Environments Using Stein Particle Filters [1] X. Zhou, et al., Swarm of micro flying robots in the wild, Science Robotics, 2022. [2] H. Xu, et al., D2SLAM: Decentralized and Distributed Collaborative Visual-Inertial SLAM System for Aerial Swarm, Transaction on Robotics, 2024. [3] K. Koide, et al., MegaParticles: Range-based 6-DoF Monte Carlo Localization with GPU- Accelerated Stein Particle Filter, 2024. [4] Q. Liu, et al., Stein Variational Gradient descent: a general purpose Bayesian inference algorithm, In Proceedings of the 30th International Conference on Neural Information Processing Systems, 2016. [5] S. Boyd, et al., Distributed Optimization and Statistical Learning via the Alternating Direction Method of Multipliers, Foundation and Trends in Machine Learning, 2010.
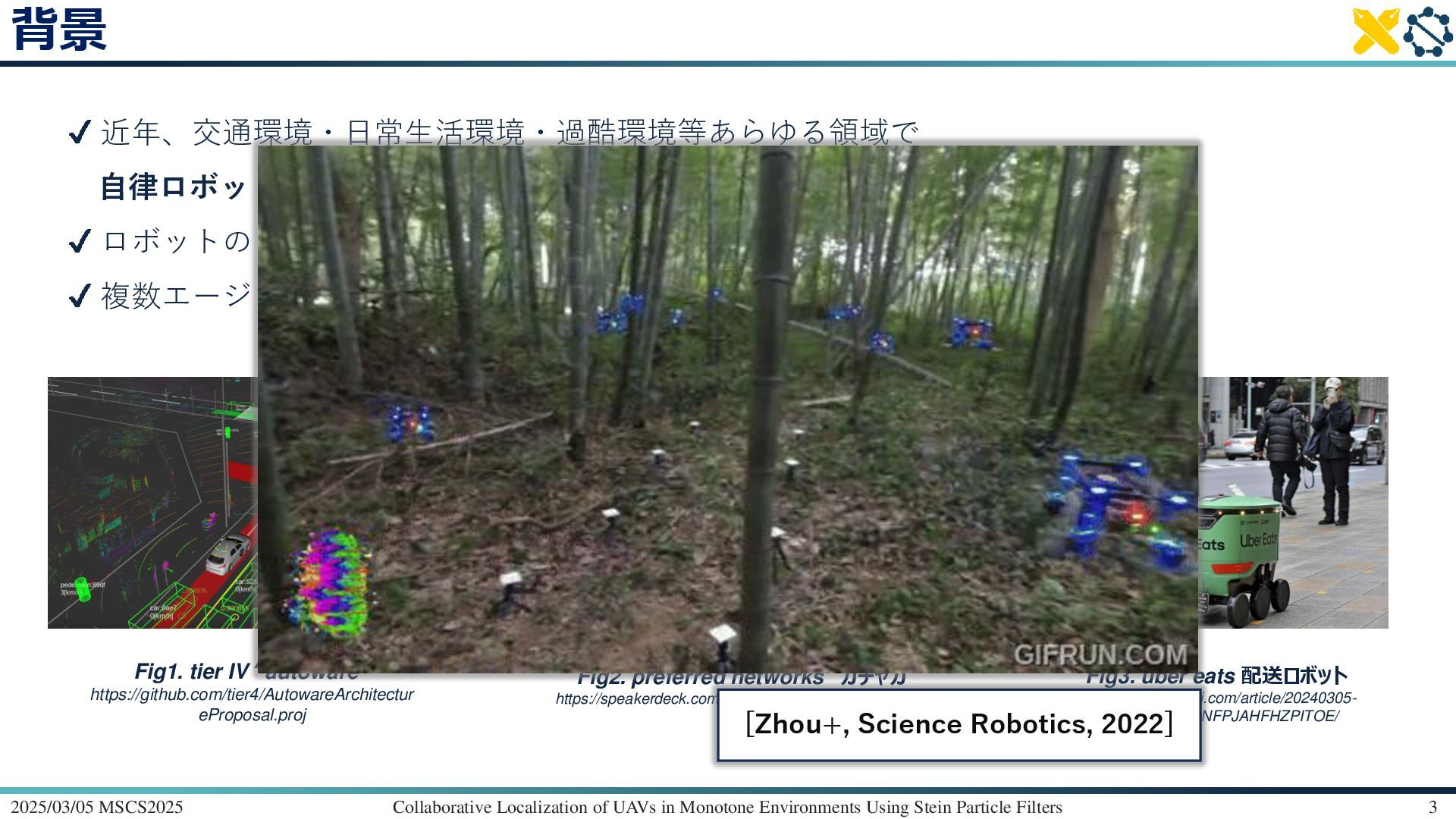
{kind=link}
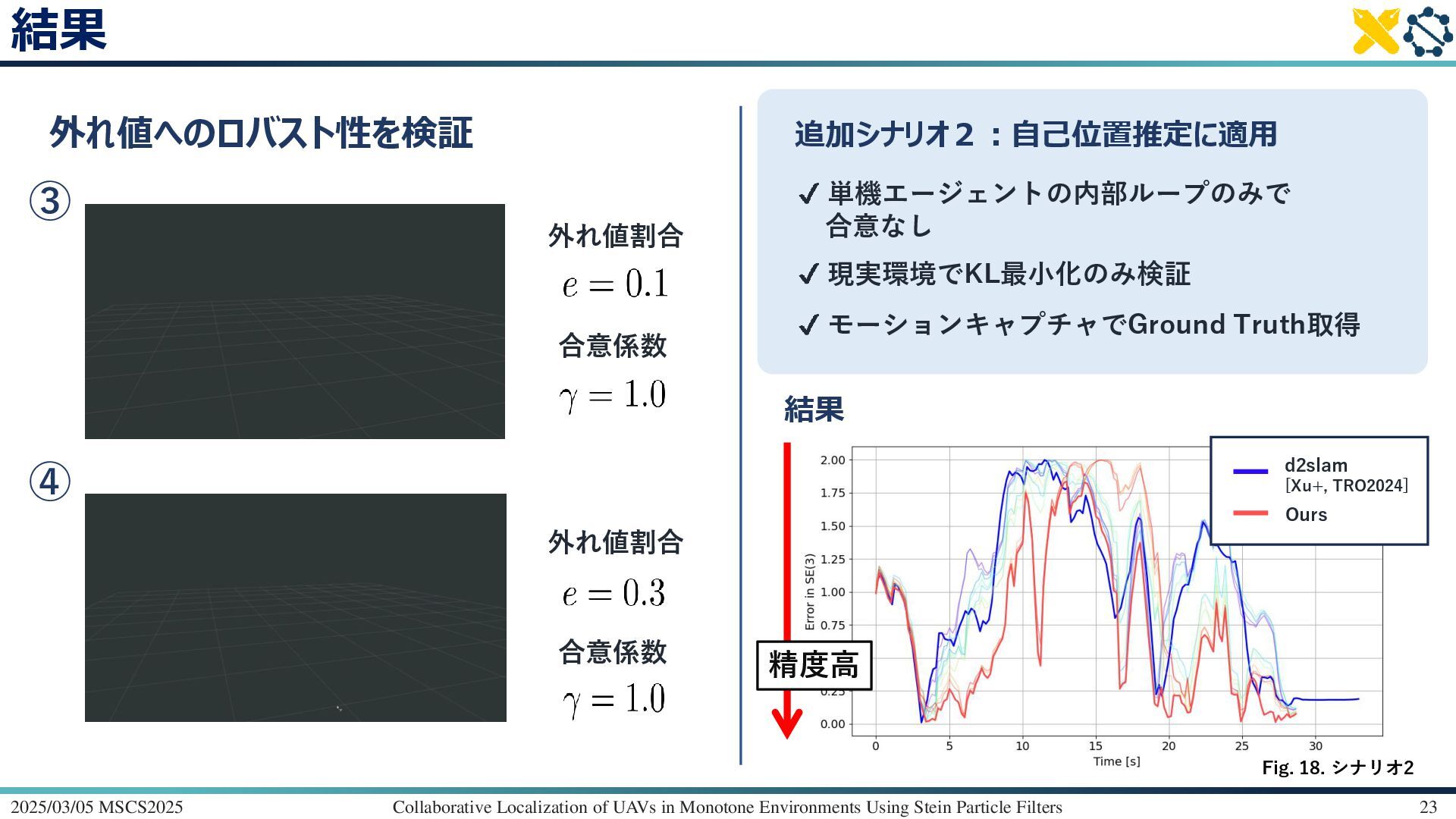
{kind=link}
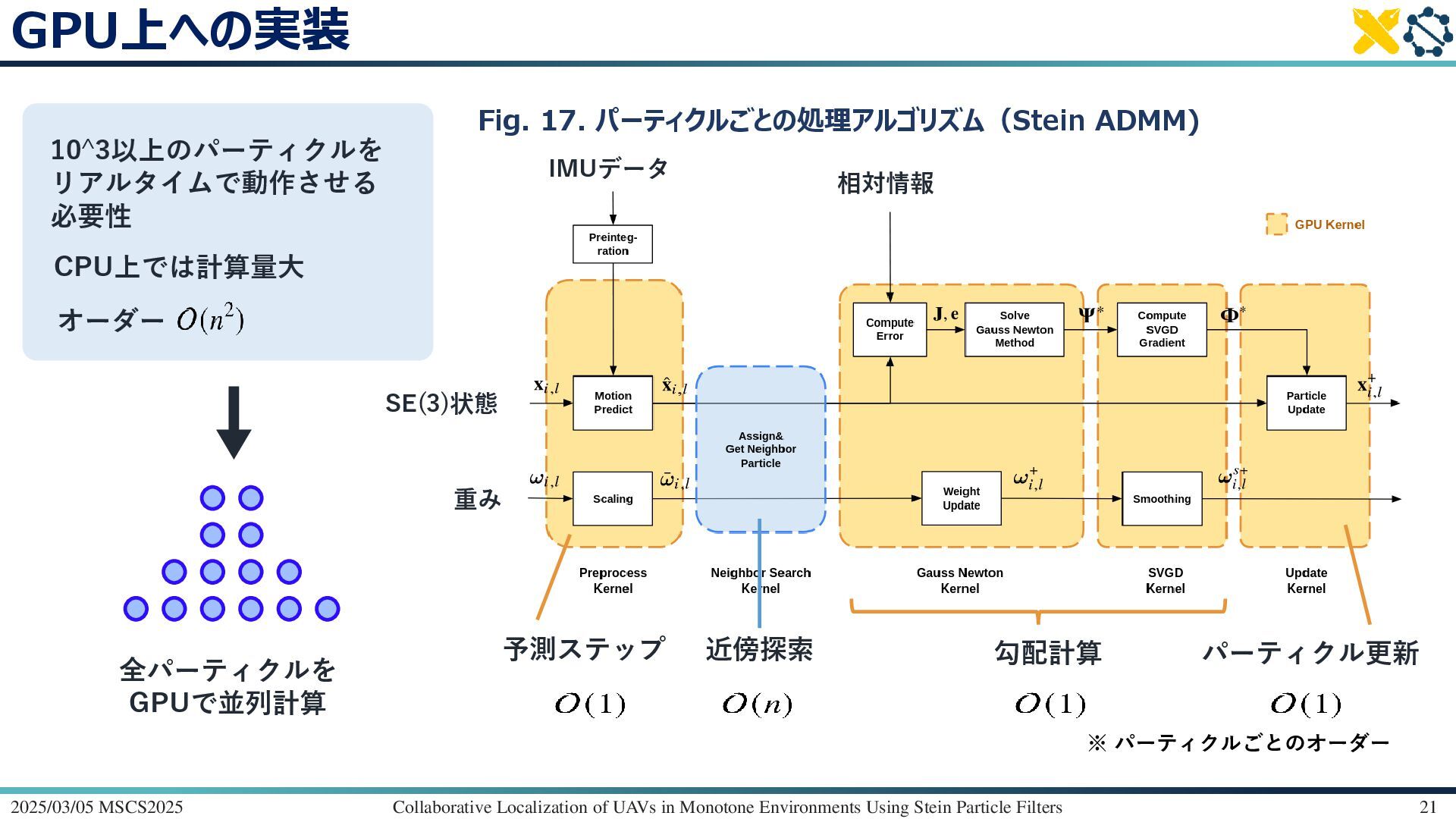
{kind=link}
{kind=link}
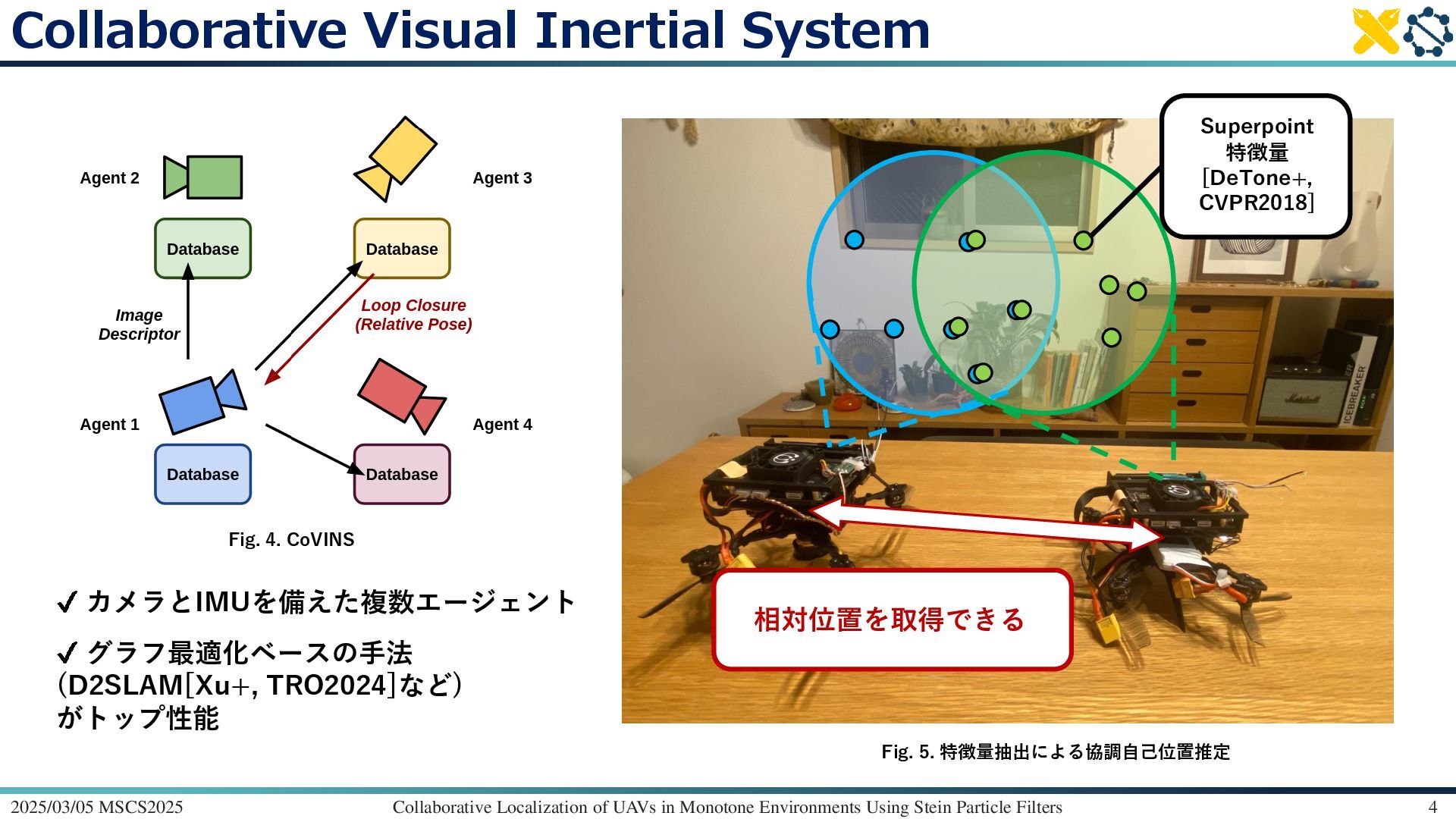
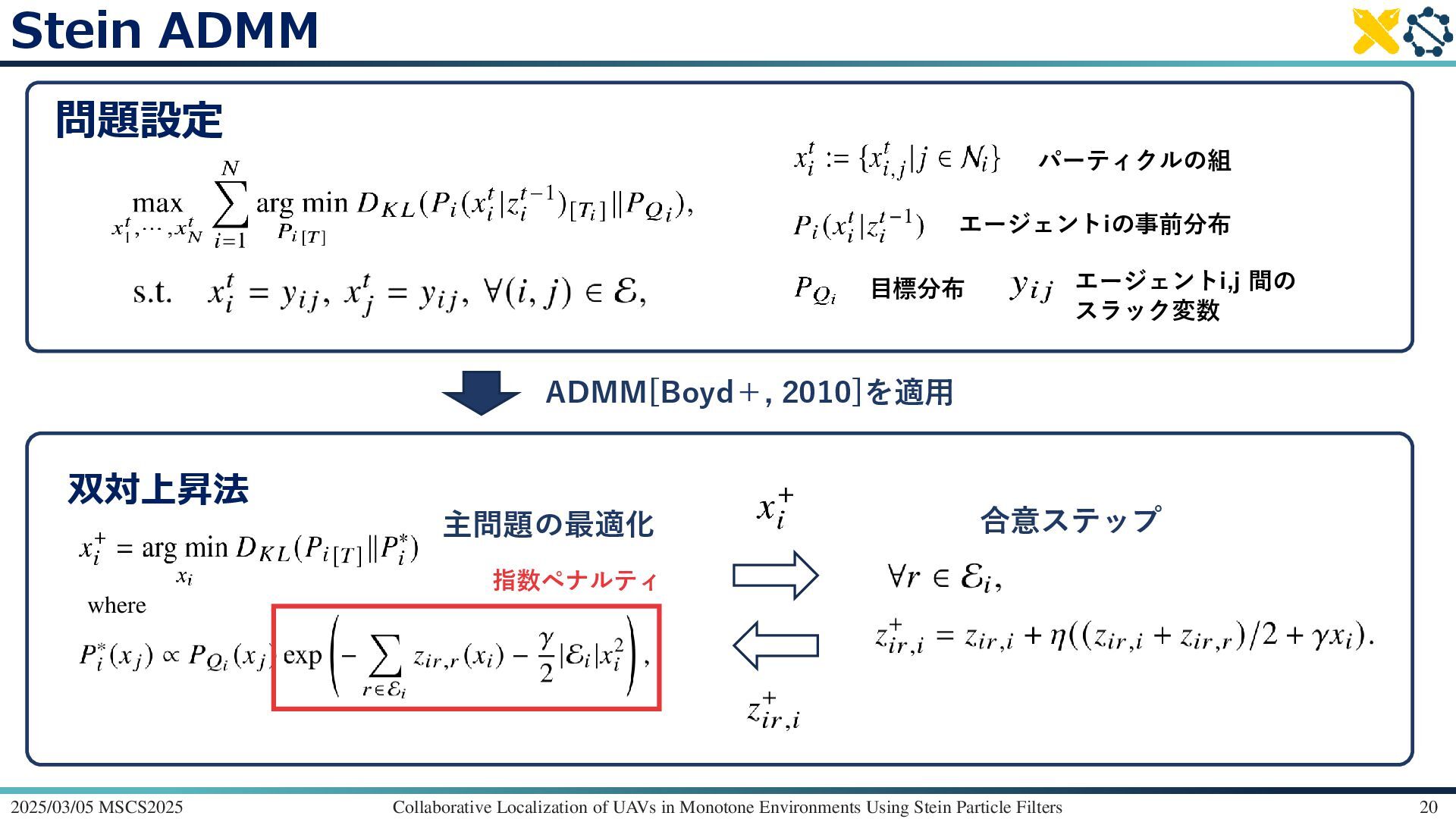
![グラフ最適化ベースの手法 (D2SLAM[Xu+, TRO2024]など) がトップ性能 カメラとIMUを備えた複数エージェント Fig. 1. CoVINS 相対位置を取得できる Superpoint](https://files.speakerdeck.com/presentations/5d3939bdf21546a6a6b93b287077cfd5/slide_4.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}