Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
Regularizations of Inverse Problems
Search
Samuel Vaiter
September 06, 2013
Science
50
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
Regularizations of Inverse Problems
GRETSI'13, Quartz, Brest, September 2013.
Samuel Vaiter
September 06, 2013
More Decks by Samuel Vaiter
See All by Samuel Vaiter
Low Complexity Regularizations: A ''Localization'' Result
svaiter
0
75
A First Look at Proximal Methods
svaiter
0
230
Fast Distributed Total Variation
svaiter
0
120
Low Complexity Regularizations: A Localization Result
svaiter
0
78
Low Complexity Regularizations: a Localization Result
svaiter
0
130
Model Selection with Partly Smooth Functions
svaiter
0
49
Low Complexity Models: Robustness
svaiter
0
80
Low Complexity Models: Robustness and Sensivity
svaiter
0
41
Recovery Guarantees for Low Complexity Models
svaiter
1
80
Other Decks in Science
See All in Science
Bear-safety-running
akirun_run
0
170
Utiliser Bitcoin sans Internet
rlifchitz
0
300
あなたに水耕栽培を愛していないとは言わせない
mutsumix
1
360
白金鉱業Vol.21【初学者向け発表枠】身近な例から学ぶ数理最適化の基礎 / Learning the Basics of Mathematical Optimization Through Everyday Examples
brainpadpr
1
760
HDC tutorial
michielstock
2
740
YouTubeにおける撤回論文の参照実態 / metascience-meetup2026
corgies
3
300
HajimetenoLT vol.17
hashimoto_kei
1
240
Van Dare naar Durf
voginip
0
260
データベース04: SQL (1/3) 単純質問 & 集約演算
trycycle
PRO
0
1.5k
Testing the Longevity Bottleneck Hypothesis
chinson03
0
370
フィードフォワードニューラルネットワークを用いた記号入出力制御系に対する制御器設計 / Controller Design for Augmented Systems with Symbolic Inputs and Outputs Using Feedforward Neural Network
konakalab
0
160
Conwayの法則を"ちゃんと"使うために — 原典でConwayは何を言っていたのか
bonotake
9
5.5k
Featured
See All Featured
Crafting Experiences
bethany
1
220
Designing for Timeless Needs
cassininazir
1
360
The #1 spot is gone: here's how to win anyway
tamaranovitovic
3
1.1k
How to build a perfect <img>
jonoalderson
1
5.8k
End of SEO as We Know It (SMX Advanced Version)
ipullrank
3
4.3k
The Spectacular Lies of Maps
axbom
PRO
1
860
What’s in a name? Adding method to the madness
productmarketing
PRO
24
4.1k
For a Future-Friendly Web
brad_frost
183
10k
Navigating the moral maze — ethical principles for Al-driven product design
skipperchong
2
420
Darren the Foodie - Storyboard
khoart
PRO
3
3.4k
Learning to Love Humans: Emotional Interface Design
aarron
275
41k
Raft: Consensus for Rubyists
vanstee
141
7.6k
Transcript
Régularisation de problèmes inverses Analyse unifiée de la robustesse Samuel
VAITER CNRS, CEREMADE, Université Paris-Dauphine, France Travaux en collaboration avec M. GOLBABAEE, G. PEYRÉ et J. FADILI
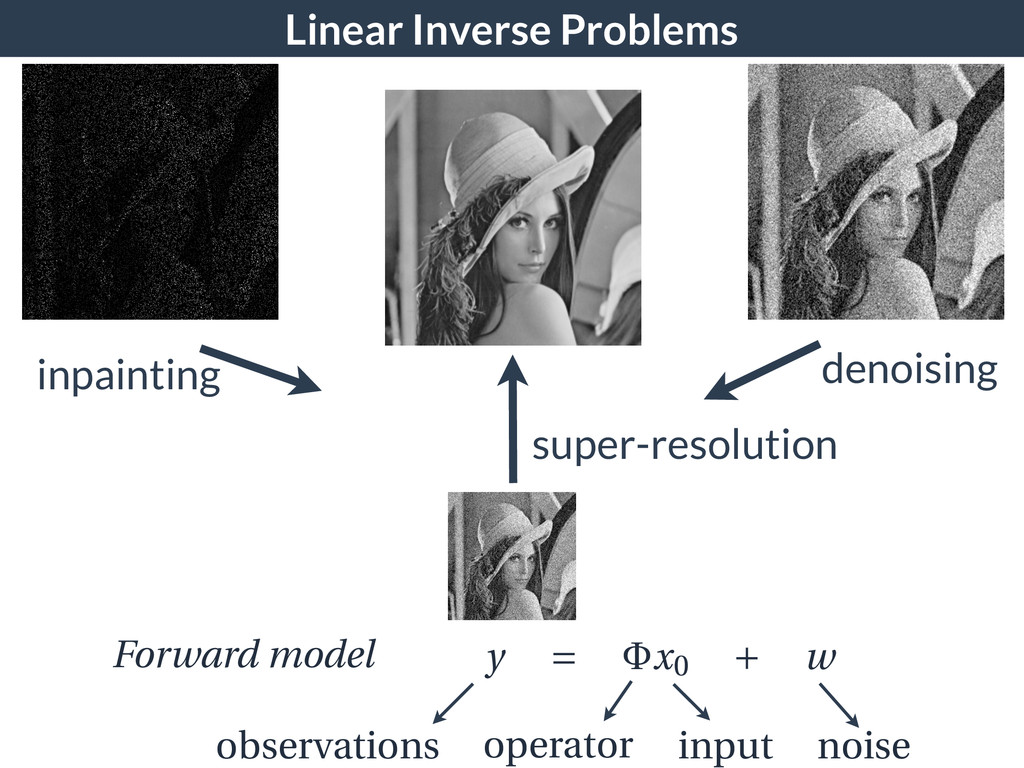
Linear Inverse Problems inpainting denoising super-resolution Forward model y =
x0 + w observations noise input operator
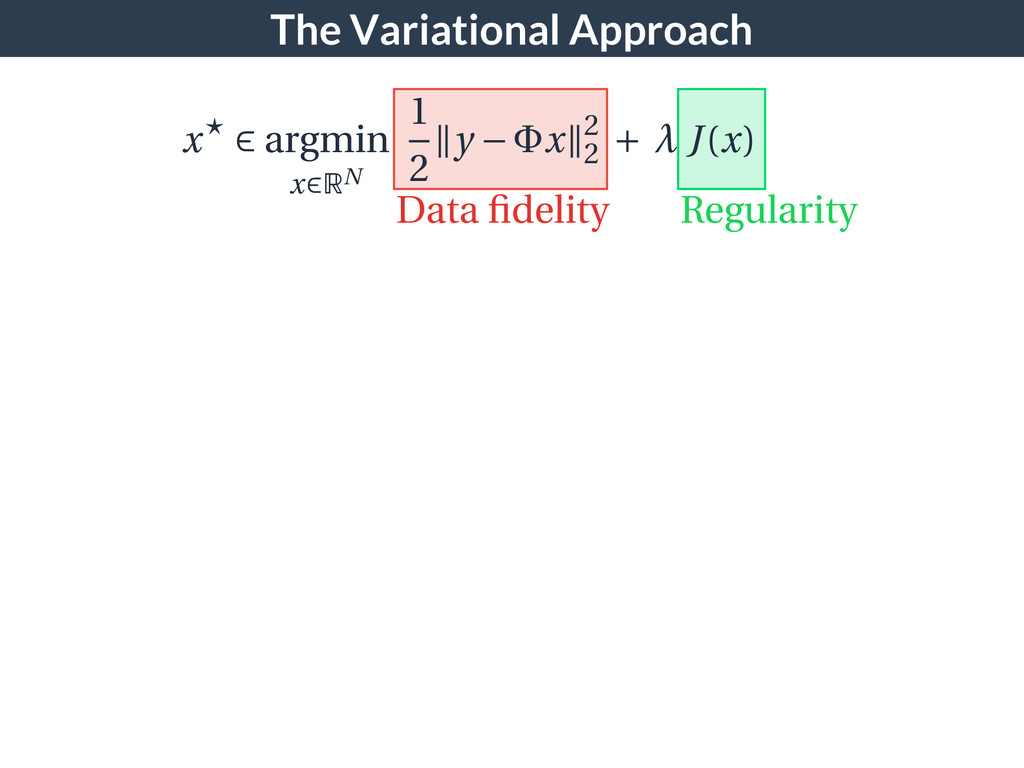
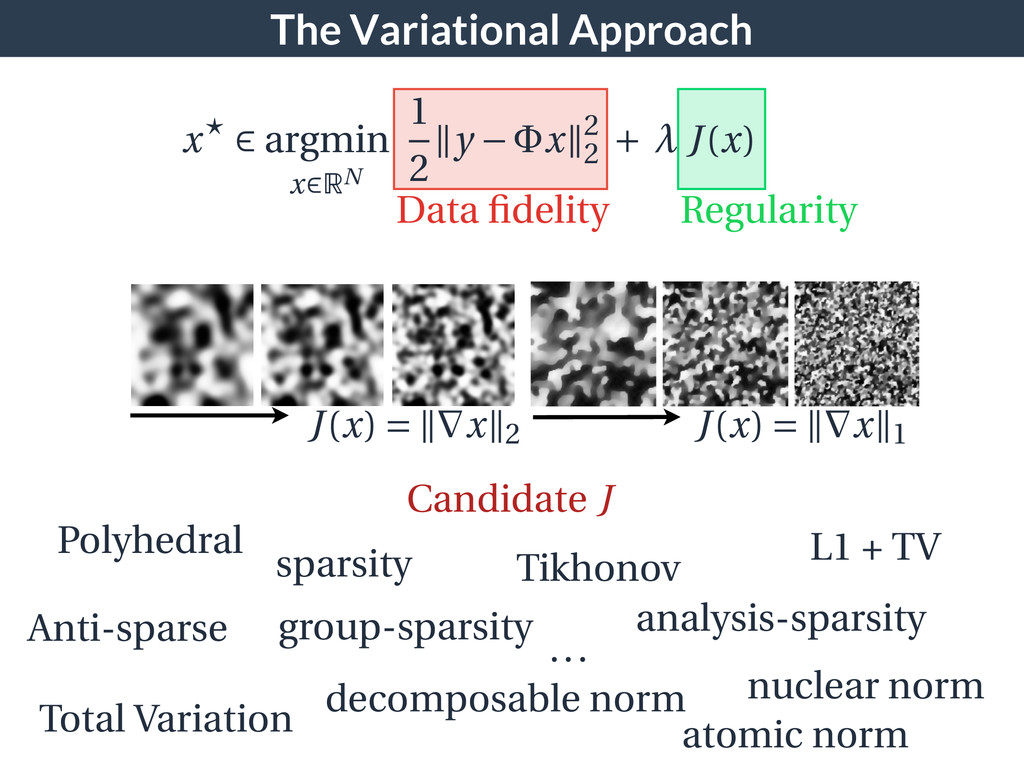
The Variational Approach x argmin x RN 1 2 ||y
x||2 2 + J(x) Data fidelity Regularity
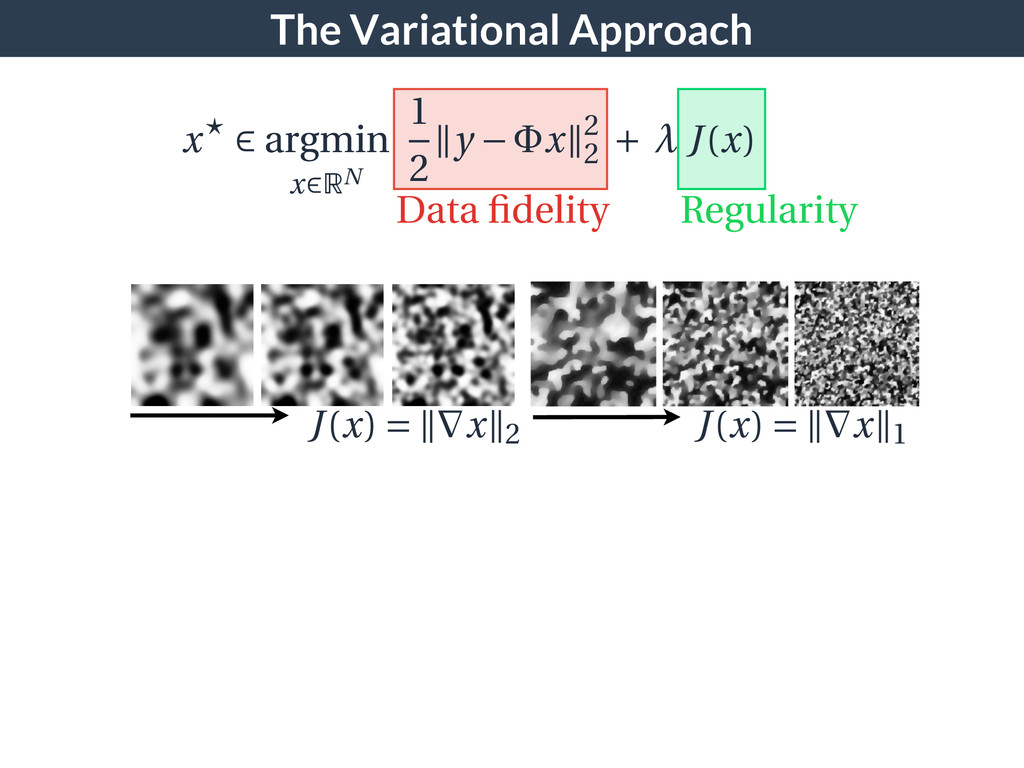
The Variational Approach x argmin x RN 1 2 ||y
x||2 2 + J(x) Data fidelity Regularity J(x) = || x||2 J(x) = || x||1
The Variational Approach x argmin x RN 1 2 ||y
x||2 2 + J(x) Data fidelity Regularity J(x) = || x||2 J(x) = || x||1 sparsity analysis-sparsity group-sparsity nuclear norm Tikhonov Total Variation Anti-sparse Polyhedral L1 + TV ... atomic norm decomposable norm Candidate J
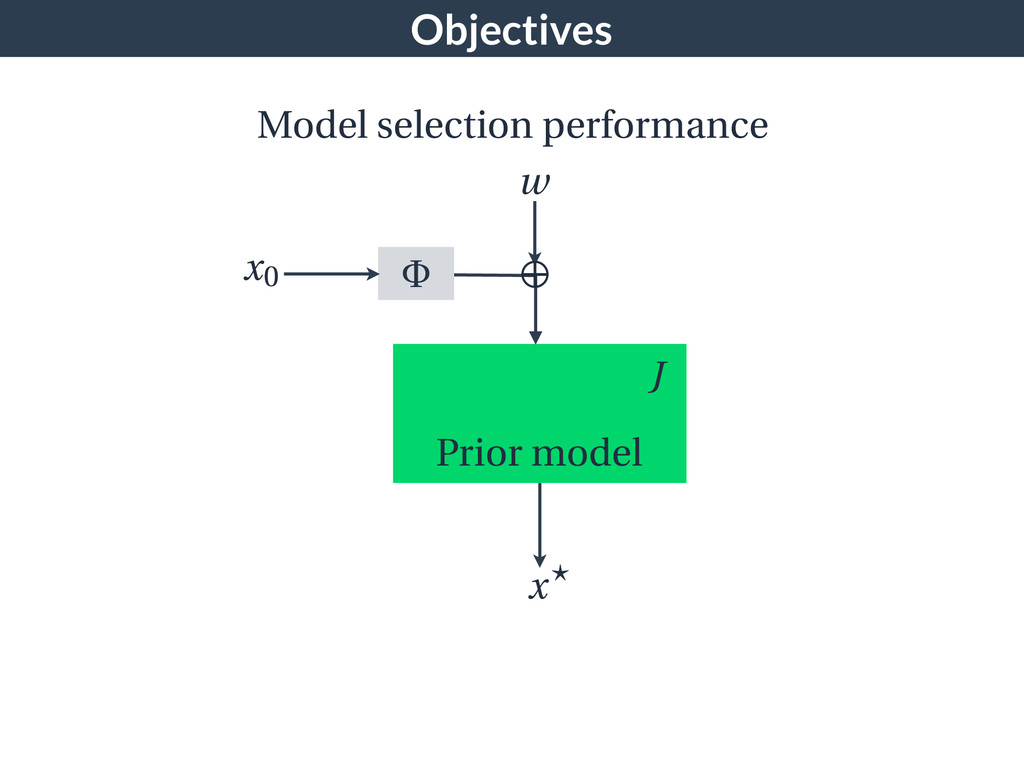
Objectives Model selection performance x0 x w Prior model J
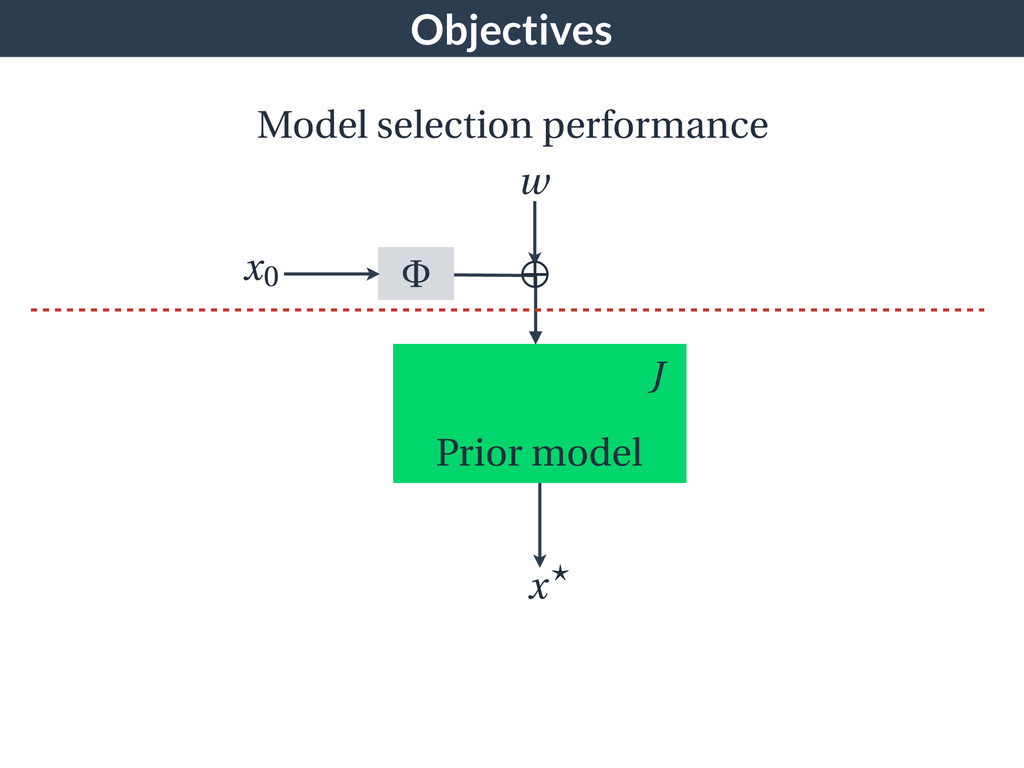
Objectives Model selection performance x0 x w Prior model J
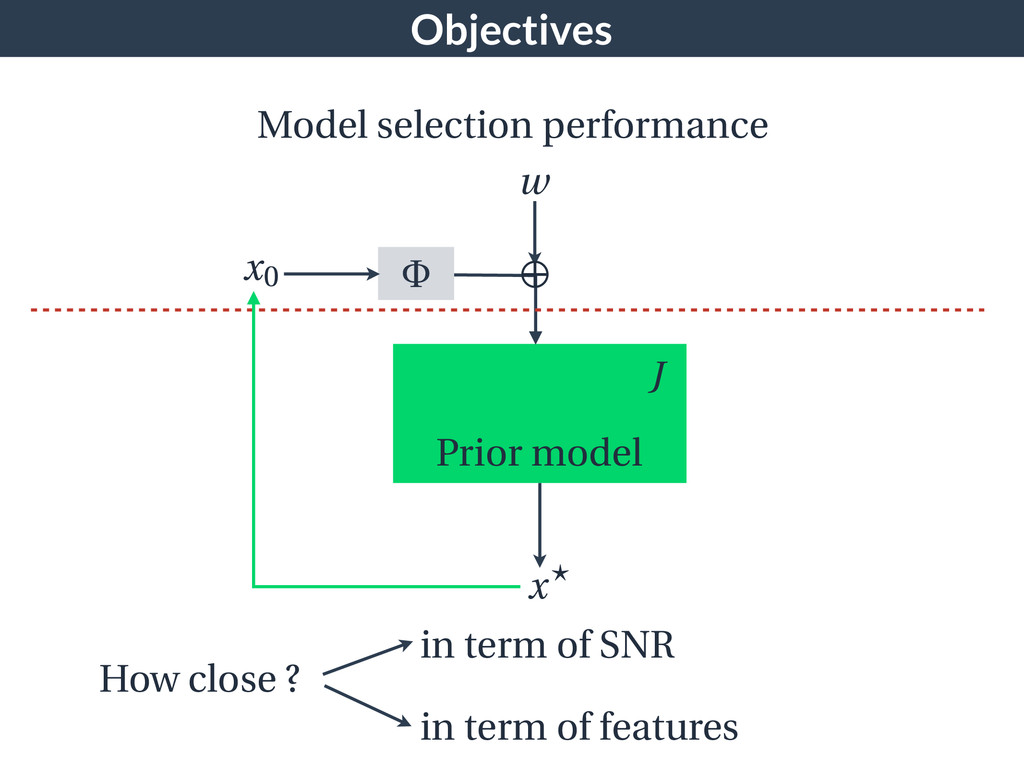
Objectives Model selection performance x0 x w Prior model J
How close ? in term of SNR in term of features
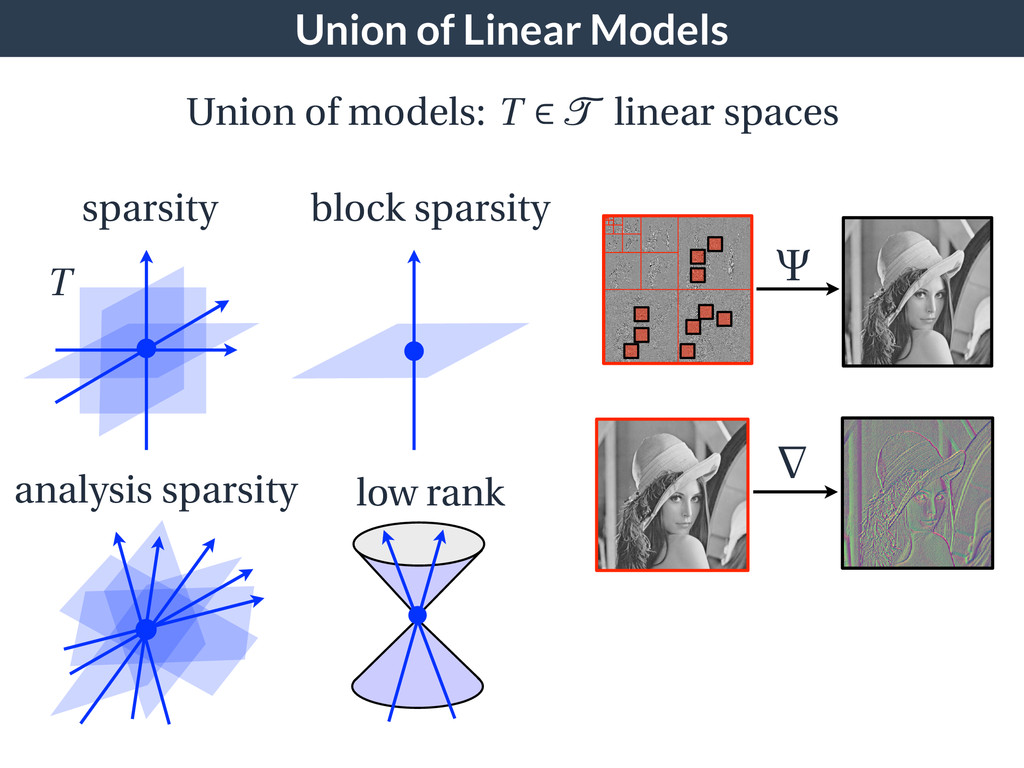
Union of Linear Models Union of models: T T linear
spaces
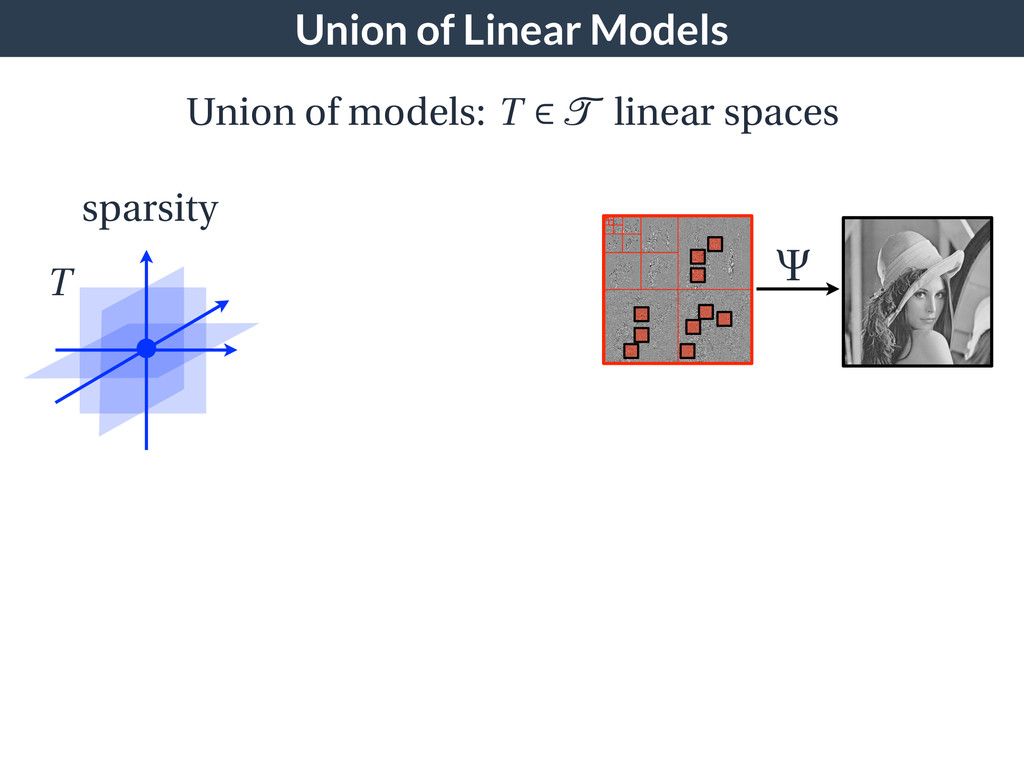
Union of Linear Models Union of models: T T linear
spaces T sparsity
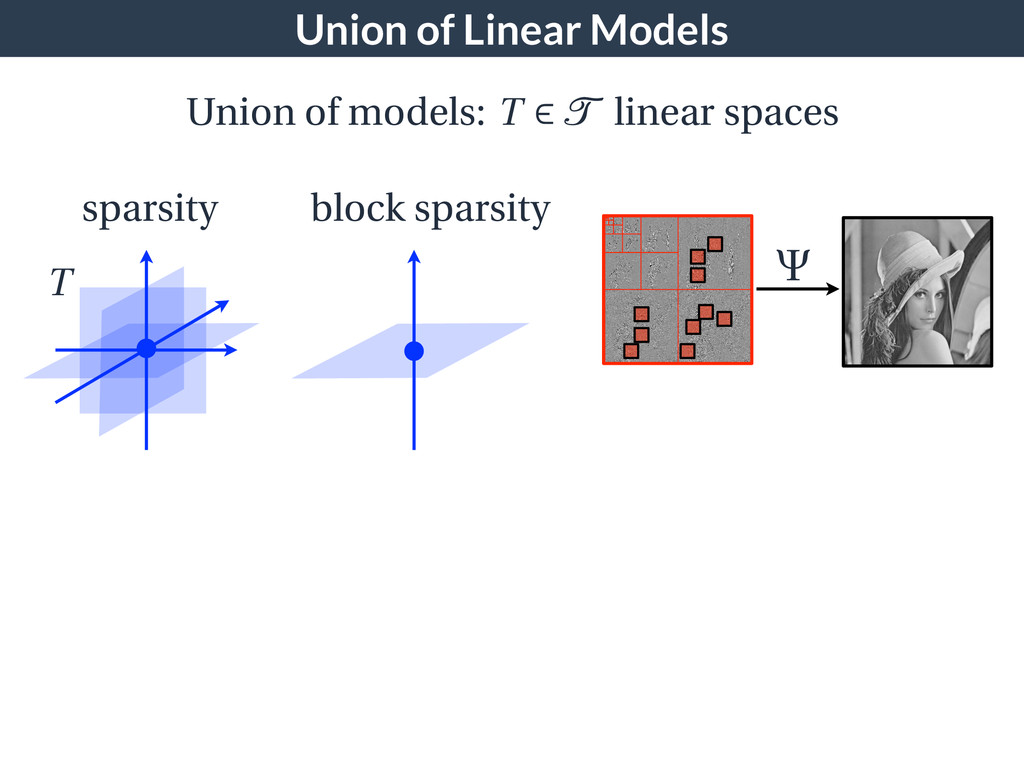
Union of Linear Models Union of models: T T linear
spaces block sparsity T sparsity
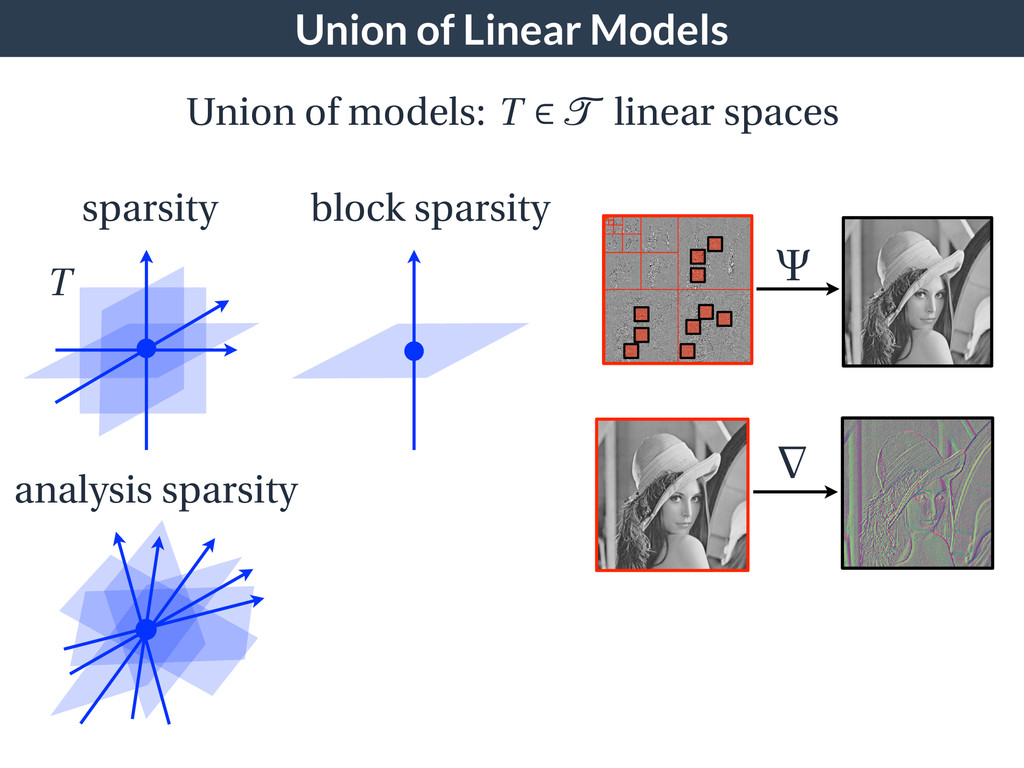
Union of Linear Models Union of models: T T linear
spaces block sparsity T sparsity analysis sparsity
Union of Linear Models Union of models: T T linear
spaces block sparsity low rank T sparsity analysis sparsity
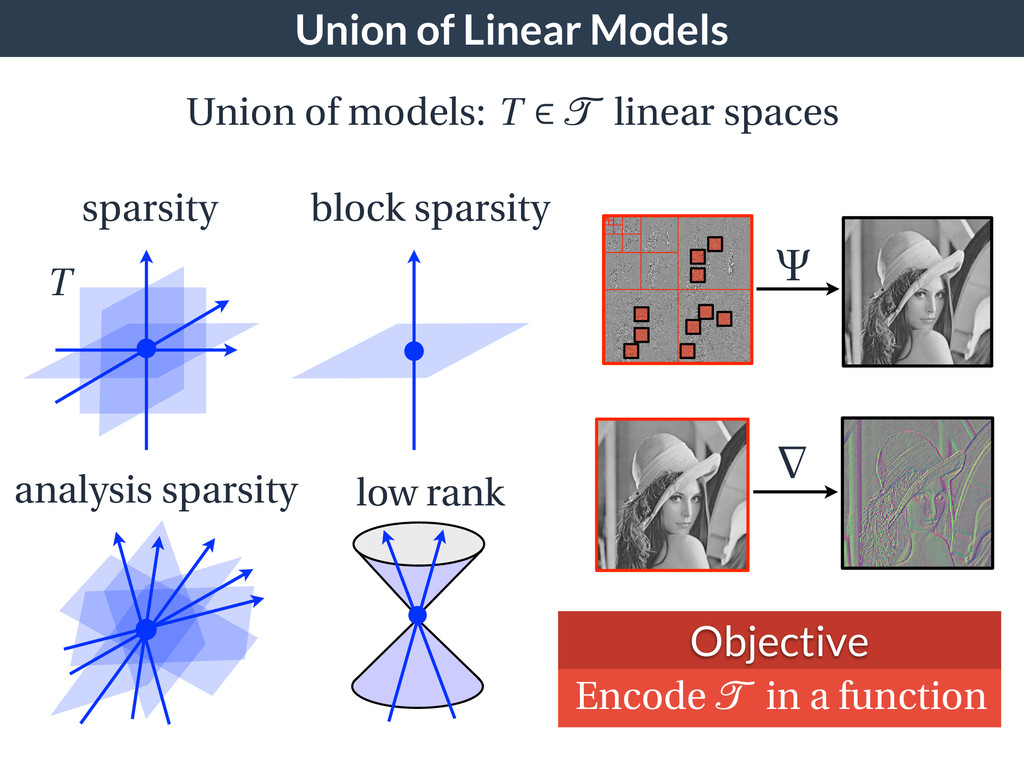
Union of Linear Models Union of models: T T linear
spaces block sparsity low rank Objective Encode T in a function T sparsity analysis sparsity
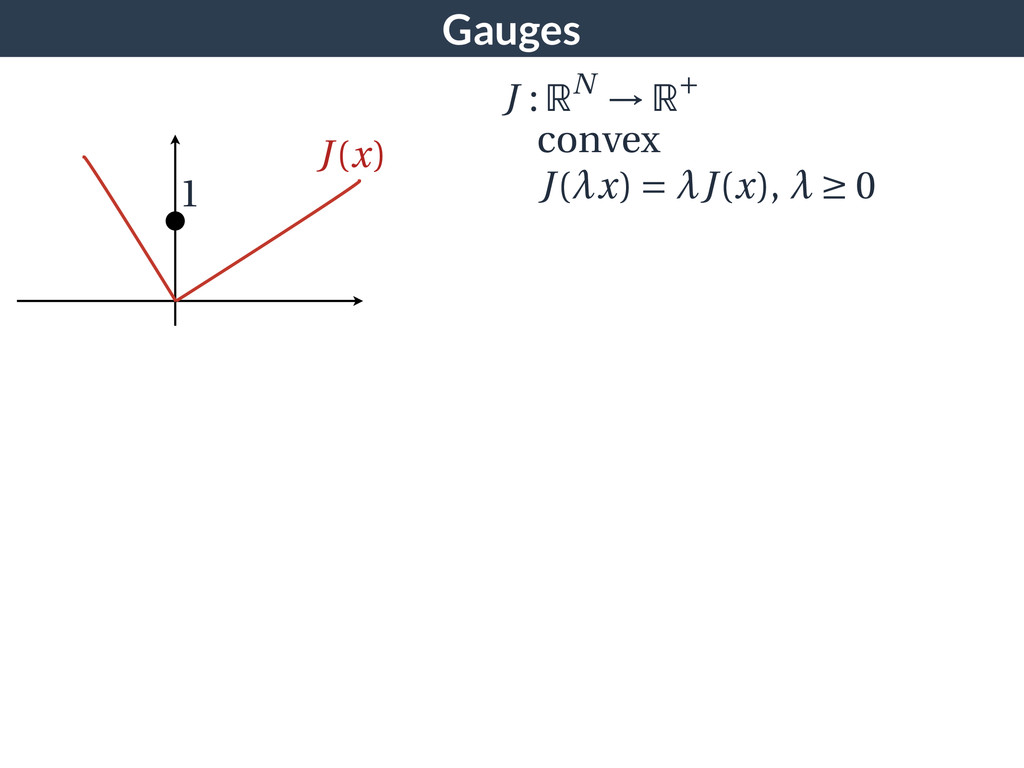
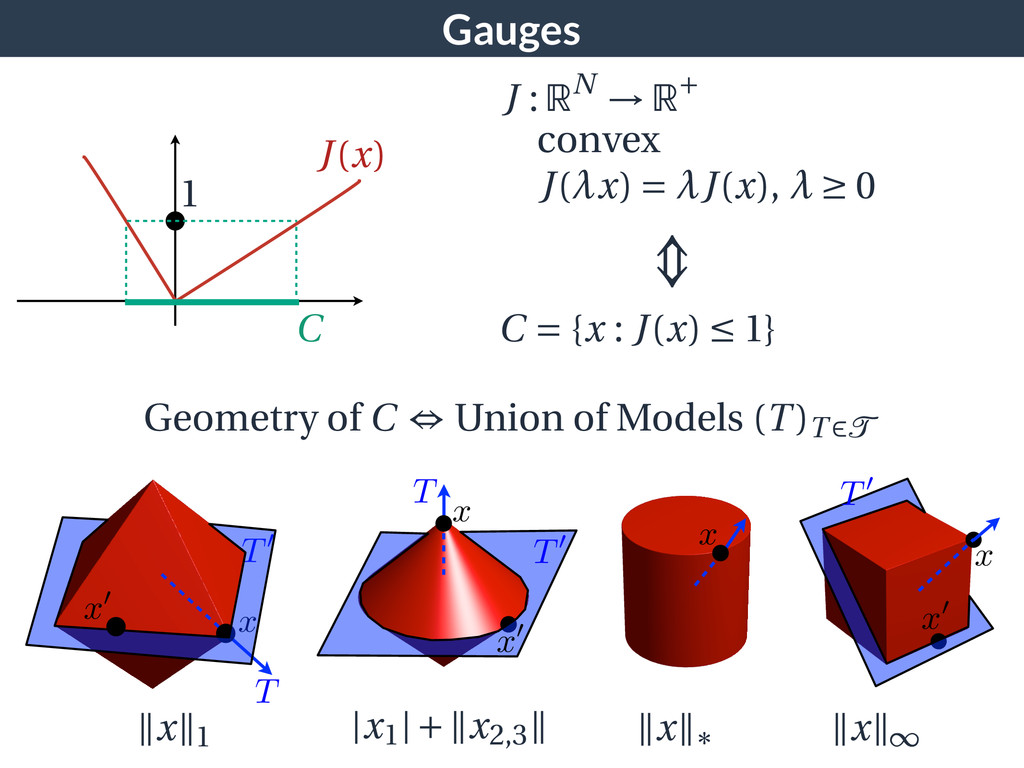
Gauges 1 J(x) J : RN R+ convex J( x)
= J(x), 0
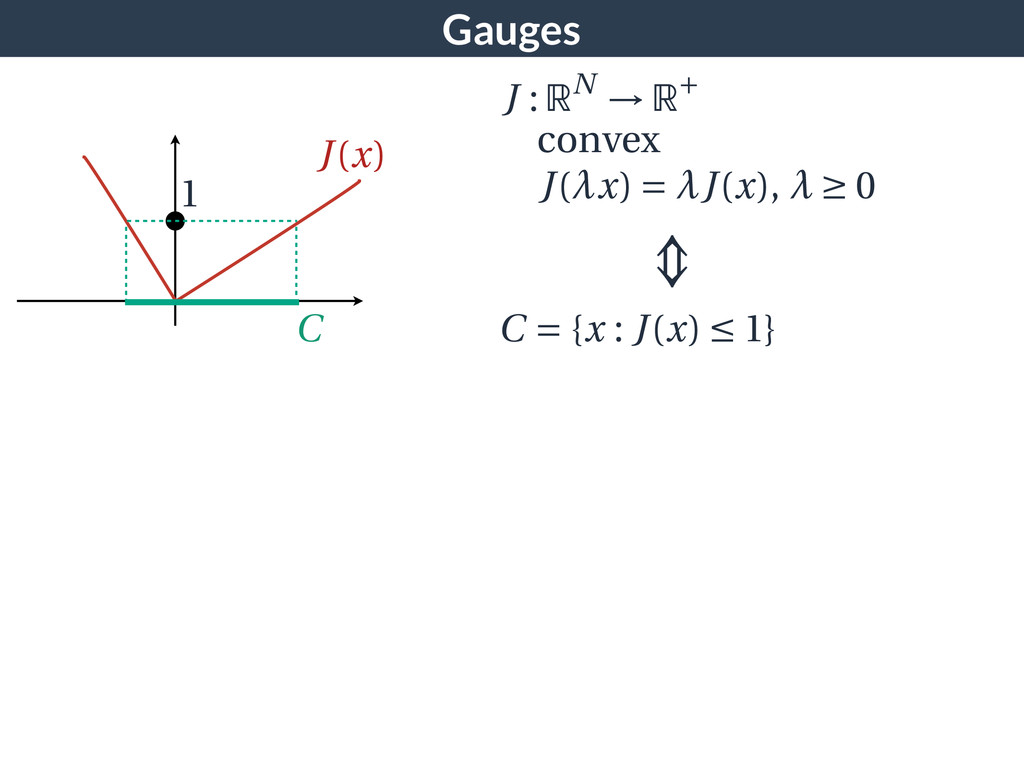
Gauges 1 J(x) J : RN R+ convex C C
= {x : J(x) 1} J( x) = J(x), 0
Gauges 1 J(x) J : RN R+ convex C C
= {x : J(x) 1} Geometry of C Union of Models (T )T T x T x x 0 T0 x x 0 T0 x 0 x T T0 ||x||1 |x1|+||x2,3|| ||x|| ||x|| J( x) = J(x), 0
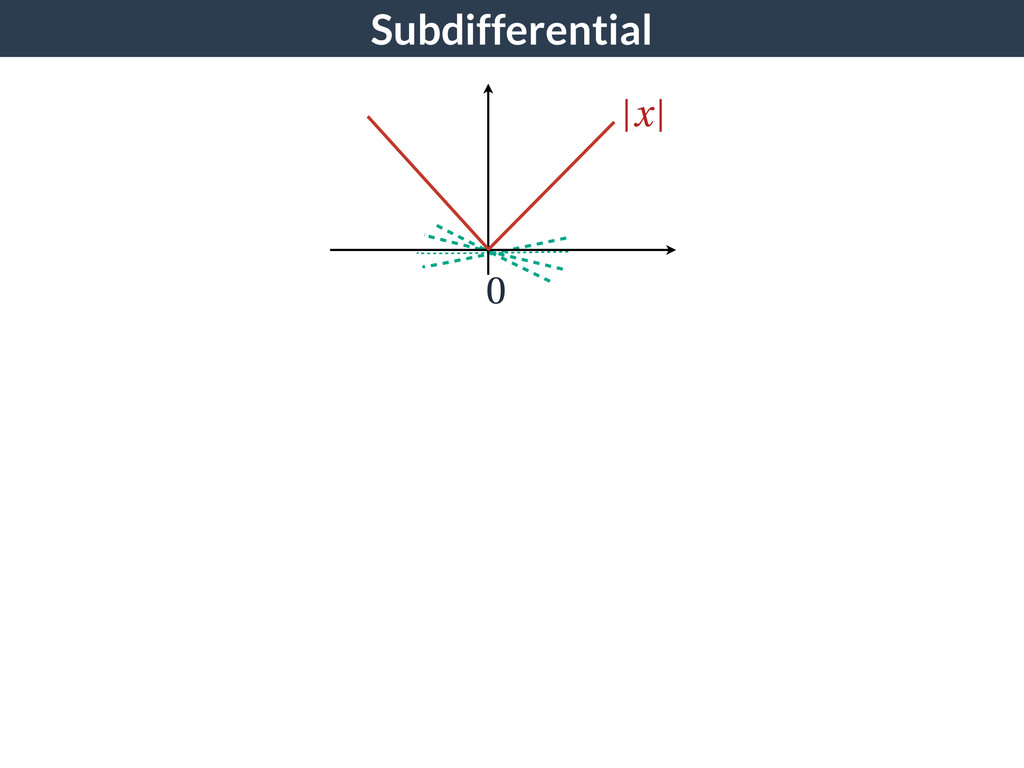
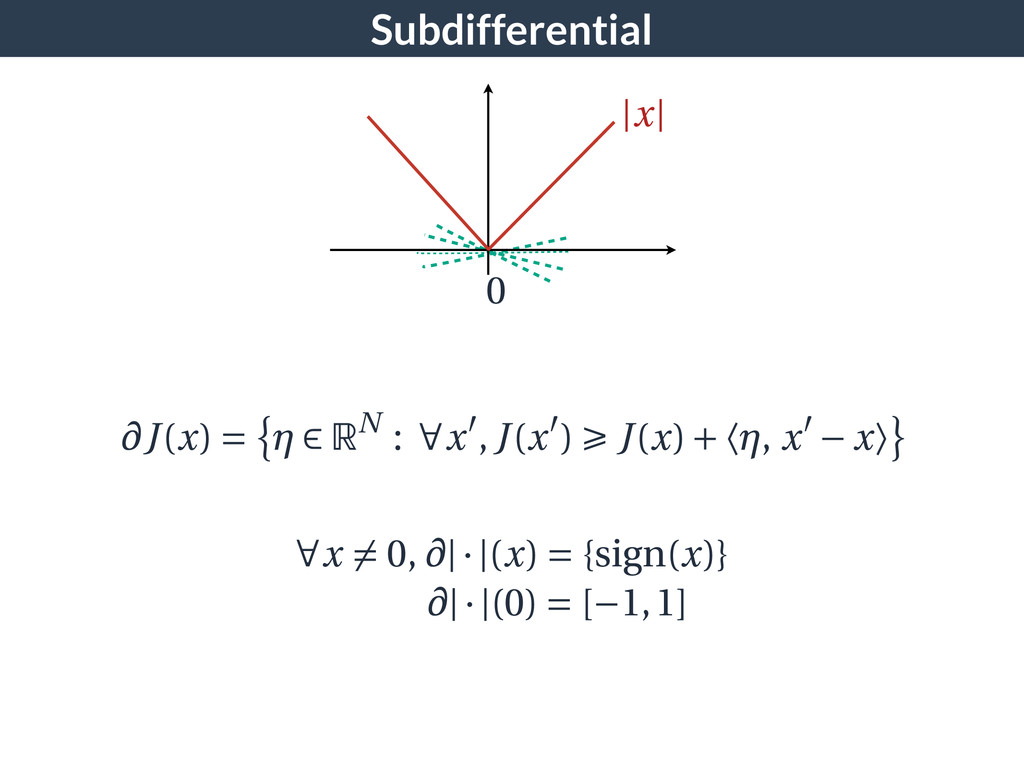
Subdifferential |x| 0
Subdifferential |x| 0
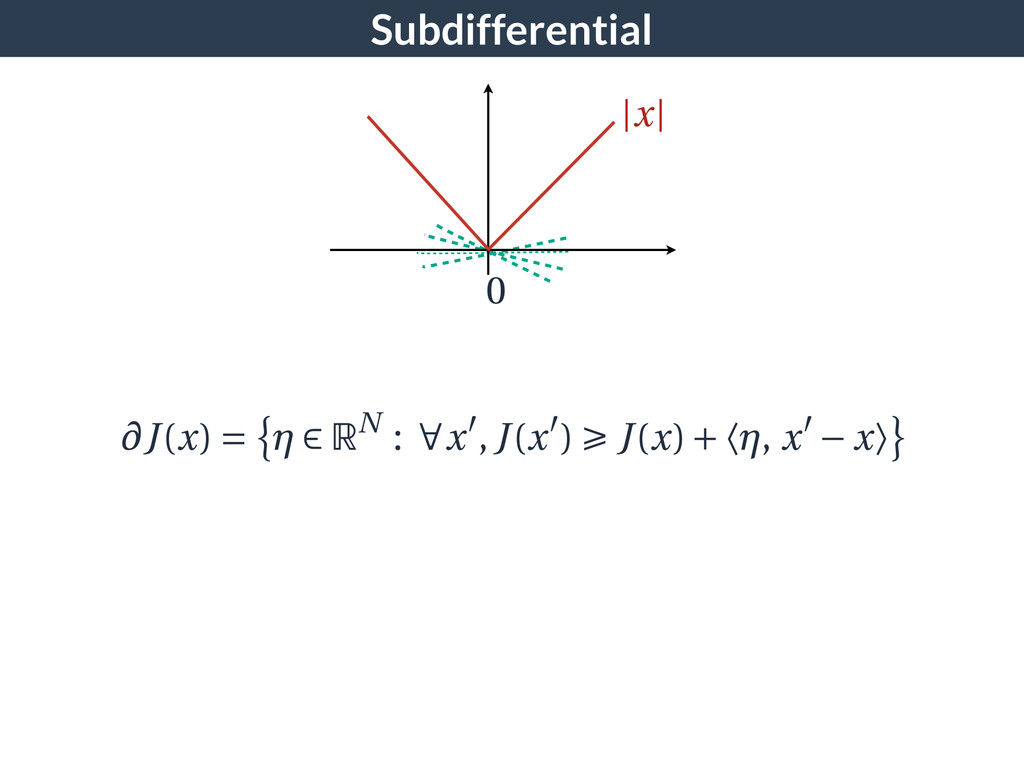
J(x) = RN : x , J(x ) J(x)+ ,
x x Subdifferential |x| 0
J(x) = RN : x , J(x ) J(x)+ ,
x x Subdifferential |x| 0 |·|(0) = [ 1,1] x = 0, |·|(x) = {sign(x)}
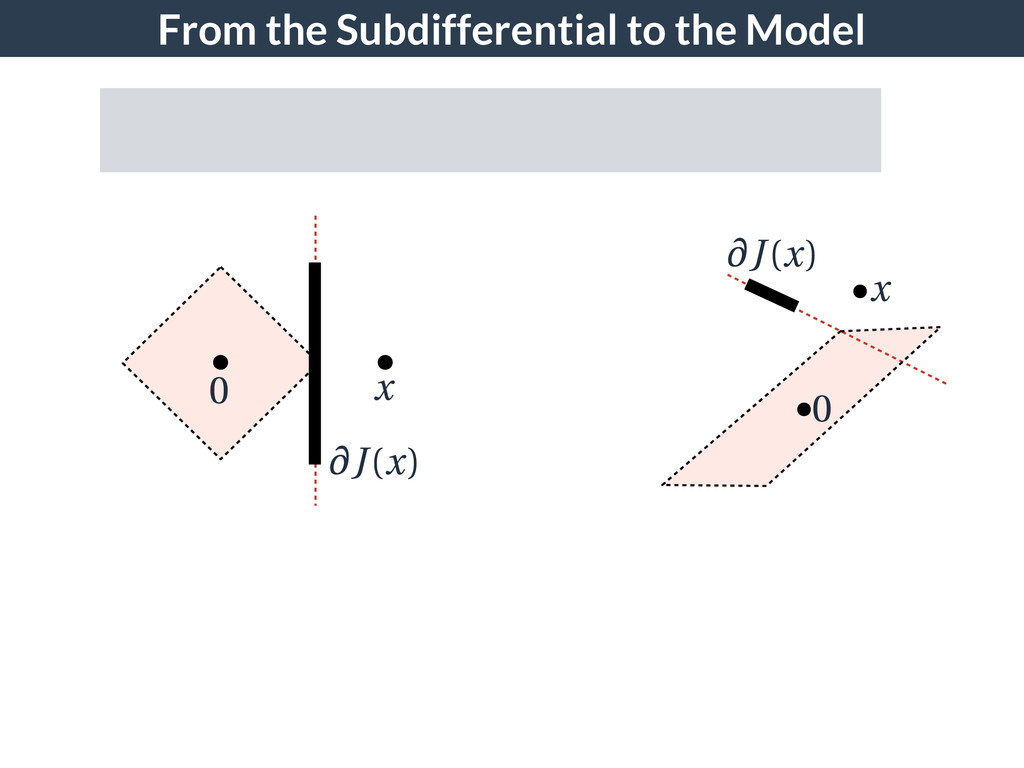
From the Subdifferential to the Model J(x) x 0 J(x)
x 0
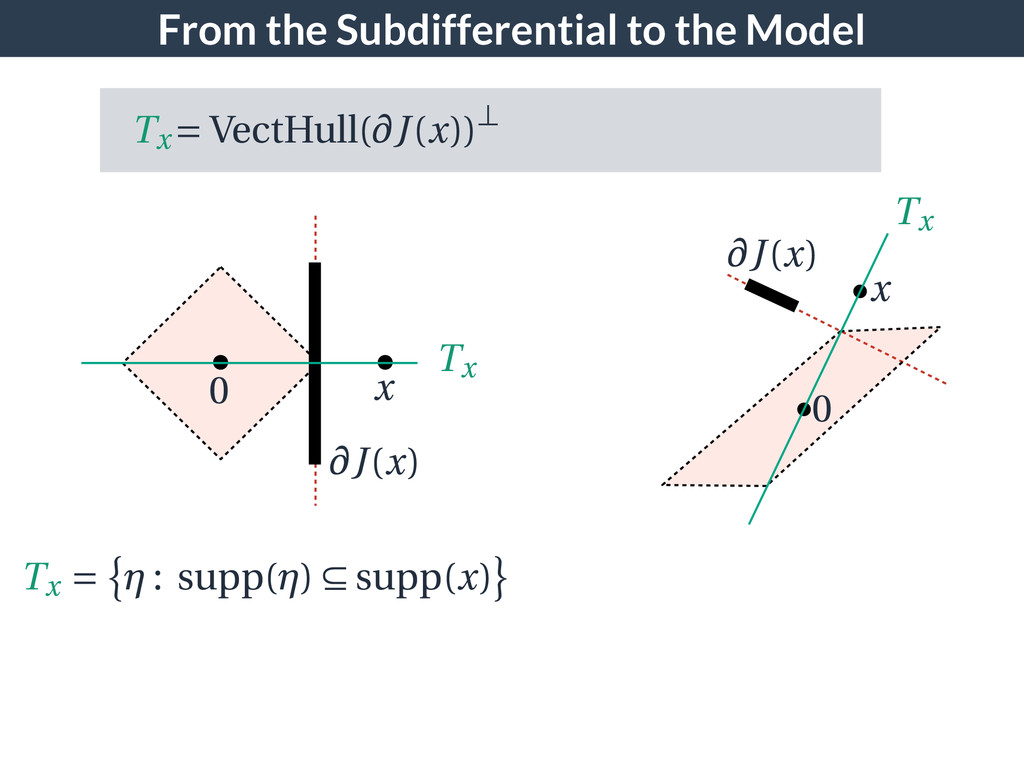
From the Subdifferential to the Model J(x) x 0 J(x)
x 0 Tx= VectHull( J(x)) Tx Tx Tx = : supp( ) supp(x)
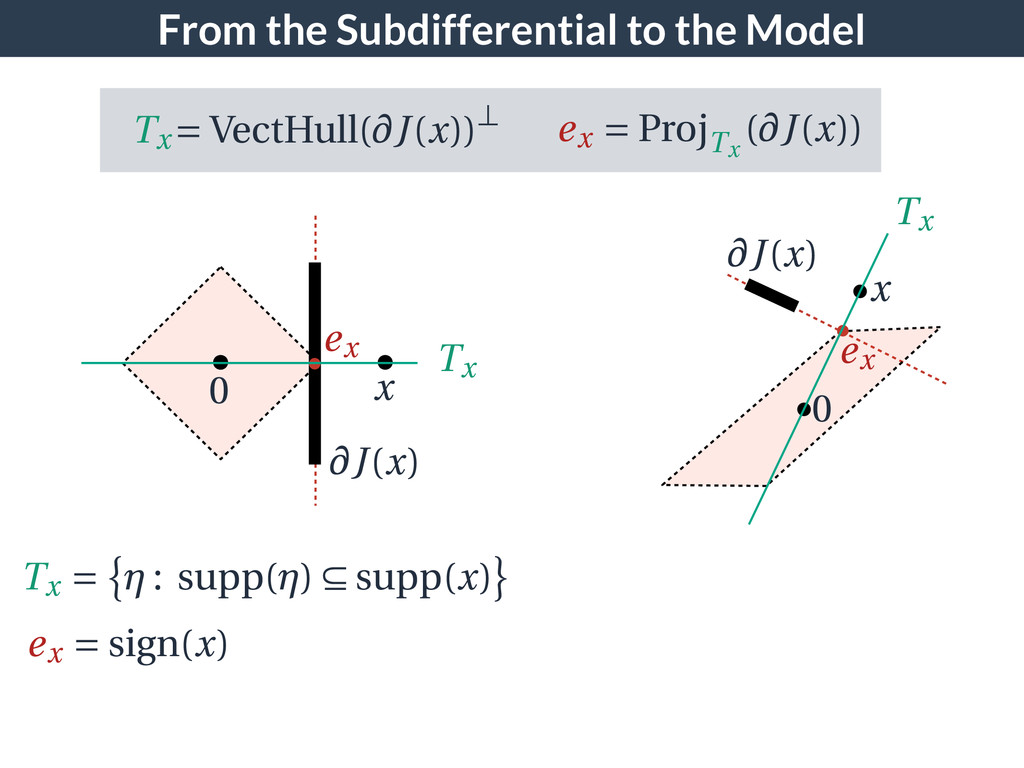
From the Subdifferential to the Model J(x) x 0 J(x)
x 0 ex = ProjTx ( J(x)) ex ex ex = sign(x) Tx= VectHull( J(x)) Tx Tx Tx = : supp( ) supp(x)
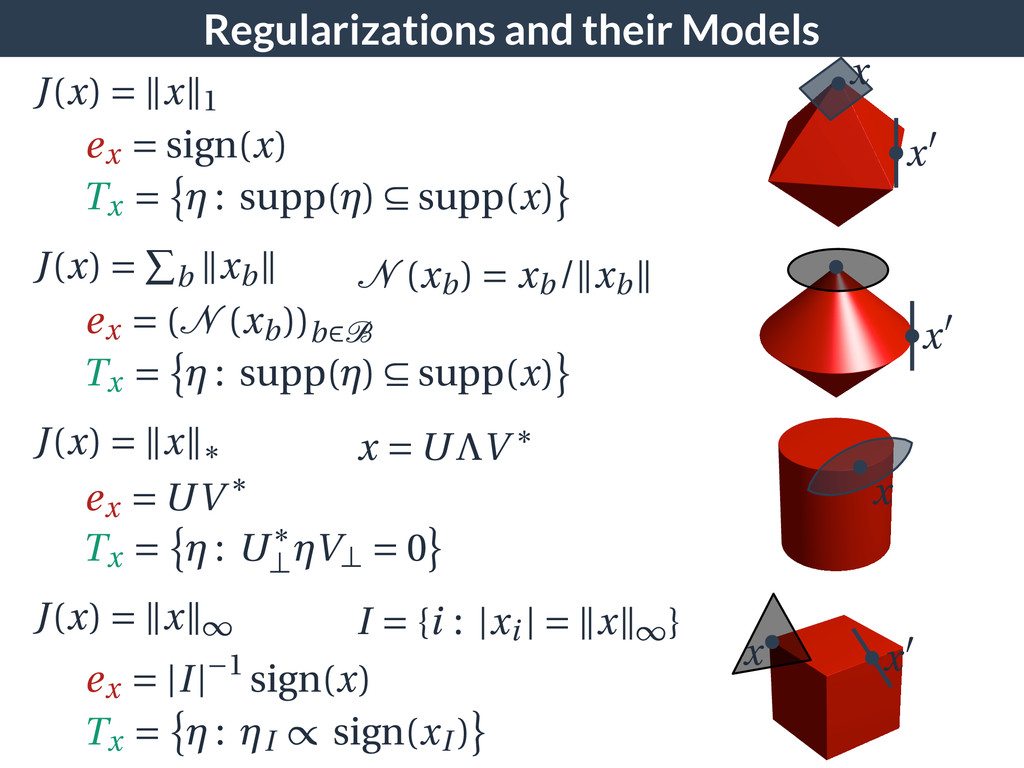
Regularizations and their Models J(x) = ||x||1 ex = sign(x)
Tx = : supp( ) supp(x) x x J(x) = b ||xb|| ex = (N (xb))b B Tx = : supp( ) supp(x) x N (xb) = xb/||xb|| J(x) = ||x||∗ ex =UV Tx = : U V = 0 x x =UΛV ∗ J(x) = ||x||∞ ex = |I| 1 sign(x) Tx = : I sign(xI ) x x I = {i : |xi | = ||x||∞}
Dual Certificates and Model Selection x argmin x RN 1
2 ||y x||2 2 + J(x) Hypothesis: Ker Tx0 = {0} J regular enough
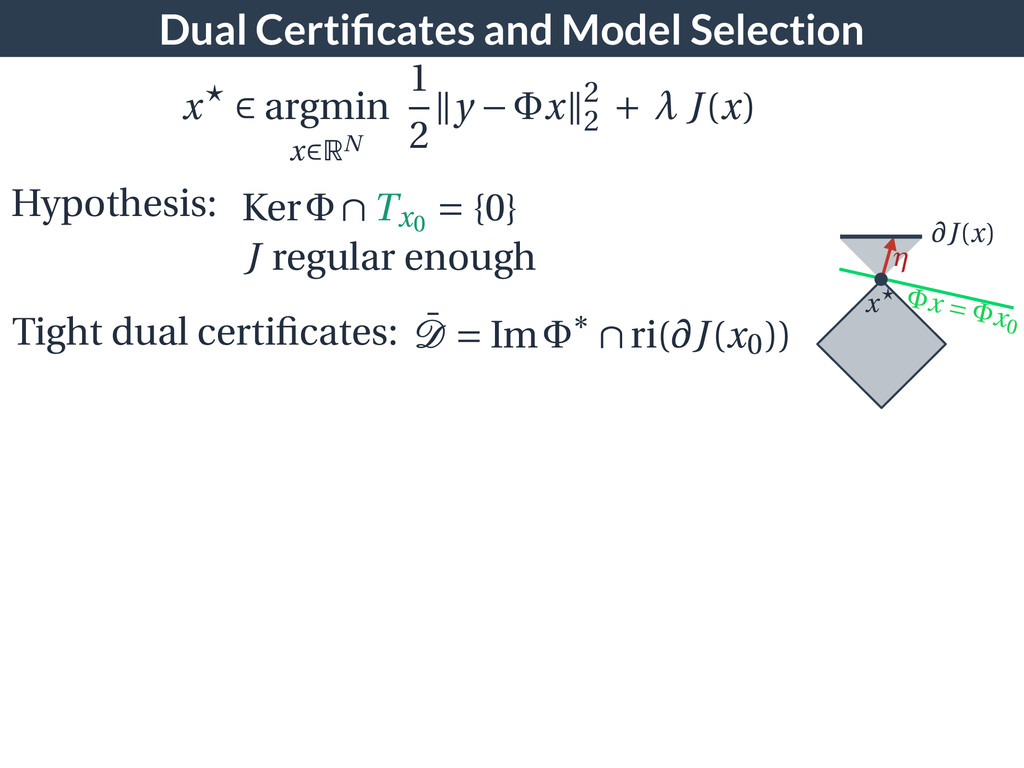
Dual Certificates and Model Selection x argmin x RN 1
2 ||y x||2 2 + J(x) Hypothesis: Ker Tx0 = {0} J regular enough ¯ D = Im ri( J(x0)) Tight dual certificates: x = x0 J(x) x
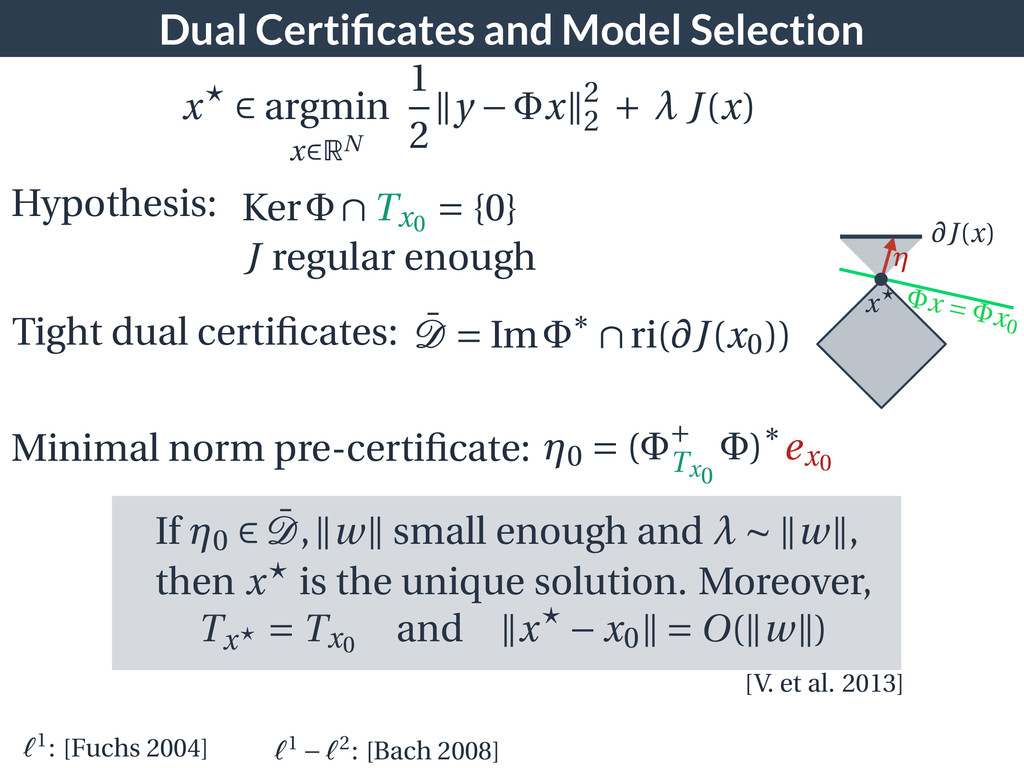
Dual Certificates and Model Selection x argmin x RN 1
2 ||y x||2 2 + J(x) Hypothesis: 0 = ( + Tx0 ) ex0 Minimal norm pre-certificate: Tx = Tx0 and ||x x0|| = O(||w||) If 0 ¯ D,||w|| small enough and ||w||, then x is the unique solution. Moreover, [V. et al. 2013] 1: [Fuchs 2004] 1 2: [Bach 2008] Ker Tx0 = {0} J regular enough ¯ D = Im ri( J(x0)) Tight dual certificates: x = x0 J(x) x
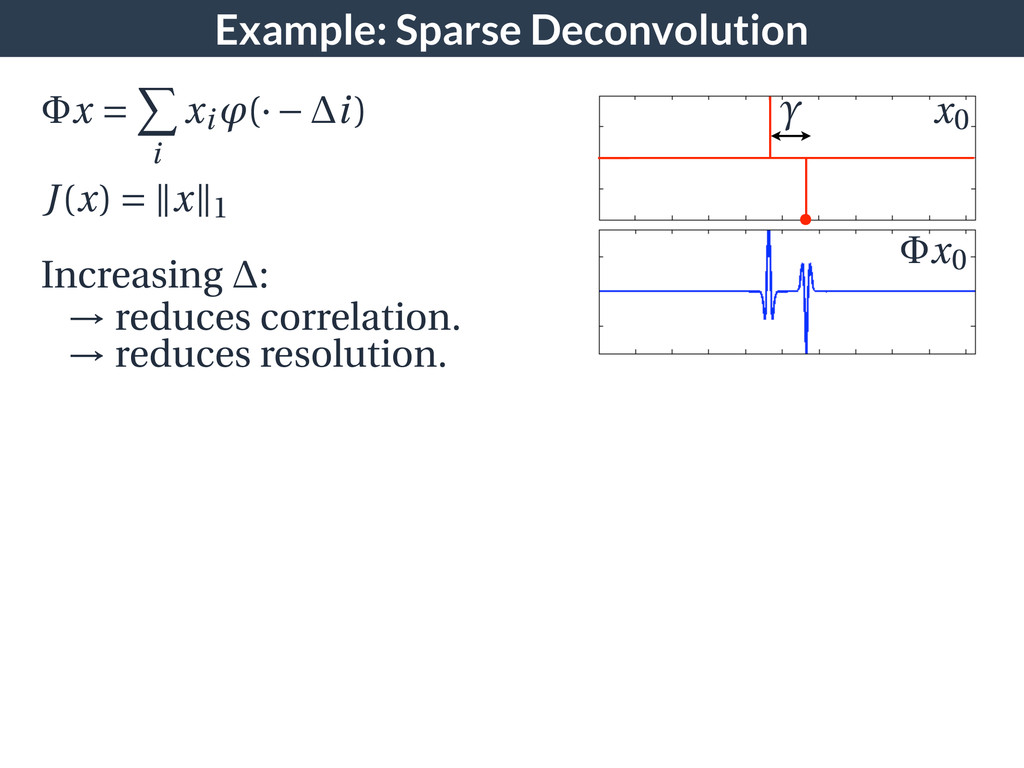
Example: Sparse Deconvolution x = i xi (· i) J(x)
= ||x||1 Increasing : reduces correlation. reduces resolution. x0 x0
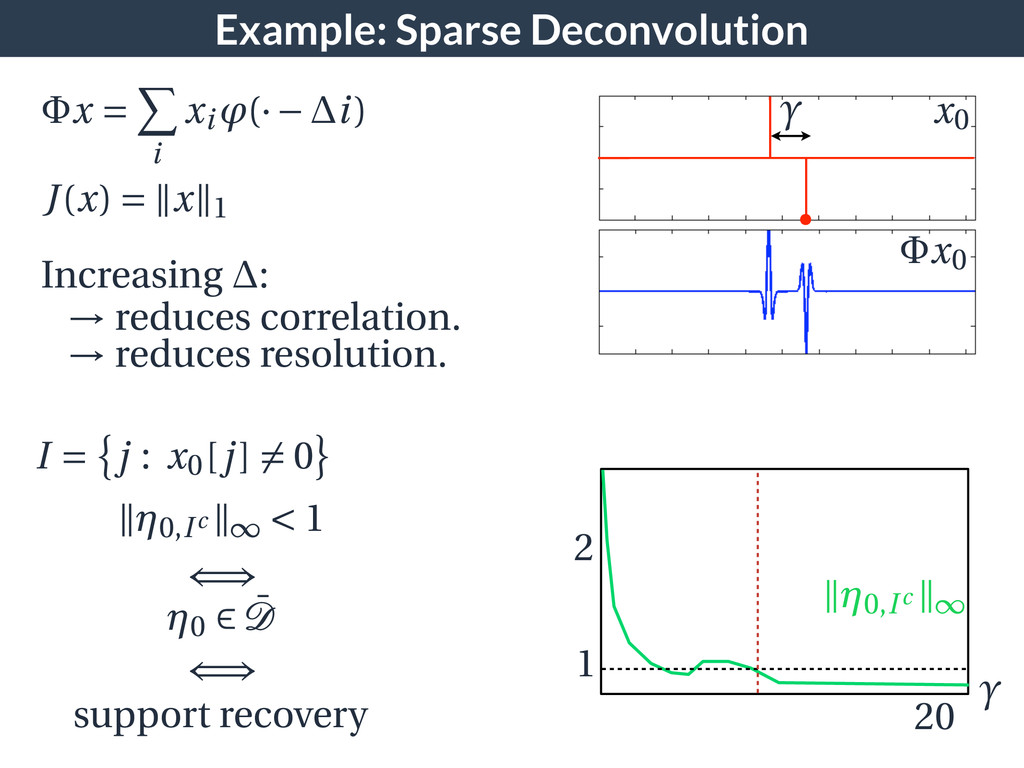
Example: Sparse Deconvolution x = i xi (· i) J(x)
= ||x||1 Increasing : reduces correlation. reduces resolution. x0 x0 I = j : x0[j] = 0 || 0,Ic || < 1 0 ¯ D support recovery || 0,Ic || 1 2 20
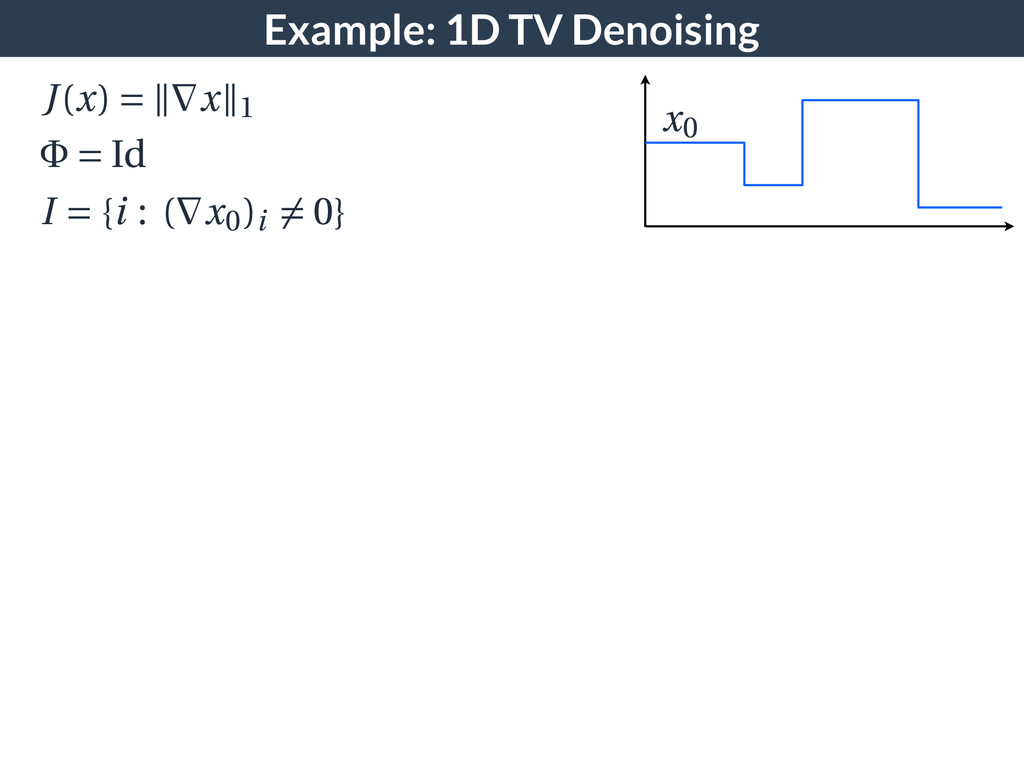
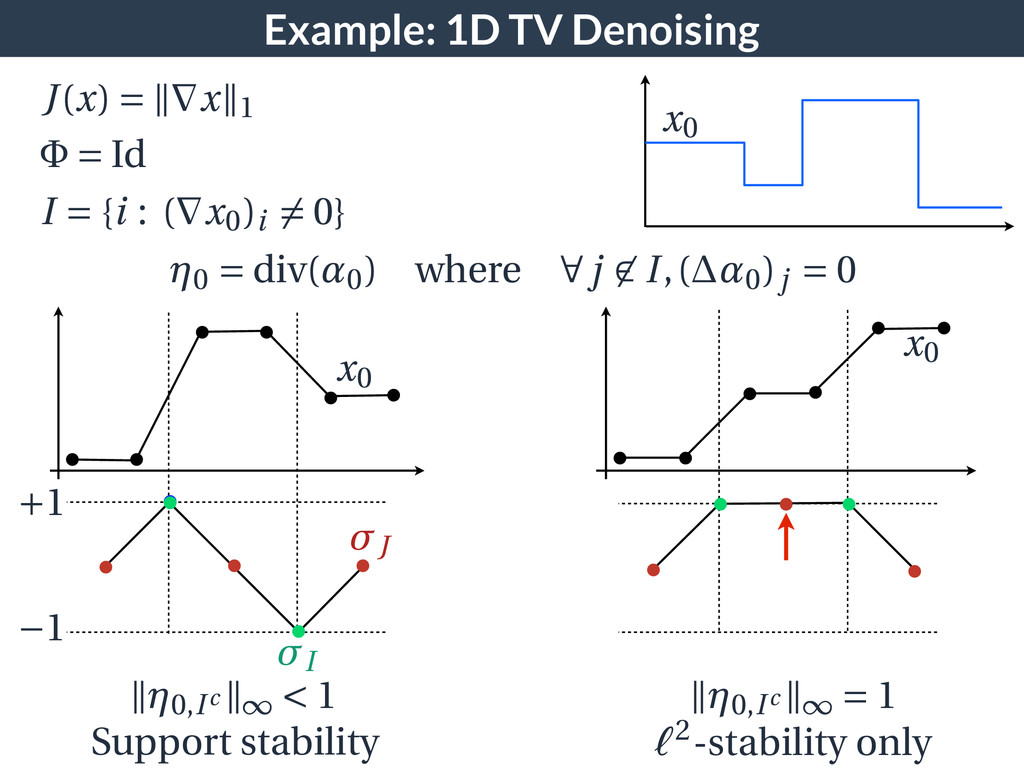
Example: 1D TV Denoising J(x) = || x||1 = Id
I = {i : ( x0)i = 0} x0
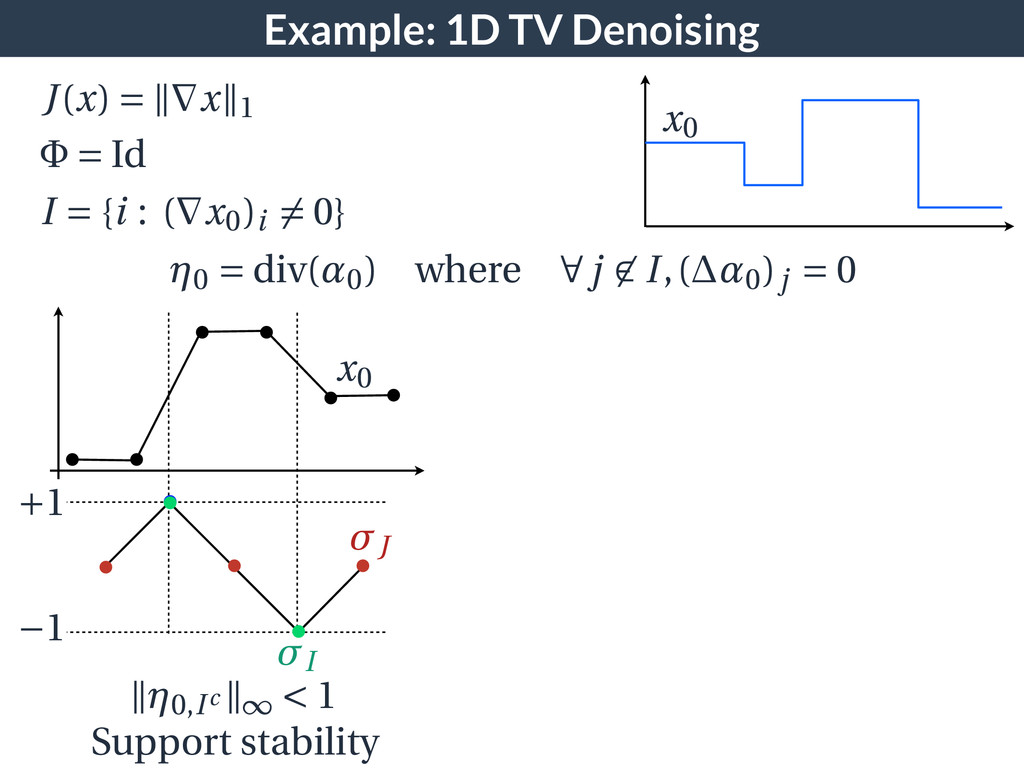
Example: 1D TV Denoising J(x) = || x||1 = Id
I = {i : ( x0)i = 0} x0 +1 1 0 = div( 0) where j I,( 0)j = 0 x0 I J || 0,Ic || < 1 Support stability
Example: 1D TV Denoising J(x) = || x||1 = Id
I = {i : ( x0)i = 0} x0 +1 1 0 = div( 0) where j I,( 0)j = 0 x0 I J || 0,Ic || < 1 Support stability x0 || 0,Ic || = 1 2-stability only
Conclusion Gauges: encode linear models as singular points
Conclusion Gauges: encode linear models as singular points Certificates: guarantees
of model selection / 2 robustness (see poster 208 for a pure robustness result)
Conclusion Merci de votre attention ! Gauges: encode linear models
as singular points Certificates: guarantees of model selection / 2 robustness (see poster 208 for a pure robustness result)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}