Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
x86_64での自作OS - サイボウズ・ラボユース 成果発表会
Search
Totsugekitai
March 30, 2020
Programming
770
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
x86_64での自作OS - サイボウズ・ラボユース 成果発表会
Totsugekitai
March 30, 2020
More Decks by Totsugekitai
See All by Totsugekitai
自作OSへの排他制御の実装
totsugekitai
0
630
AHCIに対応したい
totsugekitai
0
660
フルスクラッチOS格闘記 〜タイマ割り込みをメインに〜
totsugekitai
0
860
自作OSのその手前 UEFI OSローダの作成
totsugekitai
0
190
Other Decks in Programming
See All in Programming
技術記事、AIに書かせるか、自分で書くか? 〜それでも私が自分の手で書く理由〜 / #QiitaConference
jnchito
2
1.4k
ユニットテストの先へ:テスト技法で要求・仕様を整理するJava開発実践 / Beyond_Unit_Testing_Practical_Java_Development_Techniques_for_Organizing_Requirements_and_Specifications
shimashima35
0
410
AIで効率化できた業務・日常
ochtum
0
140
AI 時代のソフトウェア設計の学び方
masuda220
PRO
29
13k
軽量Java基盤の設計 DIコンテナに頼らない、長期保守と1秒起動の実現 JJUG CCC 2026 Spring
macha64
0
540
Spring Security 実践 ─ GraphQL APIで実務に役立つ 認証・認可 を学ぶ
wagyu
0
240
Creating Composable Callables in Contemporary C++
rollbear
0
150
Vue × Nuxt × Oxc どこまで使える?実運用の現在地
andpad
0
260
TAKTでAI駆動開発の品質を設計する
j5ik2o
7
1.3k
OSもどきOS
arkw
0
570
TypeScript+Orvalで実現する型安全かつ堅牢でスケーラブルなマルチチャネル通知基盤 / TSKaigi Night talks ~after conference~
d0riven
0
340
ADKを使って簡単にAIエージェントを作ってみよう
k1mu21
0
270
Featured
See All Featured
From Legacy to Launchpad: Building Startup-Ready Communities
dugsong
0
230
GraphQLの誤解/rethinking-graphql
sonatard
75
12k
Primal Persuasion: How to Engage the Brain for Learning That Lasts
tmiket
0
370
Claude Code どこまでも/ Claude Code Everywhere
nwiizo
65
56k
Producing Creativity
orderedlist
PRO
348
40k
Product Roadmaps are Hard
iamctodd
PRO
55
12k
Distributed Sagas: A Protocol for Coordinating Microservices
caitiem20
333
22k
Efficient Content Optimization with Google Search Console & Apps Script
katarinadahlin
PRO
1
630
Context Engineering - Making Every Token Count
addyosmani
9
970
Designing Dashboards & Data Visualisations in Web Apps
destraynor
231
55k
Git: the NoSQL Database
bkeepers
PRO
432
67k
How Fast Is Fast Enough? [PerfNow 2025]
tammyeverts
3
610
Transcript
x86_64での自作OS サイボウズ・ラボユース 成果発表会 広瀬 智之 2020.3.30
自己紹介 • 名前:広瀬智之 • 所属:筑波大学情報科学類 2 年 • サイボウズ・ラボユース 第
9 期 • セキュリティキャンプ 2019 全国大会 OS 開発ゼミ修了 • 今年度は自作 OS をしていました 1
このテーマを選んだ理由 • 学部 1 年の春休みに「30 日ででき る! OS 自作入門」を読み、自作 OS
に興味を持った • 素晴らしい本であるが、今の PC で は動作させづらい • 32bit only • セグメンテーションを用いたメモ リ管理 • フロッピーディスクの使用 Figure 1: OS 自作入門 -> 今の PC でも動かせる自作 OS をやろう! 2
minOS(私の自作 OS)の概観 • CPU は 64bit モードを前提に作成 • UEFI 対応
• スレッド機能を実装し並行処理を実現 • ページングでメモリを初期化 • 割り込みを用いたシリアル通信 • AHCI(SATA コントローラ)のドライバを実装 • SATA 接続されたストレージへの(原始的な)読み書き ができます 以下のリポジトリで公開しています https://github.com/Totsugekitai/minOSv2 3
minOS(私の自作 OS)の概観 • CPU は 64bit モードを前提に作成 • UEFI 対応
• スレッド機能を実装し並行処理を実現 • ページングでメモリを初期化 • 割り込みを用いたシリアル通信 • AHCI(SATA コントローラ)のドライバを実装 • SATA 接続されたストレージへの(原始的な)読み書き ができます 以下のリポジトリで公開しています https://github.com/Totsugekitai/minOSv2 4
スレッドとは • 実行中のプログラム単位 = プログラムコード + 状態 • スレッドの状態を構成するもの =
レジスタの値 • スレッドの切り替え -> 今のスレッドのレジスタ値をストア -> 次のスレッドのレジスタ値をロード -> 次のスレッドのコードにジャンプ • レジスタ値のストア先 = 各スレッドのスタック 5
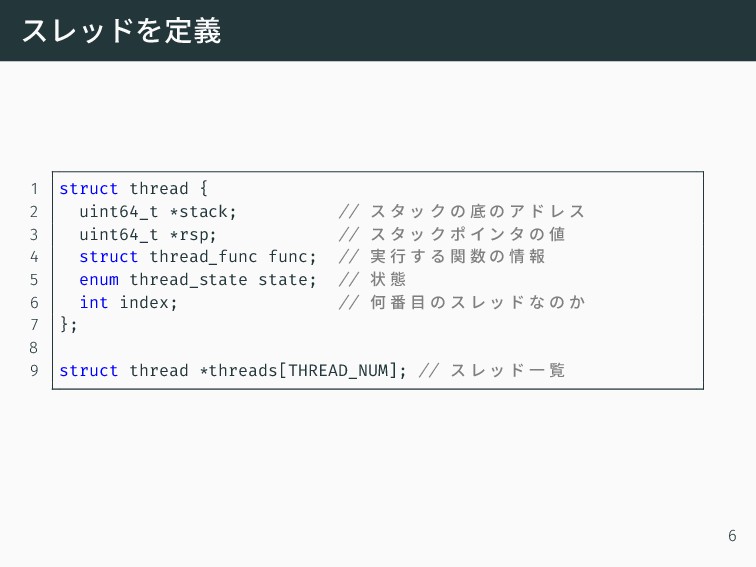
スレッドを定義 1 struct thread { 2 uint64_t *stack; // ス
タ ッ ク の 底 の ア ド レ ス 3 uint64_t *rsp; // ス タ ッ ク ポ イ ン タ の 値 4 struct thread_func func; // 実 行 す る 関 数 の 情 報 5 enum thread_state state; // 状 態 6 int index; // 何 番 目 の ス レ ッ ド な の か 7 }; 8 9 struct thread *threads[THREAD_NUM]; // ス レ ッ ド 一 覧 6
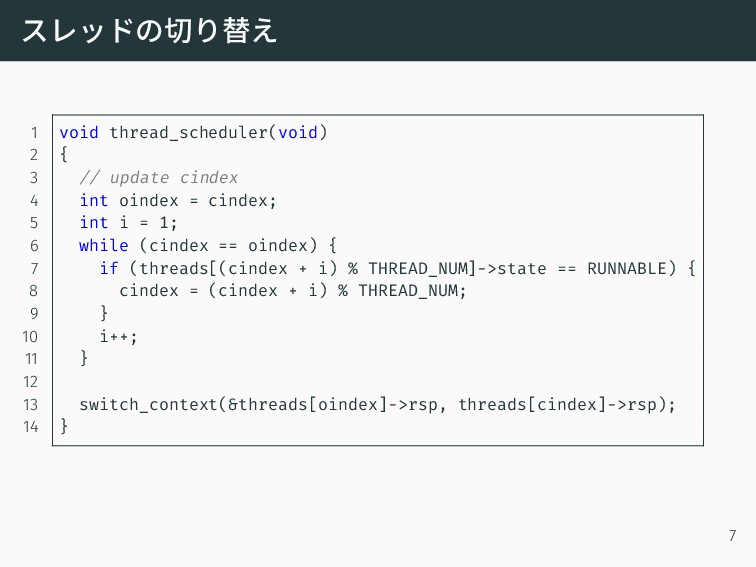
スレッドの切り替え 1 void thread_scheduler(void) 2 { 3 // update cindex
4 int oindex = cindex; 5 int i = 1; 6 while (cindex == oindex) { 7 if (threads[(cindex + i) % THREAD_NUM]->state == RUNNABLE) { 8 cindex = (cindex + i) % THREAD_NUM; 9 } 10 i++; 11 } 12 13 switch_context(&threads[oindex]->rsp, threads[cindex]->rsp); 14 } 7
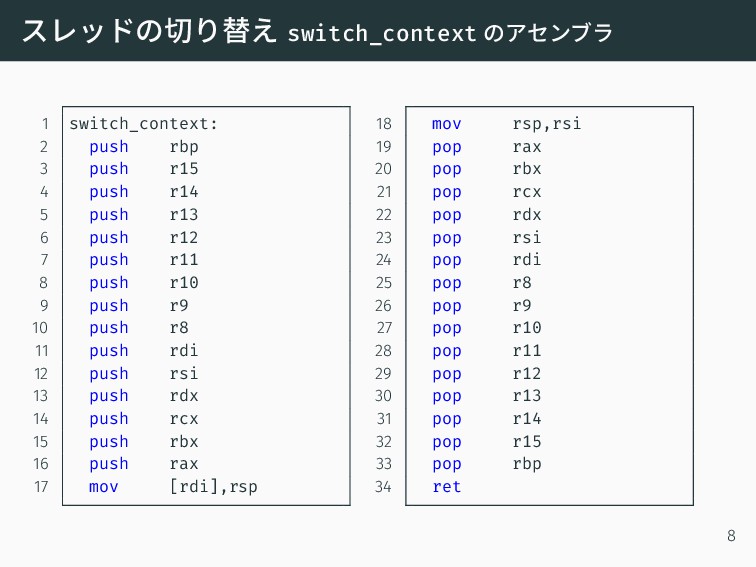
スレッドの切り替え switch_context のアセンブラ 1 switch_context: 2 push rbp 3 push
r15 4 push r14 5 push r13 6 push r12 7 push r11 8 push r10 9 push r9 10 push r8 11 push rdi 12 push rsi 13 push rdx 14 push rcx 15 push rbx 16 push rax 17 mov [rdi],rsp 18 mov rsp,rsi 19 pop rax 20 pop rbx 21 pop rcx 22 pop rdx 23 pop rsi 24 pop rdi 25 pop r8 26 pop r9 27 pop r10 28 pop r11 29 pop r12 30 pop r13 31 pop r14 32 pop r15 33 pop rbp 34 ret 8
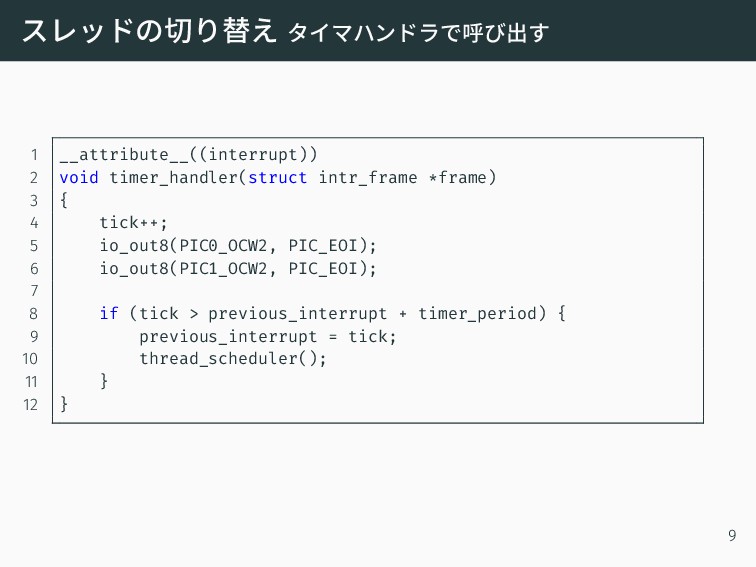
スレッドの切り替え タイマハンドラで呼び出す 1 __attribute__((interrupt)) 2 void timer_handler(struct intr_frame *frame) 3
{ 4 tick++; 5 io_out8(PIC0_OCW2, PIC_EOI); 6 io_out8(PIC1_OCW2, PIC_EOI); 7 8 if (tick > previous_interrupt + timer_period) { 9 previous_interrupt = tick; 10 thread_scheduler(); 11 } 12 } 9
実装で苦労した部分 • 最初は ret を iret にしていた • スケジューラはタイマ割り込み中に呼び出し ->
iret のほうが行儀良さそう? • iret はスタックの調整が大変で、いくら調整し直して もずれが発生していた • ret を代わりに使うようにしたら 30 分で動いた Simple is the best! 10
まとめ • x86_64 アーキテクチャで自作 OS をした • スレッドを実装し並行処理ができるようになった • 他にも以下のような機能を実装した
• 割り込みを用いたシリアル通信 • ページングを用いたメモリ初期化 • AHCI のドライバを実装してストレージの読み書き • これからしたいこと • ファイルシステムの実装 • ドキュメントを充実させる 11
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}