Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
モータ選定 丑の巻
Search
Engineer_MUNE
June 16, 2021
Technology
1.4k
1
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
モータ選定 丑の巻
2021/6/6 FA設備技術勉強会 in ROBOMECH
Engineer_MUNE
June 16, 2021
More Decks by Engineer_MUNE
See All by Engineer_MUNE
最速サイクルタイム設計法
kenichimunezawa
0
2.2k
Other Decks in Technology
See All in Technology
検索技術知識0のエンジニアが広告検索システムを内製化して運用するまで
lycorptech_jp
PRO
0
150
AIQAのナレッジ構築について
qatonchan
1
130
脱Jenkins、インターン生が挑んだCIツールGitHubActions移行
mixi_engineers
PRO
1
260
自己解決や回答速度を上げる、サポート業務へのAIの組み込み方【SORACOM Discovery 2026】
soracom
PRO
0
100
文字起こし基盤の信頼性
abnoumaru
0
150
現場をAIで動かす「フィジカル AI」の組み込み設計の考え方【SORACOM Discovery 2026】
soracom
PRO
0
150
NYC Summit 2026 における Amazon Bedrock AgentCore のアップデート
ren8k
2
270
Amazon Bedrock Managed Knowledge Base Dive Deep
ren8k
0
250
plamo-3-translateの開発
pfn
PRO
0
150
AI Agent を本番環境へ―― Microsoft Foundry × Azure Serverless で作る Enterprise-Ready な基盤
shibayan
PRO
1
830
「待ち時間」の消滅と「自我消耗」の加速:生成AI時代のエンジニアを救うメンタル・リソース管理
poropinai1966
0
320
LLMリーダーボードアップデートに向けたAgentic Math_SWEのトレースについて
nejumi
0
110
Featured
See All Featured
No one is an island. Learnings from fostering a developers community.
thoeni
21
3.8k
The untapped power of vector embeddings
frankvandijk
2
1.8k
Measuring & Analyzing Core Web Vitals
bluesmoon
9
930
Getting science done with accelerated Python computing platforms
jacobtomlinson
2
370
Scaling GitHub
holman
464
140k
svc-hook: hooking system calls on ARM64 by binary rewriting
retrage
2
400
How To Stay Up To Date on Web Technology
chriscoyier
790
250k
Music & Morning Musume
bryan
47
7.3k
コードの90%をAIが書く世界で何が待っているのか / What awaits us in a world where 90% of the code is written by AI
rkaga
62
45k
Save Time (by Creating Custom Rails Generators)
garrettdimon
PRO
32
4k
How to build an LLM SEO readiness audit: a practical framework
nmsamuel
1
820
Marketing Yourself as an Engineer | Alaka | Gurzu
gurzu
0
270
Transcript
虎の巻より もっと基本! ※今年の干支とかけたダジャレです
モータ選定 丑の巻 について 役立てて欲しい方々 ・設計初心者、モーター選定を学びたい皆様 ・教育用の手軽な資料が欲しい中堅~ベテランの皆様 本講の概要 ・モータ選定の全体の流れ ・ツールを使う前に知っていて欲しいモータの基礎知識 (力学/動き)
・選定で意識するポイントの紹介 さらに学びたい方々へ ・モーターの仕組み等は書籍を ・選定式はモータメーカの資料を ご参照あれ
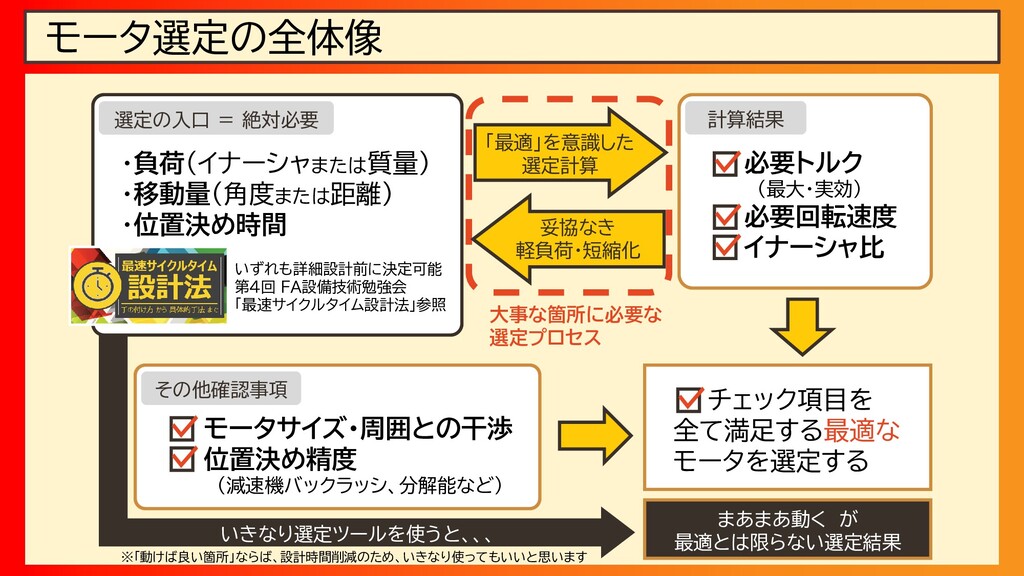
モータ選定の全体像 ・負荷(イナーシャまたは質量) ・移動量(角度または距離) ・位置決め時間 必要トルク (最大・実効) 必要回転速度 イナーシャ比 モータサイズ・周囲との干渉 位置決め精度
(減速機バックラッシ、分解能など) いずれも詳細設計前に決定可能 第4回 FA設備技術勉強会 「最速サイクルタイム設計法」参照 選定の入口 = 絶対必要 計算結果 その他確認事項 チェック項目を 全て満足する最適な モータを選定する いきなり選定ツールを使うと、、、 「最適」を意識した 選定計算 まあまあ動く が 最適とは限らない選定結果 妥協なき 軽負荷・短縮化 大事な箇所に必要な 選定プロセス ※「動けば良い箇所」ならば、設計時間削減のため、いきなり使ってもいいと思います
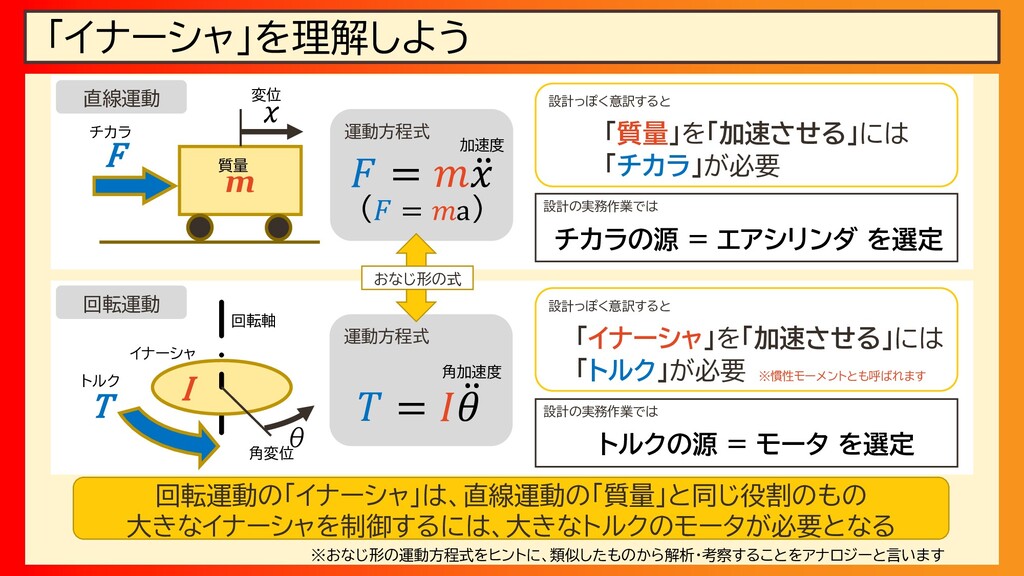
運動方程式 運動方程式 「イナーシャ」を理解しよう m I F T x θ 𝐹
= 𝑚 ሷ 𝑥 𝑇 = 𝐼 ሷ 𝜃 直線運動 回転運動 「質量」を「加速させる」には 「チカラ」が必要 「イナーシャ」を「加速させる」には 「トルク」が必要 チカラ トルク 角変位 変位 質量 イナーシャ 加速度 角加速度 回転軸 設計っぽく意訳すると 設計っぽく意訳すると チカラの源 = エアシリンダ を選定 ※慣性モーメントとも呼ばれます 設計の実務作業では トルクの源 = モータ を選定 設計の実務作業では おなじ形の式 回転運動の「イナーシャ」は、直線運動の「質量」と同じ役割のもの 大きなイナーシャを制御するには、大きなトルクのモータが必要となる ※おなじ形の運動方程式をヒントに、類似したものから解析・考察することをアナロジーと言います (𝐹 = 𝑚a)
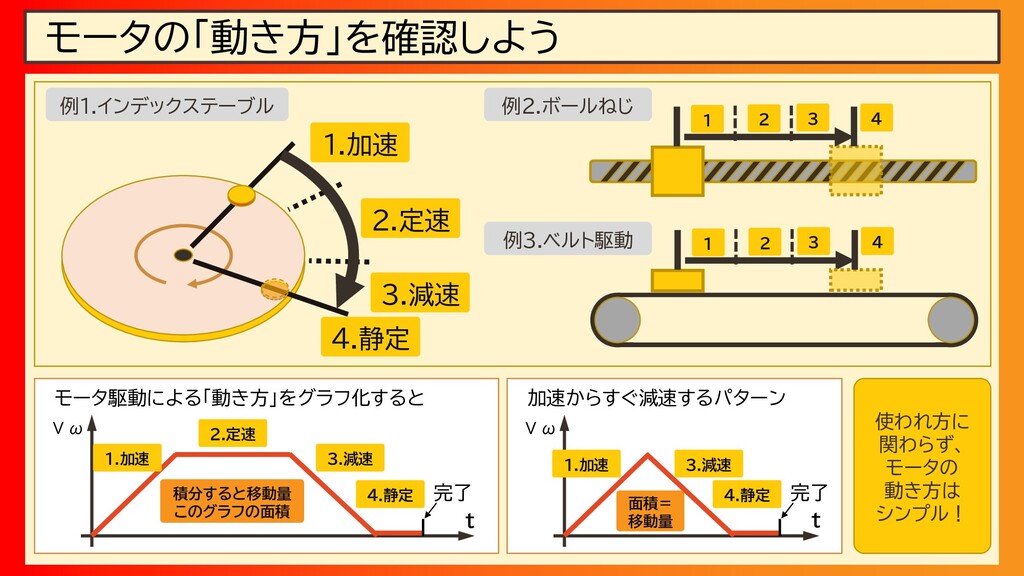
モータの「動き方」を確認しよう 1.加速 2.定速 3.減速 4.静定 1 2 3 4 1
2 3 4 例1.インデックステーブル 例2.ボールねじ 例3.ベルト駆動 1.加速 2.定速 3.減速 4.静定 積分すると移動量 このグラフの面積 V ω t モータ駆動による「動き方」をグラフ化すると 完了 1.加速 3.減速 4.静定 面積= 移動量 V ω t 加速からすぐ減速するパターン 完了 使われ方に 関わらず、 モータの 動き方は シンプル!
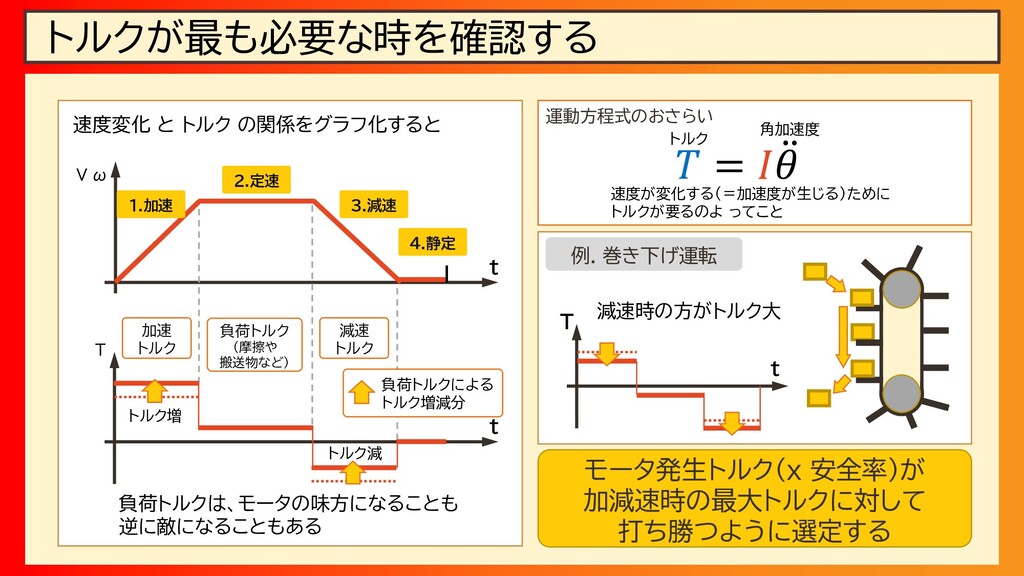
トルクが最も必要な時を確認する 1.加速 2.定速 3.減速 4.静定 V ω t 運動方程式のおさらい 𝑇
= 𝐼 ሷ 𝜃 角加速度 トルク T t 加速 トルク 負荷トルク (摩擦や 搬送物など) 減速 トルク 速度変化 と トルク の関係をグラフ化すると 速度が変化する(=加速度が生じる)ために トルクが要るのよ ってこと 負荷トルクは、モータの味方になることも 逆に敵になることもある 負荷トルクによる トルク増減分 トルク増 トルク減 例. 巻き下げ運転 T t 減速時の方がトルク大 モータ発生トルク(x 安全率)が 加減速時の最大トルクに対して 打ち勝つように選定する
選定で意識しておくポイント V ω t ほぼ同じトルク安全率なら、減速機付きよりも、 モータ軸に直付け(または低減速比)を選びたい。 出力軸を減速すると、モータのロータ加速のた めにトルクが消費されてしまう。 (消費電力も総回転数も増える) 変位が比較的小さい時
変位が比較的大きい時 減速機+ 小□サイズ モータ 低減速比GB付モータ モータの力を活かすために なるべく「直付け」を選ぼう 低減速比なGB付モータの方が、速度が伸びるた め、より速く目的の変位を得られる。 高減速比GBで加速を速めても、さして速くなら ない。質量や負荷を削って本質的に高速化して おく工夫をサボらぬこと! 意外とよくある「大トルクなら安全」 「加速力」調整は焼け石に水 大□サイズ モータ 高減速比GB付モータ 調整で無理しても 傾きが増えるだけ 負荷と同じ加速 負荷より大きな加速
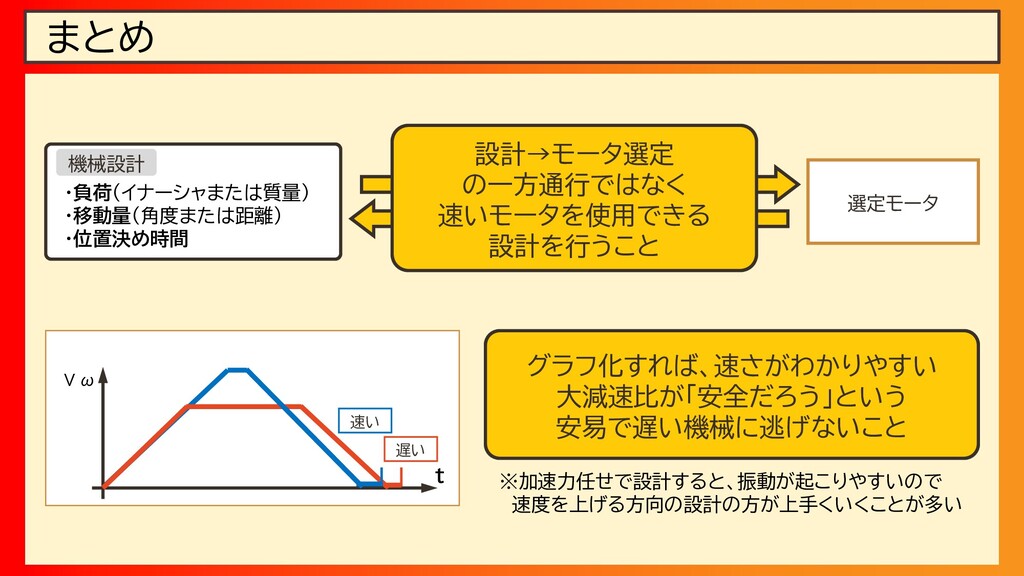
まとめ 機械設計 ・負荷(イナーシャまたは質量) ・移動量(角度または距離) ・位置決め時間 選定モータ 設計→モータ選定 の一方通行ではなく 速いモータを使用できる 設計を行うこと
グラフ化すれば、速さがわかりやすい 大減速比が「安全だろう」という 安易で遅い機械に逃げないこと V ω t ※加速力任せで設計すると、振動が起こりやすいので 速度を上げる方向の設計の方が上手くいくことが多い 速い 遅い
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}