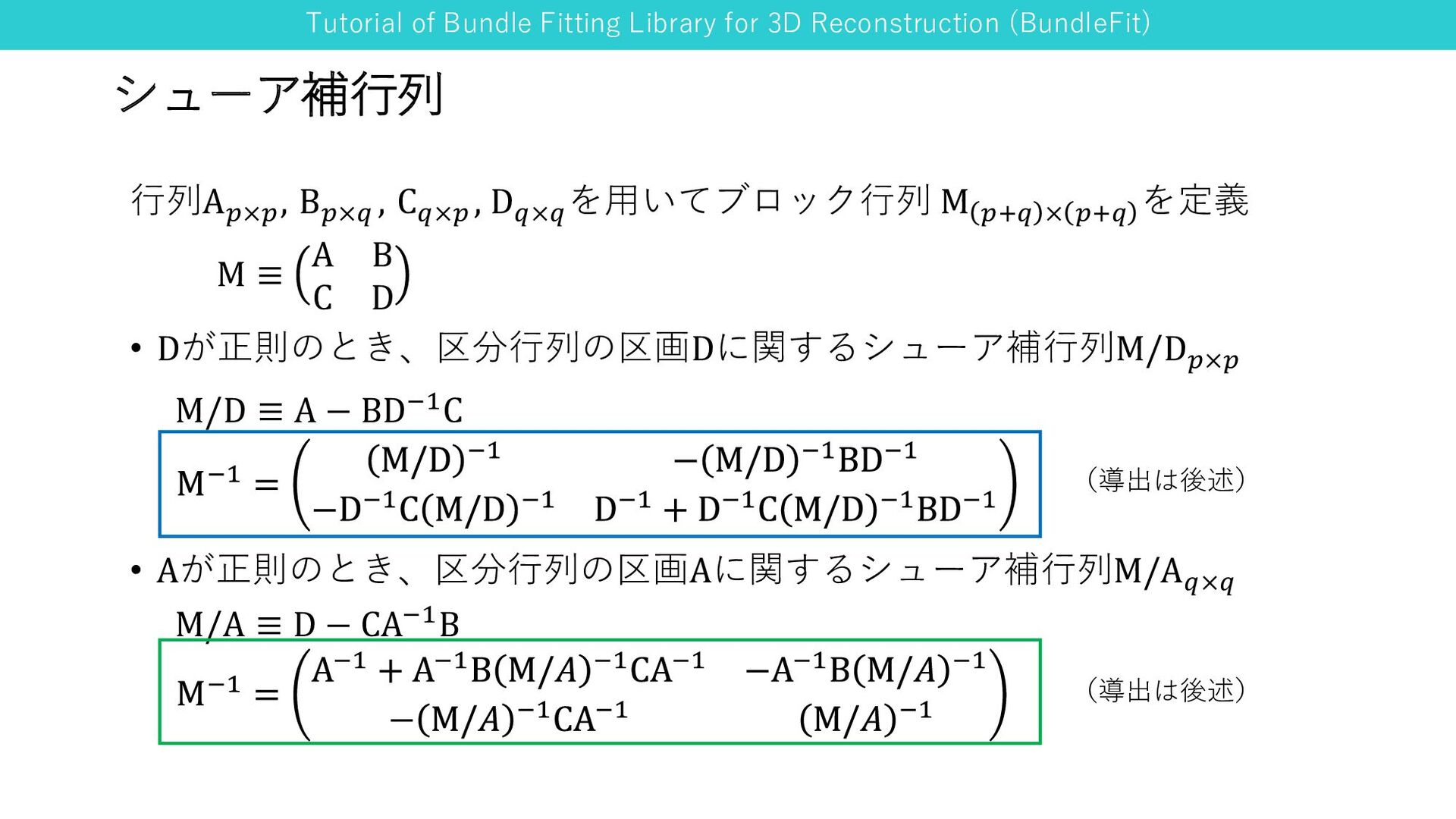
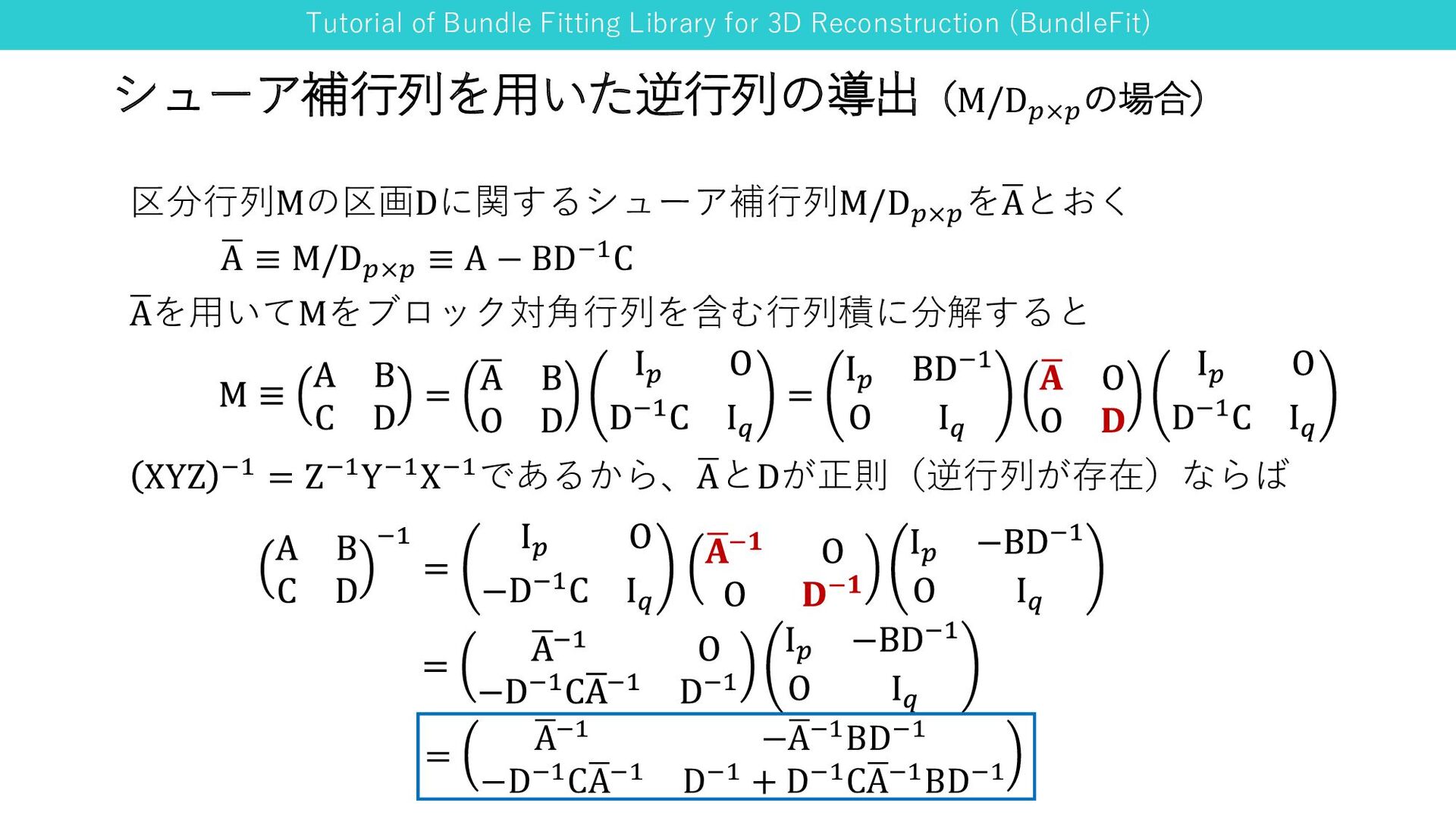
≡ A B C D = ഥ A B Ο D I𝑝 Ο D−1C I𝑞 = I𝑝 BD−1 Ο I𝑞 ഥ 𝐀 Ο Ο 𝐃 I𝑝 Ο D−1C I𝑞 区分行列Mの区画Dに関するシューア補行列M/D𝑝×𝑝 をഥ Aとおく ഥ Aを用いてMをブロック対角行列を含む行列積に分解すると XYZ −1 = Z−1Y−1X−1であるから、ഥ AとDが正則(逆行列が存在)ならば シューア補行列を用いた逆行列の導出(M/D𝑝×𝑝 の場合) ഥ A ≡ M/D𝑝×𝑝 ≡ A − BD−1C A B C D −1 = I𝑝 Ο −D−1C I𝑞 ഥ 𝐀−𝟏 Ο Ο 𝐃−𝟏 I𝑝 −BD−1 Ο I𝑞 = ഥ A−1 Ο −D−1Cഥ A−1 D−1 I𝑝 −BD−1 Ο I𝑞 = ഥ A−1 −ഥ A−1BD−1 −D−1Cഥ A−1 D−1 + D−1Cഥ A−1BD−1
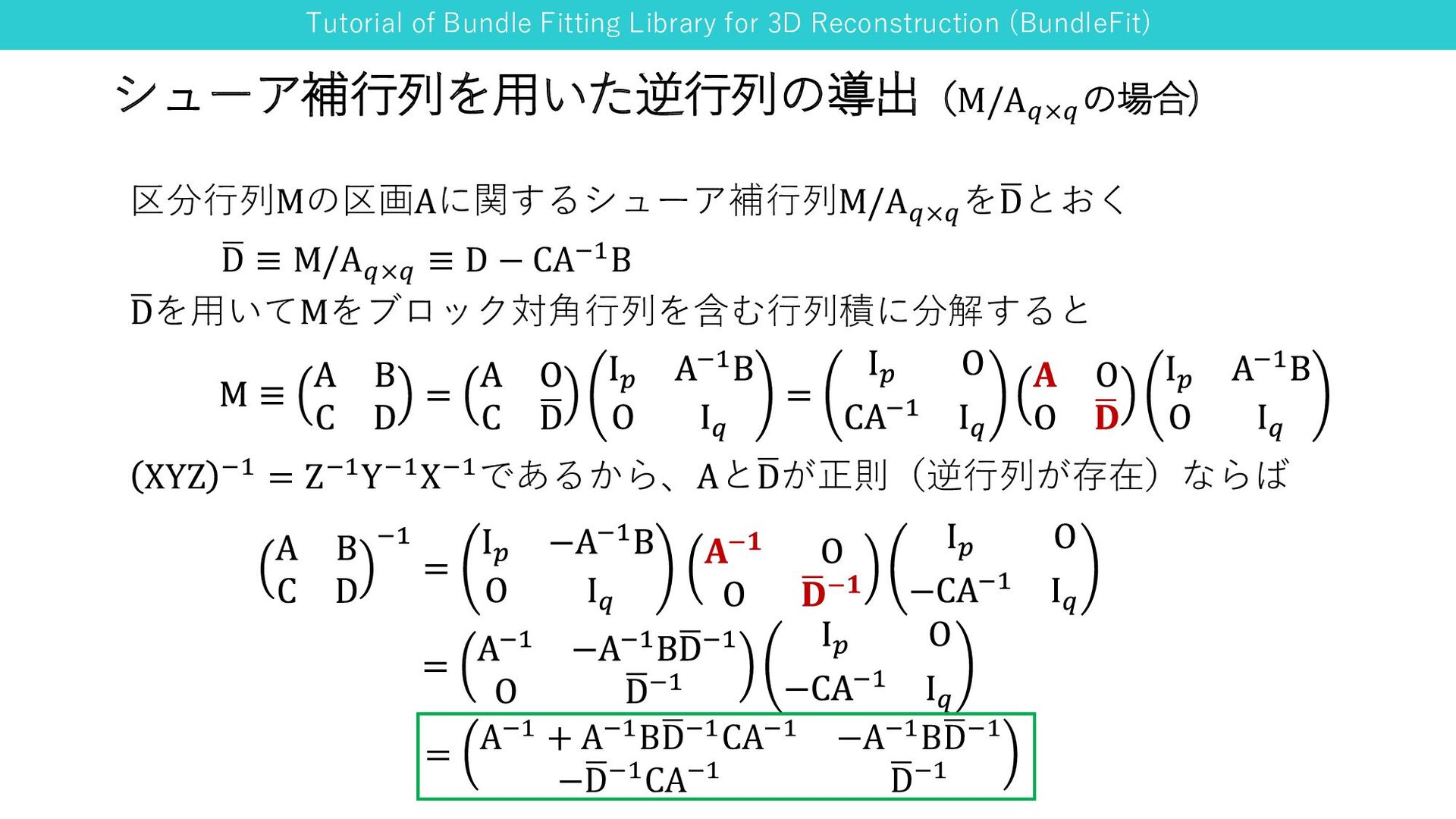
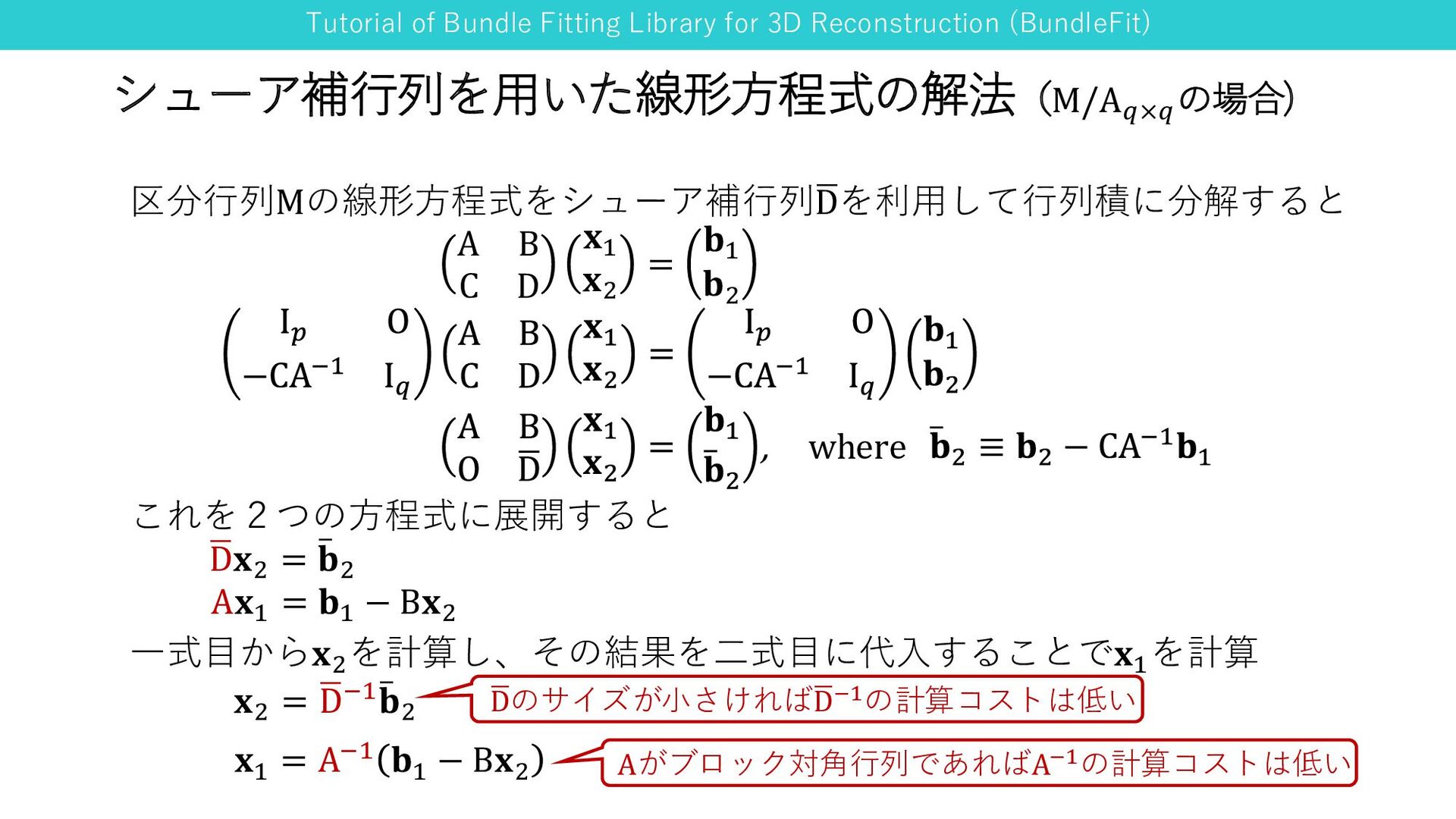
をഥ Dとおく ഥ Dを用いてMをブロック対角行列を含む行列積に分解すると XYZ −1 = Z−1Y−1X−1であるから、Aとഥ Dが正則(逆行列が存在)ならば シューア補行列を用いた逆行列の導出(M/A𝑞×𝑞 の場合) M ≡ A B C D = A Ο C ഥ D I𝑝 A−1B Ο I𝑞 = I𝑝 Ο CA−1 I𝑞 𝐀 Ο Ο ഥ 𝐃 I𝑝 A−1B Ο I𝑞 A B C D −1 = I𝑝 −A−1B Ο I𝑞 𝐀−𝟏 Ο Ο ഥ 𝐃−𝟏 I𝑝 Ο −CA−1 I𝑞 = A−1 −A−1Bഥ D−1 Ο ഥ D−1 I𝑝 Ο −CA−1 I𝑞 = A−1 + A−1Bഥ D−1CA−1 −A−1Bഥ D−1 −ഥ D−1CA−1 ഥ D−1 ഥ D ≡ M/A𝑞×𝑞 ≡ D − CA−1B
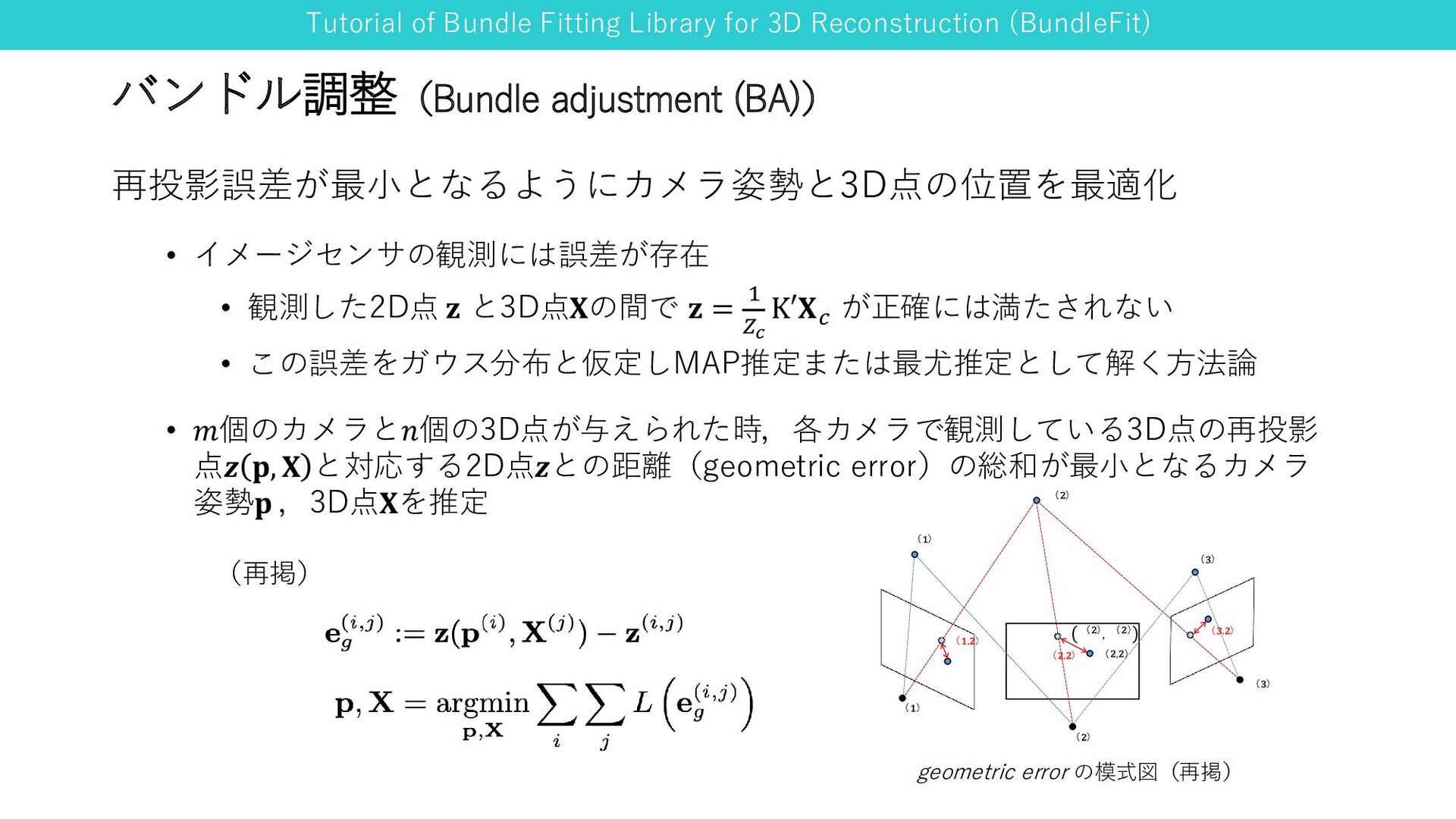
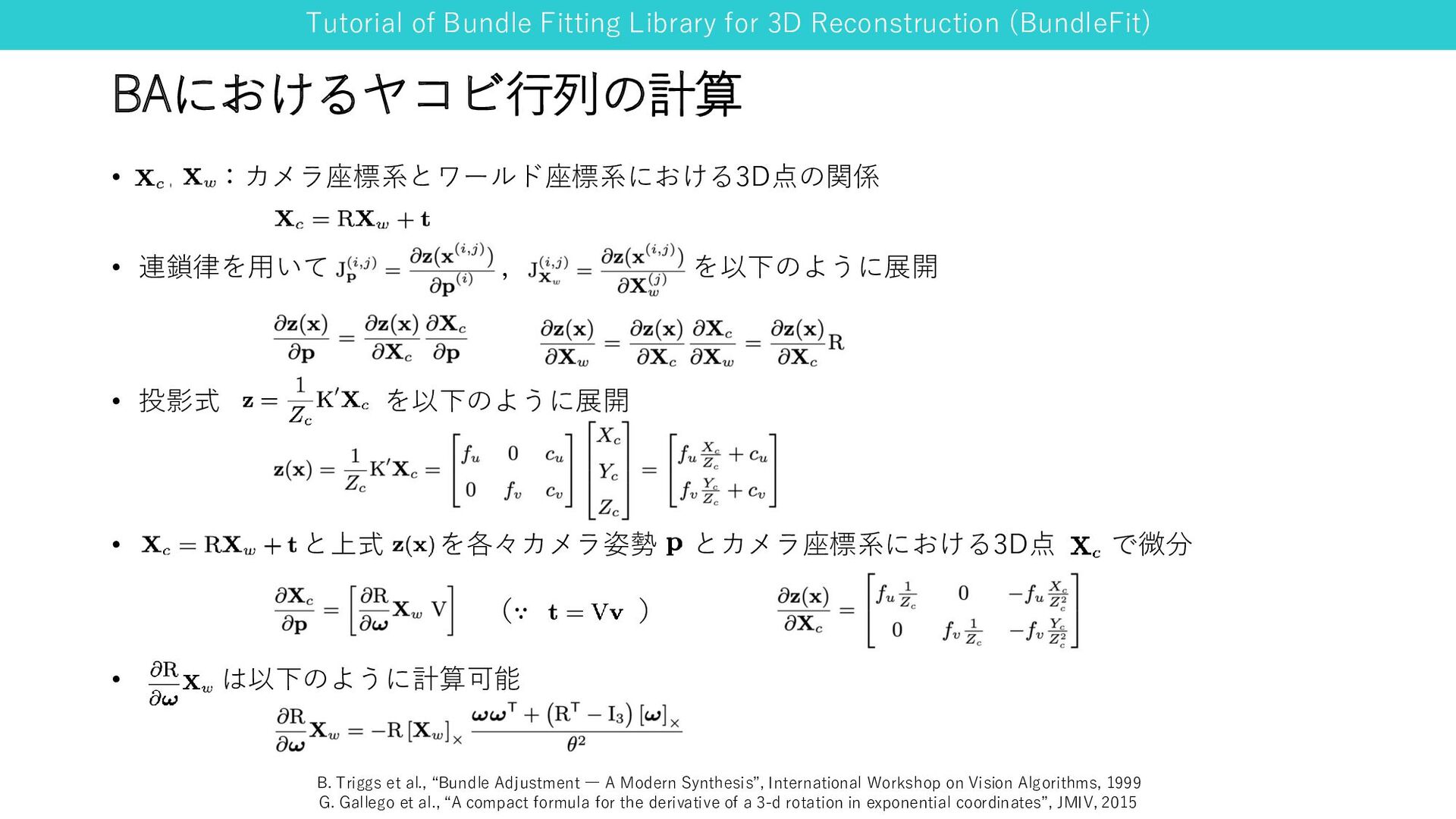
• , :カメラ座標系とワールド座標系における3D点の関係 • 連鎖律を用いて , を以下のように展開 • 投影式 を以下のように展開 • と上式 を各々カメラ姿勢 とカメラ座標系における3D点 で微分 • は以下のように計算可能 (∵ ) B. Triggs et al., “Bundle Adjustment ― A Modern Synthesis”, International Workshop on Vision Algorithms, 1999 G. Gallego et al., “A compact formula for the derivative of a 3-d rotation in exponential coordinates”, JMIV, 2015
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}