i. 同一データでも入力順によって反応が変わる ii. BPTT(Back propagation through time) 1. 誤差を時系列と逆方向にも 伝搬する iii. RTRL (Real Time Recurrent Learning) 1. 誤差を時系列方向にも伝搬する ( オンライン処理向き ) iv. 重みの伝搬やノイズ、記憶の取捨選択など、問題が山積み b. ElmanN( 中間層→中間層の結合を持つ ) 、 LSTM(Long short-term memory) など
相互接続した中間層に時系列データを適用し、その後教師データに線形回帰する 3. 時間軸を持たせて FFNN に流し込んでしまう方法 a. TDNN(Time delay neural network) i. 時間軸を持たせる場合、長さの違いやずれを吸収する仕組みが必要 ii. ディレイを中間層でスケールすることで差異を吸収する
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
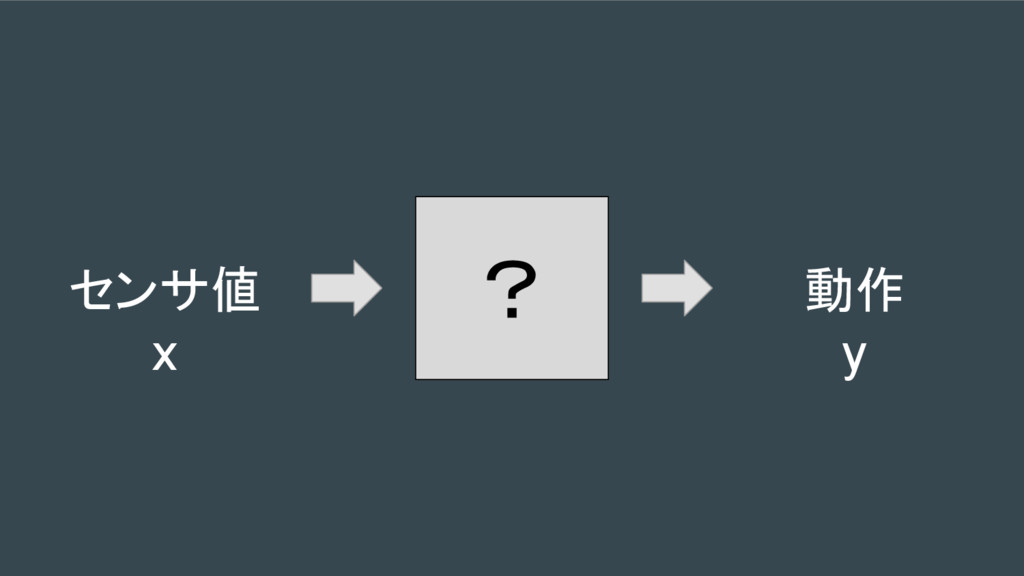
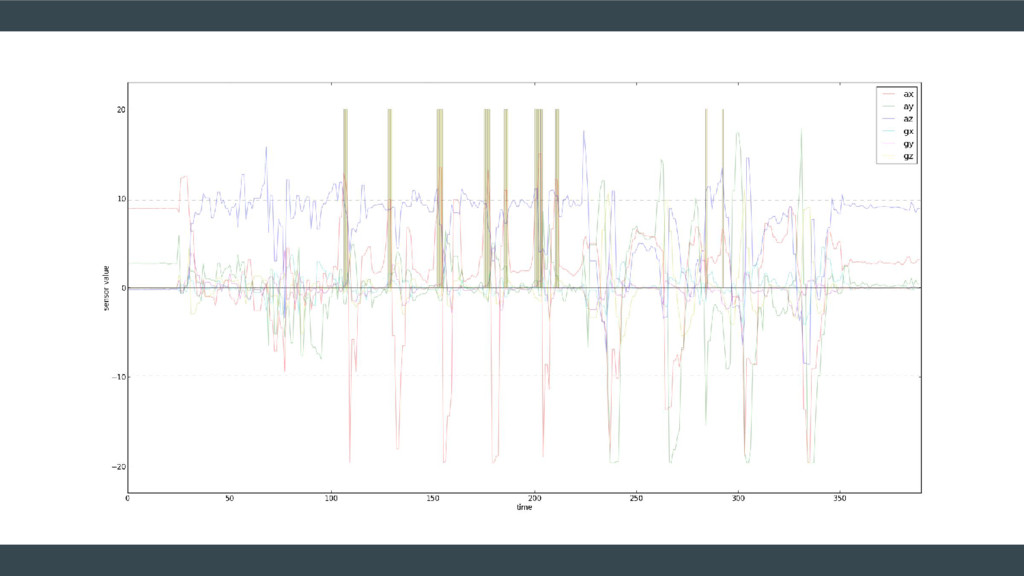
![? センサ値 x 動作(OHV) y int[3] [ a, b, c](https://files.speakerdeck.com/presentations/60607404db684105849e2920865d83c0/slide_11.jpg){kind=link}
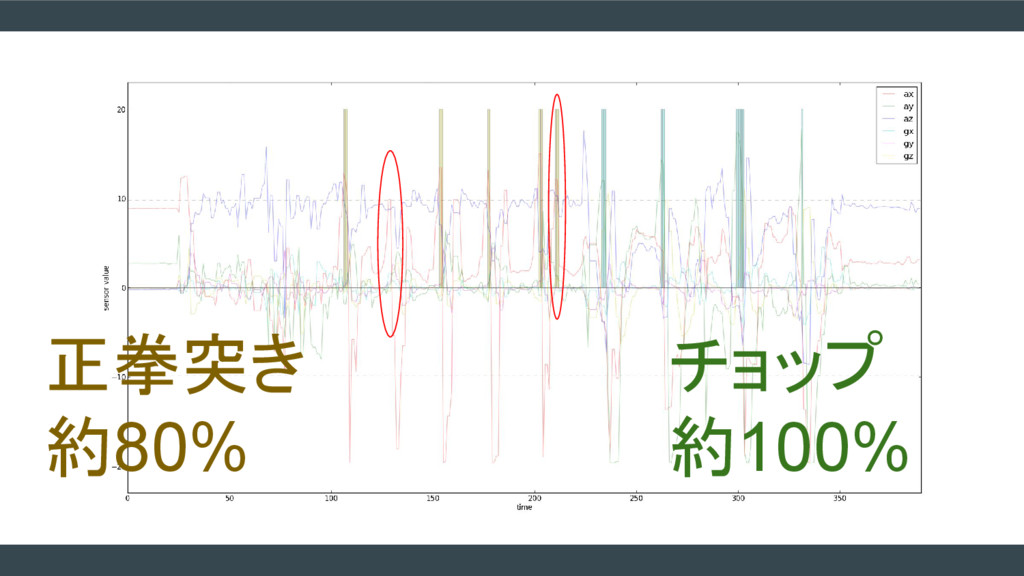
![センサ値 x 動作(OHV) y int[3] [ a, b, c ]](https://files.speakerdeck.com/presentations/60607404db684105849e2920865d83c0/slide_12.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![W1 = tf.Variable(tf.truncated_normal([6, 24], stddev=0.1), name="weight1") b1 = tf.Variable(tf.constant(0.1, shape=[24]),](https://files.speakerdeck.com/presentations/60607404db684105849e2920865d83c0/slide_31.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}