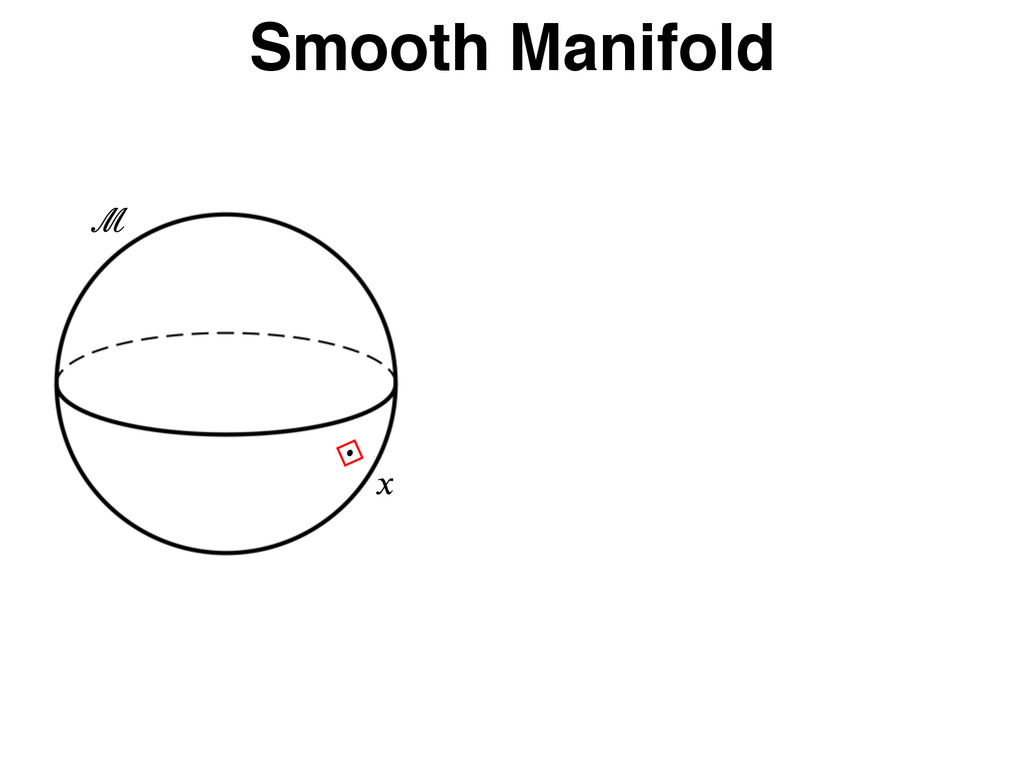
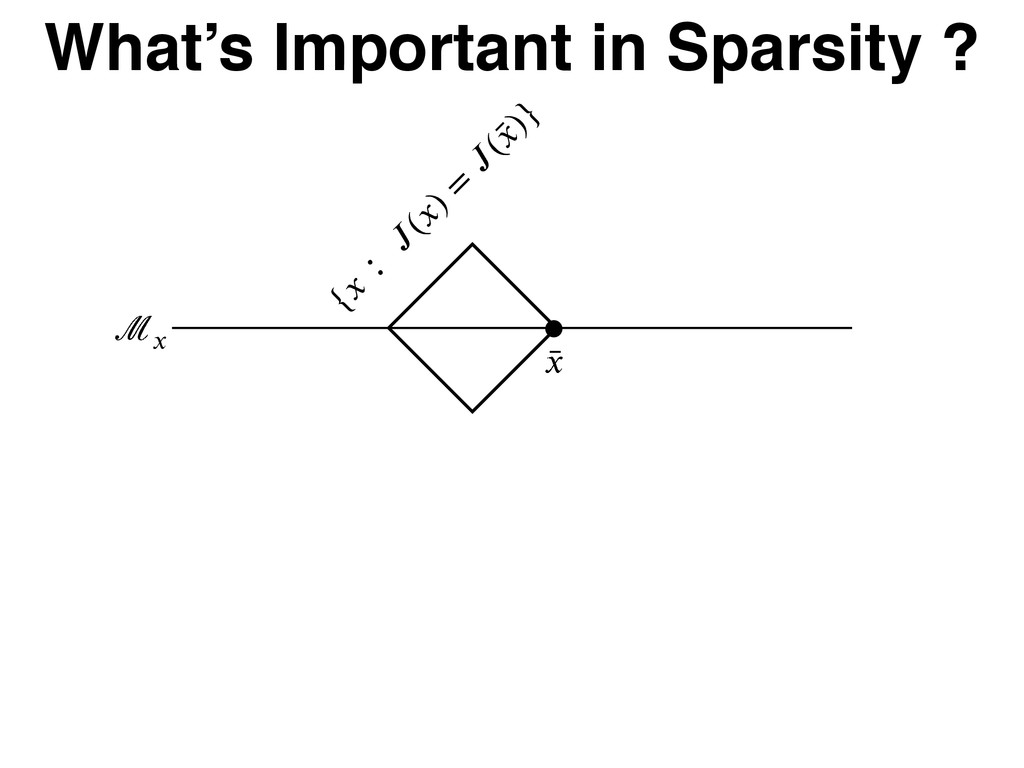
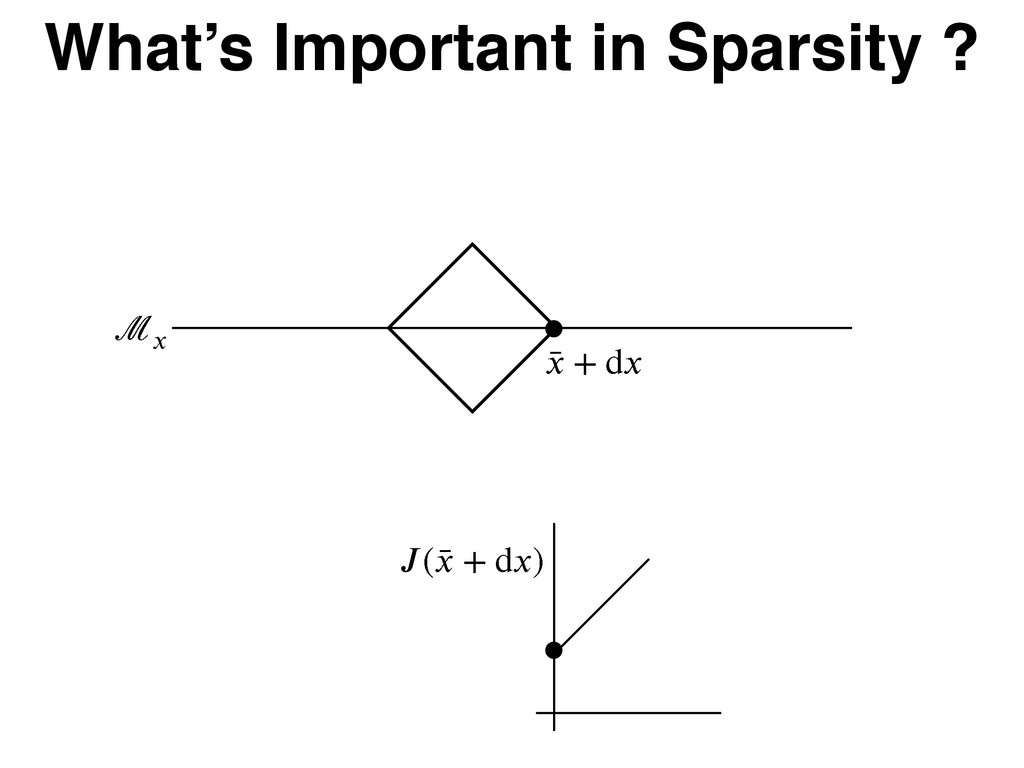
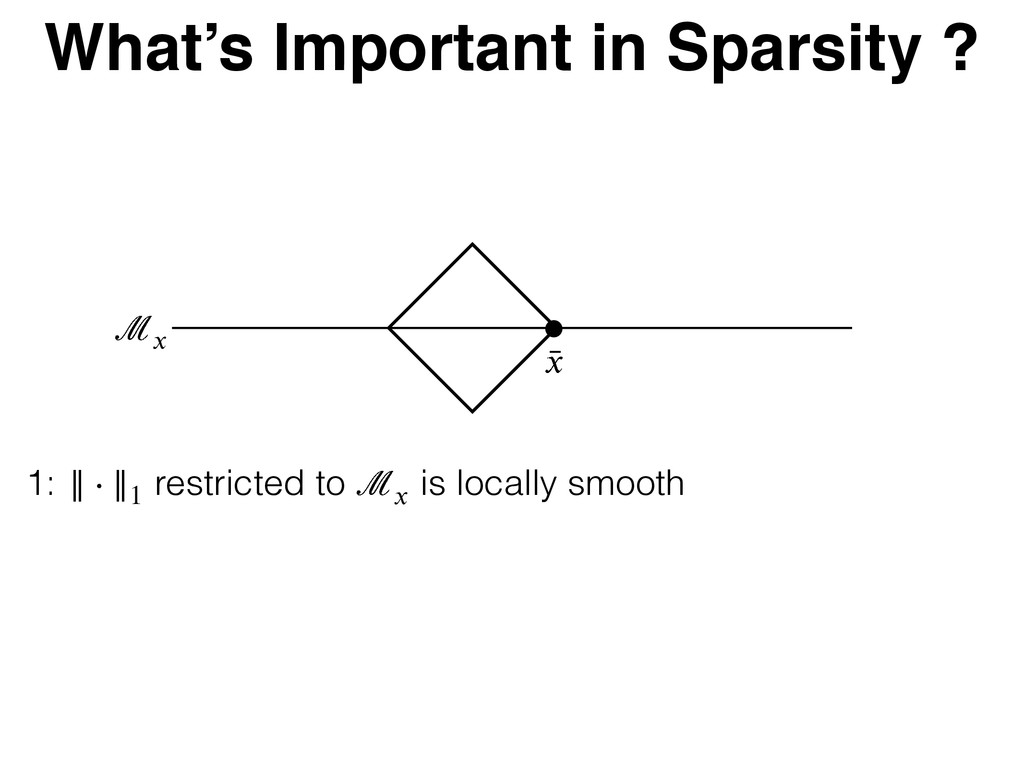
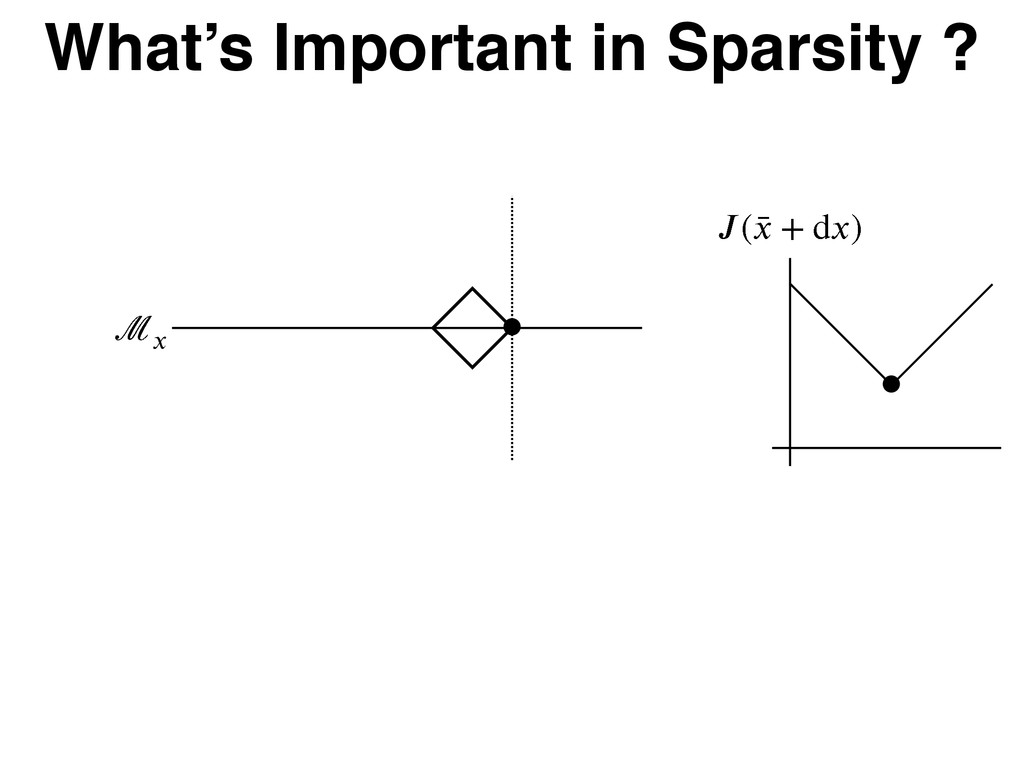
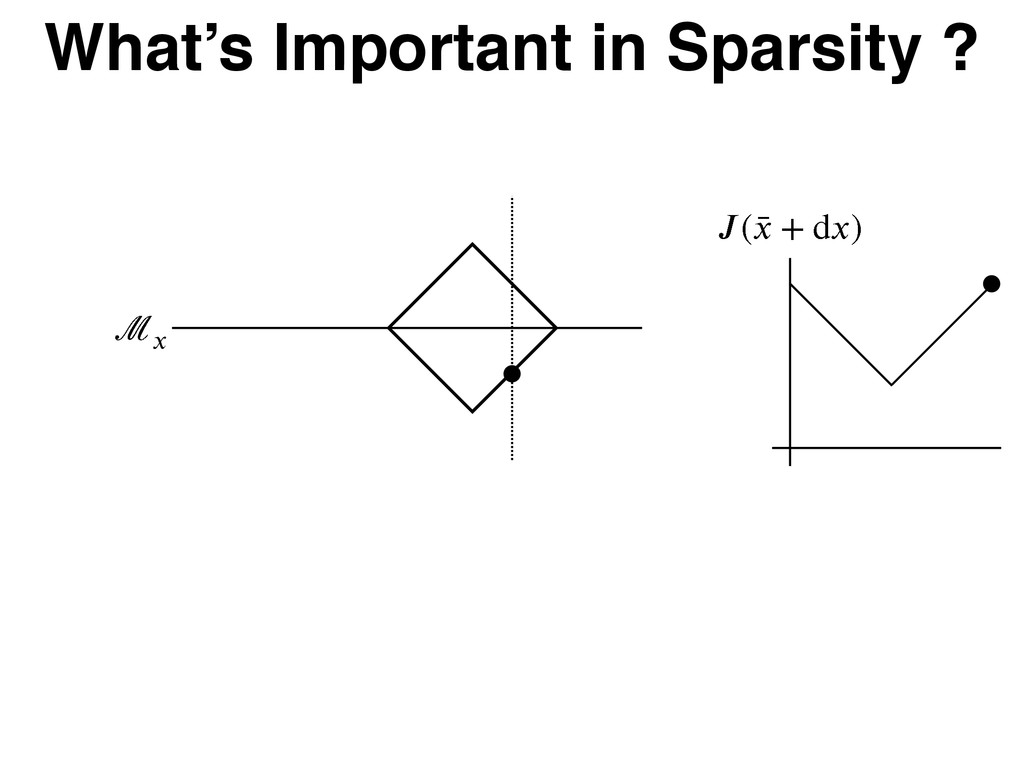
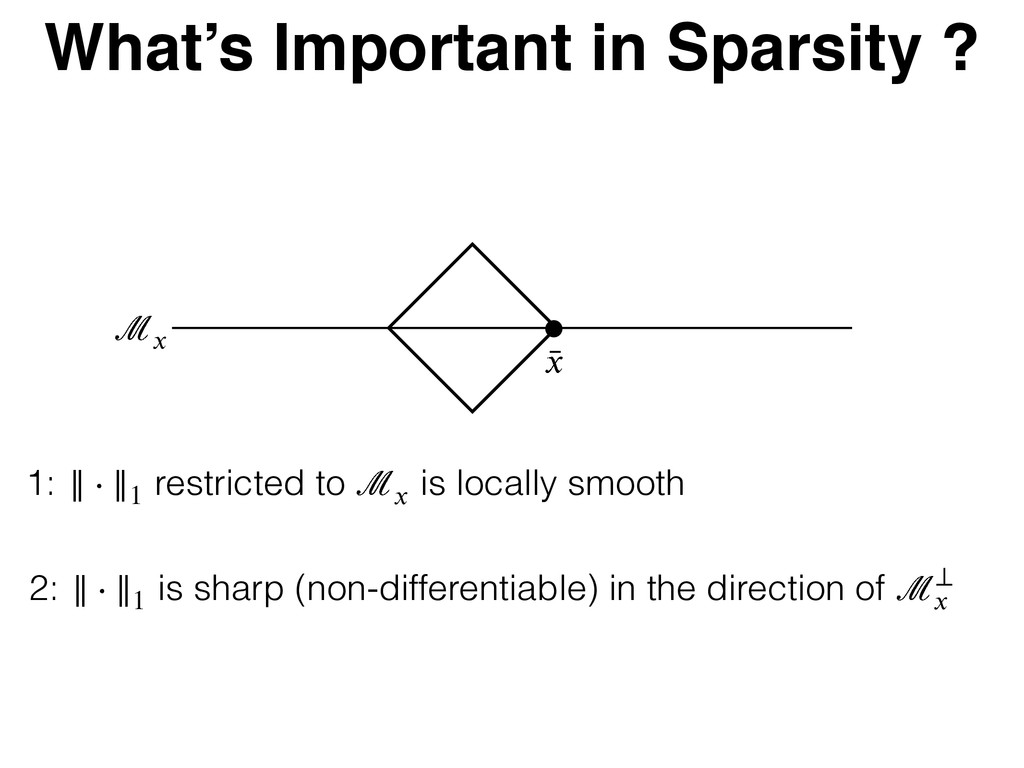
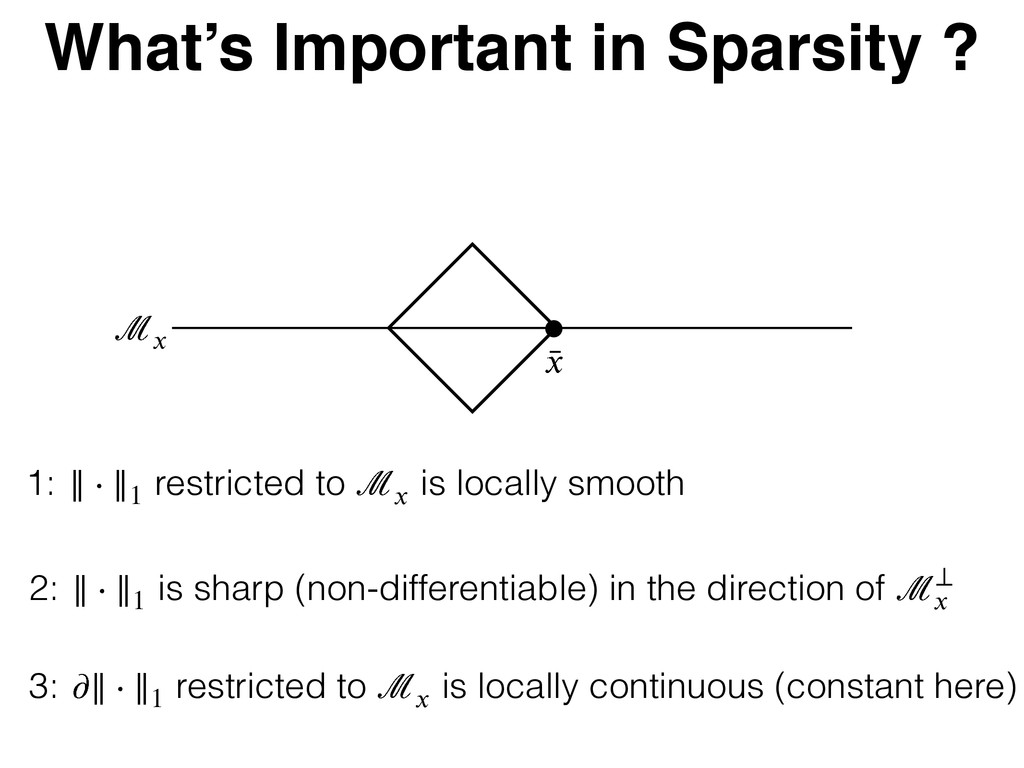
Բ }}2 restricted to Ϥ is locally smooth 2: }} Բ }}2 is sharp (non-differentiable) in the direction of ϤԒ 3: ౯}} Բ }}2 restricted to Ϥ is locally continuous (constant here)
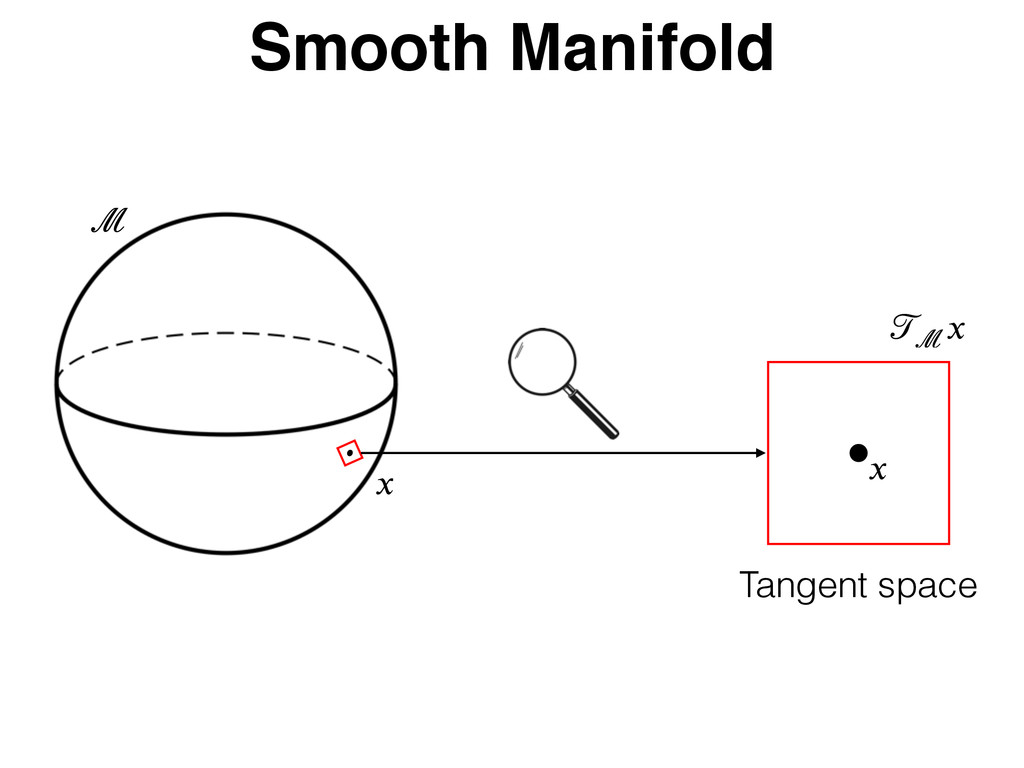
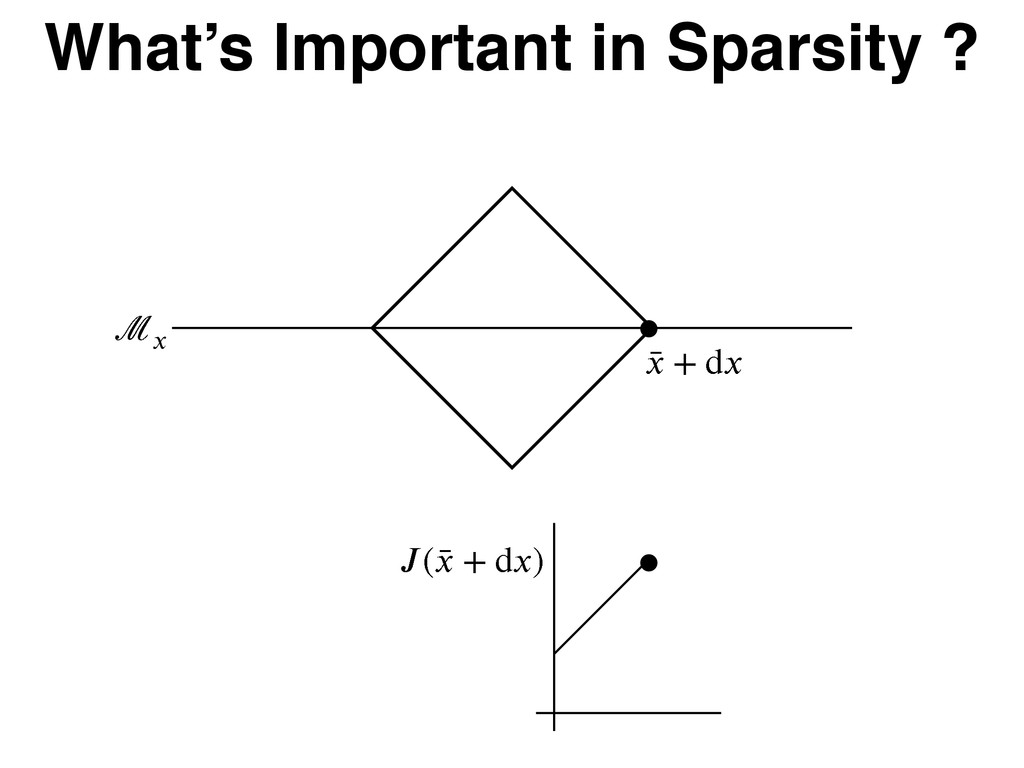
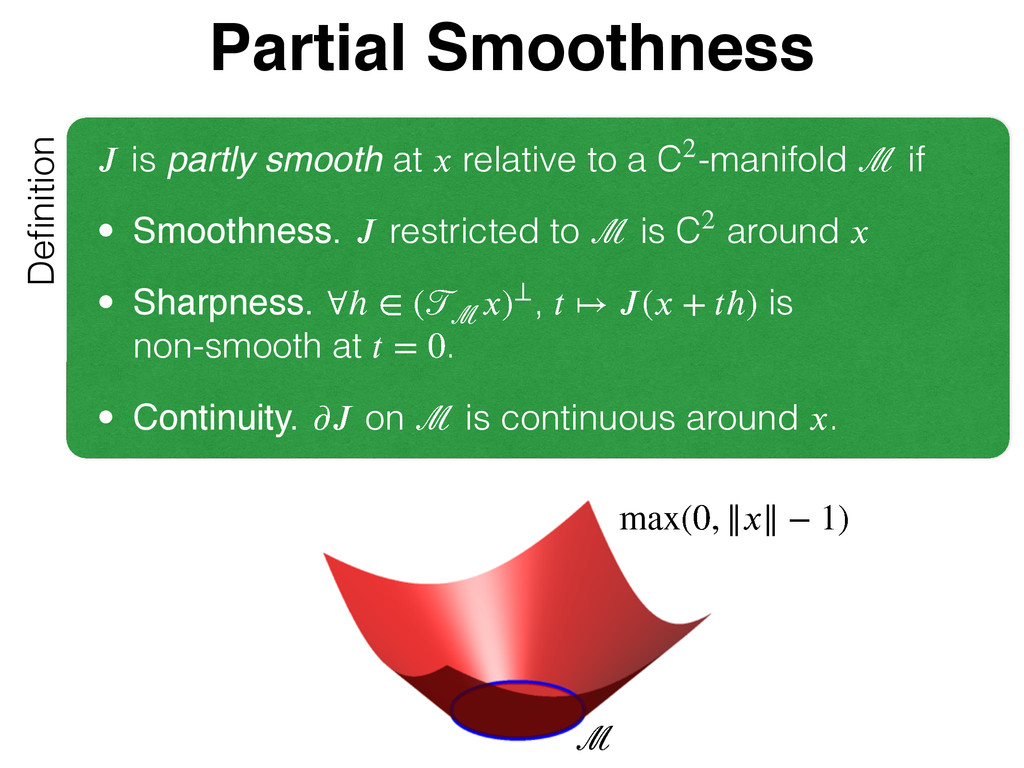
to a C3 -manifold Ϥ if • Smoothness. restricted to Ϥ is C3 around • Sharpness. ѭυ ѵ )ਚϤ *Ԓ , М ) , υ* is non-smooth at > 1. • Continuity. ౯ on Ϥ is continuous around . Ϥ nby)1- }}}} ѿ 2*
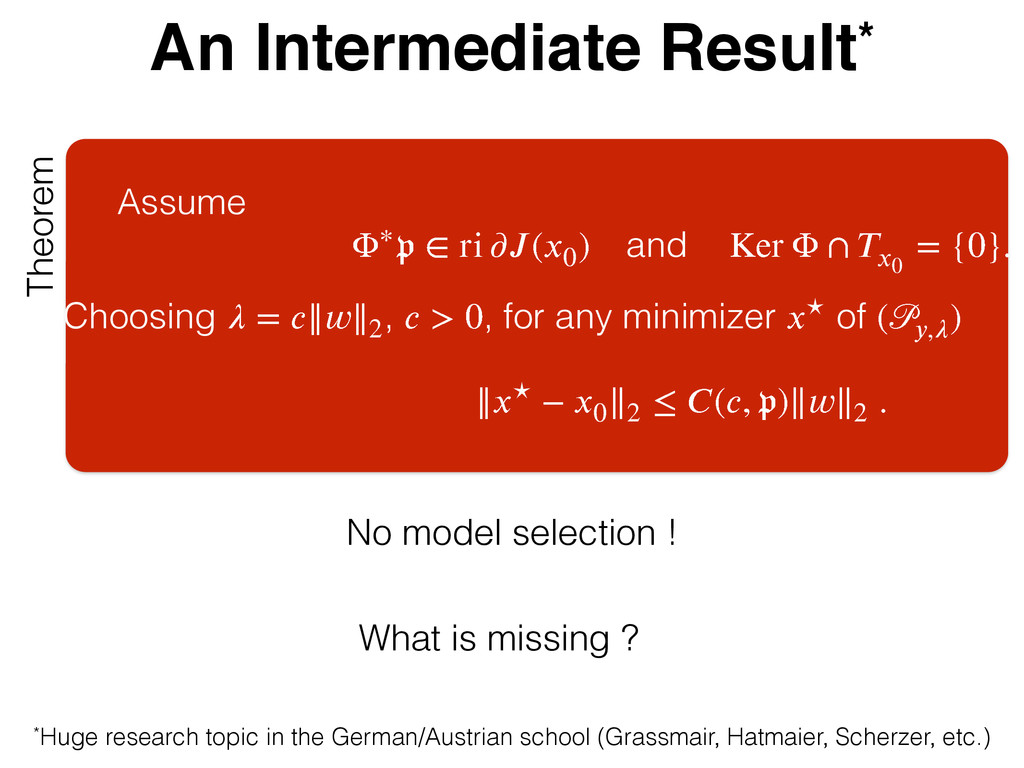
and Lfs ʇ Җ 1 > |1~/ Choosing ౠ > ৄ}}ৗ}}3, ৄ ? 1, for any minimizer Գ of )ਗ-ౠ * }}Գ ѿ 1 }}3 ӑ প)ৄ- ઐ*}}ৗ}}3 / No model selection ! What is missing ? *Huge research topic in the German/Austrian school (Grassmair, Hatmaier, Scherzer, etc.)
relative to Ϥ. Suppose ʇ҄ઐভ ѵ sj ౯)1 * and Lfs ʇ Җ 1 > |1~/ There exists প ? 1 such that if nby)ౠ- }}ৗ}}0ౠ* ӑ প- the unique solution Գ of (ਗ-ౠ) satisfies Գ ѵ Ϥ and }}Գ ѿ 1 }} > শ)}}ৗ}}*/
some assumptions, one observes that both “energy” recovery and “localization” recovery hold. • Convex Analysis • Geometrical Structure Solutions build around the dual of the constrained problem Partial smoothness is the key
V., G. Peyré, J. Fadili, Low Complexity Regularizations, LNCS, 2015 Preprint on model selection/consistency: V., G. Peyré, J. Fadili, Manifold Consistency with Partly Smooth Regularizers Special case for analysis sparsity: V., C. Dossal, G. Peyré, J. Fadili, Robust Sparse Analysis Regularization, TIT, 2013
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}