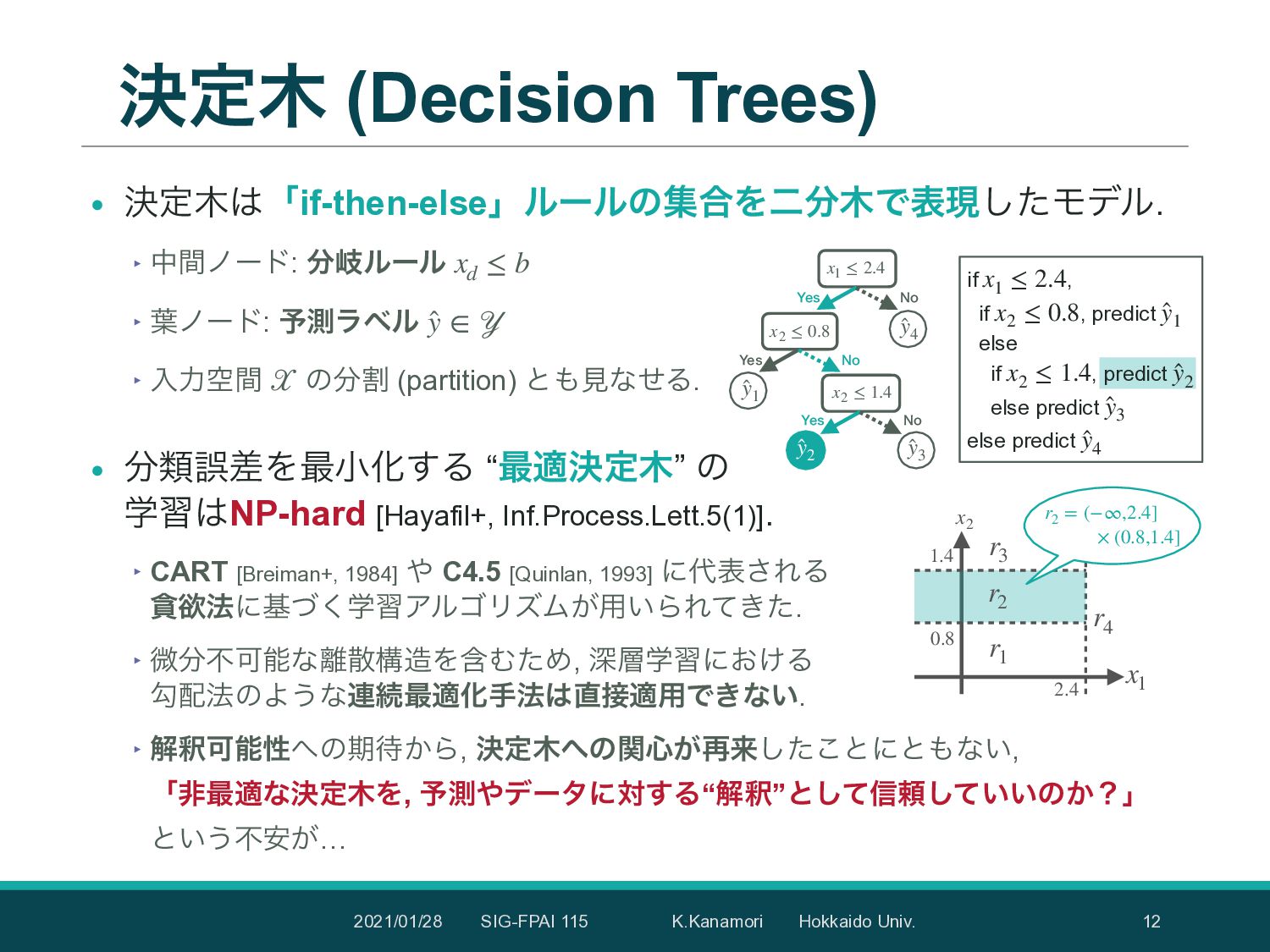
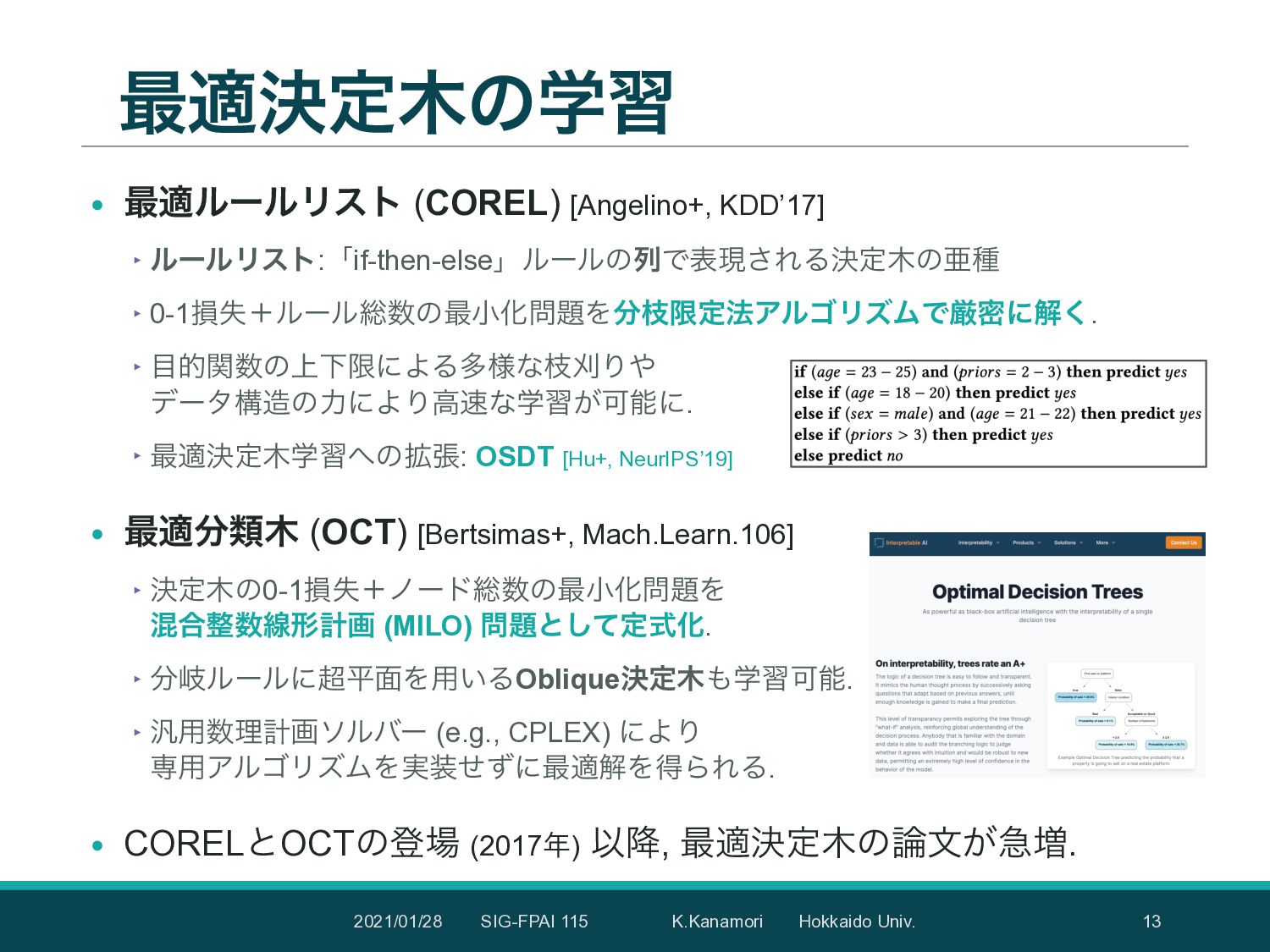
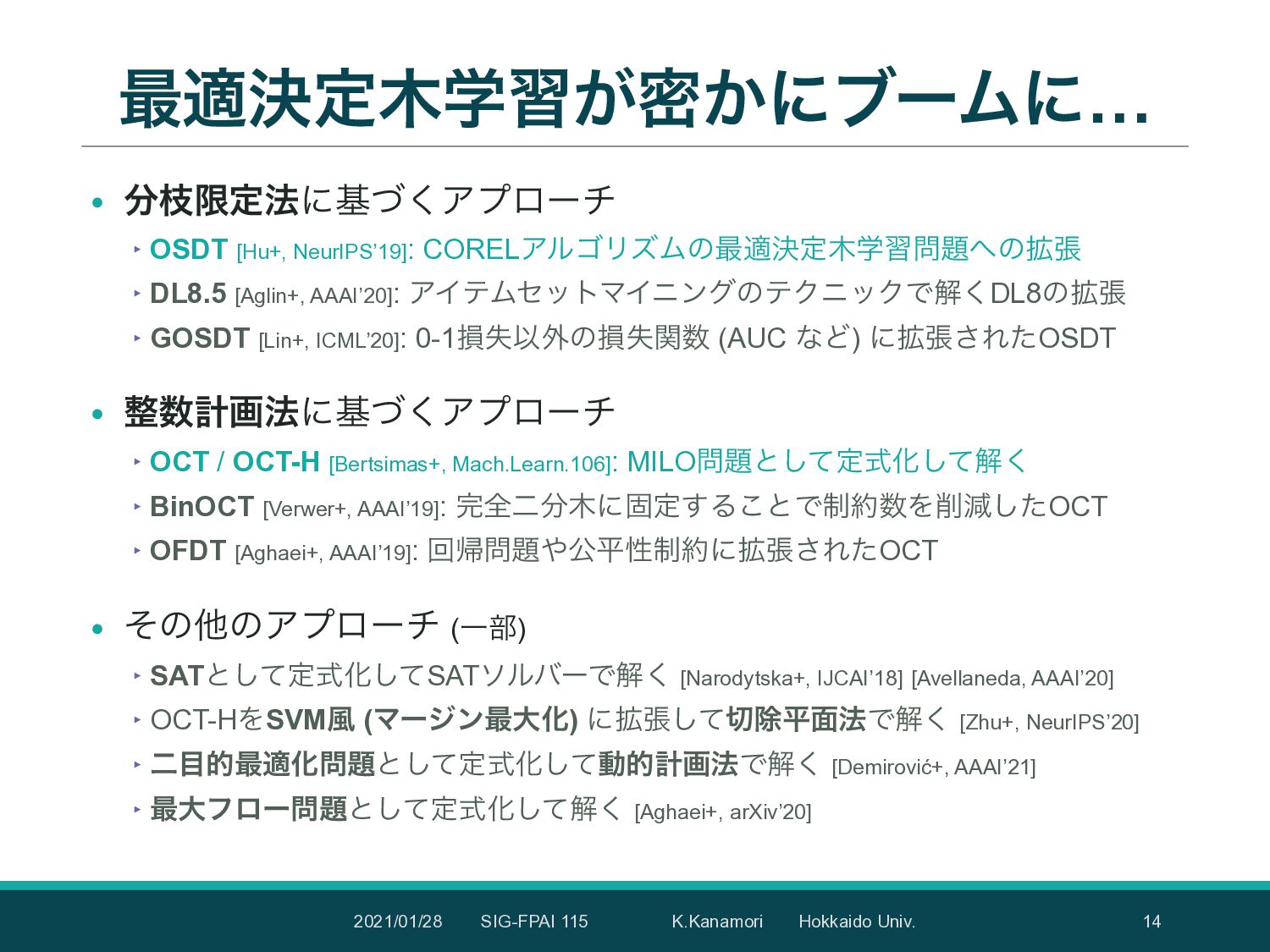
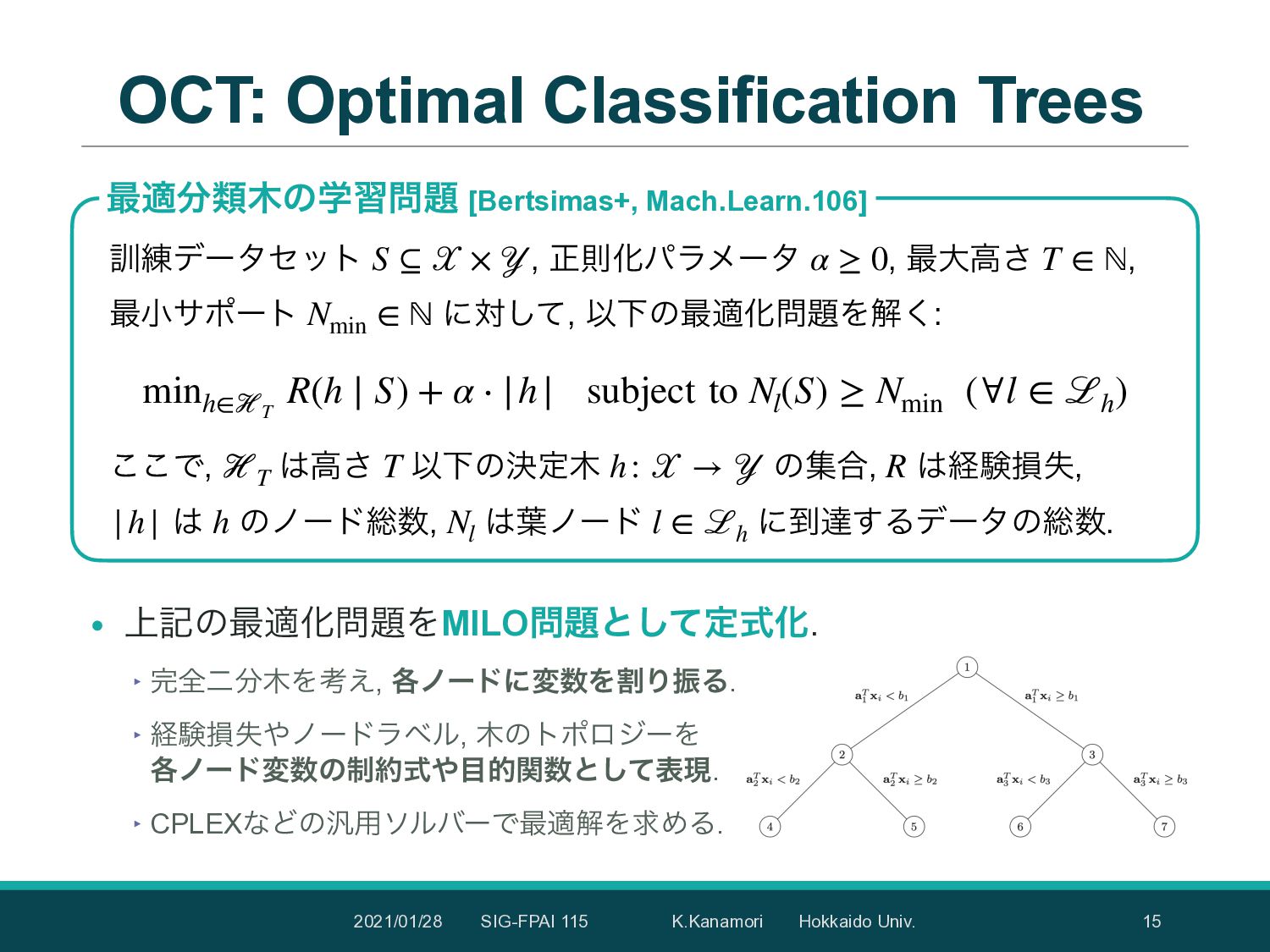
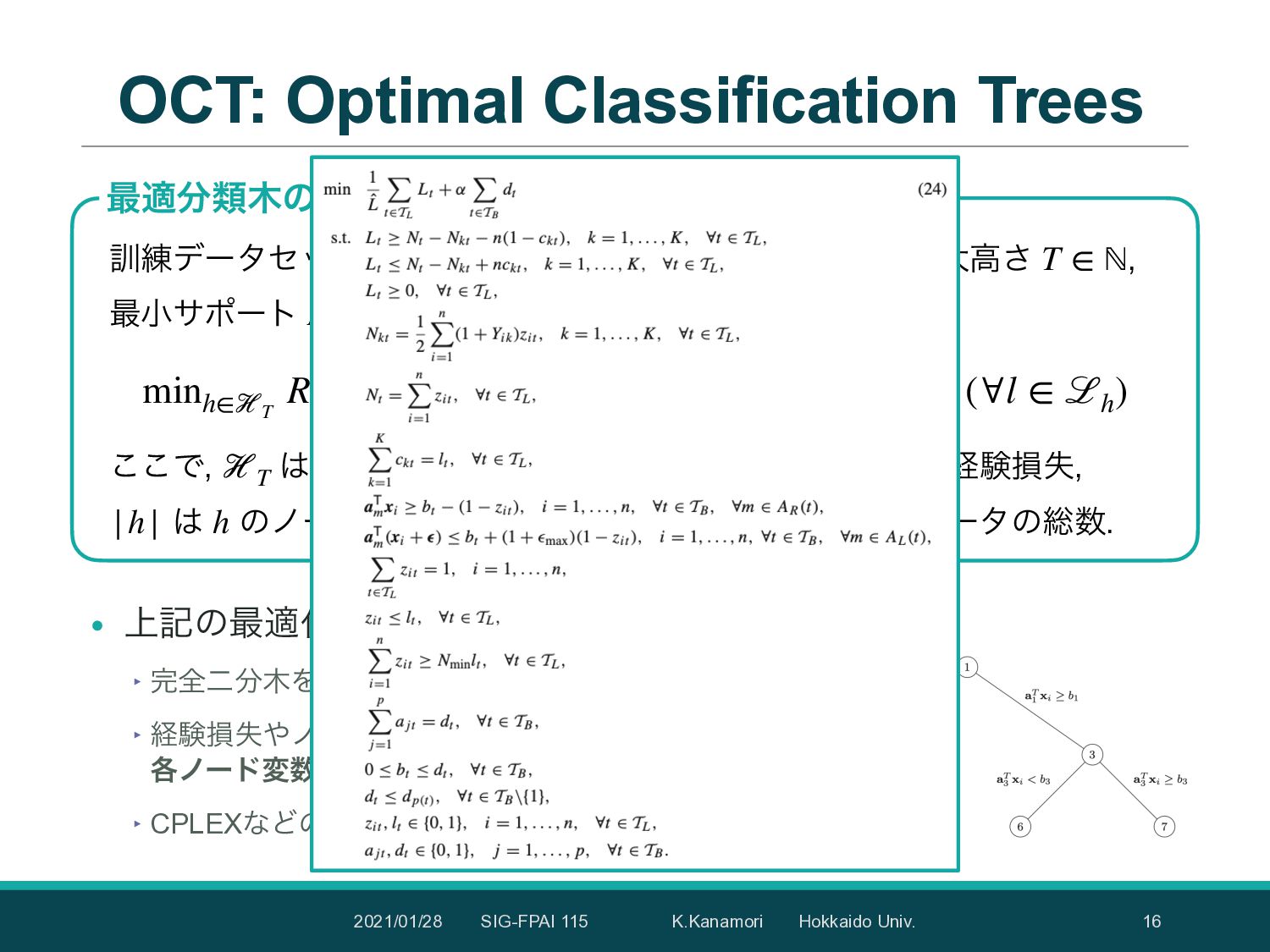
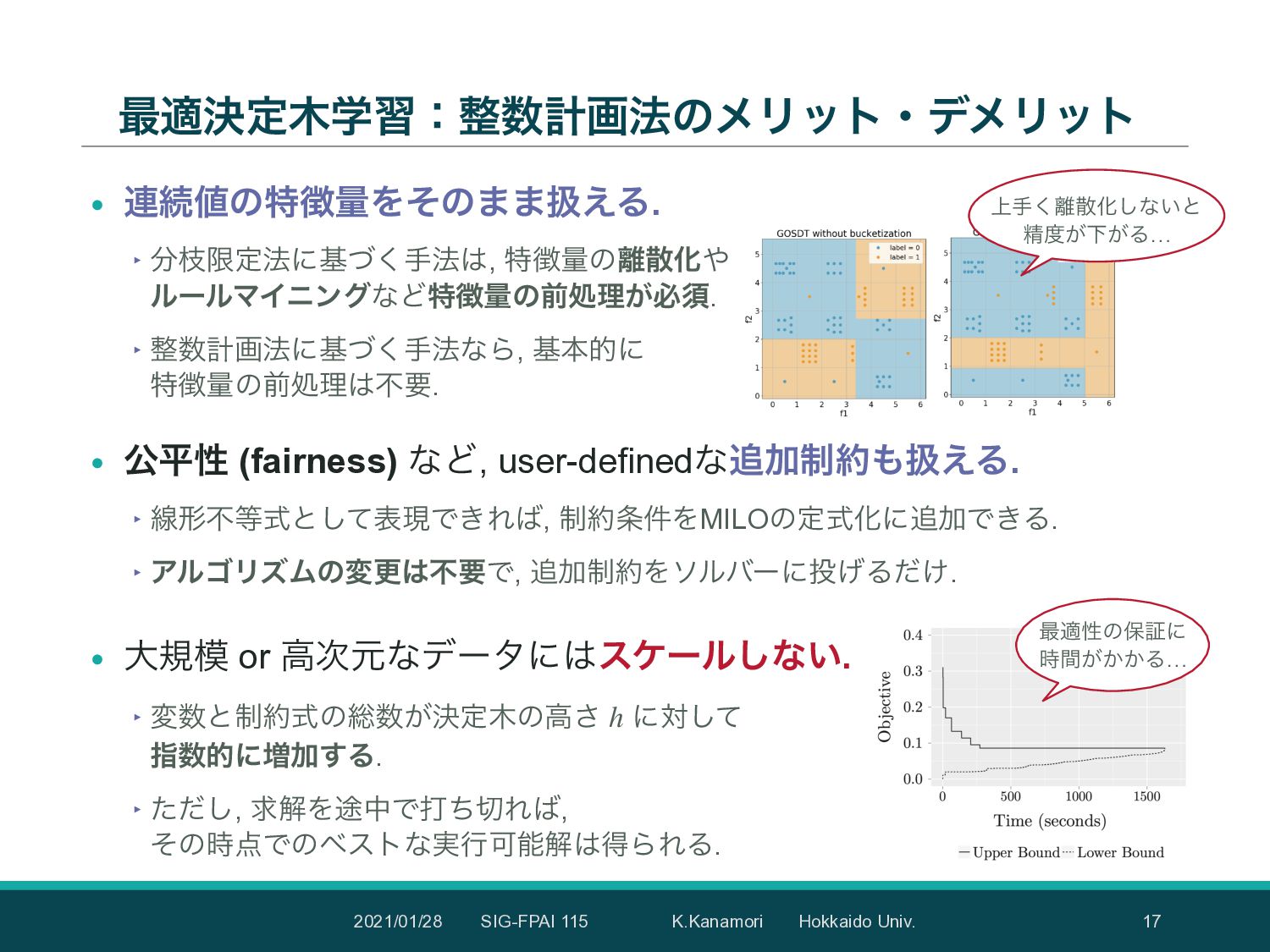
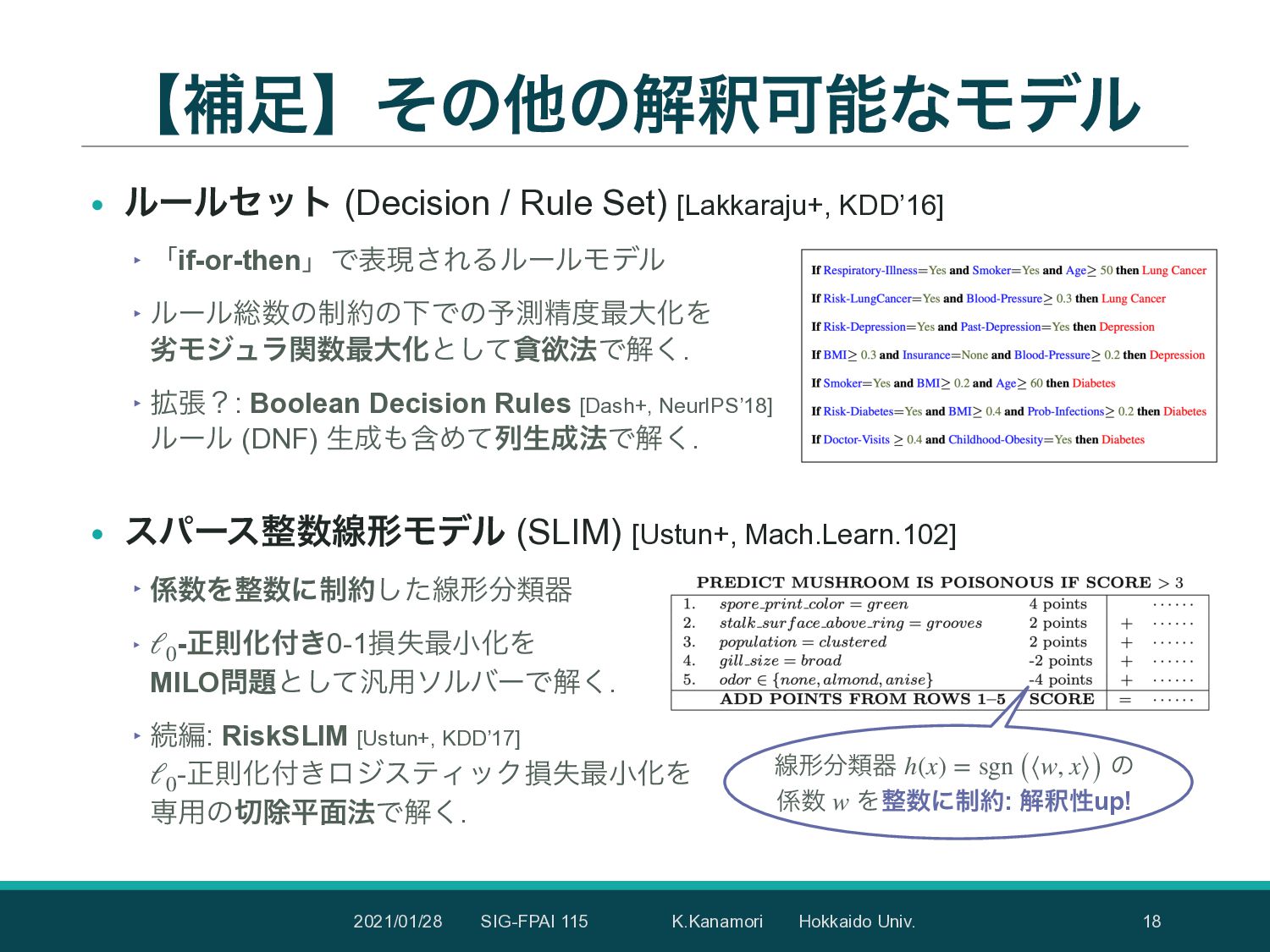
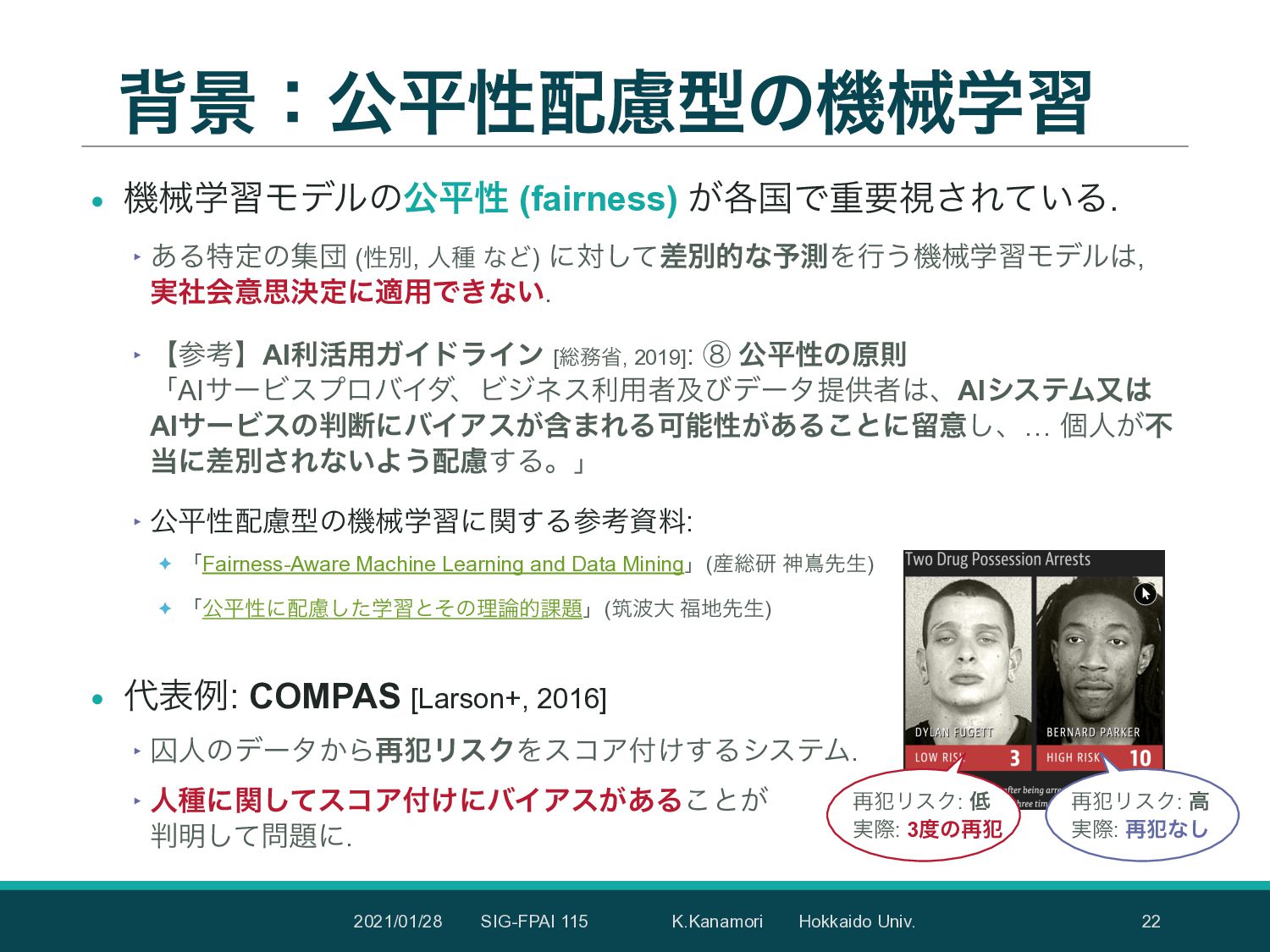
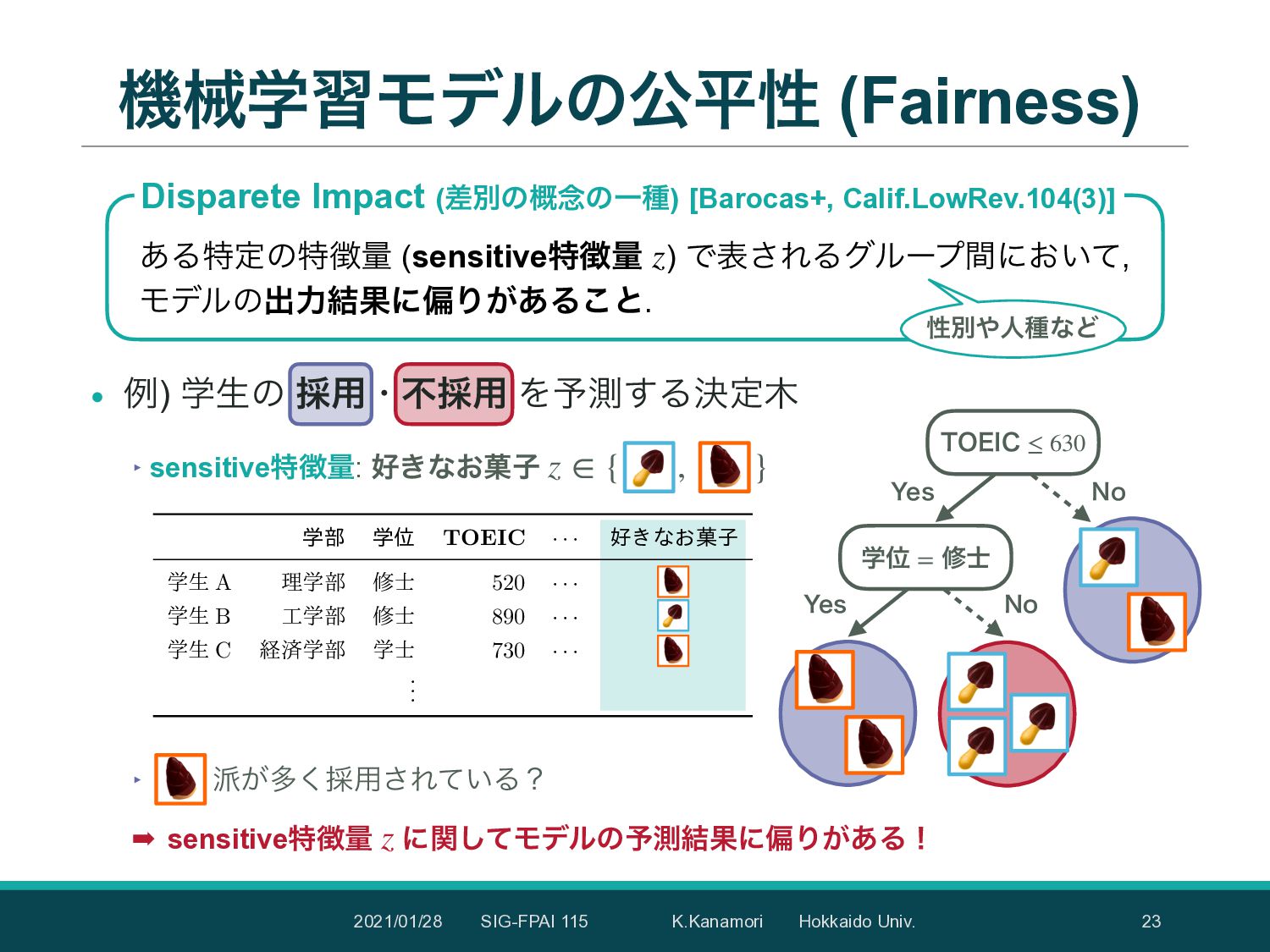
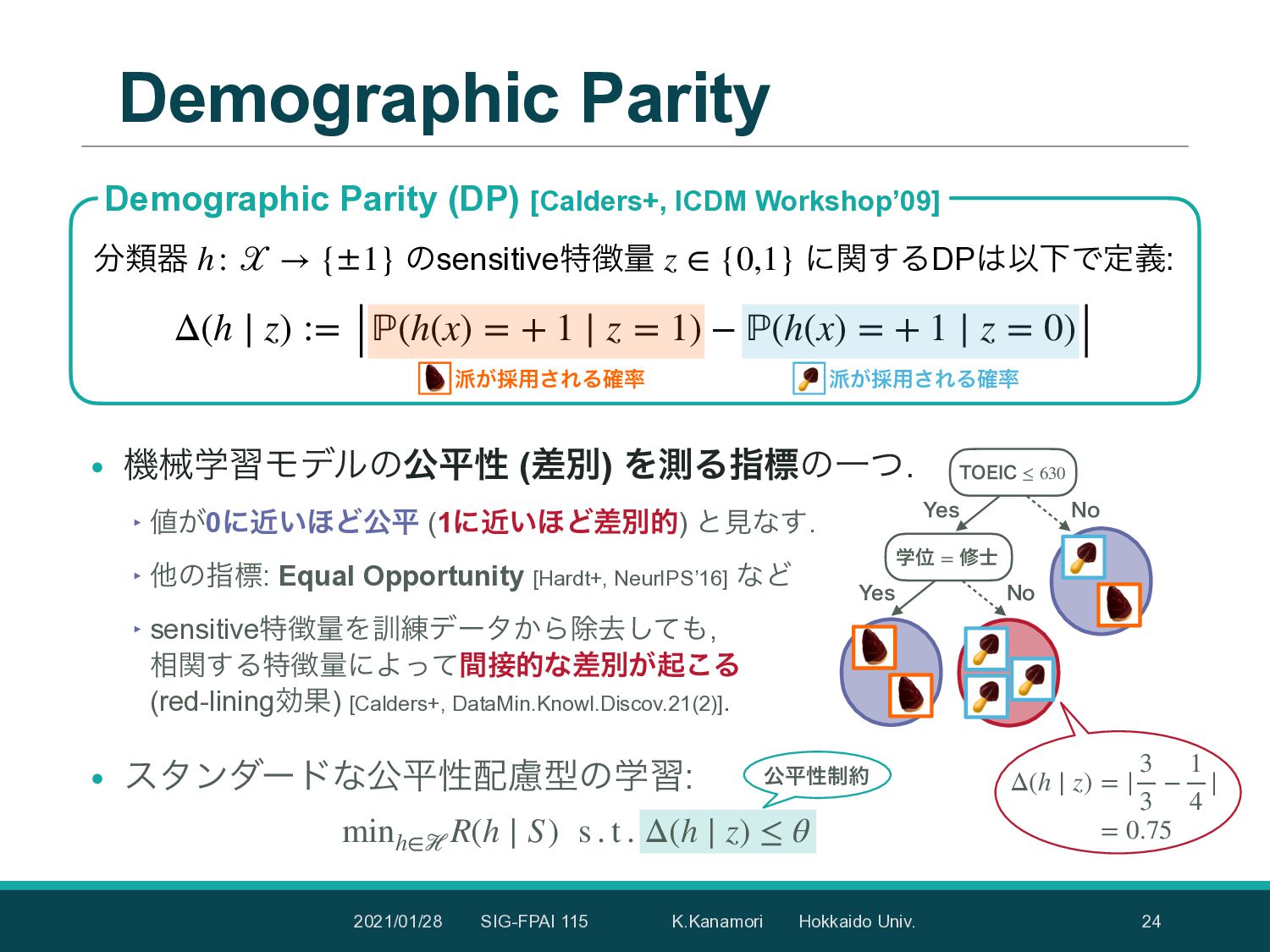
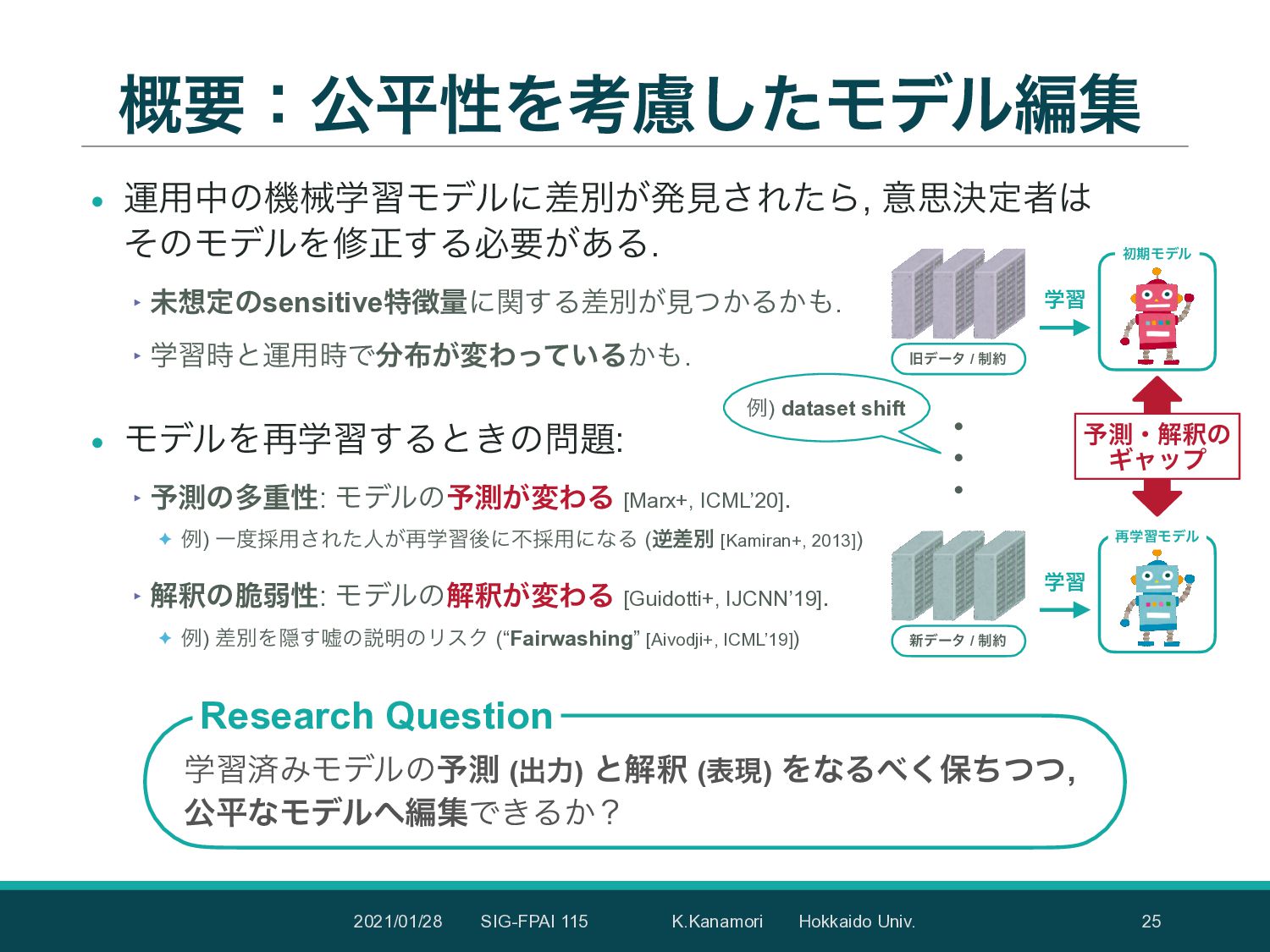
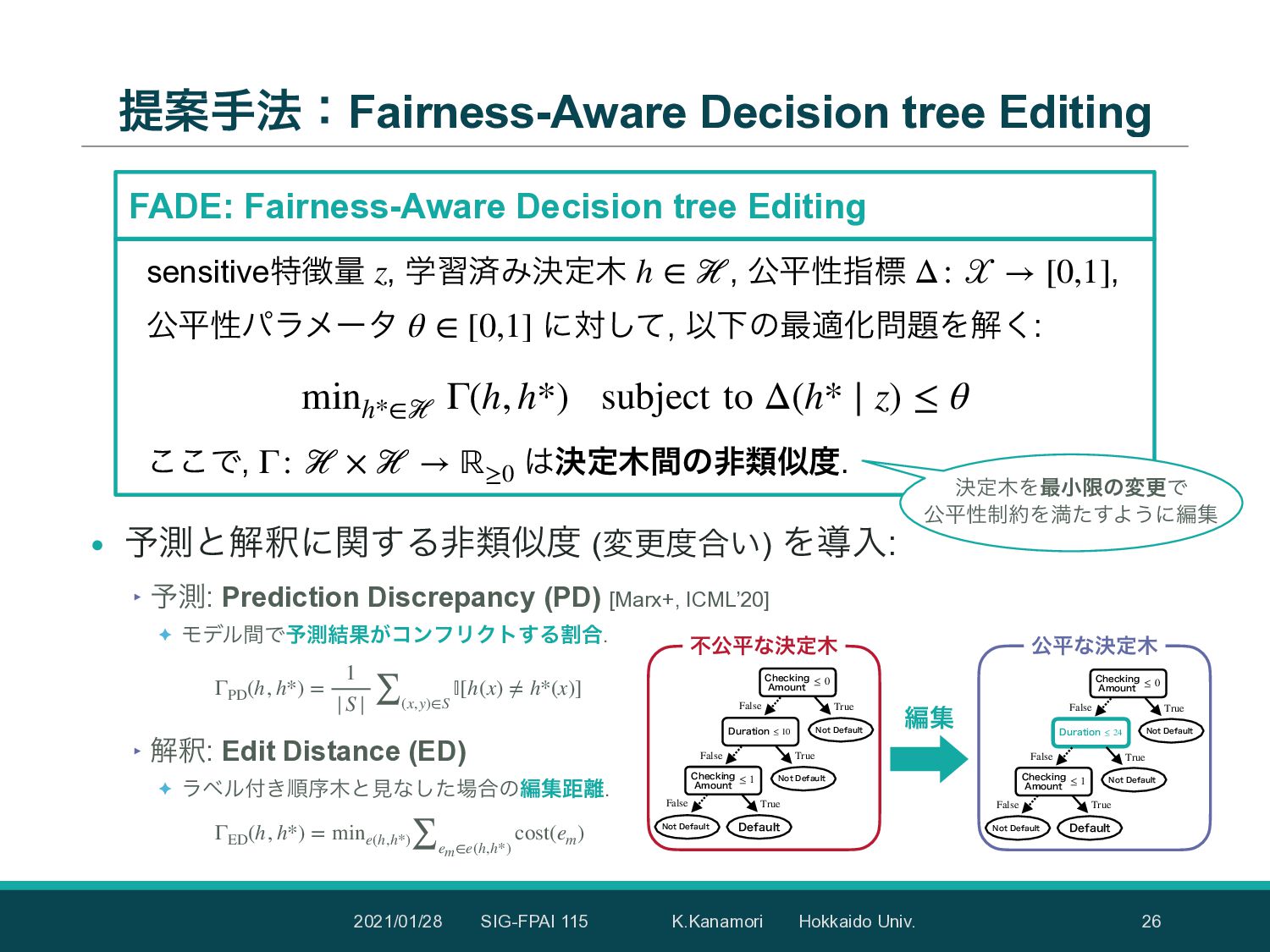
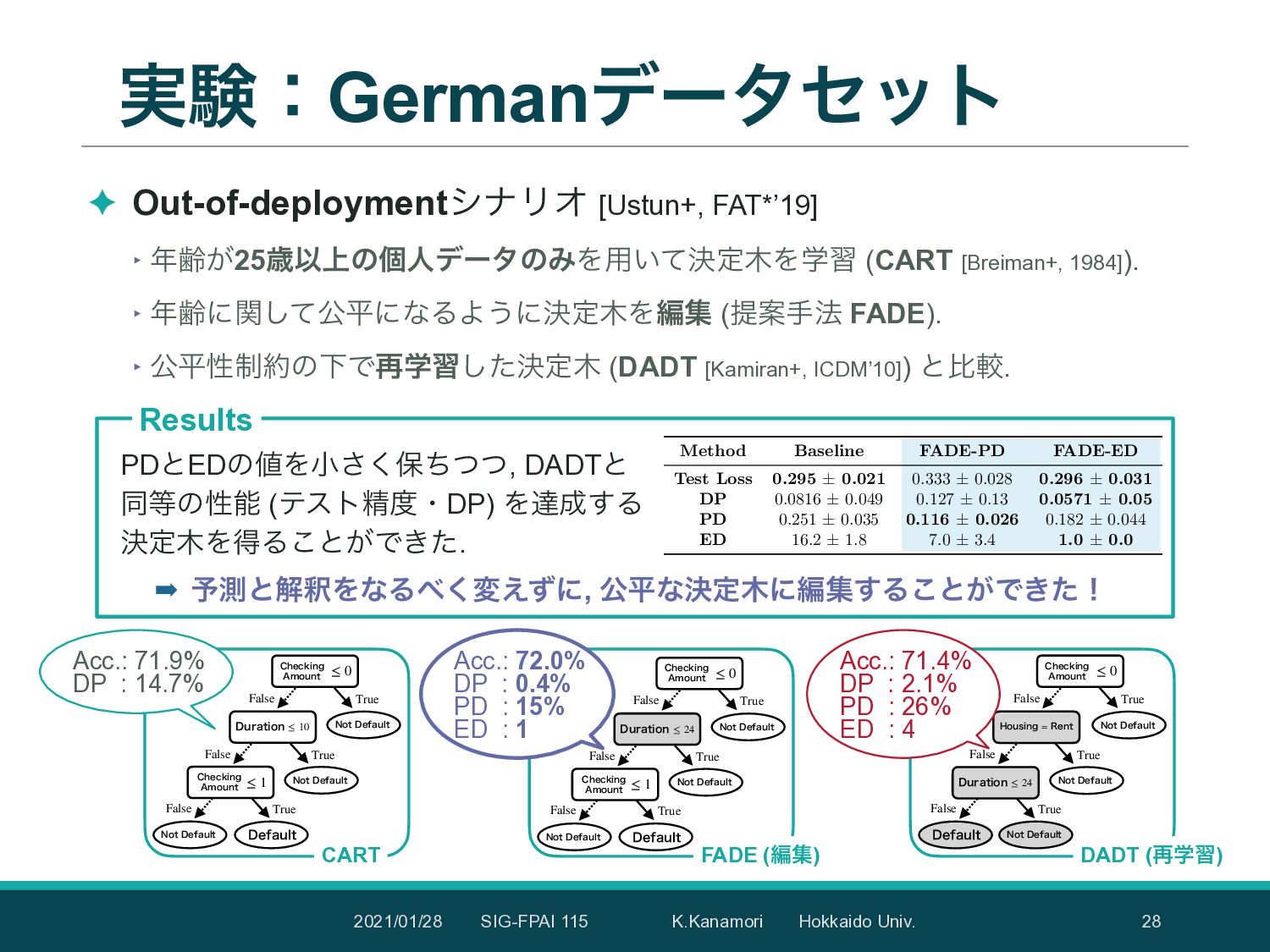
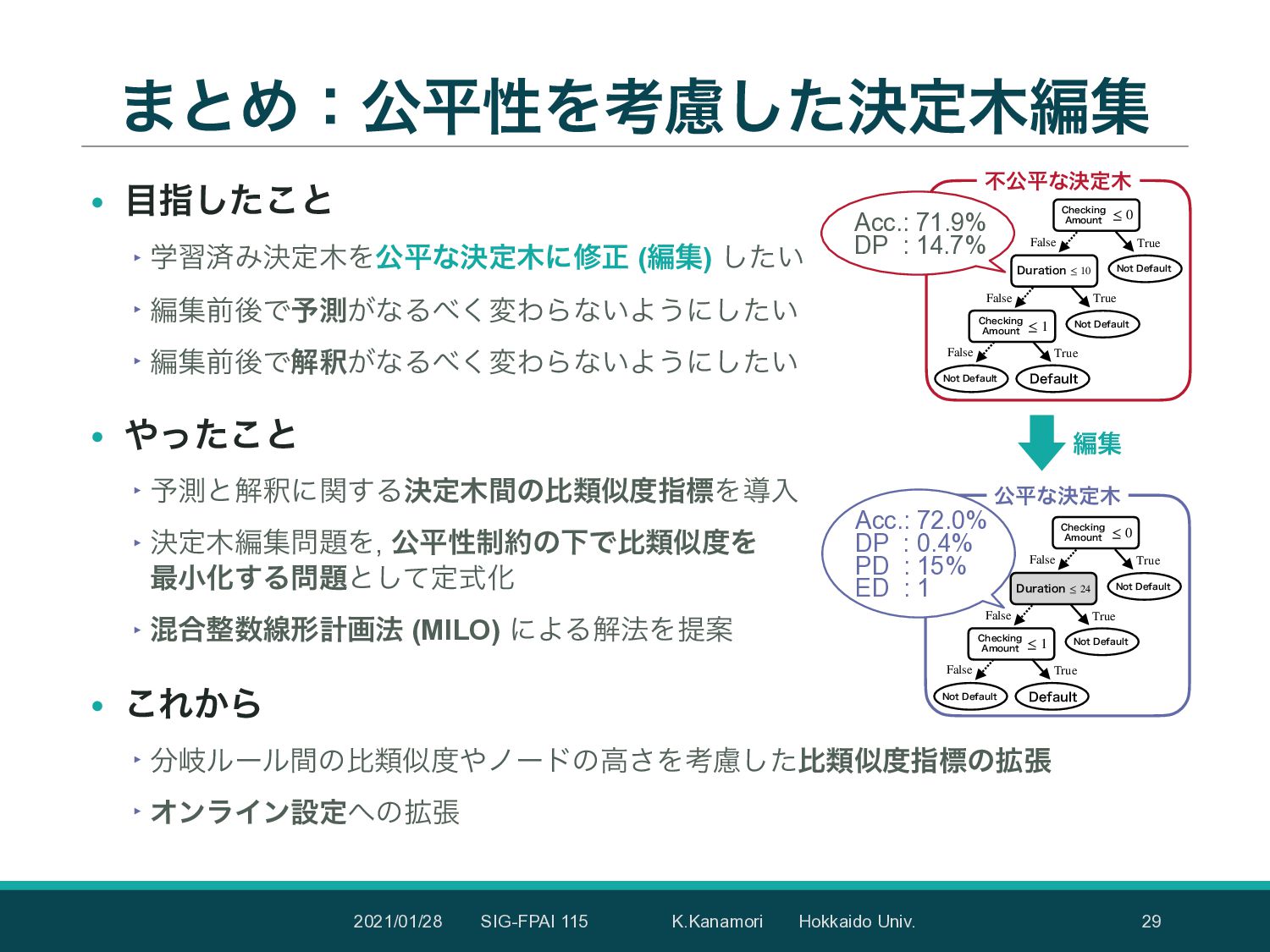
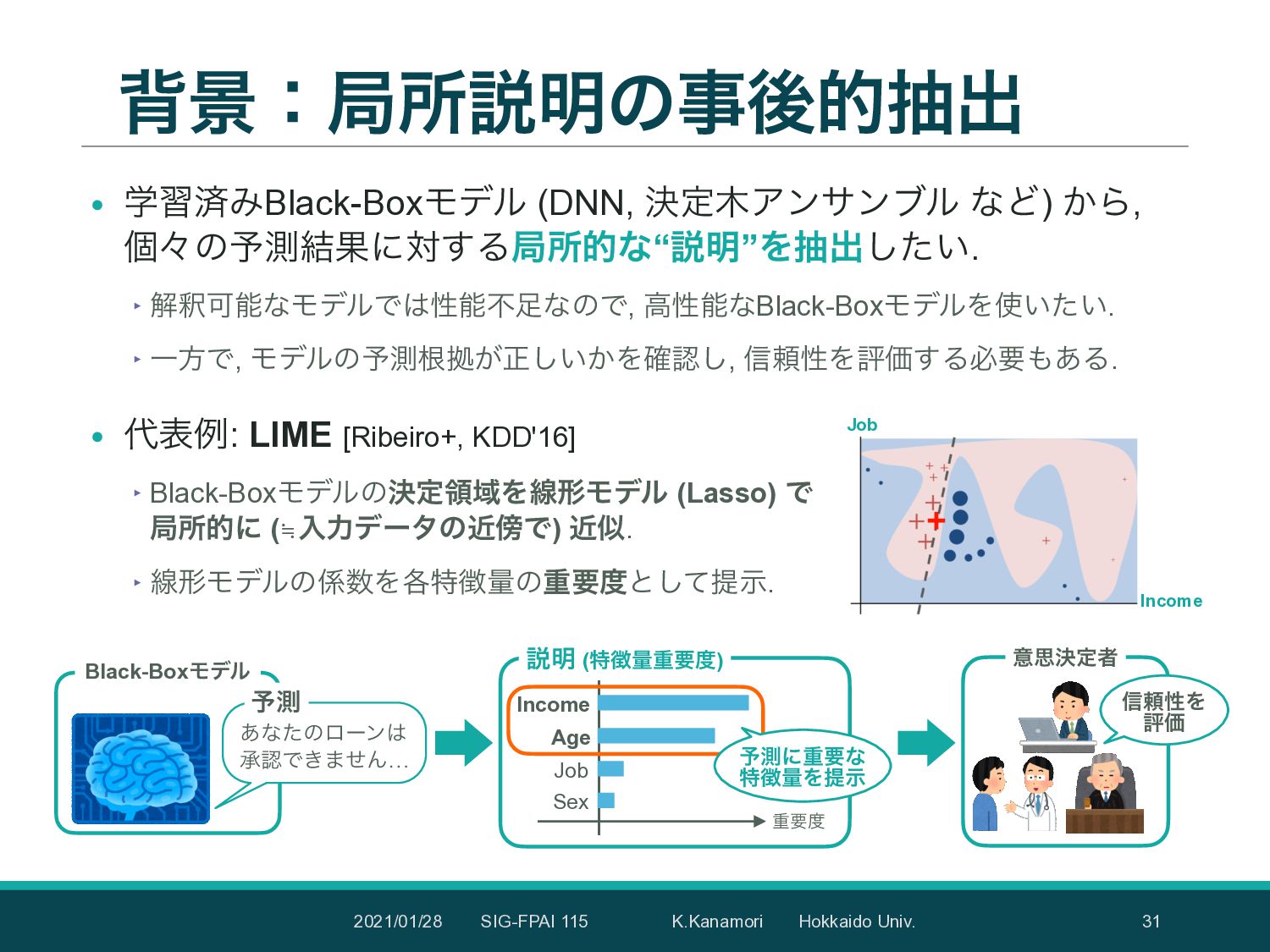
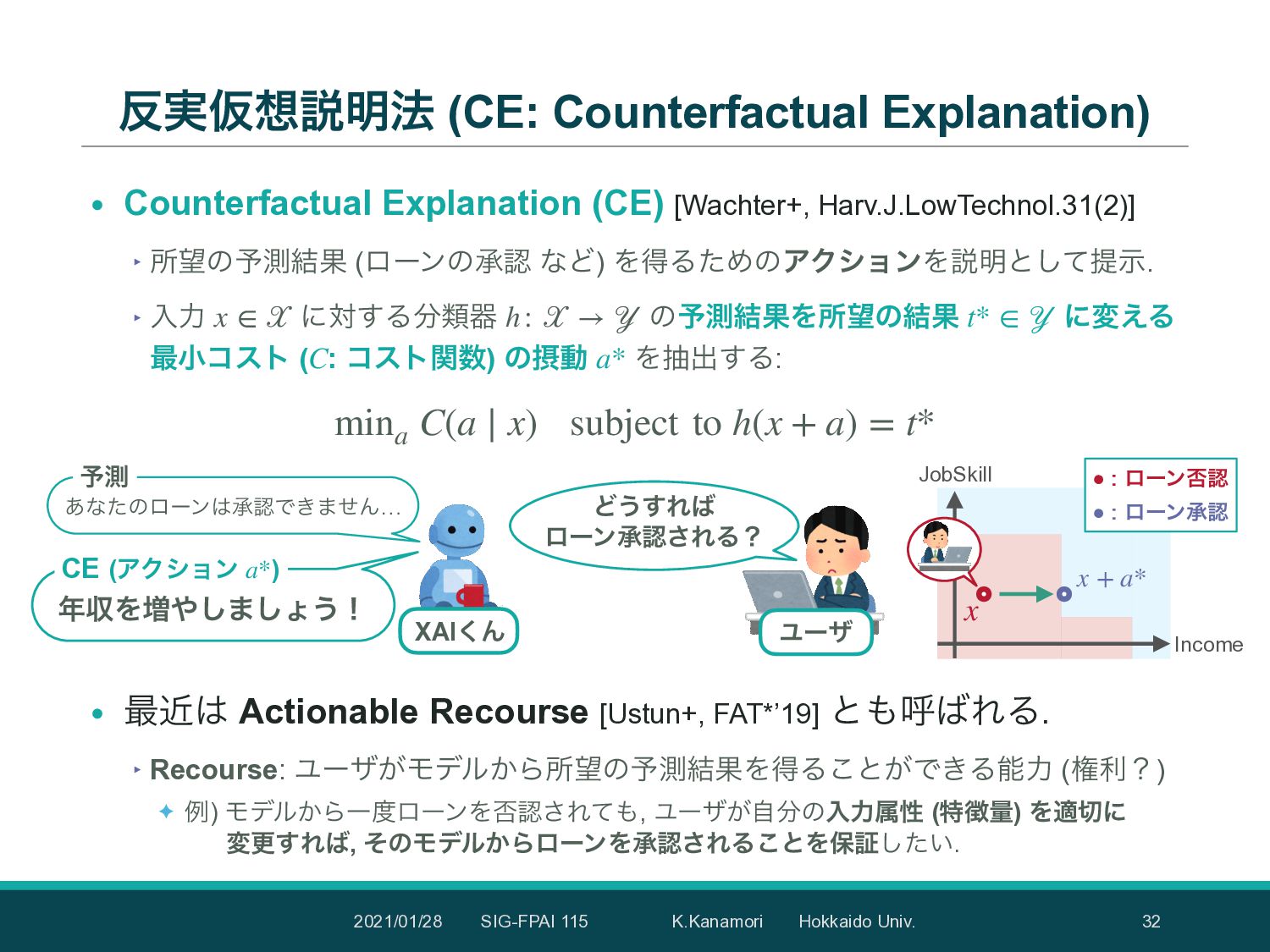
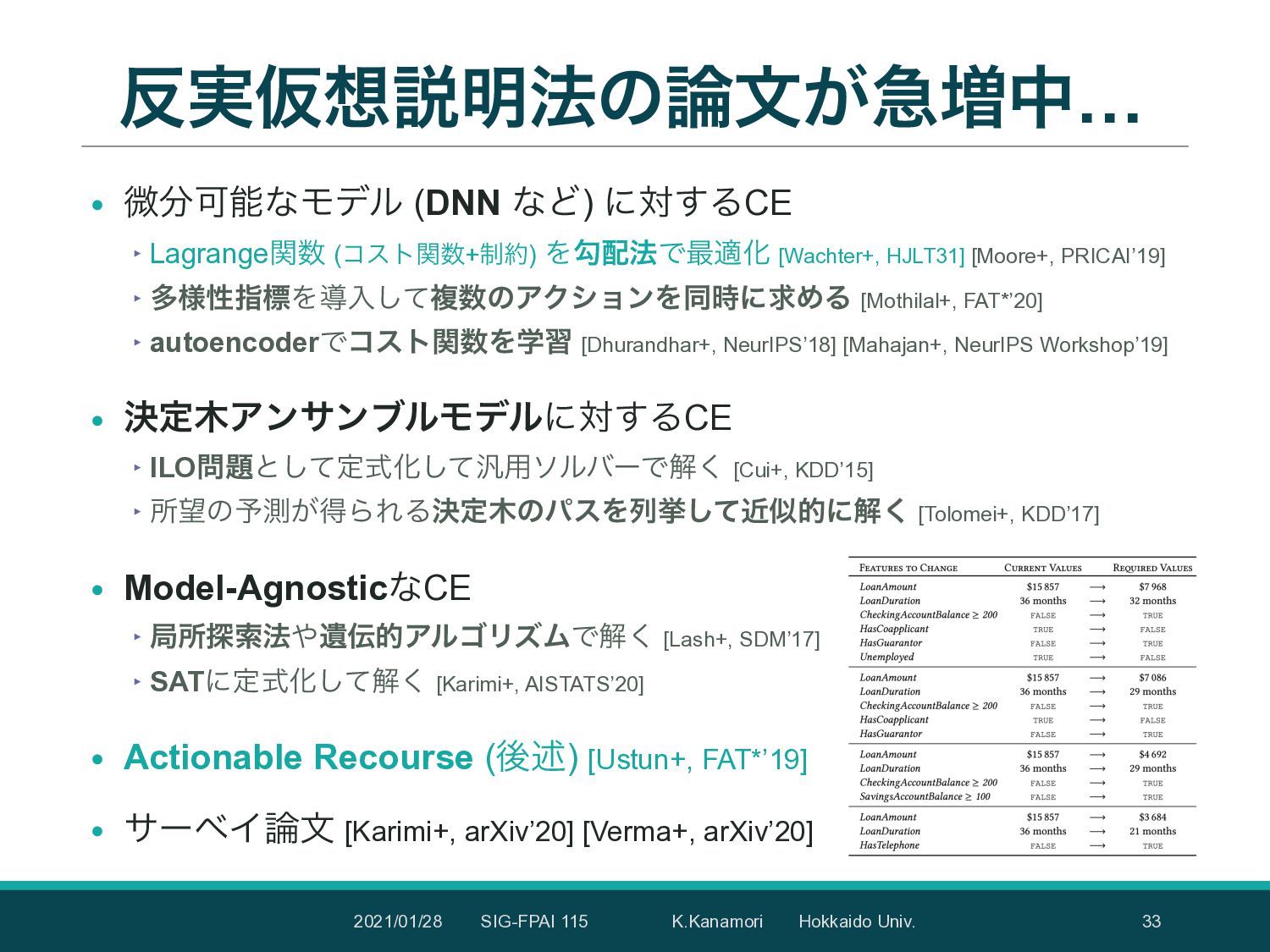
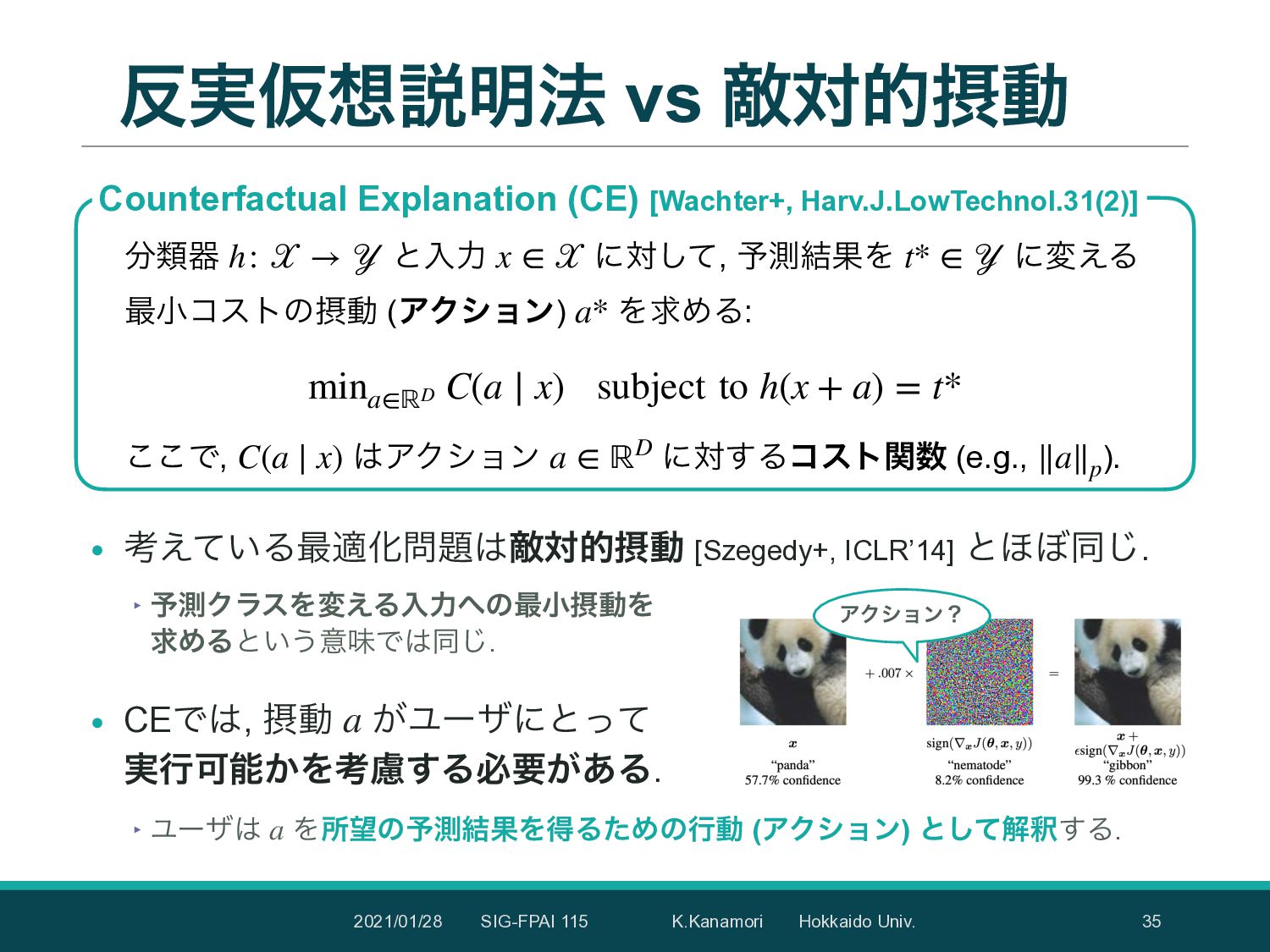
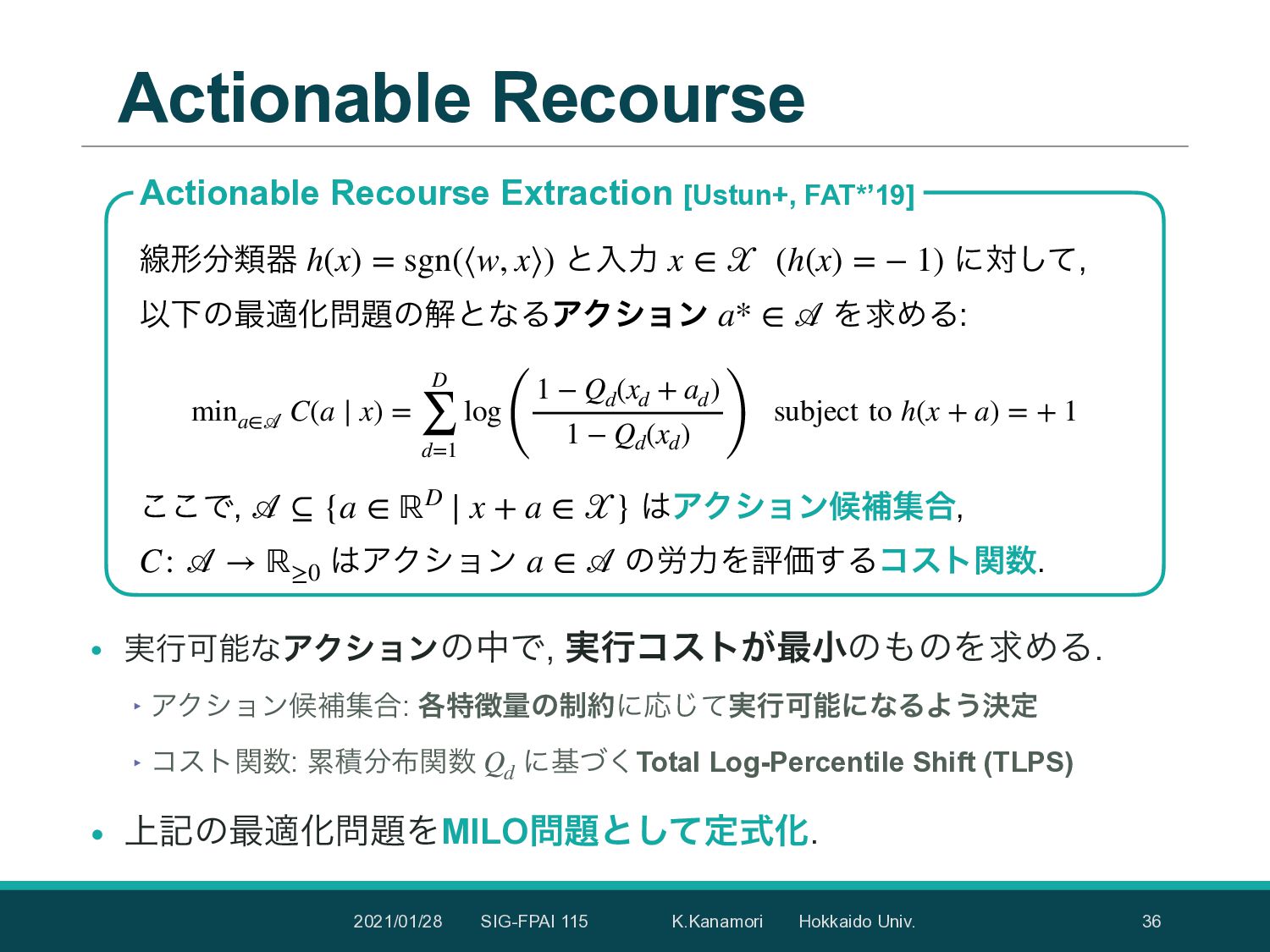
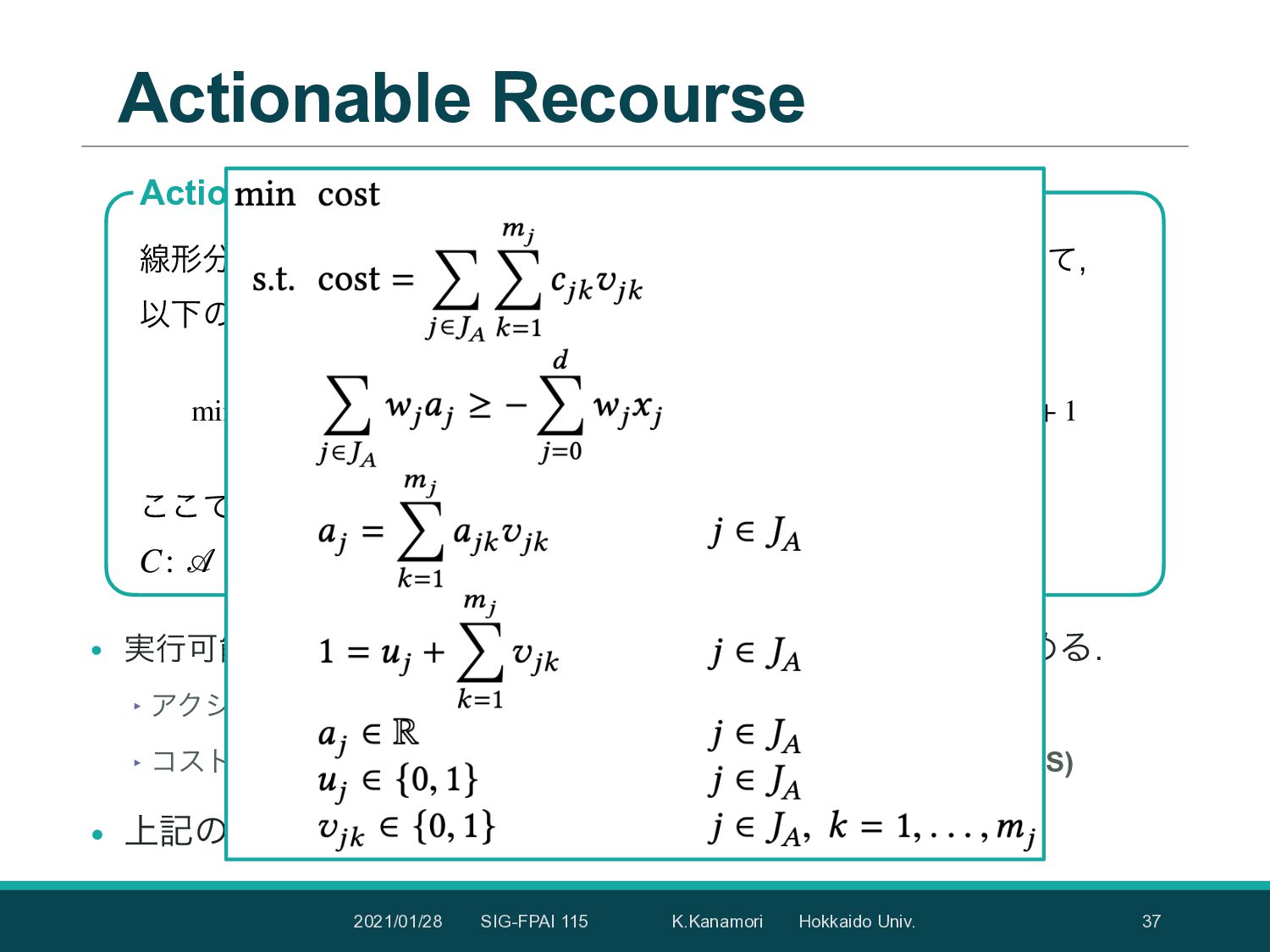
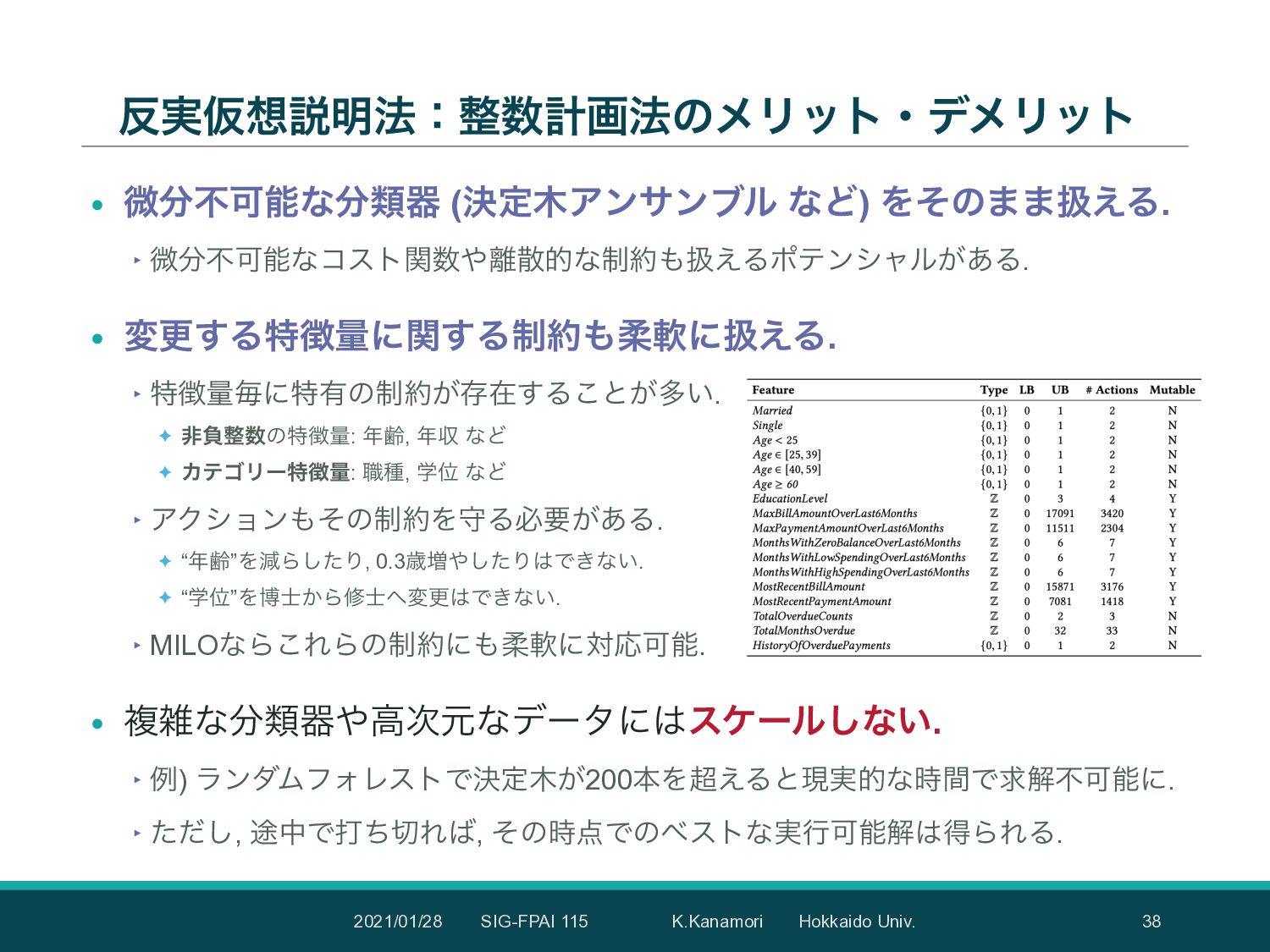
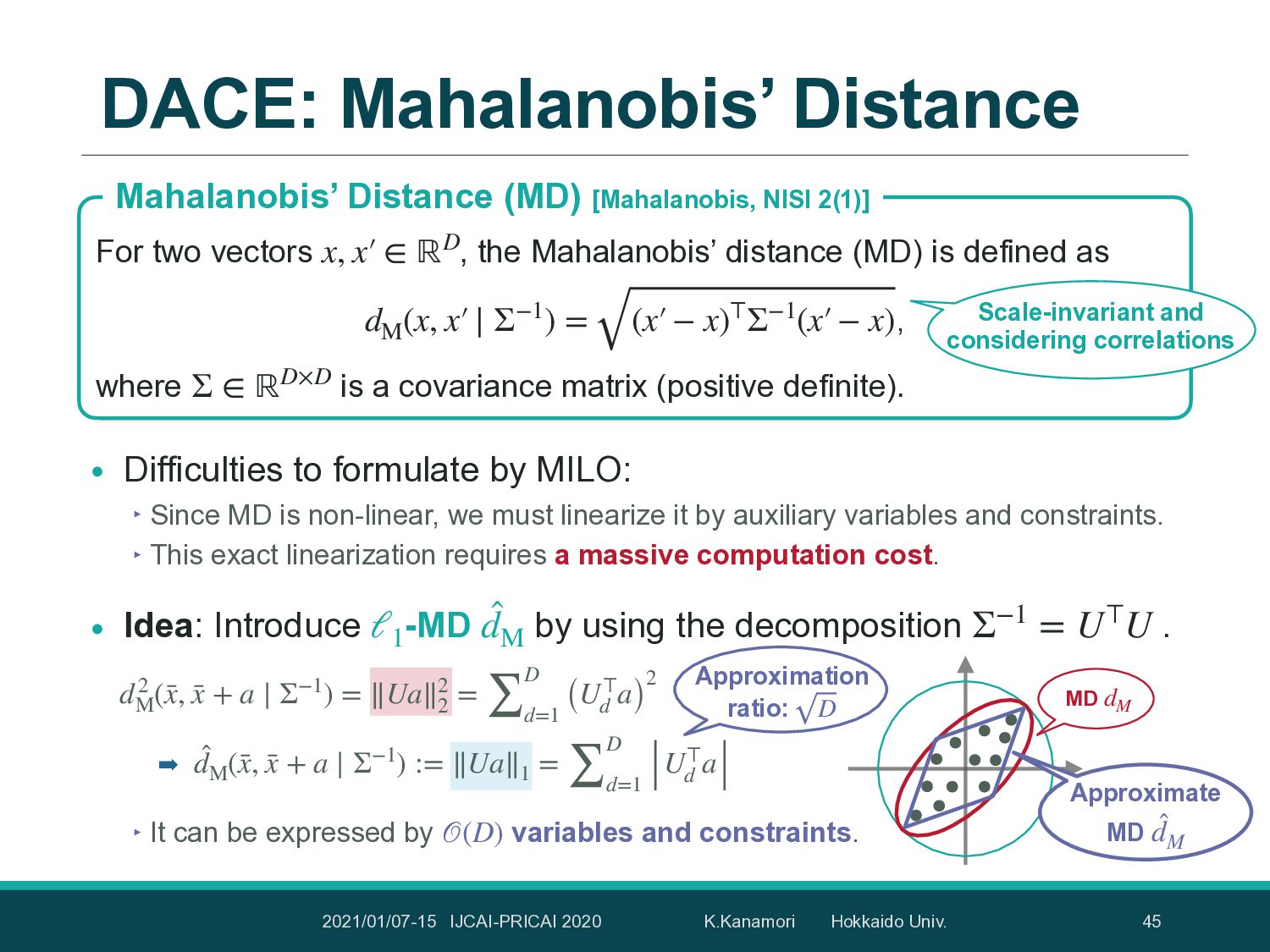
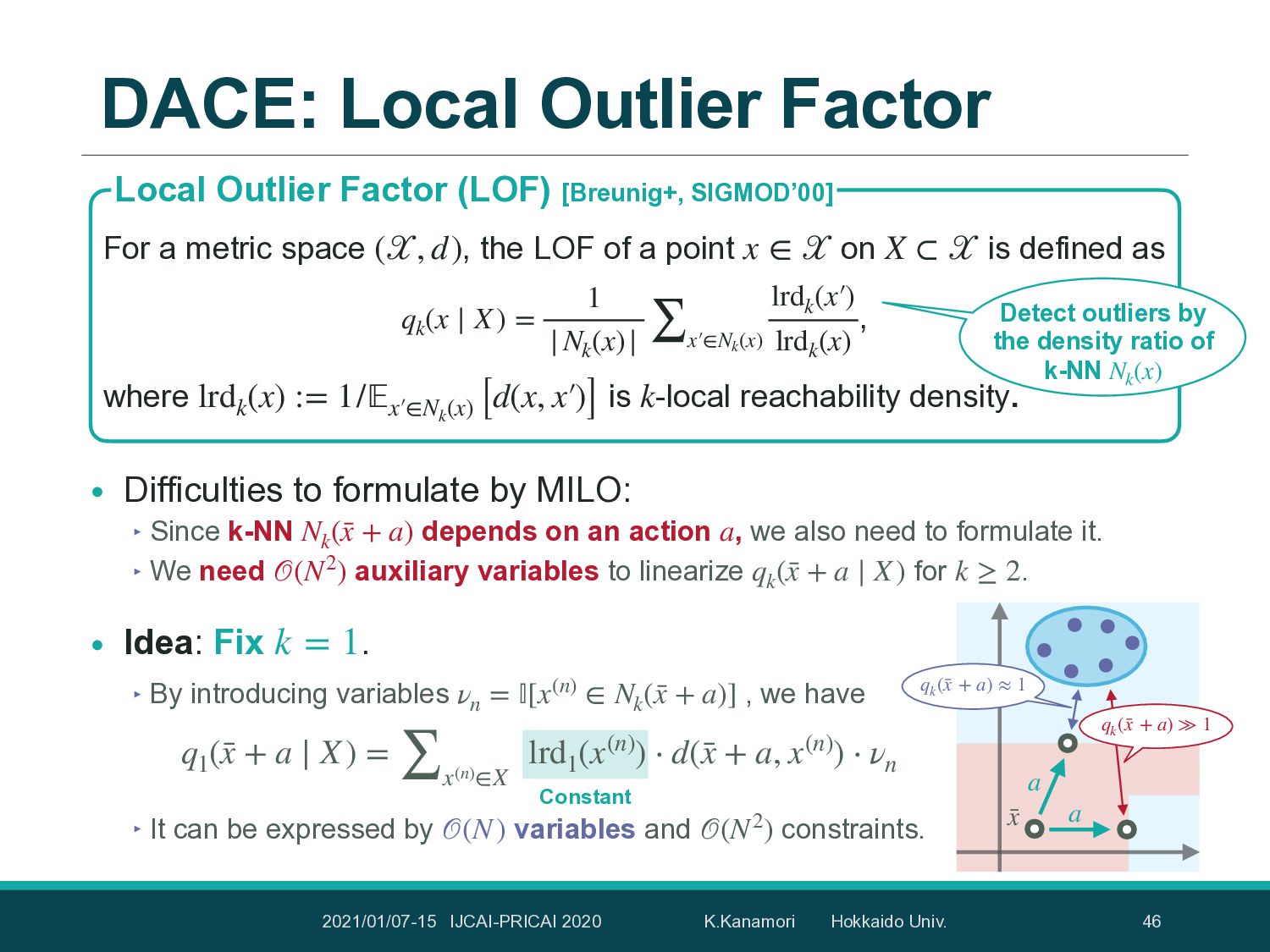
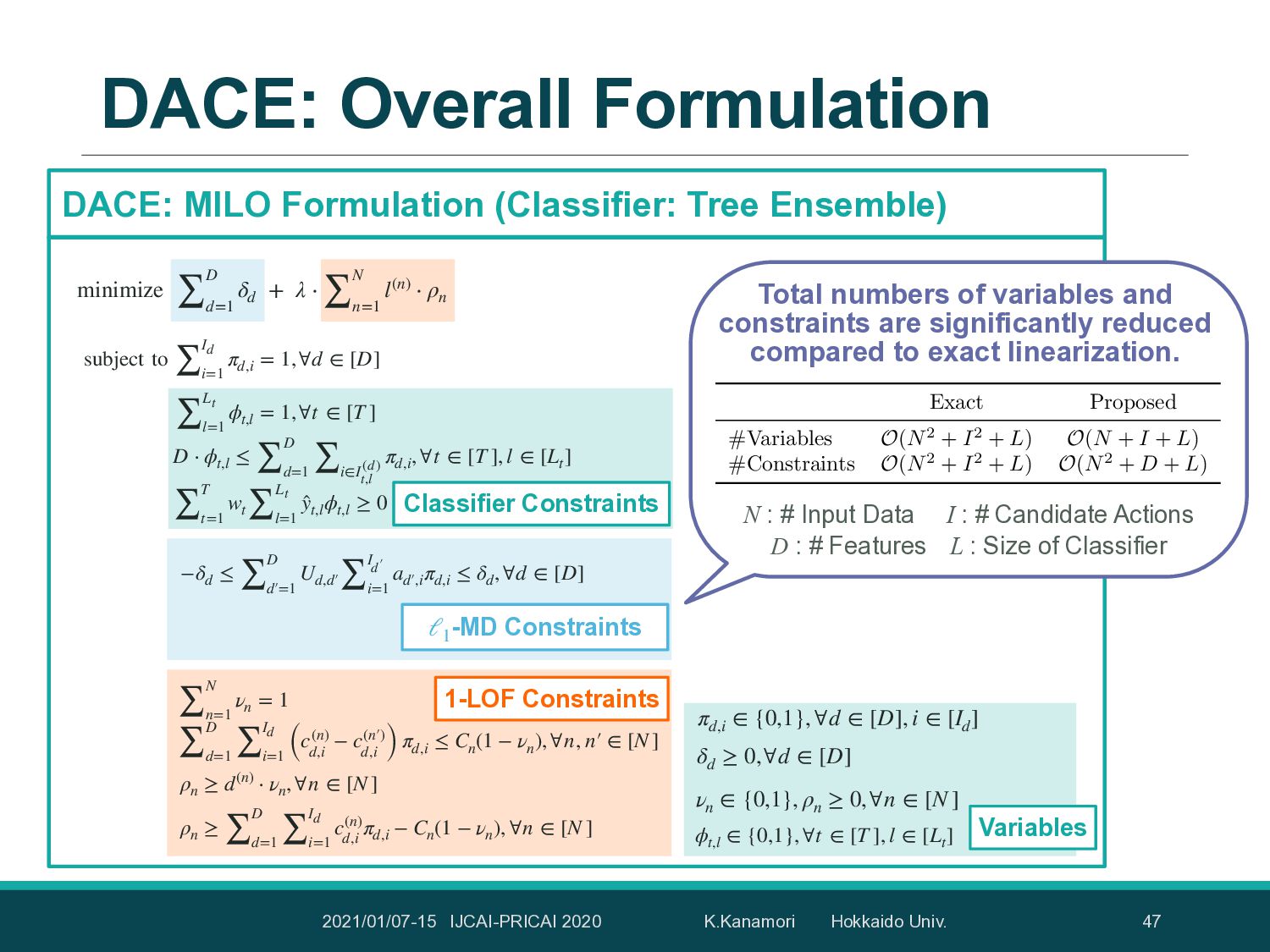
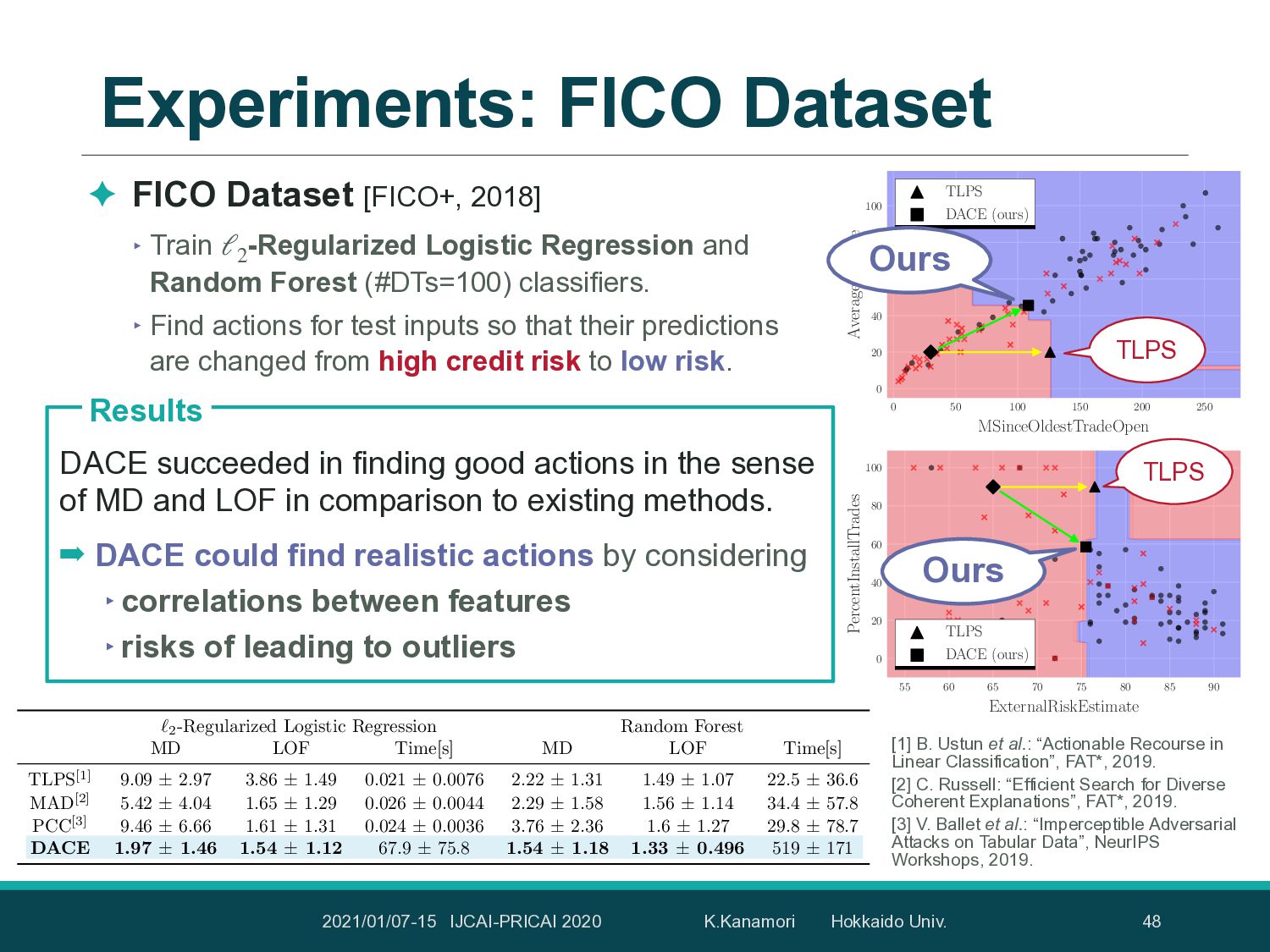
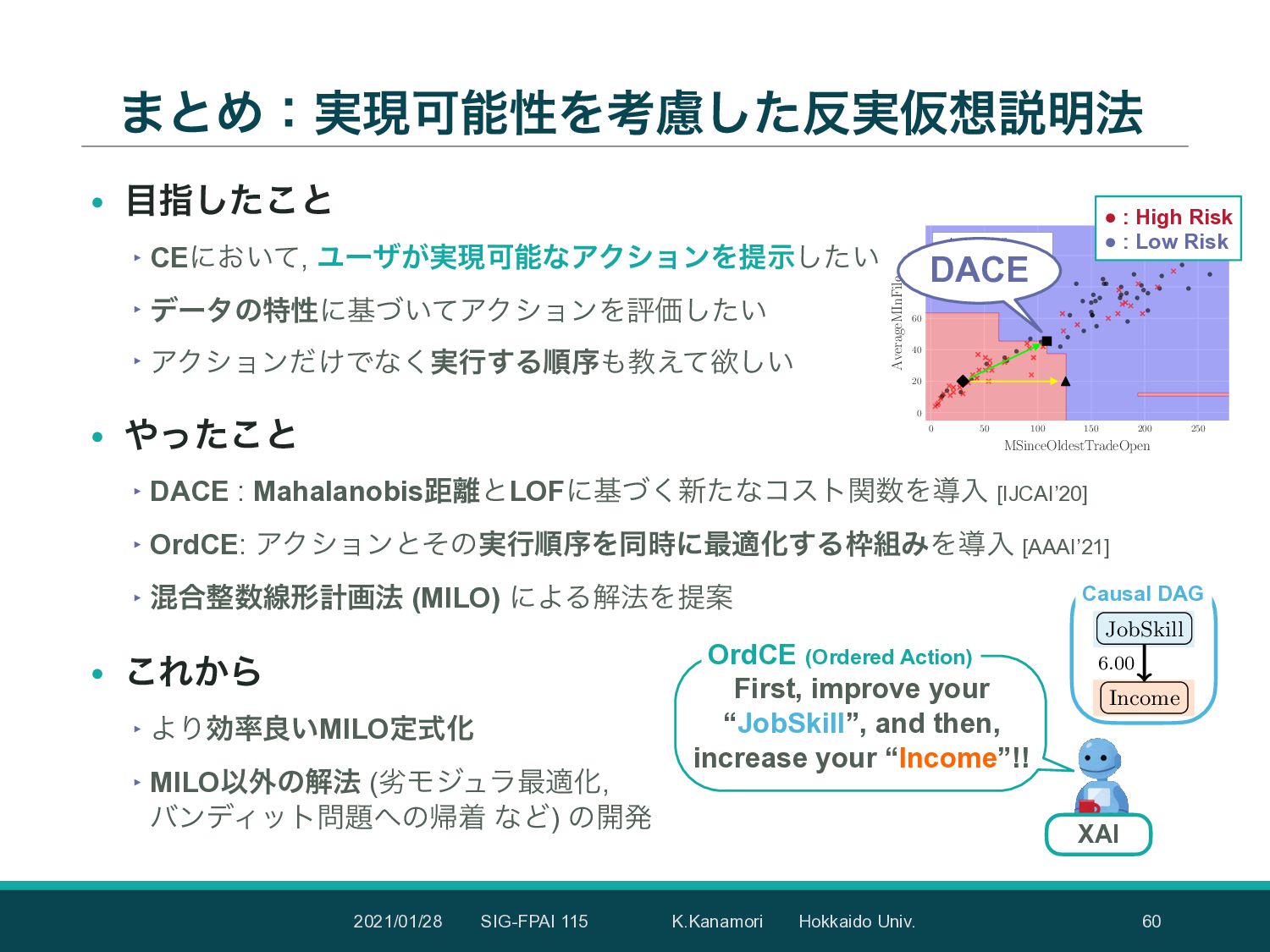
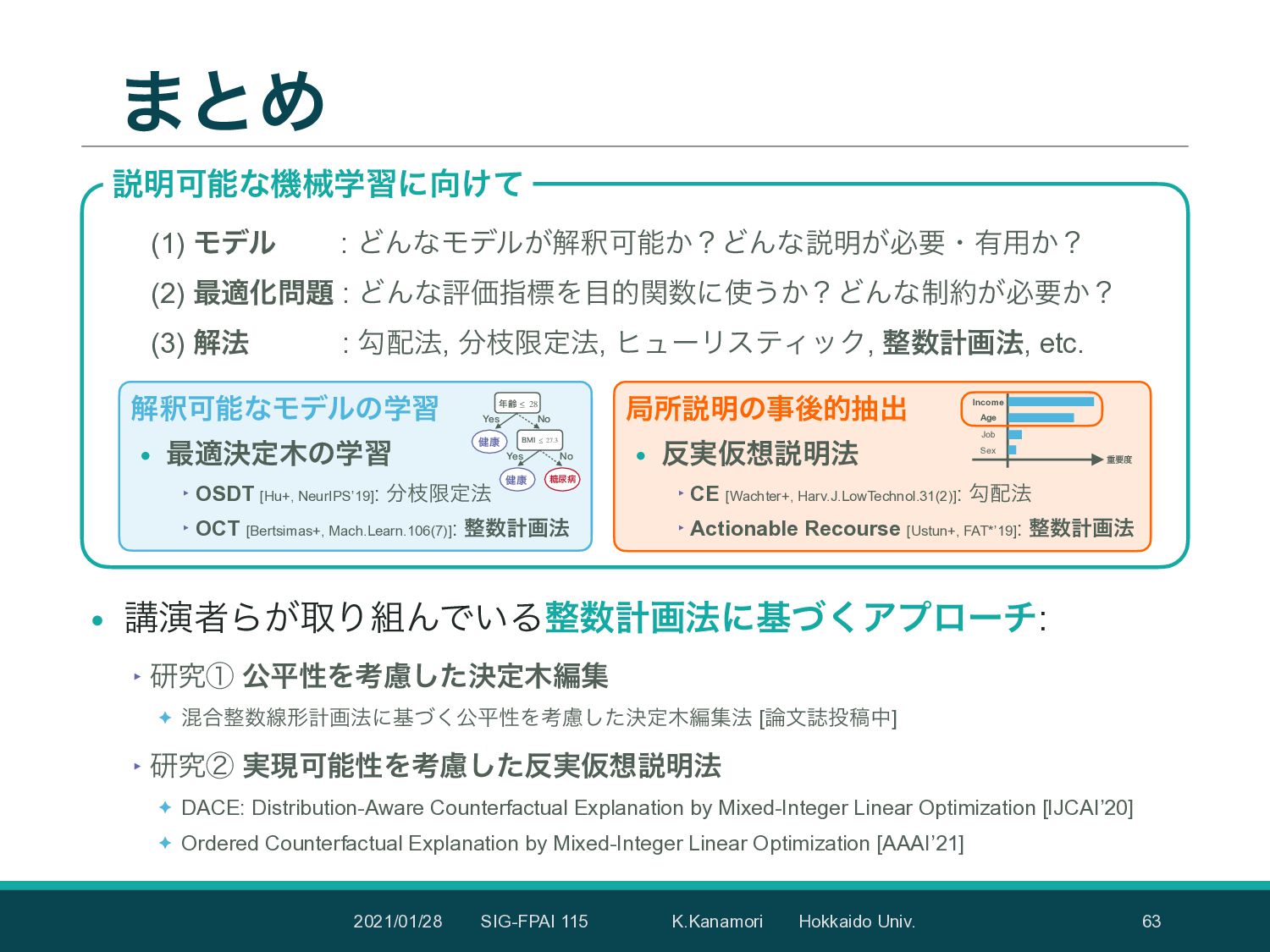
深層学習に代表される機械学習手法の発展により,機械学習モデルが医療や金融などといった実社会意思決定の現場に応用され始めている.これに伴い,機械学習モデルの予測根拠や判断基準を人間が理解可能な形で提示できる“説明可能性 (Explainability) ”の実現が重要視されており,近年活発に研究が行われている.説明可能性の実現を目的としたアプローチには,大きく分けて,(1)決定木に代表される大域的に解釈可能なモデル (Interpretable Models) を学習する方法と,(2)学習済みモデルから局所的な説明を抽出する方法 (Post-hoc Local Explanation) の2つが存在する.これらのアプローチの多くは,そのタスクを最適化問題(L0正則化つき経験損失最小化など)として定式化することで,機械学習モデルの“説明”を数理モデル化することを試みている.しかし,このような最適化問題は,離散的な性質を持つ制約条件の存在や目的関数の微分不可能性などにより,従来の機械学習で広く用いられてきた連続最適化アルゴリズムを直接適用できない場合が多い.これに対して,近年,その柔軟なモデリング能力と汎用ソルバーの発展を背景として,整数計画法 (Integer Programming) に基づく最適化手法が注目を集めている.本講演では,機械学習の説明可能性の実現を目的とした最適化問題に対する整数計画法に基づくアプローチとして,(1)最適決定木 (Optimal Decision Trees [Bertsimas+, Mach.Learn.106]) の学習と,(2)反実仮想説明法 (Counterfactual Explanation [Wachter+, Harv.J.LowTechnol.31(2)]) について紹介する.加えて,整数計画法に基づく手法の具体例として,本講演者が取り組んでいる(1)公平性を考慮した決定木編集法 [Kanamori+, Trans.on JSAI 36(4)]と,(2)実現可能性を考慮した反実仮想説明法 [Kanamori+, IJCAI'20, AAAI'21] についても紹介する.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}