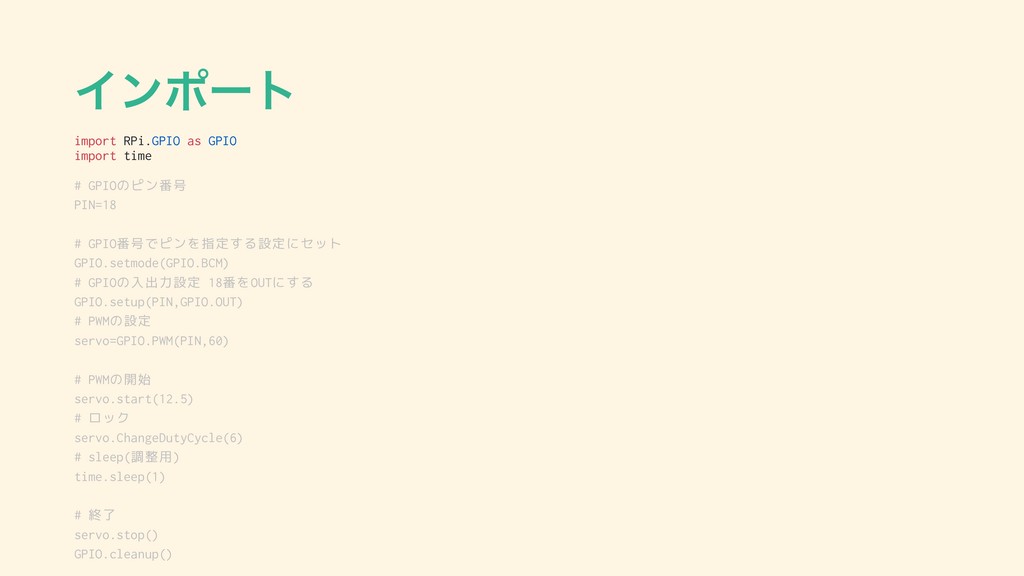
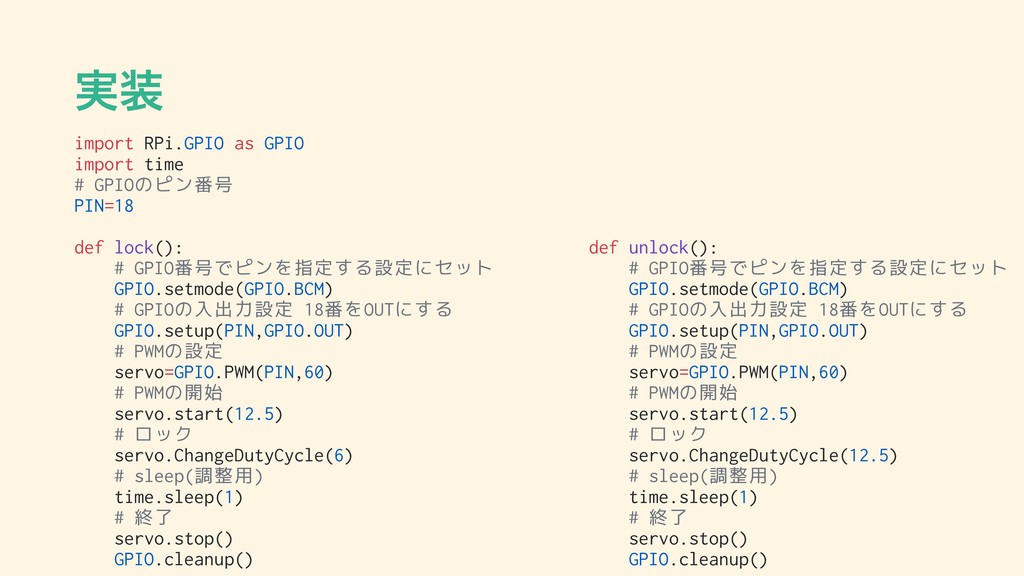
def lock(): # GPIO番号でピンを指定する設定にセット GPIO.setmode(GPIO.BCM) # GPIOの入出力設定 18番をOUTにする GPIO.setup(PIN,GPIO.OUT) # PWMの設定 servo=GPIO.PWM(PIN,60) # PWMの開始 servo.start(12.5) # ロック servo.ChangeDutyCycle(6) # sleep(調整用) time.sleep(1) # 終了 servo.stop() GPIO.cleanup() def unlock(): # GPIO番号でピンを指定する設定にセット GPIO.setmode(GPIO.BCM) # GPIOの入出力設定 18番をOUTにする GPIO.setup(PIN,GPIO.OUT) # PWMの設定 servo=GPIO.PWM(PIN,60) # PWMの開始 servo.start(12.5) # ロック servo.ChangeDutyCycle(12.5) # sleep(調整用) time.sleep(1) # 終了 servo.stop() GPIO.cleanup()
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}