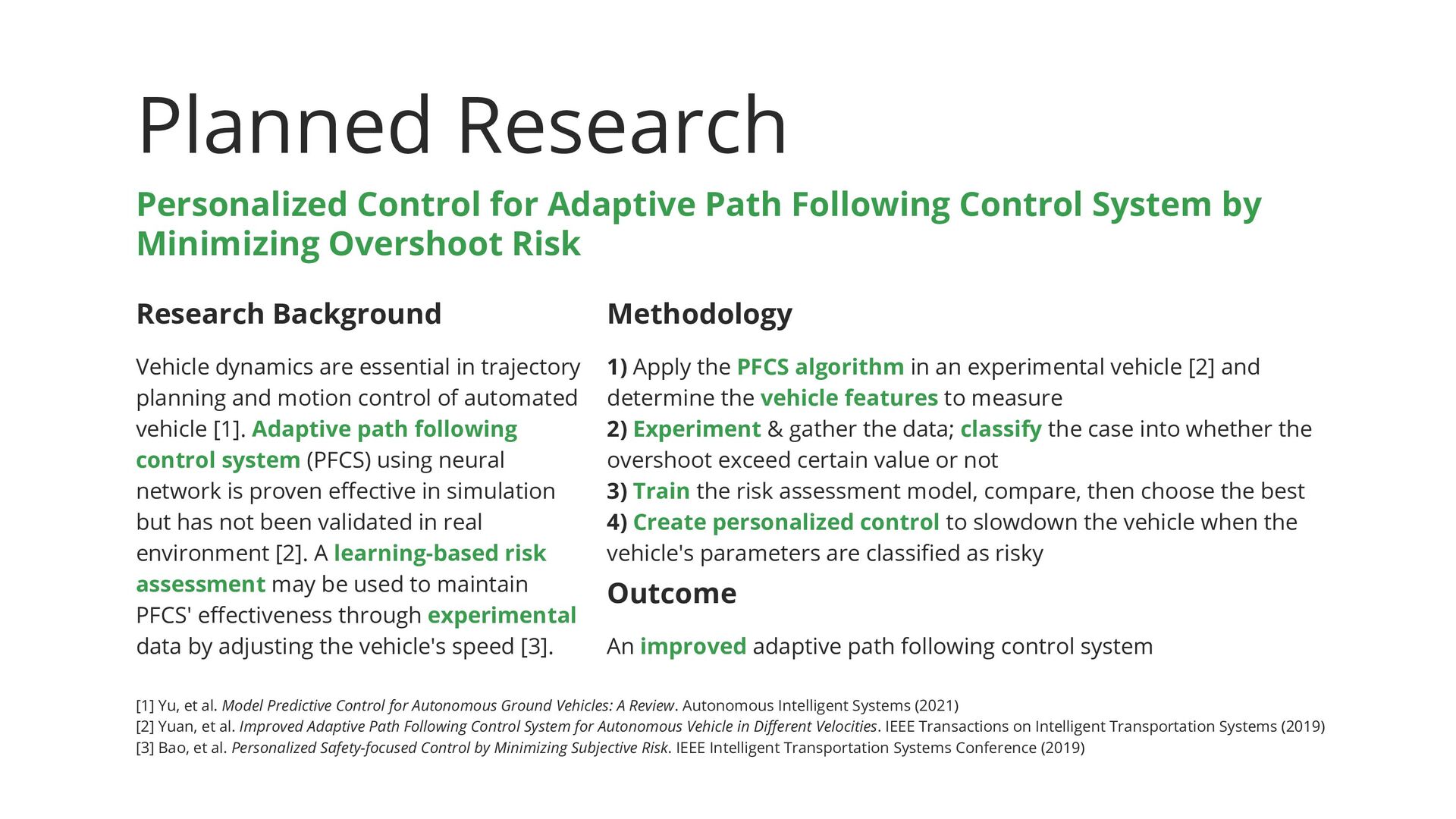
by Minimizing Overshoot Risk Research Background Vehicle dynamics are essential in trajectory planning and motion control of automated vehicle [1]. Adaptive path following control system (PFCS) using neural network is proven effective in simulation but has not been validated in real environment [2]. A learning-based risk assessment may be used to maintain PFCS' effectiveness through experimental data by adjusting the vehicle's speed [3]. [1] Yu, et al. Model Predictive Control for Autonomous Ground Vehicles: A Review. Autonomous Intelligent Systems (2021) [2] Yuan, et al. Improved Adaptive Path Following Control System for Autonomous Vehicle in Different Velocities. IEEE Transactions on Intelligent Transportation Systems (2019) [3] Bao, et al. Personalized Safety-focused Control by Minimizing Subjective Risk. IEEE Intelligent Transportation Systems Conference (2019) Methodology 1) Apply the PFCS algorithm in an experimental vehicle [2] and determine the vehicle features to measure 2) Experiment & gather the data; classify the case into whether the overshoot exceed certain value or not 3) Train the risk assessment model, compare, then choose the best 4) Create personalized control to slowdown the vehicle when the vehicle's parameters are classified as risky Outcome An improved adaptive path following control system
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}