Paris-Dauphine 4 février 2014 GDR Isis : Apprentissage de représentations et traitement du signal J. Fadili G. Peyré C. Dossal M. Golbabaee C. Deledalle IMB GREYC CEREMADE
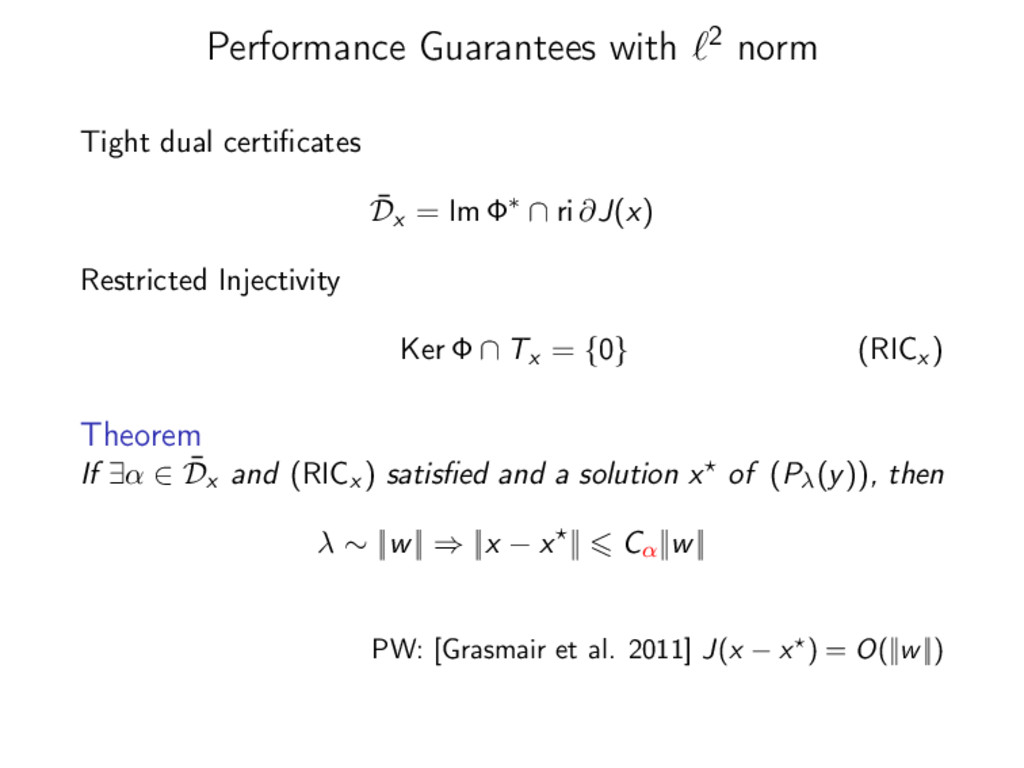
= Im Φ∗ ∩ ri ∂J(x) Restricted Injectivity Ker Φ ∩ Tx = {0} (RICx ) Theorem If ∃α ∈ ¯ Dx and (RICx ) satisfied and a solution x of (Pλ(y)), then λ ∼ ||w|| ⇒ ||x − x || Cα||w|| PW: [Grasmair et al. 2011] J(x − x ) = O(||w||)
setting Total Variation case • Efficient SURE computation Model SURE vs Algorithm SURE • Better understanding of the geometry Optimization over ¯ Dx Behavior of α ∈ Dx \ ¯ Dx • Performance in CS settings
and C. Dossal, Robust sparse analysis regularization, Information Theory, 2013 V., C. Deledalle, J. Fadili, G. Peyré and C. Dossal, Local Behavior of Sparse Analysis Regularization: Applications to Risk Estimation, ACHA, 2012 V., M. Golbabaee, M. J. Fadili et G. Peyré, Model Selection with Piecewise Regular Gauges, Tech. report, http://arxiv.org/abs/1307.2342, 2013 J. Fadili, V. and G. Peyré, Linear Convergence Rates for Gauge Regularization, ongoing work V., C. Deledalle, J. Fadili, G. Peyré and C. Dossal, The Degrees of Freedom of Block Analysis Regularizers, ongoing work
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}