Polytechnique, France [email protected] Joint work with: Gabriel Peyré (CEREMADE, Univ. Paris–Dauphine) Jalal Fadili (GREY’C, ENSICAEN) May 29, 2015 AIP’15
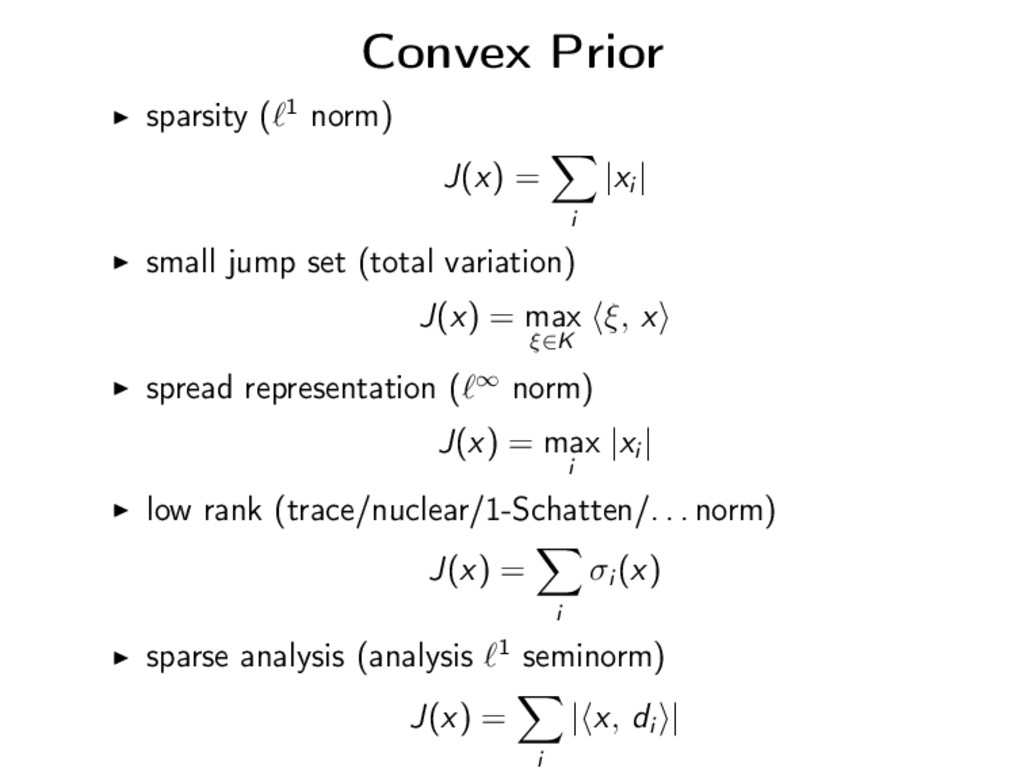
non-smooth promote objects which can be easily described Possible solutions: Union of subspaces Decomposable norm (Candes–Recht) Atomic norm (Chandrasekaran et al.) Decomposable prior (Negahban et al.)
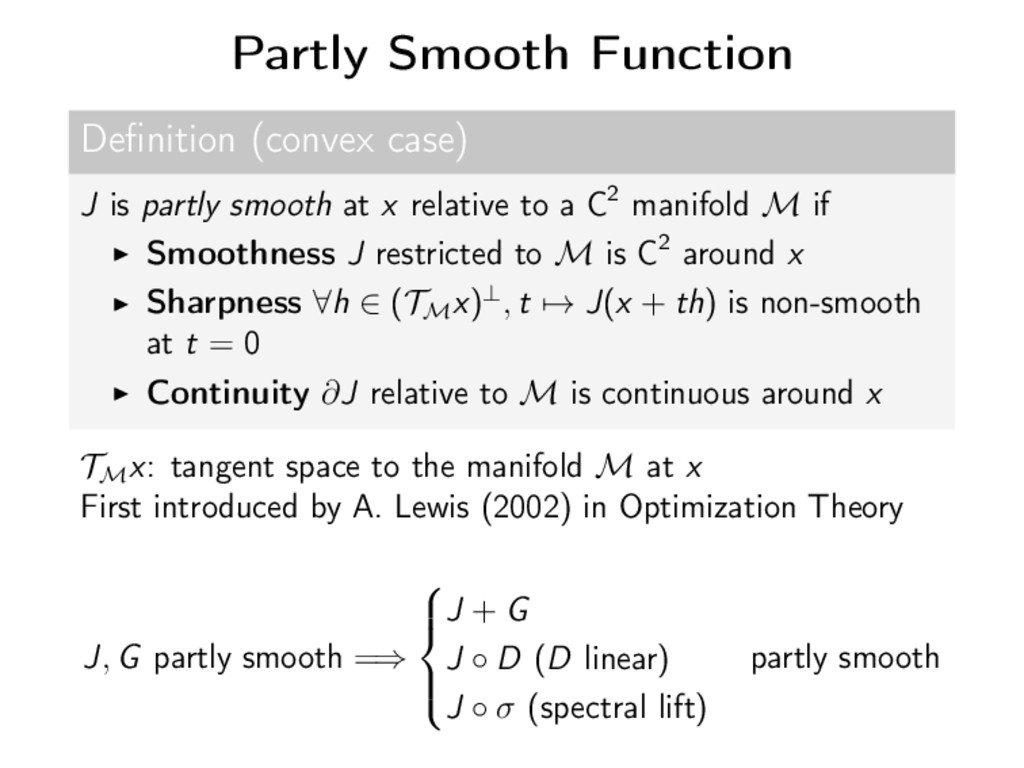
at x relative to a C2 manifold M if Smoothness J restricted to M is C2 around x Sharpness ∀h ∈ (TM x)⊥, t → J(x + th) is non-smooth at t = 0 Continuity ∂J relative to M is continuous around x TM x: tangent space to the manifold M at x First introduced by A. Lewis (2002) in Optimization Theory J, G partly smooth =⇒ J + G J ◦ D (D linear) J ◦ σ (spectral lift) partly smooth
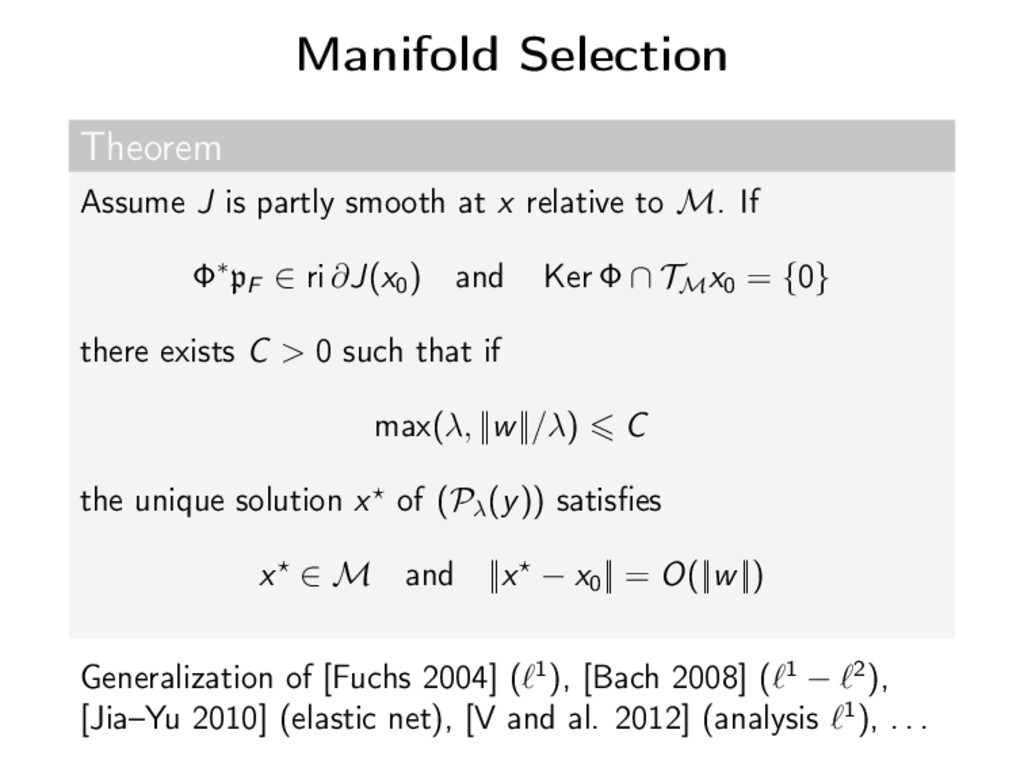
relative to M. If Φ∗pF ∈ ri ∂J(x0 ) and Ker Φ ∩ TM x0 = {0} there exists C > 0 such that if max(λ, ||w||/λ) C the unique solution x of (Pλ (y)) satisfies x ∈ M and ||x − x0 || = O(||w||) Generalization of [Fuchs 2004] ( 1), [Bach 2008] ( 1 − 2), [Jia–Yu 2010] (elastic net), [V and al. 2012] (analysis 1), . . .
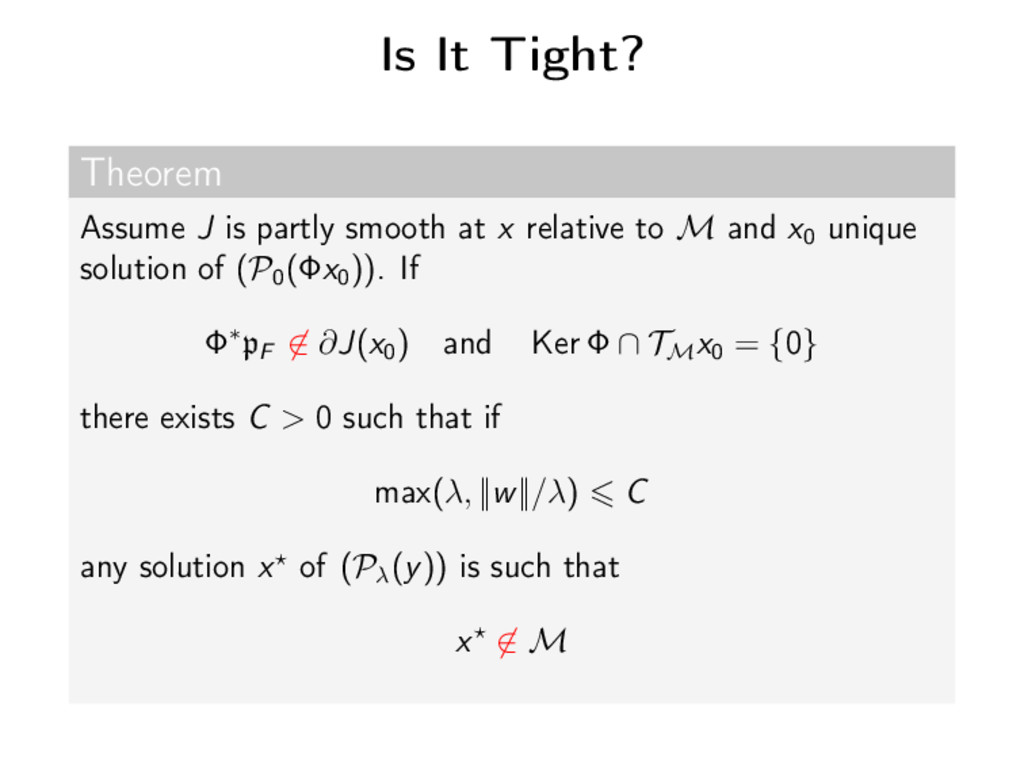
x relative to M and x0 unique solution of (P0 (Φx0 )). If Φ∗pF ∈ ∂J(x0 ) and Ker Φ ∩ TM x0 = {0} there exists C > 0 such that if max(λ, ||w||/λ) C any solution x of (Pλ (y)) is such that x ∈ M
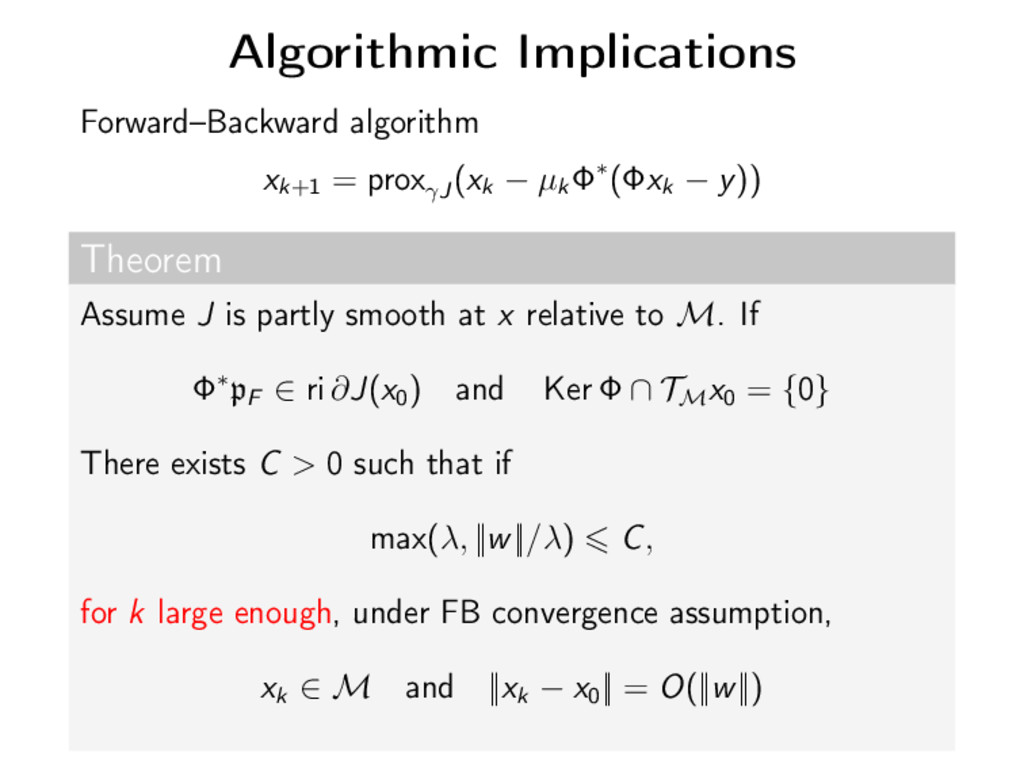
Φ∗(Φxk − y)) Theorem Assume J is partly smooth at x relative to M. If Φ∗pF ∈ ri ∂J(x0 ) and Ker Φ ∩ TM x0 = {0} There exists C > 0 such that if max(λ, ||w||/λ) C, for k large enough, under FB convergence assumption, xk ∈ M and ||xk − x0 || = O(||w||)
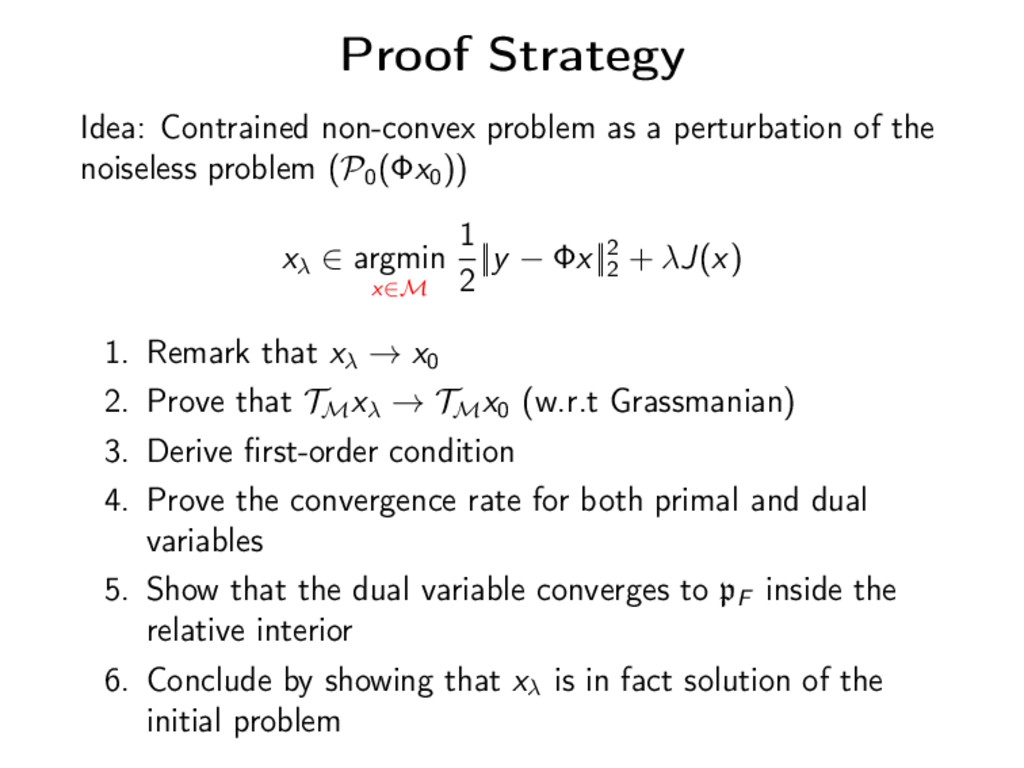
the noiseless problem (P0 (Φx0 )) xλ ∈ argmin x∈M 1 2 ||y − Φx||2 2 + λJ(x) 1. Remark that xλ → x0 2. Prove that TM xλ → TM x0 (w.r.t Grassmanian) 3. Derive first-order condition 4. Prove the convergence rate for both primal and dual variables 5. Show that the dual variable converges to pF inside the relative interior 6. Conclude by showing that xλ is in fact solution of the initial problem
analysis Associated papers: SV, G. Peyré, and J. Fadili Model Consistency of Partly Smooth Regularizers SV, G. Peyré, and J. Fadili Low Complexity Regularization of Linear Inverse Problems Future work: Non-convex case & prior learning Infinite dimensional case: Radon measure: done (Duval & Peyré, 2015) Next step: Bounded variation . . .
analysis Associated papers: SV, G. Peyré, and J. Fadili Model Consistency of Partly Smooth Regularizers SV, G. Peyré, and J. Fadili Low Complexity Regularization of Linear Inverse Problems Future work: Non-convex case & prior learning Infinite dimensional case: Radon measure: done (Duval & Peyré, 2015) Next step: Bounded variation . . . Thanks for your attention!
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}