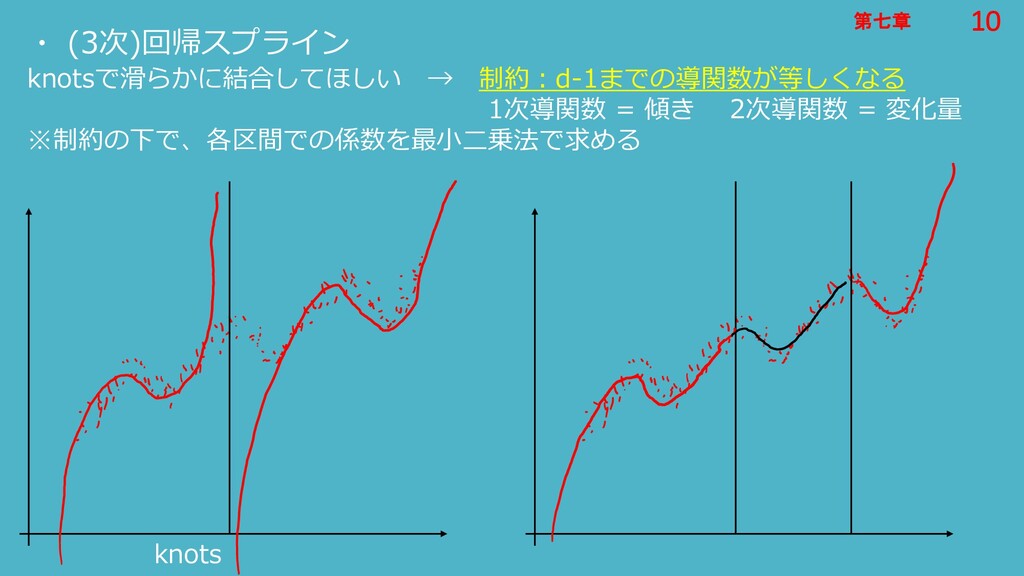
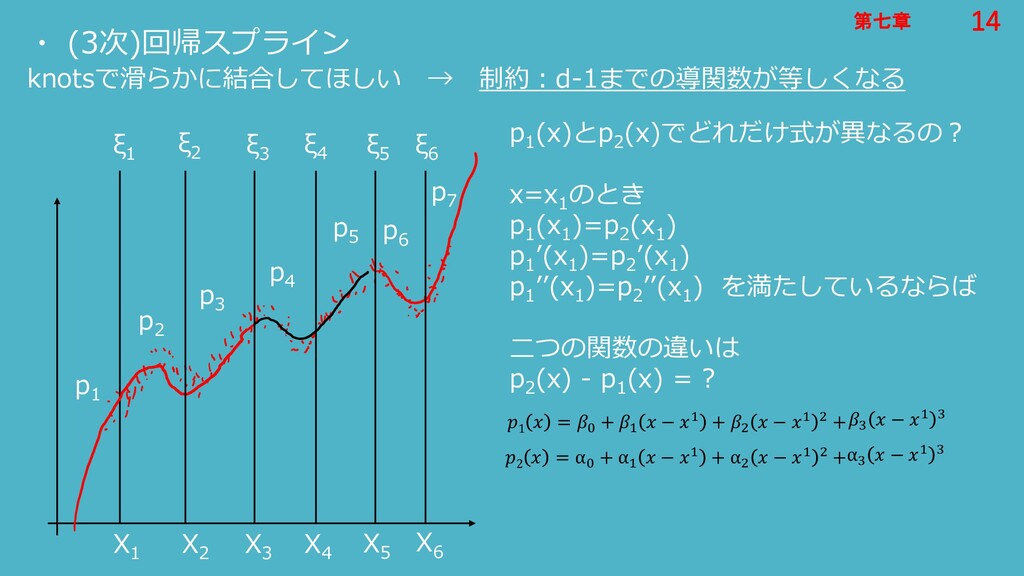
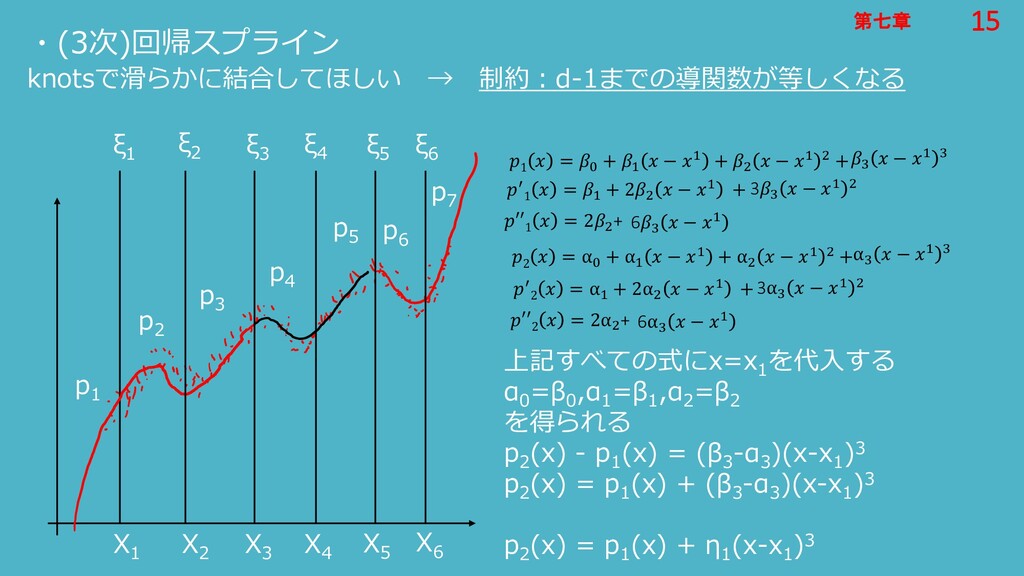
全体の関数をP(x) 各区間でn+1個のp(x)が存在 p1(x)とp2(x)の交わるξ1では、 制約: ・交点P(x), ・一次導関数P’(x), ・二次導関数P’’(x) が等しい ξ 1 ξ 2 ξ 3 ξ 4 ξ 5 ξ 6 X 1 X 2 X 3 X 4 X 5 X 6 p 1 p 2 p 3 p 4 p 5 p 6 p 7
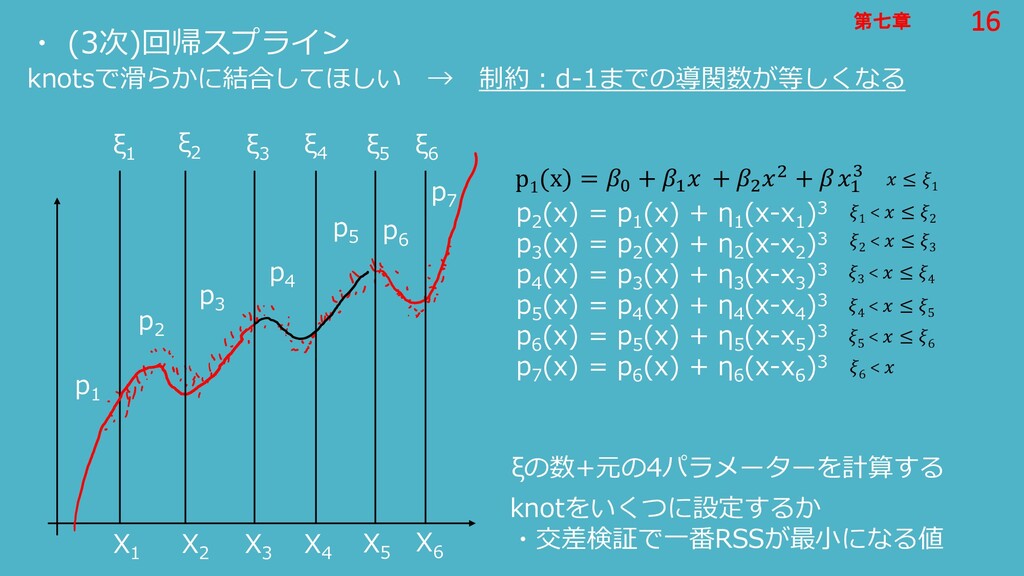
1 ξ 2 ξ 3 ξ 4 ξ 5 ξ 6 X 1 X 2 X 3 X 4 X 5 X 6 p 1 p 2 p 3 p 4 p 5 p 6 p 7 p 2 (x) = p 1 (x) + η 1 (x-x 1 )3 p 3 (x) = p 2 (x) + η 2 (x-x 2 )3 p 4 (x) = p 3 (x) + η 3 (x-x 3 )3 p 5 (x) = p 4 (x) + η 4 (x-x 4 )3 p 6 (x) = p 5 (x) + η 5 (x-x 5 )3 p 7 (x) = p 6 (x) + η 6 (x-x 6 )3 ≤ 1 p 1 (x) = 0 + 1 + 2 2 + 1 3 1 < ≤ 2 6 < 5 < ≤ 6 4 < ≤ 5 3 < ≤ 4 2 < ≤ 3 ξの数+元の4パラメーターを計算する knotをいくつに設定するか ・交差検証で一番RSSが最小になる値
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}