Share
関東Kaggler会の発表資料 https://kanto-kaggler.connpass.com/event/362280/
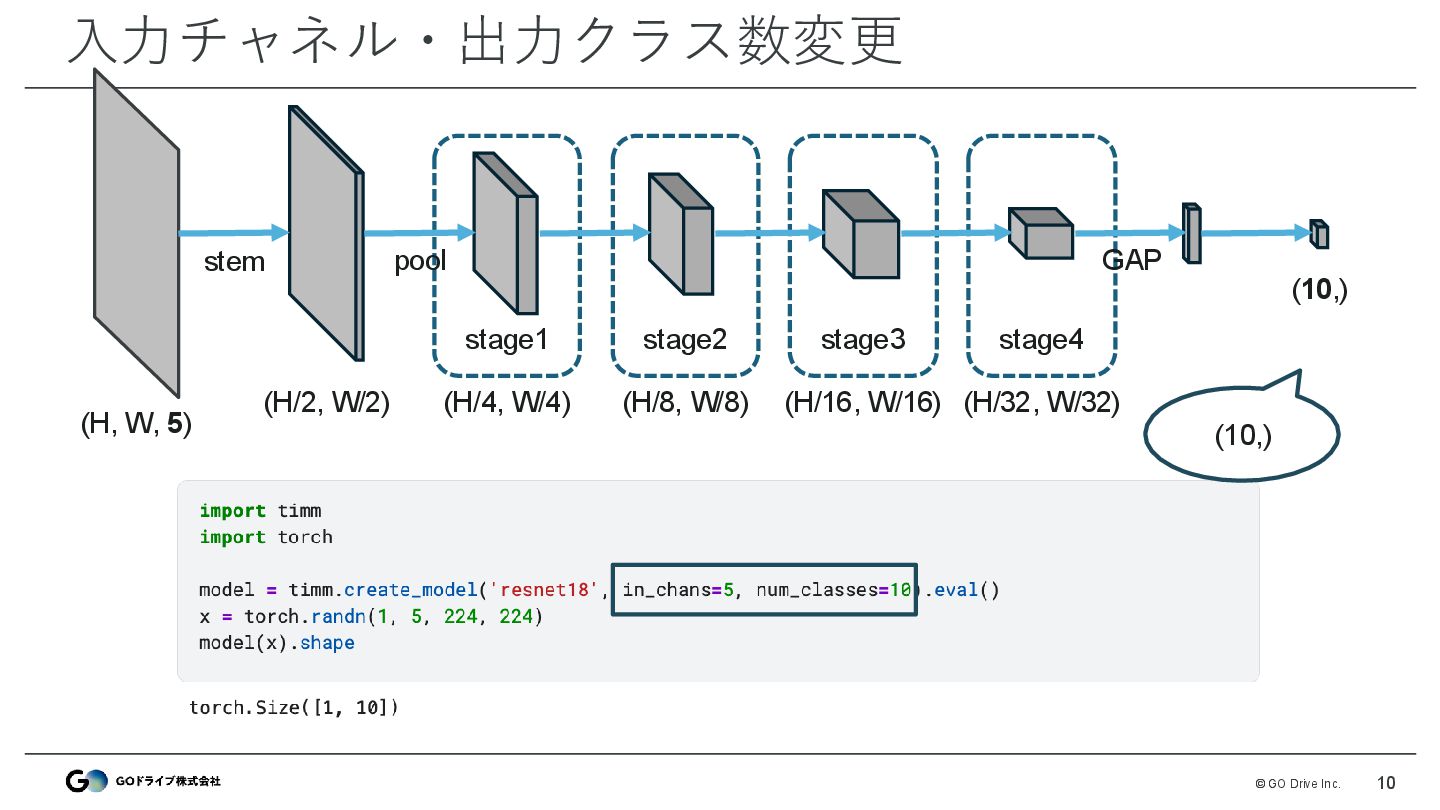
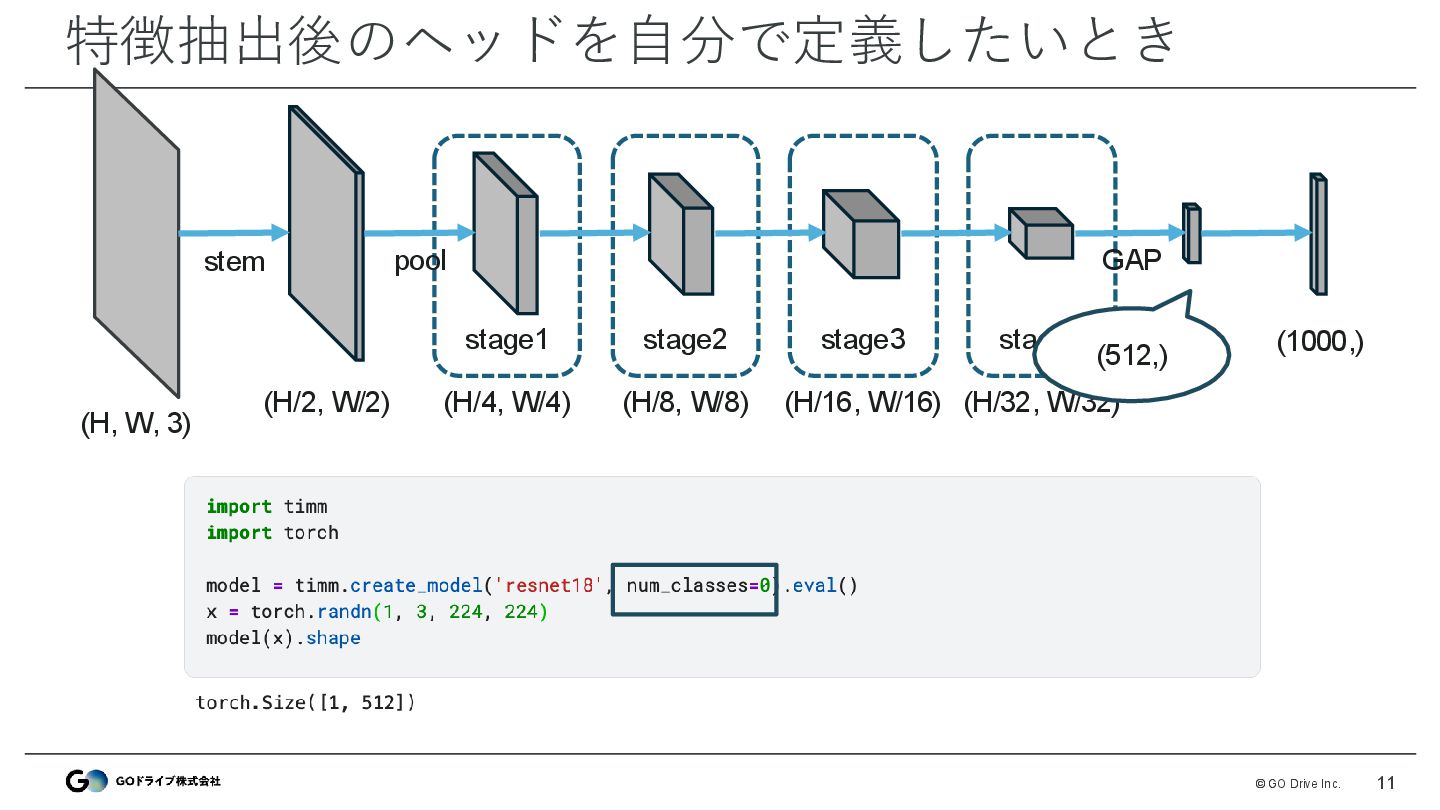
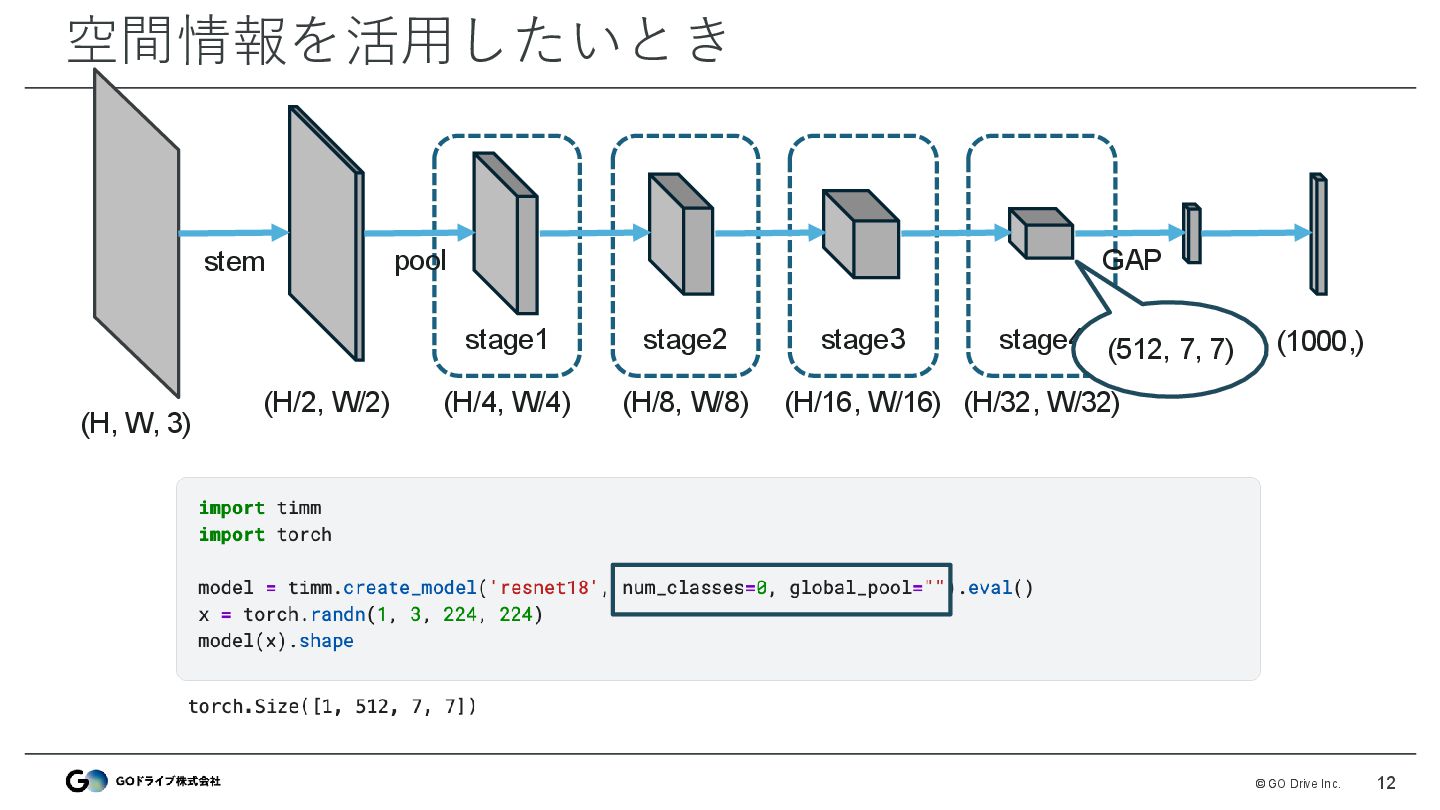
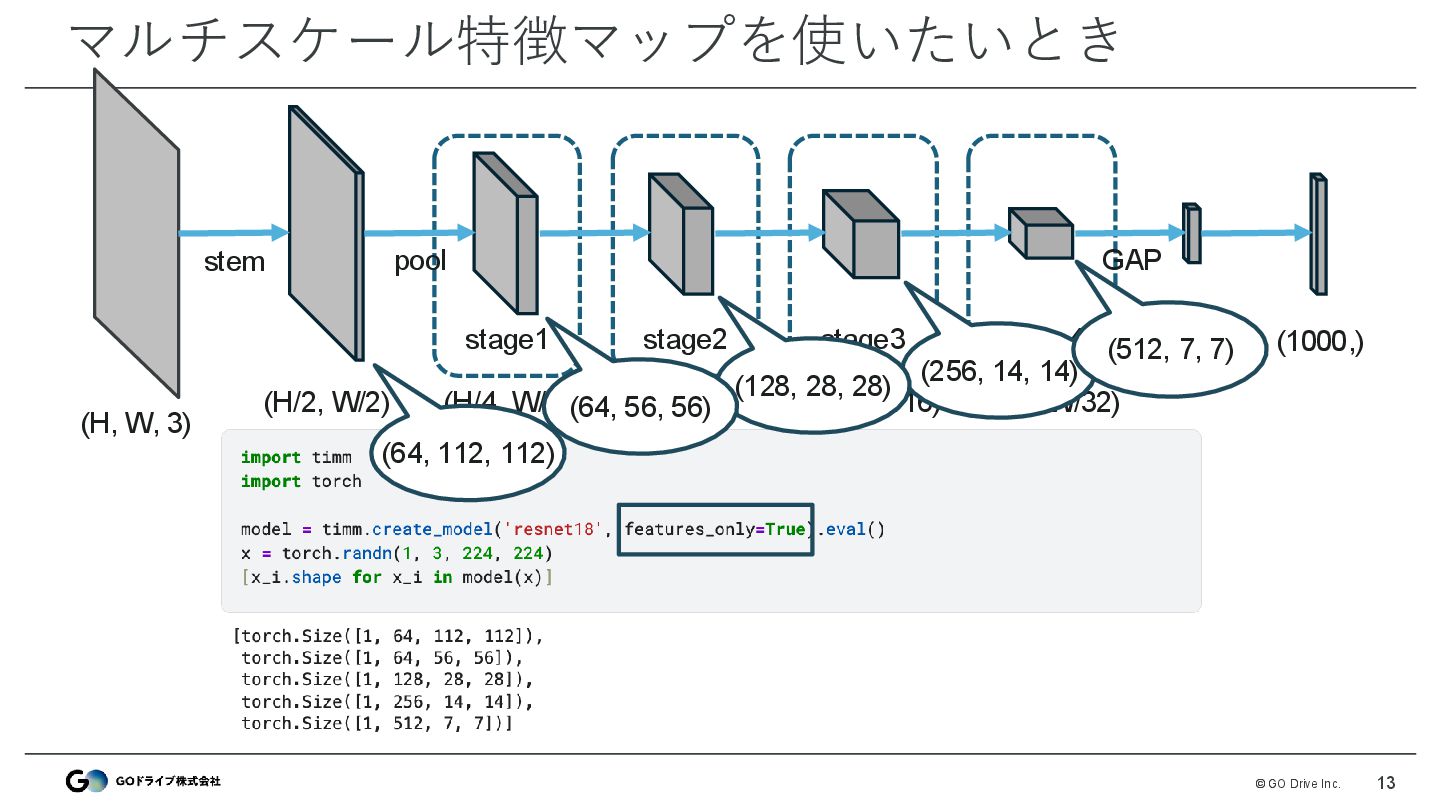
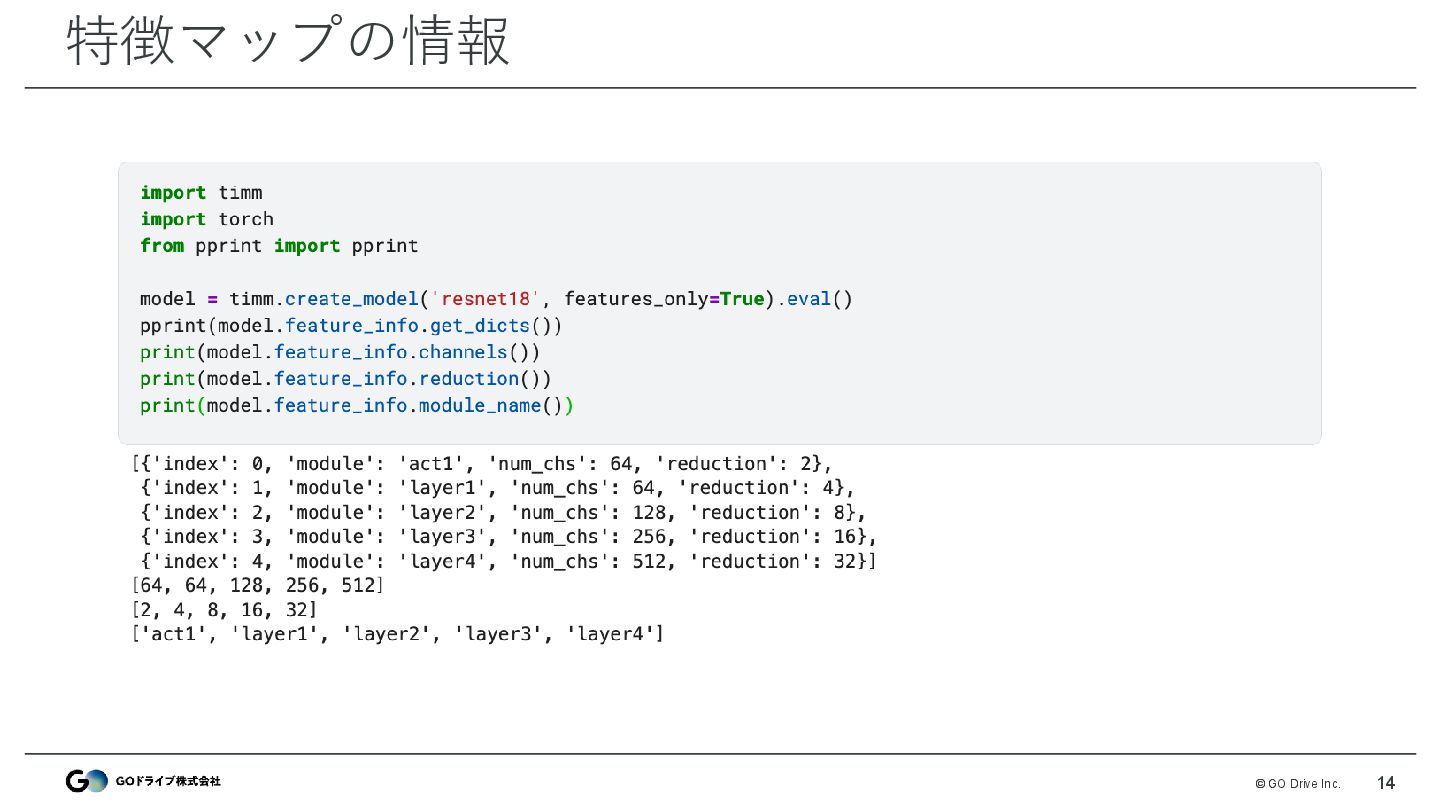
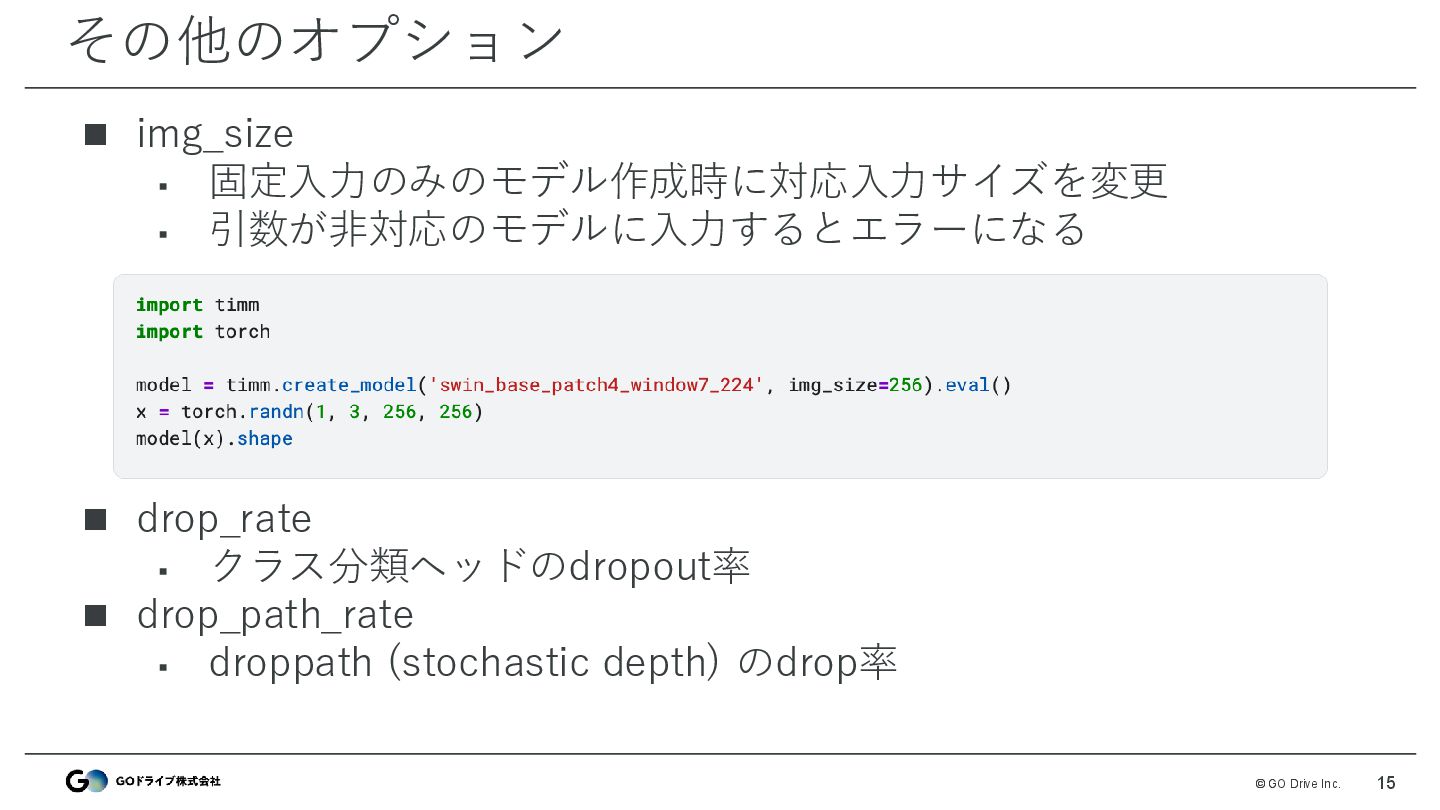
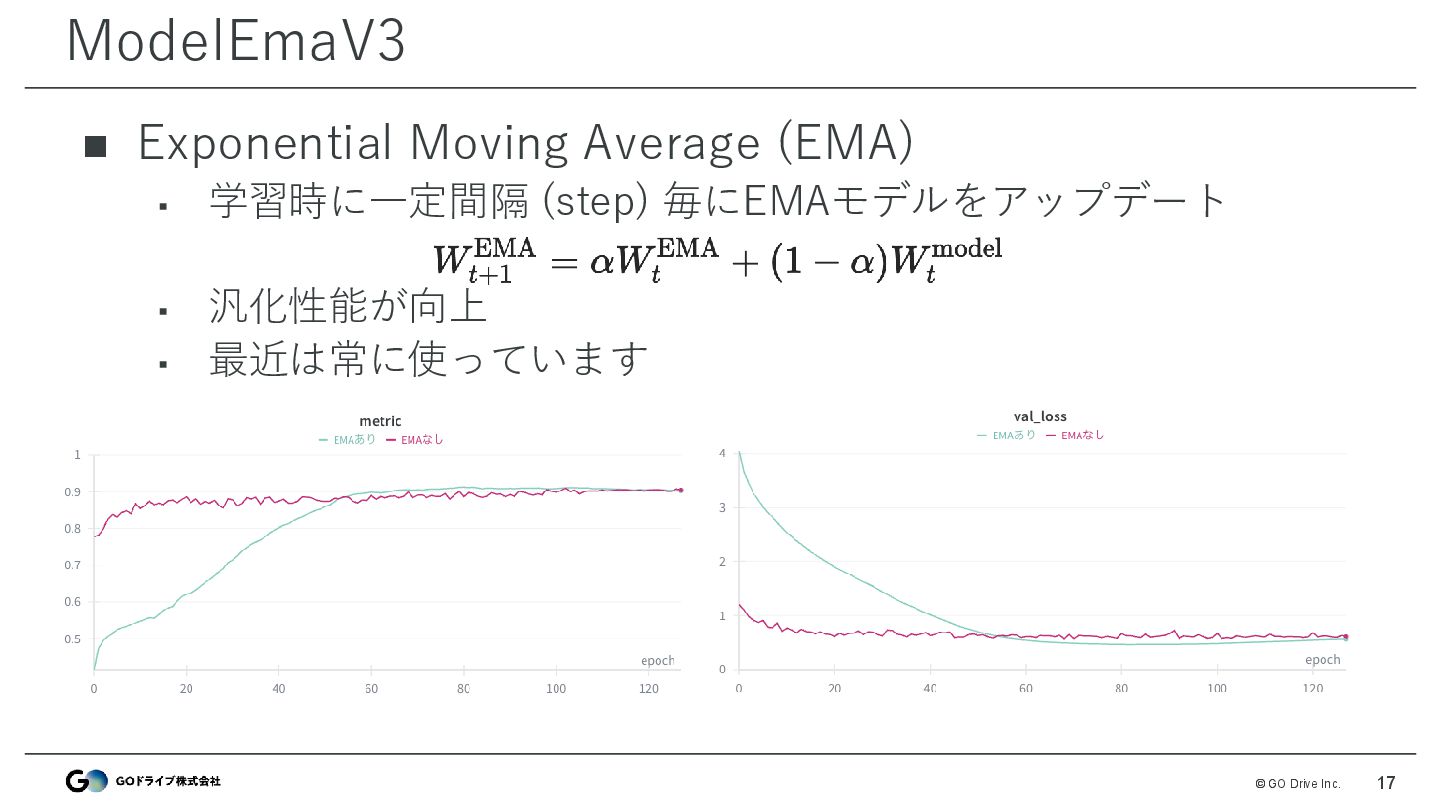
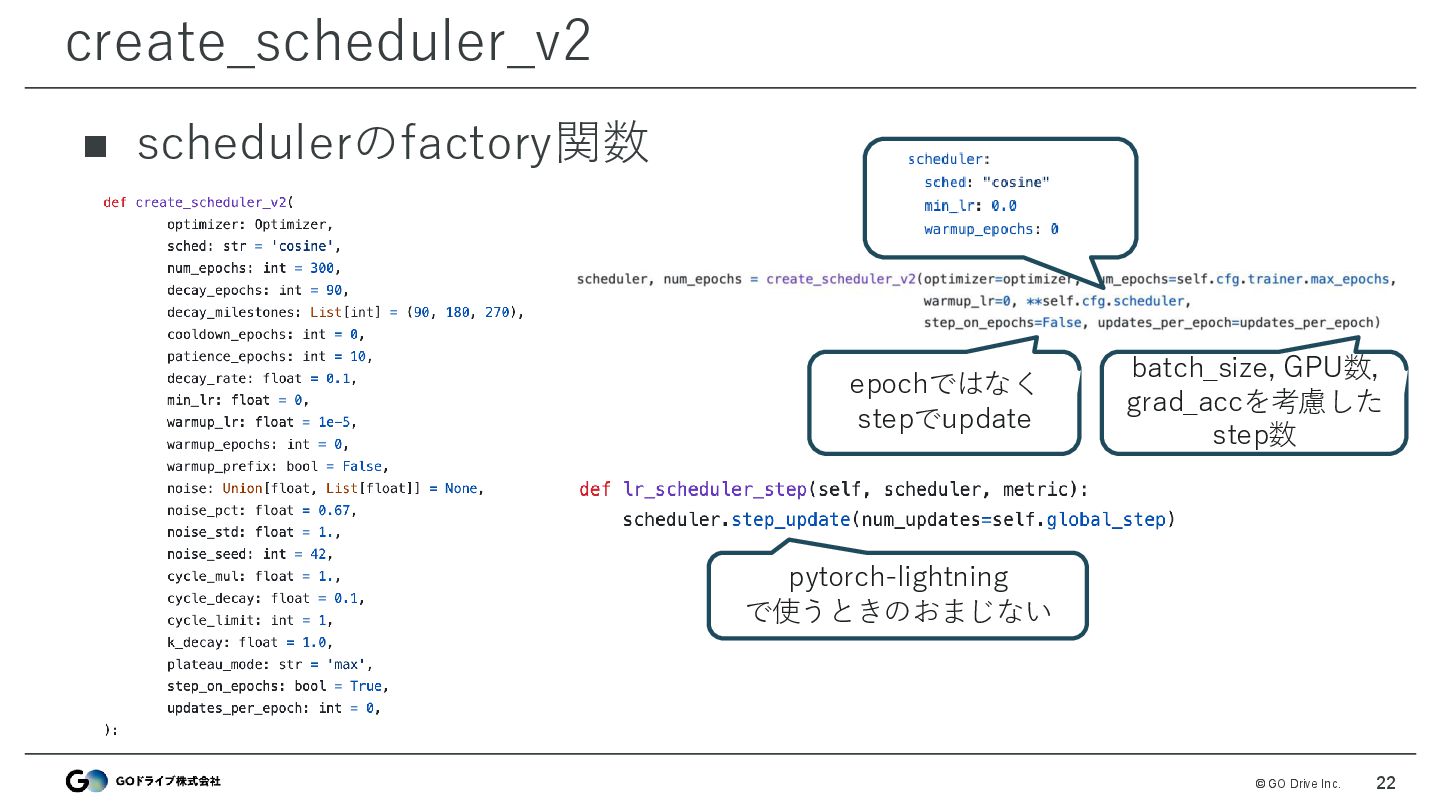
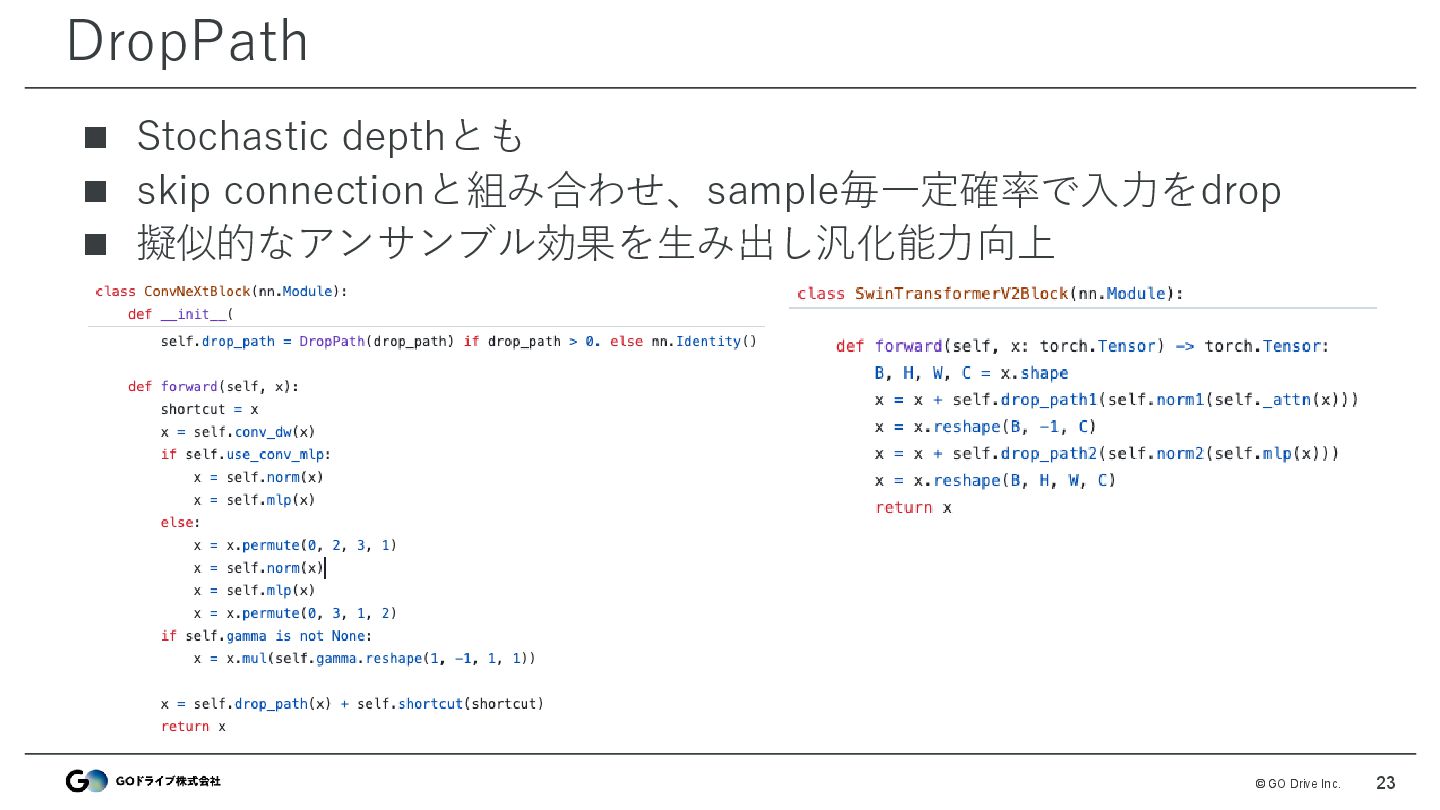
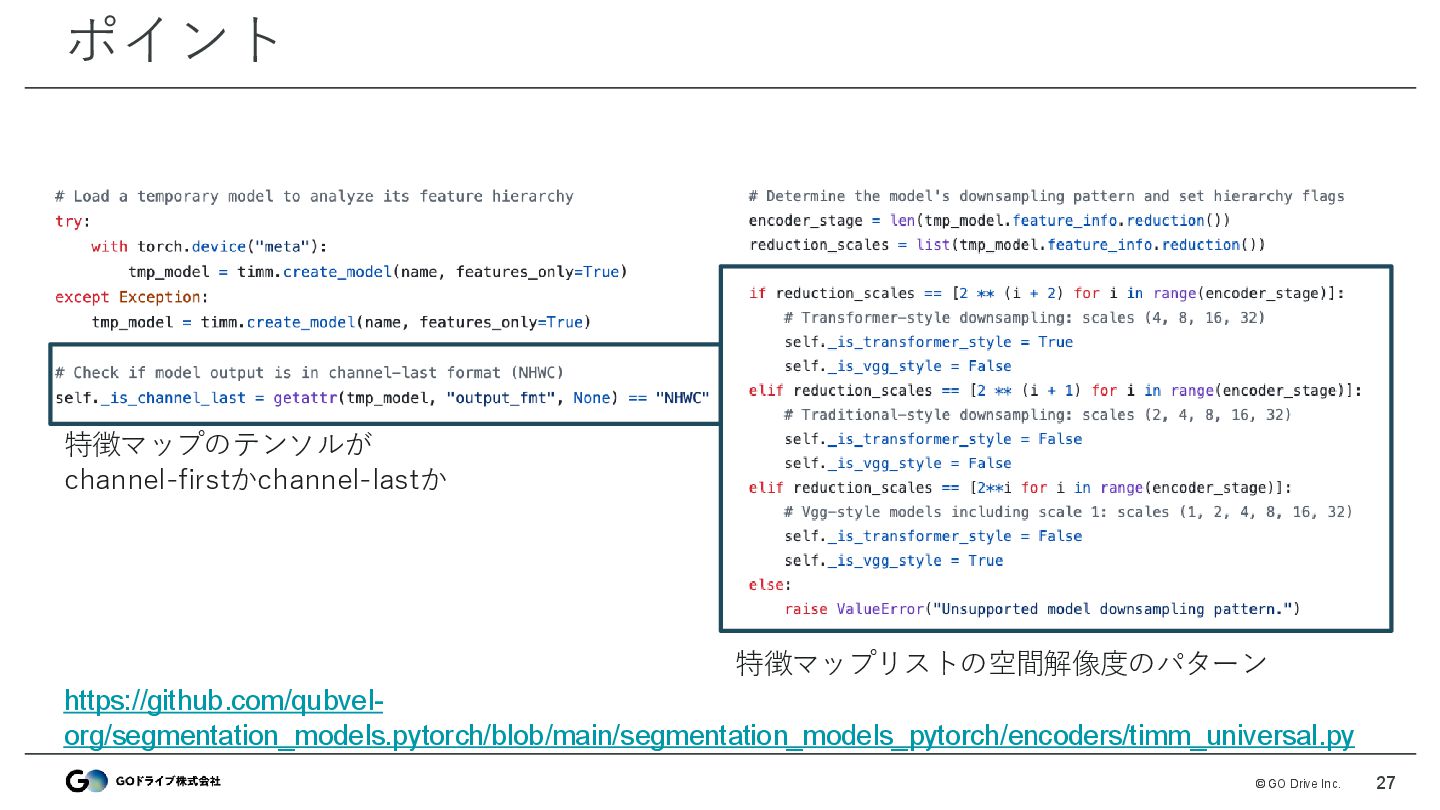
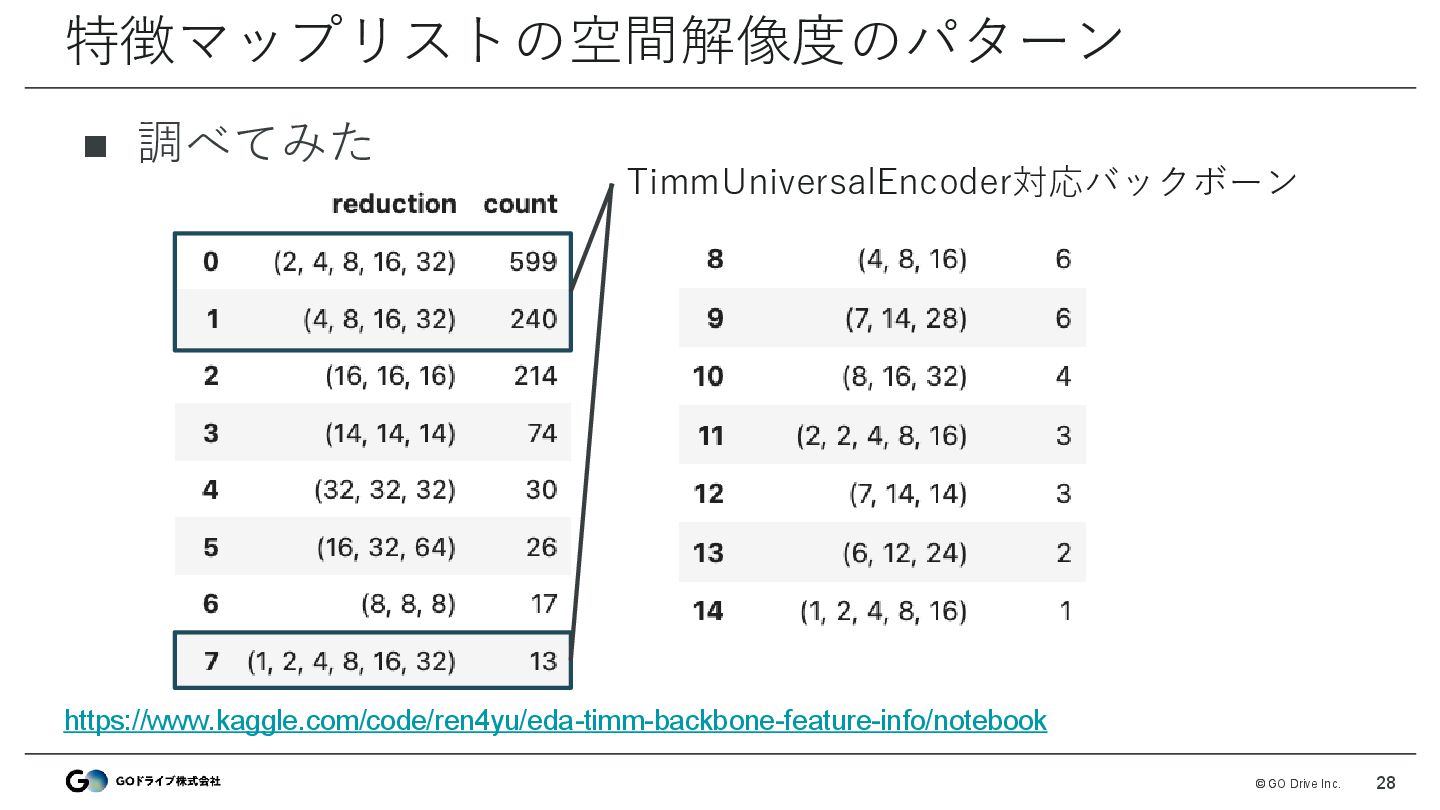
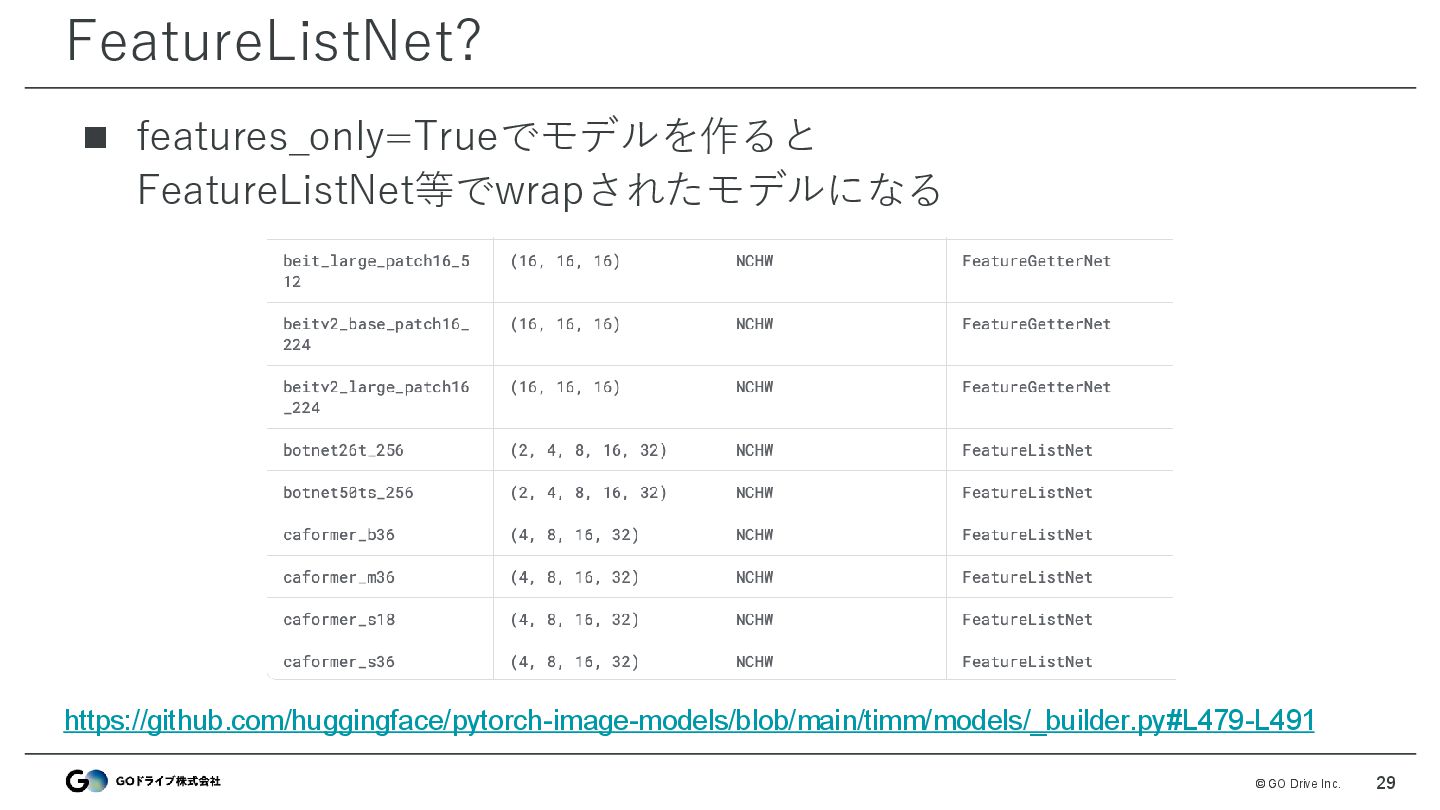
timmの基本的な使い方から、timmの便利なモジュールの紹介、smpのTimmUniversalEncoderを参照しながら抽出できる特徴マップのバリエーション等を紹介しています。
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}