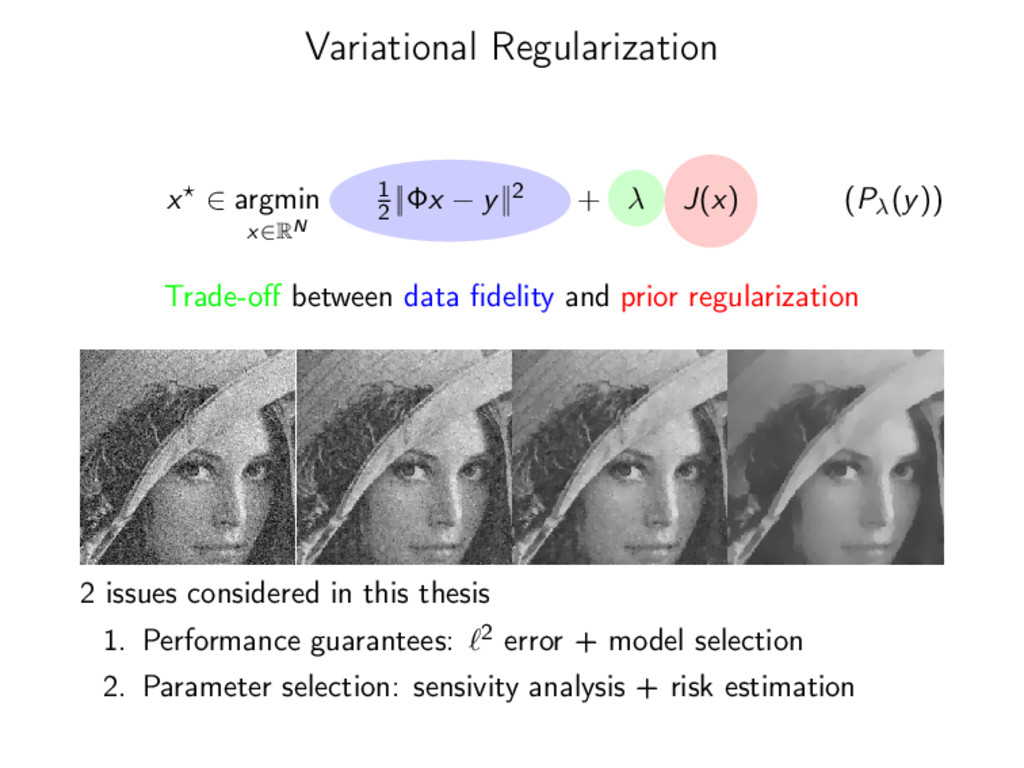
y||2 + λ J(x) (Pλ(y)) Trade-off between data fidelity and prior regularization 2 issues considered in this thesis 1. Performance guarantees: 2 error + model selection 2. Parameter selection: sensivity analysis + risk estimation
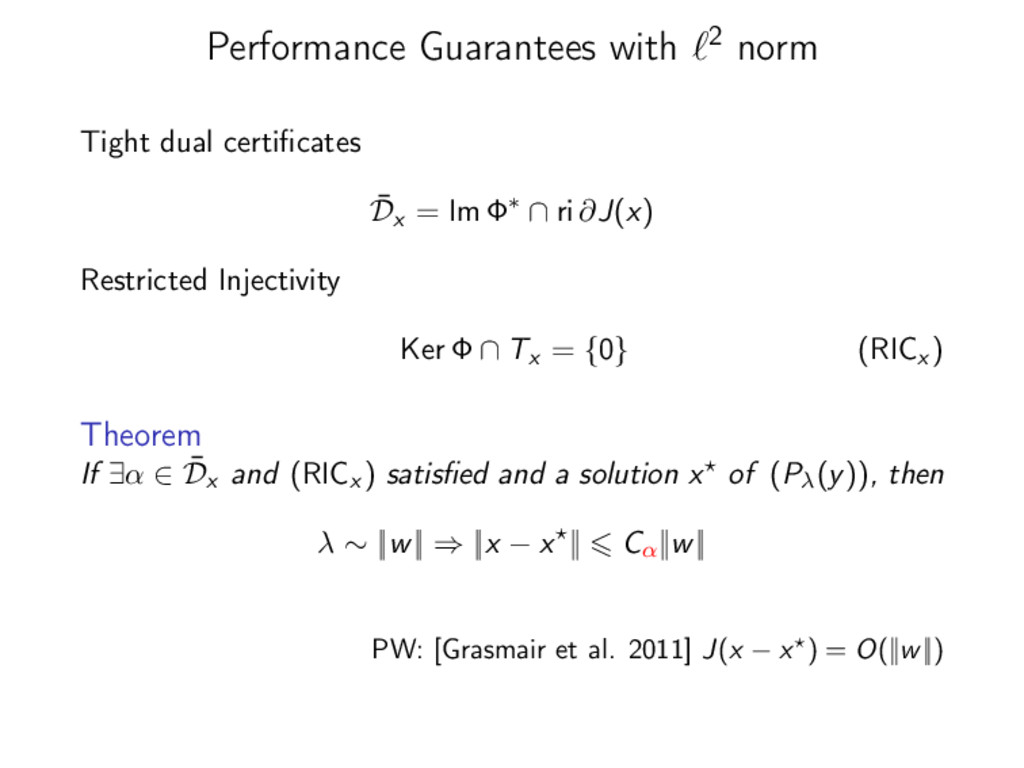
= Im Φ∗ ∩ ri ∂J(x) Restricted Injectivity Ker Φ ∩ Tx = {0} (RICx ) Theorem If ∃α ∈ ¯ Dx and (RICx ) satisfied and a solution x of (Pλ(y)), then λ ∼ ||w|| ⇒ ||x − x || Cα||w|| PW: [Grasmair et al. 2011] J(x − x ) = O(||w||)
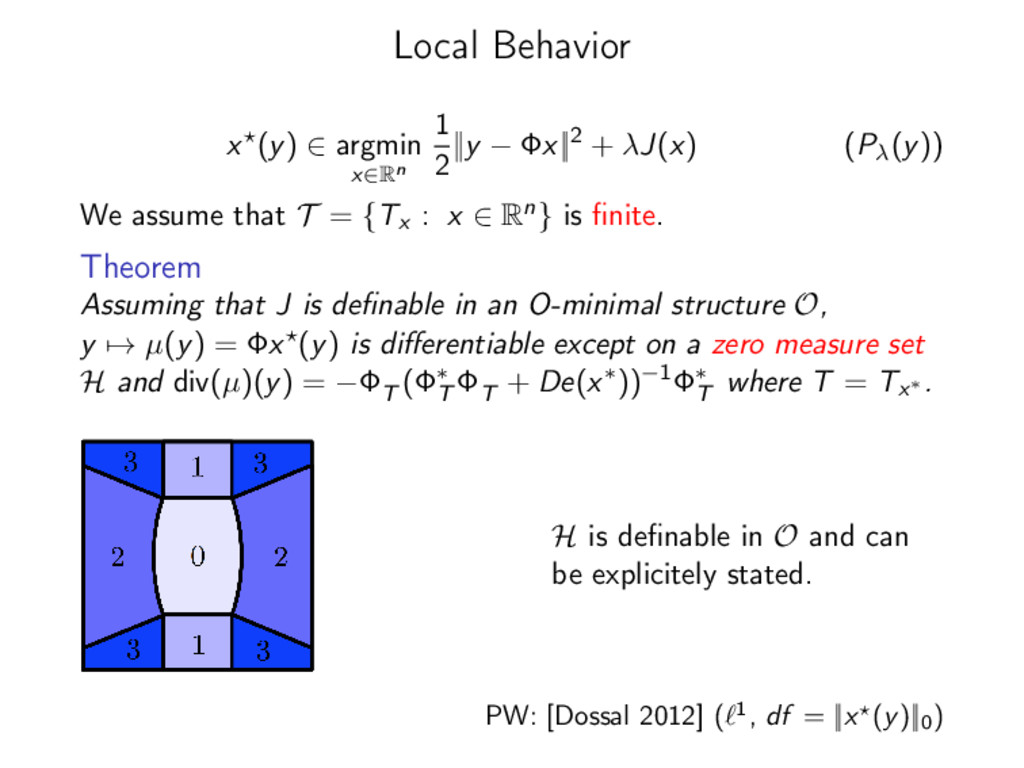
− Φx||2 + λJ(x) (Pλ(y)) We assume that T = {Tx : x ∈ Rn} is finite. Theorem Assuming that J is definable in an O-minimal structure O, y → µ(y) = Φx (y) is differentiable except on a zero measure set H and div(µ)(y) = −ΦT (Φ∗ T ΦT + De(x∗))−1Φ∗ T where T = Tx∗ . H is definable in O and can be explicitely stated. PW: [Dossal 2012] ( 1, df = ||x (y)||0 )
setting Total Variation case • Efficient SURE computation Model SURE vs Algorithm SURE • Better understanding of the geometry Optimization over ¯ Dx Behavior of α ∈ Dx \ ¯ Dx • Performance in CS settings
and C. Dossal, Robust sparse analysis regularization, Information Theory, 2013 V., C. Deledalle, J. Fadili, G. Peyré and C. Dossal, Local Behavior of Sparse Analysis Regularization: Applications to Risk Estimation, ACHA, 2012 V., M. Golbabaee, M. J. Fadili et G. Peyré, Model Selection with Piecewise Regular Gauges, Tech. report, http://arxiv.org/abs/1307.2342, 2013 J. Fadili, V. and G. Peyré, Linear Convergence Rates for Gauge Regularization, ongoing work V., C. Deledalle, J. Fadili, G. Peyré and C. Dossal, The Degrees of Freedom of Block Analysis Regularizers, ongoing work
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}