Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
最速サイクルタイム設計法
Search
Engineer_MUNE
March 27, 2021
Technology
2.2k
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
最速サイクルタイム設計法
第4回FA設備技術勉強会 2021/03/27 での発表スライドです。
Engineer_MUNE
March 27, 2021
More Decks by Engineer_MUNE
See All by Engineer_MUNE
モータ選定 丑の巻
kenichimunezawa
1
1.4k
Other Decks in Technology
See All in Technology
コンポーネント名には何を含めるべきなのか? / what-should-be-included-in-component-names
airrnot1106
0
180
基調講演:人とAIをつなぐIoTの今と未来 ー 「フィジカル」と「デジタル」が出会うその先へ【SORACOM Discovery 2026】
soracom
PRO
0
360
ここは地獄!つらい朝会を体験することで、チームとしてのより良い振る舞いに気づくワークショップ / The stand-up meeting from hell in the game industry
scrummasudar
0
440
【5分でわかる】セーフィー エンジニア向け会社紹介
safie_recruit
0
53k
データと地図で読む 大井町の「かわるもの、かわらないもの」
yoshiyama_hana
0
600
MCPをつなげて作る組織横断のAIエージェント基盤
tsubakimoto_s
0
360
カメラ×AIで挑む「ホワイト物流」― 車両管理、自動化の壁と突破口【SORACOM Discovery 2026】
soracom
PRO
0
180
ソフトウェアアーキテクチャ研修【MIXI 26新卒技術研修】
mixi_engineers
PRO
2
990
新たなDBアーキテクチャ「LTAP」にDeep Dive!!
inoutk
0
150
データエンジニアこそ組織のオントロジーに向き合うべき — 問いに答えるAIから、事業を動かすAIへ
gappy50
4
1.6k
Claude Code並行開発環境の ムダ‧ムラ‧ムリを見直した話
muranakaaa
0
300
人依存からAIネイティブの体制へ:バックエンド開発の裏側【SORACOM Discovery 2026】
soracom
PRO
0
130
Featured
See All Featured
What’s in a name? Adding method to the madness
productmarketing
PRO
24
4.1k
sira's awesome portfolio website redesign presentation
elsirapls
0
310
RailsConf & Balkan Ruby 2019: The Past, Present, and Future of Rails at GitHub
eileencodes
141
35k
Keith and Marios Guide to Fast Websites
keithpitt
413
23k
We Are The Robots
honzajavorek
0
290
Designing for humans not robots
tammielis
254
26k
Lightning Talk: Beautiful Slides for Beginners
inesmontani
PRO
2
610
How To Stay Up To Date on Web Technology
chriscoyier
790
250k
AI Search: Where Are We & What Can We Do About It?
aleyda
0
7.7k
Making the Leap to Tech Lead
cromwellryan
135
10k
SERP Conf. Vienna - Web Accessibility: Optimizing for Inclusivity and SEO
sarafernandez
2
1.5k
Crafting Experiences
bethany
1
230
Transcript
設計法 手の付け方 から 具体的手法 まで Twitter:@Engineer_MUNE 第4回FA設備技術勉強会 #FA_Study 最速サイクルタイム 承諾無しの二次配布/切取引用を禁じます
2021/03/27
開発機の 目標サイクルタイム を 最速クリア する設計法の紹介 最速サイクルタイム設計法を使って 創った機械 と お仕事完了 どちらも「最速」を目指そう!
本講の目的 「最速サイクルタイム設計法」 本講の目的 ・実務で有効なサイクルタイムの計算 ・机上で目標サイクルを満たした設計 「サイクルタイム設計」 とは 定義 => 機械を動かす前に「速さ」の追求は終わっている ※本講の「サイクルタイム」は 「製品1つを何秒で作れるか」 という意味で使っています。
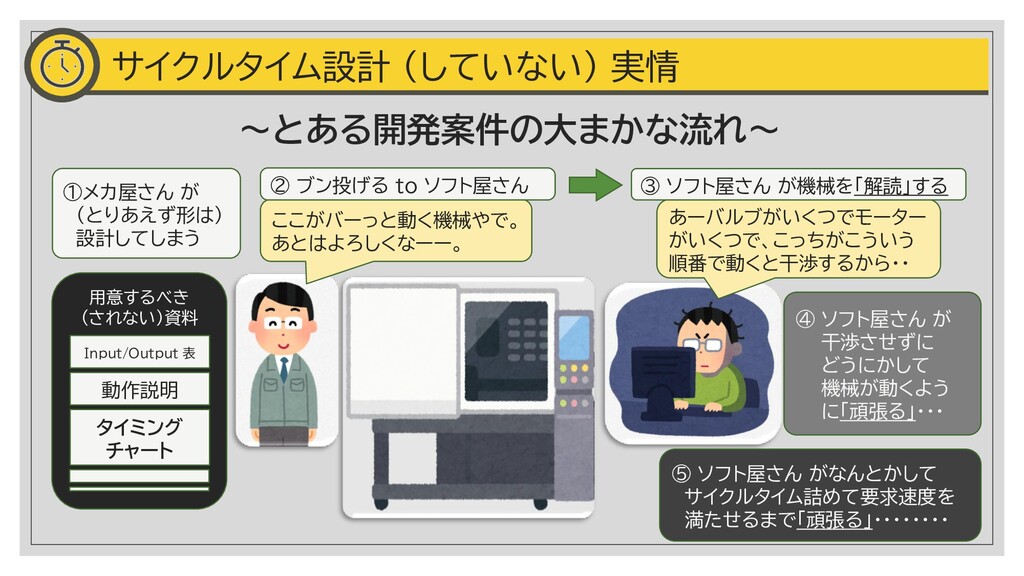
用意するべき (されない)資料 サイクルタイム設計 (していない) 実情 あーバルブがいくつでモーター がいくつで、こっちがこういう 順番で動くと干渉するから・・ ①メカ屋さん が
(とりあえず形は) 設計してしまう ③ ソフト屋さん が機械を「解読」する ④ ソフト屋さん が 干渉させずに どうにかして 機械が動くよう に「頑張る」・・・ ⑤ ソフト屋さん がなんとかして サイクルタイム詰めて要求速度を 満たせるまで「頑張る」・・・・・・・・ Input/Output 表 動作説明 タイミング チャート ~とある開発案件の大まかな流れ~ ここがバーっと動く機械やで。 あとはよろしくなーー。 ② ブン投げる to ソフト屋さん
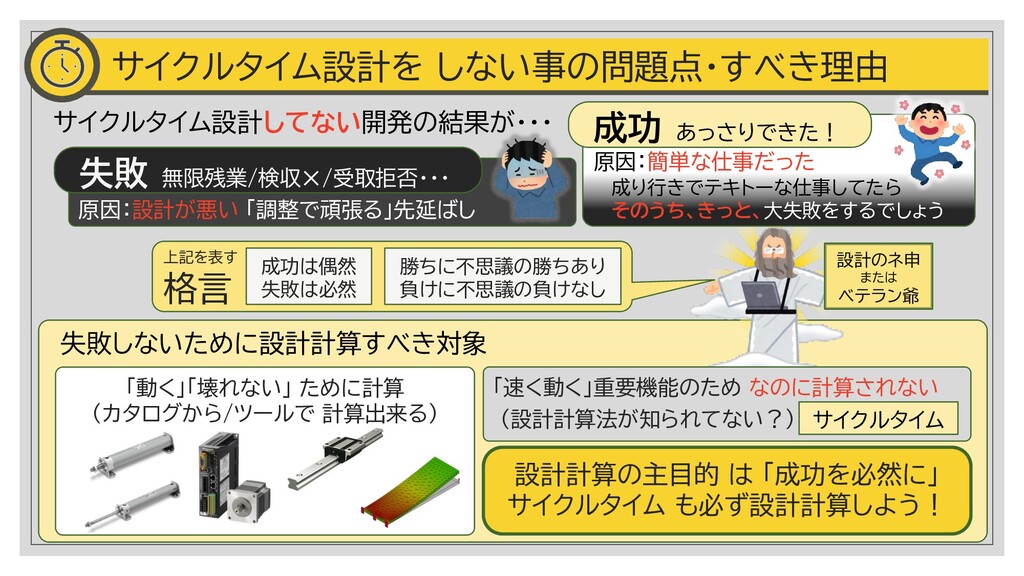
上記を表す 格言 サイクルタイム設計を しない事の問題点・すべき理由 成功は偶然 失敗は必然 勝ちに不思議の勝ちあり 負けに不思議の負けなし 原因:簡単な仕事だった 原因:設計が悪い
「調整で頑張る」先延ばし 成り行きでテキトーな仕事してたら そのうち、きっと、大失敗をするでしょう サイクルタイム設計してない開発の結果が・・・ 失敗 無限残業/検収✕/受取拒否・・・ 成功 あっさりできた! 設計計算の主目的 は 「成功を必然に」 サイクルタイム も必ず設計計算しよう! 「動く」「壊れない」 ために計算 (カタログから/ツールで 計算出来る) 設計のネ申 または ベテラン爺 失敗しないために設計計算すべき対象 「速く動く」重要機能のため なのに計算されない (設計計算法が知られてない?) サイクルタイム
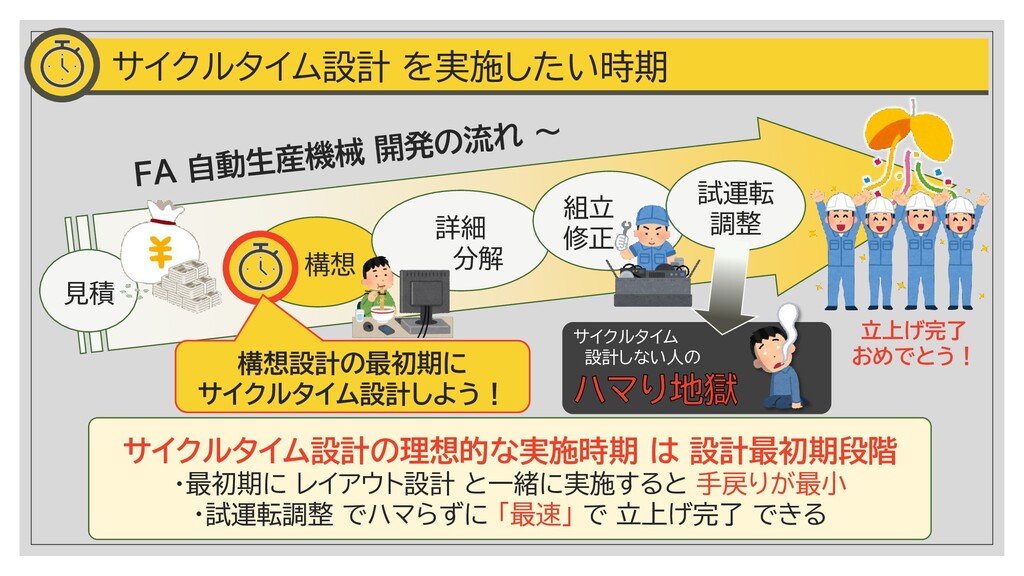
サイクルタイム 設計しない人の サイクルタイム設計 を実施したい時期 サイクルタイム設計の理想的な実施時期 は 設計最初期段階 ・最初期に レイアウト設計 と一緒に実施すると
手戻りが最小 ・試運転調整 でハマらずに 「最速」 で 立上げ完了 できる 見積 構想 詳細 分解 組立 修正 試運転 調整 立上げ完了 おめでとう! 構想設計の最初期に サイクルタイム設計しよう!
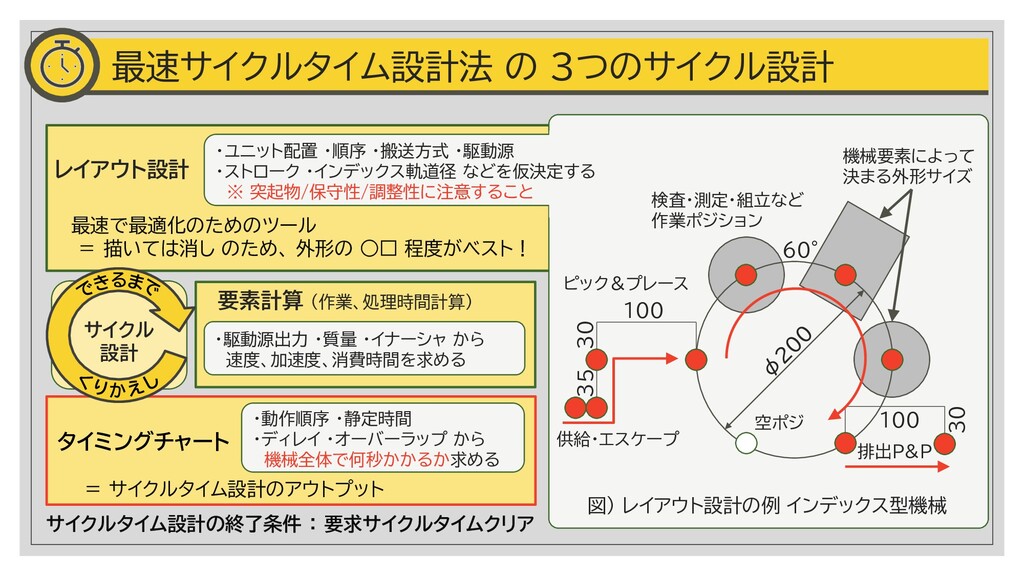
レイアウト設計 最速で最適化のためのツール = 描いては消し のため、 外形の ◦□ 程度がベスト! 最速サイクルタイム設計法 の
3つのサイクル設計 100 30 35 100 30 60° 図) レイアウト設計の例 インデックス型機械 供給・エスケープ ピック&プレース 検査・測定・組立など 作業ポジション 排出P&P 機械要素によって 決まる外形サイズ 要素計算 (作業、処理時間計算) 空ポジ ・駆動源出力 ・質量 ・イナーシャ から 速度、加速度、消費時間を求める ・動作順序 ・静定時間 ・ディレイ ・オーバーラップ から 機械全体で何秒かかるか求める = サイクルタイム設計のアウトプット タイミングチャート サイクルタイム設計の終了条件 : 要求サイクルタイムクリア ・ユニット配置 ・順序 ・搬送方式 ・駆動源 ・ストローク ・インデックス軌道径 などを仮決定する ※ 突起物/保守性/調整性に注意すること サイクル 設計 る か
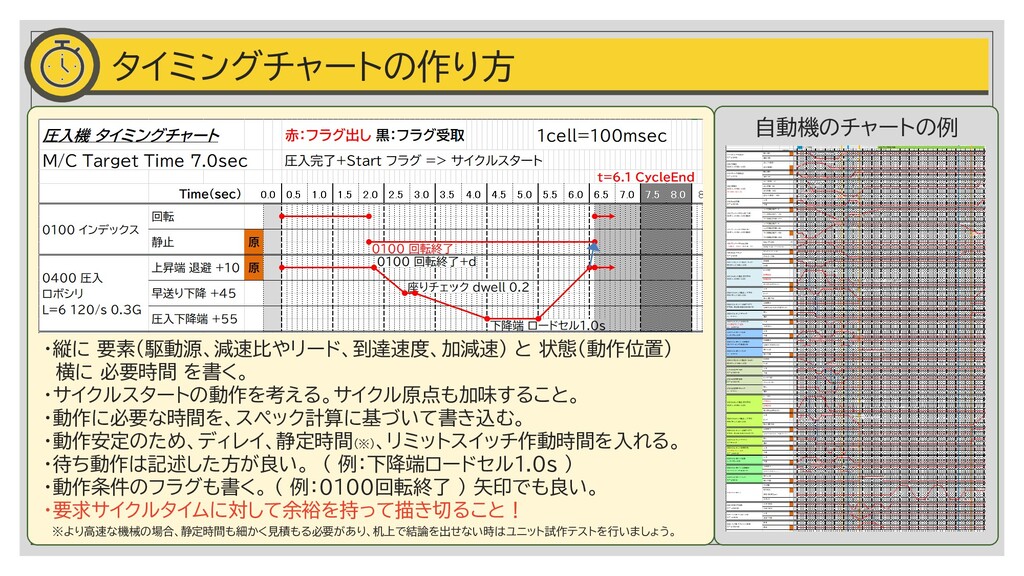
自動機のチャートの例 ・縦に 要素(駆動源、減速比やリード、到達速度、加減速) と 状態(動作位置) 横に 必要時間 を書く。 ・サイクルスタートの動作を考える。サイクル原点も加味すること。 ・動作に必要な時間を、スペック計算に基づいて書き込む。
・動作安定のため、ディレイ、静定時間(※) 、リミットスイッチ作動時間を入れる。 ・待ち動作は記述した方が良い。 ( 例:下降端ロードセル1.0s ) ・動作条件のフラグも書く。 ( 例:0100回転終了 ) 矢印でも良い。 ・要求サイクルタイムに対して余裕を持って描き切ること! タイミングチャートの作り方 ※より高速な機械の場合、静定時間も細かく見積もる必要があり、机上で結論を出せない時はユニット試作テストを行いましょう。
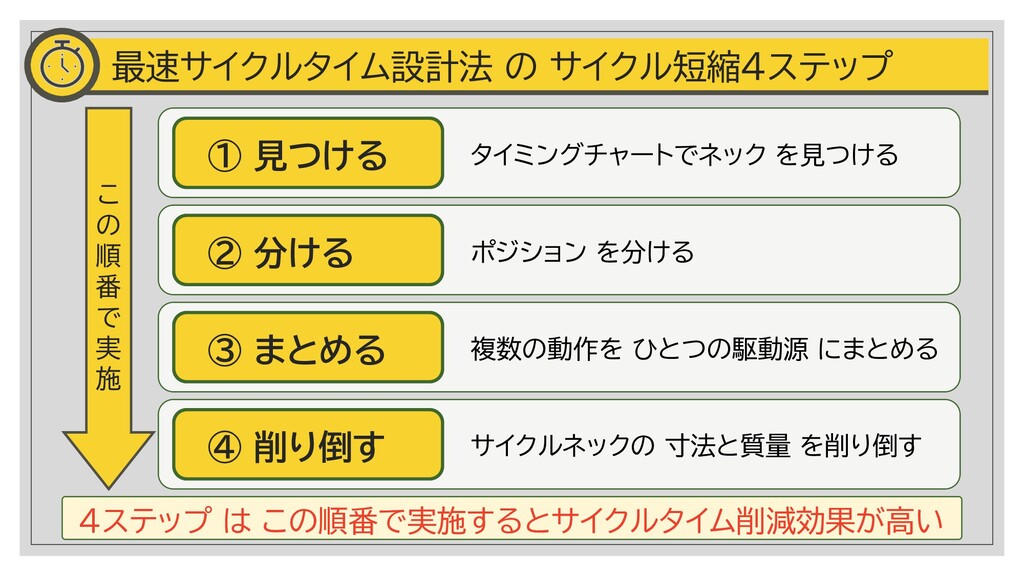
最速サイクルタイム設計法 の サイクル短縮4ステップ ① 見つける ② 分ける ③ まとめる ④
削り倒す タイミングチャートでネック を見つける ポジション を分ける 複数の動作を ひとつの駆動源 にまとめる サイクルネックの 寸法と質量 を削り倒す 4ステップ は この順番で実施するとサイクルタイム削減効果が高い こ の 順 番 で 実 施
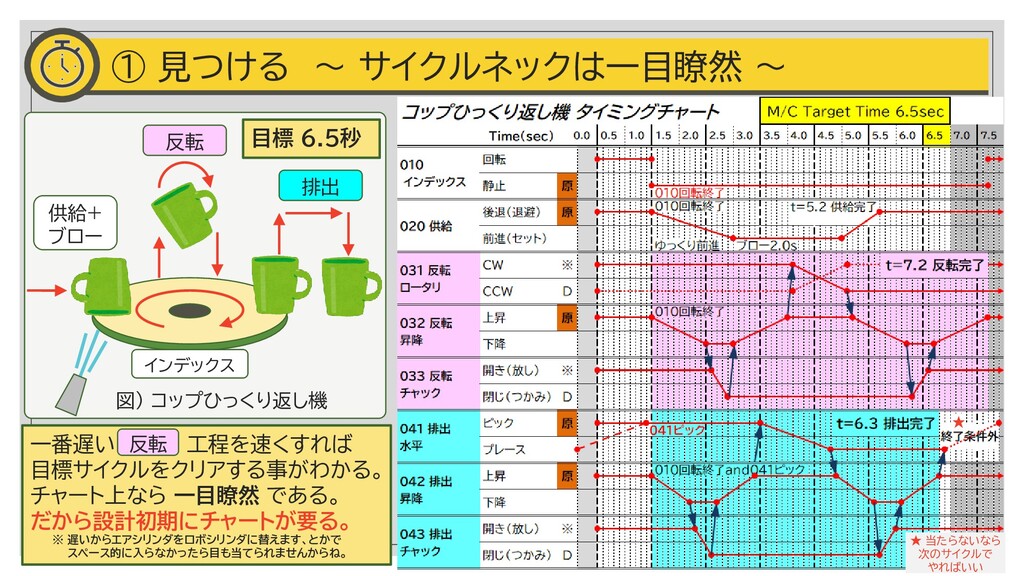
① 見つける ~ サイクルネックは一目瞭然 ~ 排出 反転 供給+ ブロー インデックス
図) コップひっくり返し機 一番遅い 工程を速くすれば 目標サイクルをクリアする事がわかる。 チャート上なら 一目瞭然 である。 だから設計初期にチャートが要る。 ※ 遅いからエアシリンダをロボシリンダに替えます、とかで スペース的に入らなかったら目も当てられませんからね。 目標 6.5秒 反転 ★ 当たらないなら 次のサイクルで やればいい ★
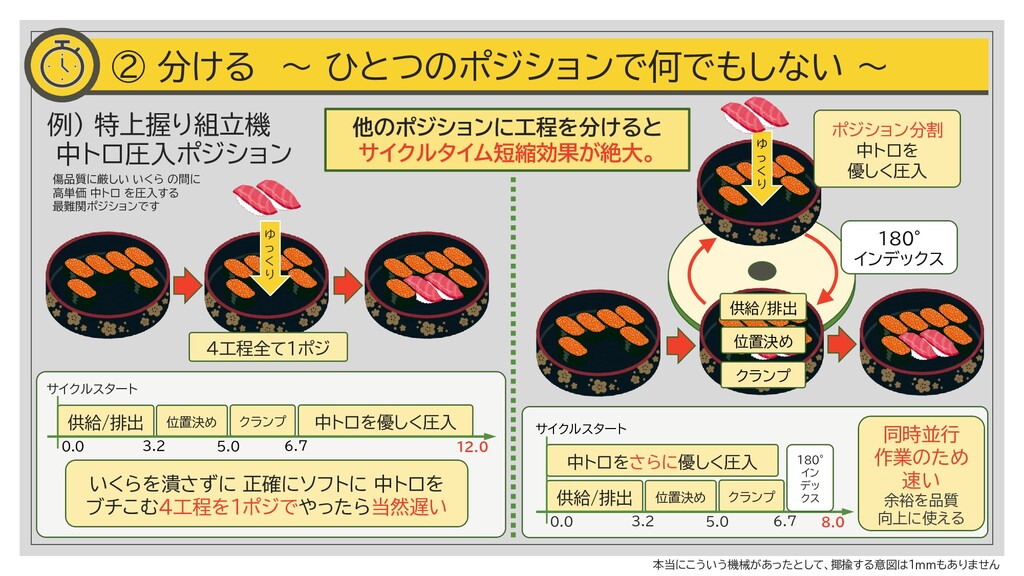
② 分ける ~ ひとつのポジションで何でもしない ~ 供給/排出 他のポジションに工程を分けると サイクルタイム短縮効果が絶大。 位置決め クランプ
ゆ っ く り 中トロを優しく圧入 いくらを潰さずに 正確にソフトに 中トロを ブチこむ4工程を1ポジでやったら当然遅い ゆ っ く り 0.0 サイクルスタート 3.2 5.0 6.7 12.0 供給/排出 位置決め クランプ ポジション分割 中トロを 優しく圧入 180° インデックス 例) 特上握り組立機 中トロ圧入ポジション 供給/排出 位置決め クランプ 中トロをさらに優しく圧入 0.0 サイクルスタート 3.2 5.0 6.7 8.0 180° イン デッ クス 同時並行 作業のため 速い 余裕を品質 向上に使える 4工程全て1ポジ 傷品質に厳しい いくら の間に 高単価 中トロ を圧入する 最難関ポジションです 本当にこういう機械があったとして、揶揄する意図は1mmもありません
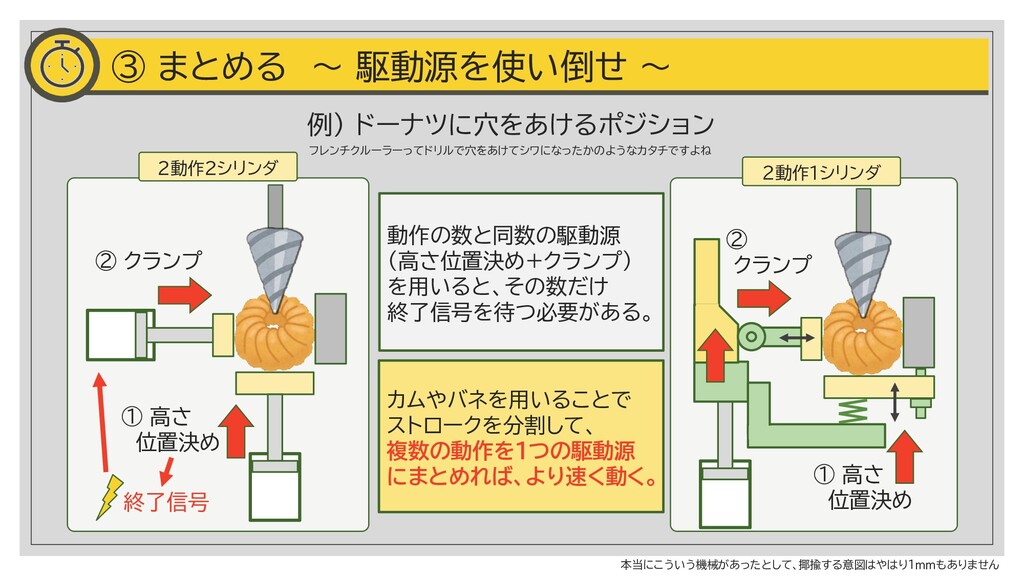
① 高さ 位置決め ③ まとめる ~ 駆動源を使い倒せ ~ ② クランプ
例) ドーナツに穴をあけるポジション 終了信号 ① 高さ 位置決め ② クランプ カムやバネを用いることで ストロークを分割して、 複数の動作を1つの駆動源 にまとめれば、より速く動く。 2動作2シリンダ 2動作1シリンダ 動作の数と同数の駆動源 (高さ位置決め+クランプ) を用いると、その数だけ 終了信号を待つ必要がある。 本当にこういう機械があったとして、揶揄する意図はやはり1mmもありません フレンチクルーラーってドリルで穴をあけてシワになったかのようなカタチですよね
④ 削り倒す 削り倒す相手 は サイクルネックの 1mm 1g そこが 「神が宿る細部」 頑張って削った
1mm 1g は 「競争力」 に化ける! サイクルネックを削らずに、他を先に削っても、その設計に意義は無い! ※ サイクルネック以外を削る時間が有り余っていればお好きにどうぞ。
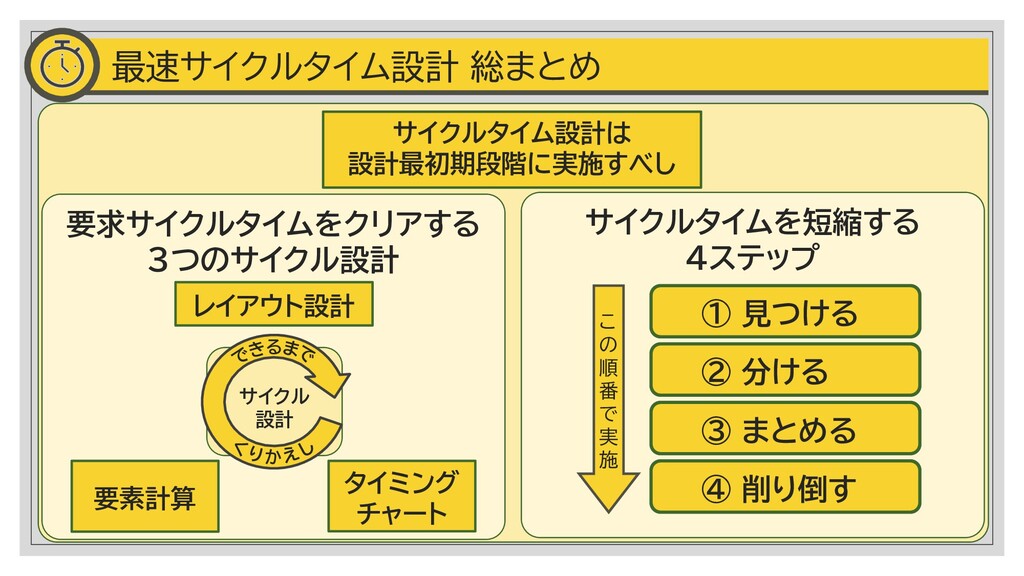
サイクルタイムを短縮する 4ステップ 要求サイクルタイムをクリアする 3つのサイクル設計 最速サイクルタイム設計 総まとめ サイクル 設計 る か
サイクルタイム設計は 設計最初期段階に実施すべし 要素計算 タイミング チャート レイアウト設計 ① 見つける ② 分ける ③ まとめる ④ 削り倒す こ の 順 番 で 実 施
著者紹介 4エンジン合計で18000馬力 新明和工業製 US-2 救難飛行艇 図) 嬉しいけど疲れてグリコポーズになってない著者 図) 内容が悔しくてグリコしてない著者 宗澤
健一 (むねざわ けんいち) Twitter:@Engineer_MUNE ・院卒(機械工学)→ 機械系技術者な トライアスリート6年生/サイクリスト23年生 ・嫁に出会って3日目でプロポーズ (長野県 婚活最速記録) ◇略歴 2010- 日本精工 自動機の開発(内製) 2014- 新明和工業 US-2救難飛行艇 主エンジン他動力系担当 2015- ミネベアミツミ 自動機の開発(内製) 2020 技術士第一次試験合格 (機械部門) 2021- 長野県にてエンジニアリング業(外販)に従事 お仕事のご依頼お待ちしております! ゴールインマーク(グリコポーズ) は 江崎グリコ株式会社様の商標 です。純粋にネタであり、著者との関係性はありません。ちなみに私は本気でグリコポーズでゴールしようと努力しています。
ご清聴ありがとうございました! ご質問・ご依頼 は以下まで Twitter:@Engineer_MUNE 第4回FA設備技術勉強会 #FA_Study ゴールインマーク(グリコポーズ)は 江崎グリコ株式会社 様の商標です。 純粋にネタであり、著者との関係性はありません。
ちなみに私はビスコとアイスの実が大好きです。 承諾無しの二次配布/切取引用を禁じます
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}