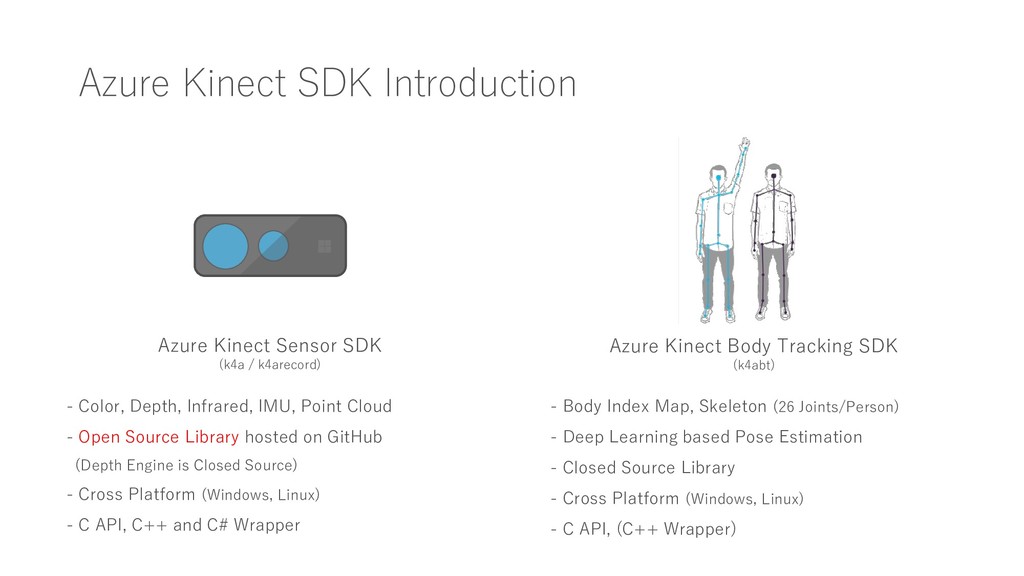
k4arecord) Azure Kinect Body Tracking SDK (k4abt) - Color, Depth, Infrared, IMU, Point Cloud - Open Source Library hosted on GitHub (Depth Engine is Closed Source) - Cross Platform (Windows, Linux) - C API, C++ and C# Wrapper - Body Index Map, Skeleton (26 Joints/Person) - Deep Learning based Pose Estimation - Closed Source Library - Cross Platform (Windows, Linux) - C API, (C++ Wrapper)
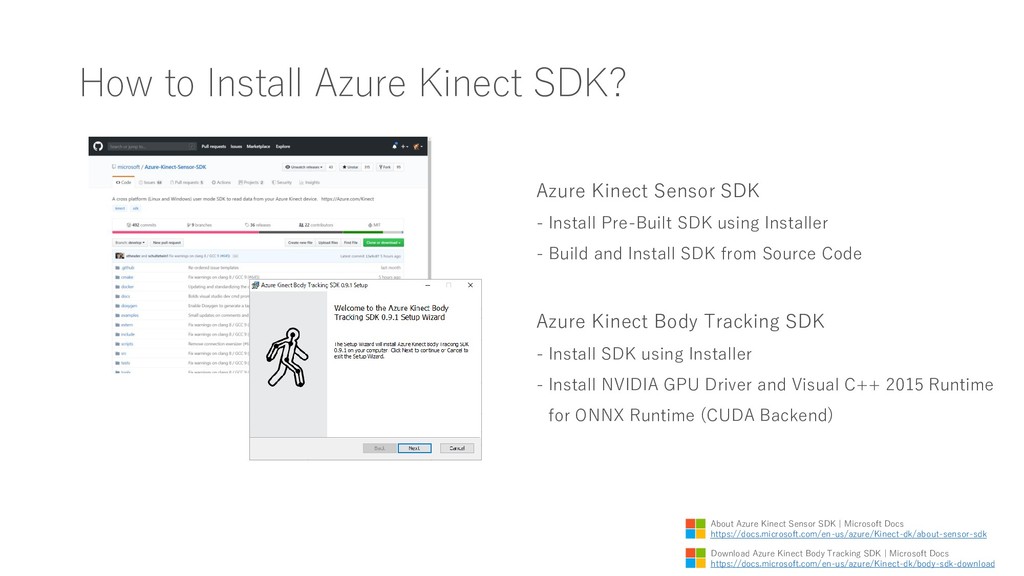
- Install Pre-Built SDK using Installer - Build and Install SDK from Source Code Azure Kinect Body Tracking SDK - Install SDK using Installer - Install NVIDIA GPU Driver and Visual C++ 2015 Runtime for ONNX Runtime (CUDA Backend) Download Azure Kinect Body Tracking SDK | Microsoft Docs https://docs.microsoft.com/en-us/azure/Kinect-dk/body-sdk-download About Azure Kinect Sensor SDK | Microsoft Docs https://docs.microsoft.com/en-us/azure/Kinect-dk/about-sensor-sdk
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}