Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
未踏成果報告会スライド
Search
Tomoki Arita
March 12, 2025
83
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
未踏成果報告会スライド
Tomoki Arita
March 12, 2025
More Decks by Tomoki Arita
See All by Tomoki Arita
Feature-Driven Field-of-View Overlap Assurance with Control Barrier Functions for Cooperative Visual Localization
allegorywrite
0
63
Stein Particle Filterを用いた 単調環境における協調自己位置推定
allegorywrite
0
210
機械学習に基づく中山間地域向け農業用散布ドローン群 マルチエージェント・マルチロボットプランニング研究会 2024
allegorywrite
0
67
農業用小型ドローンによる果樹の栽培支援 KLL-ONE 学生ビジネスコンテスト
allegorywrite
0
83
未踏ナイトLTスライド
allegorywrite
0
37
Featured
See All Featured
Exploring the relationship between traditional SERPs and Gen AI search
raygrieselhuber
PRO
2
4.2k
Building a A Zero-Code AI SEO Workflow
portentint
PRO
0
640
How GitHub (no longer) Works
holman
316
150k
RailsConf & Balkan Ruby 2019: The Past, Present, and Future of Rails at GitHub
eileencodes
141
35k
Designing Powerful Visuals for Engaging Learning
tmiket
1
460
A Modern Web Designer's Workflow
chriscoyier
698
190k
YesSQL, Process and Tooling at Scale
rocio
174
15k
Mozcon NYC 2025: Stop Losing SEO Traffic
samtorres
1
420
Odyssey Design
rkendrick25
PRO
2
730
What does AI have to do with Human Rights?
axbom
PRO
1
2.3k
Taking LLMs out of the black box: A practical guide to human-in-the-loop distillation
inesmontani
PRO
3
2.3k
Raft: Consensus for Rubyists
vanstee
141
7.6k
Transcript
有田朋樹・和田唯我 蜂を機械化するAgriswarmの開発
有田朋樹 慶應義塾大学 理工学研究科 修士1年 専門分野: 制御工学 和田唯我 慶應義塾大学 理工学研究科 博士1年
専門分野: 機械学習
None
福島県浜通り 大熊町 原発被災の中心地域である大熊町を 復興するため,かつて特産品だった キウイの栽培を始めた
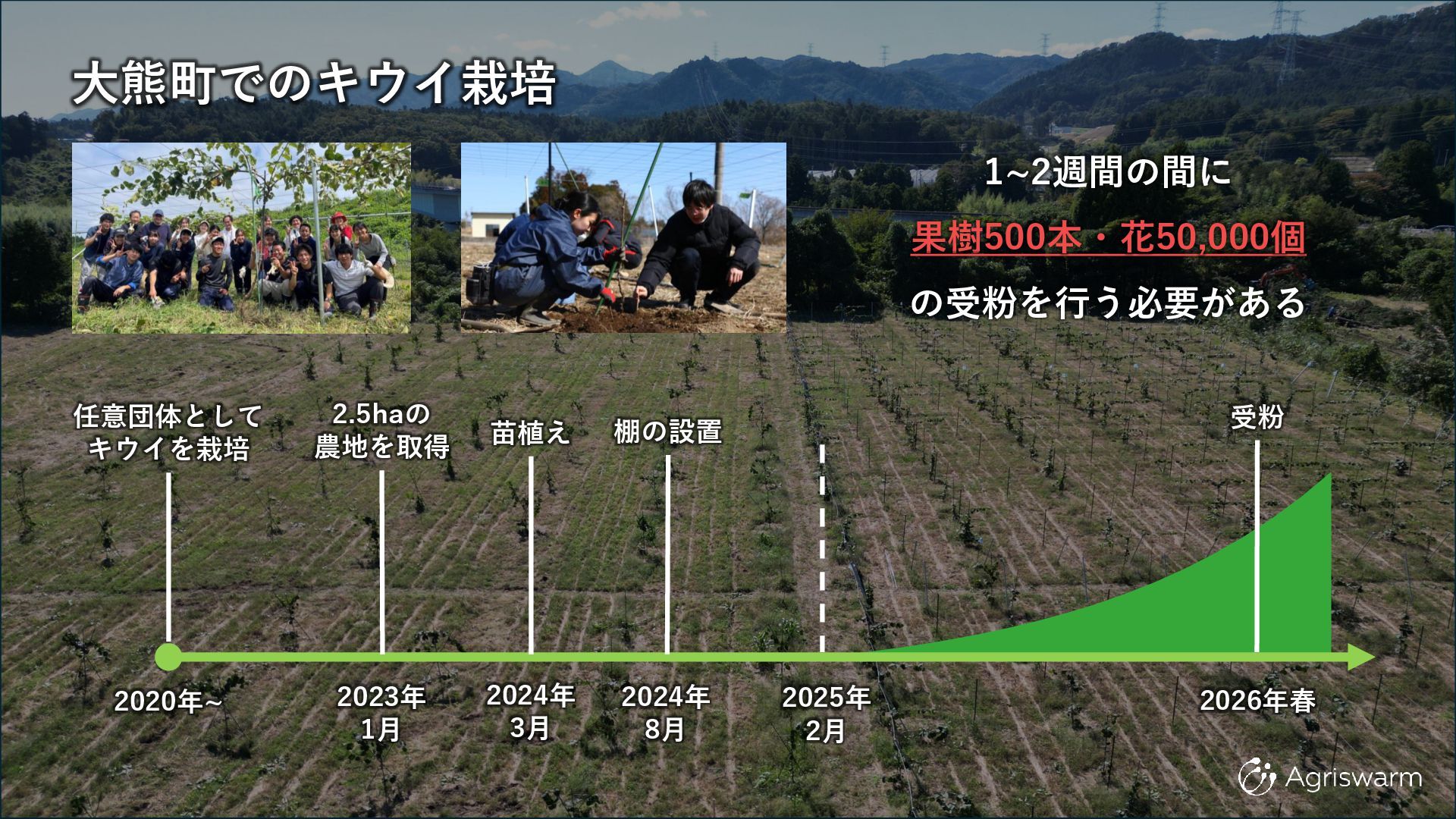
苗植え 任意団体として キウイを栽培 棚の設置 2025年 2月 2.5haの 農地を取得 2024年 8月
2024年 3月 2023年 1月 2020年~ 大熊町でのキウイ栽培 受粉 1~2週間の間に 果樹500本・花50,000個 の受粉を行う必要がある 2026年春
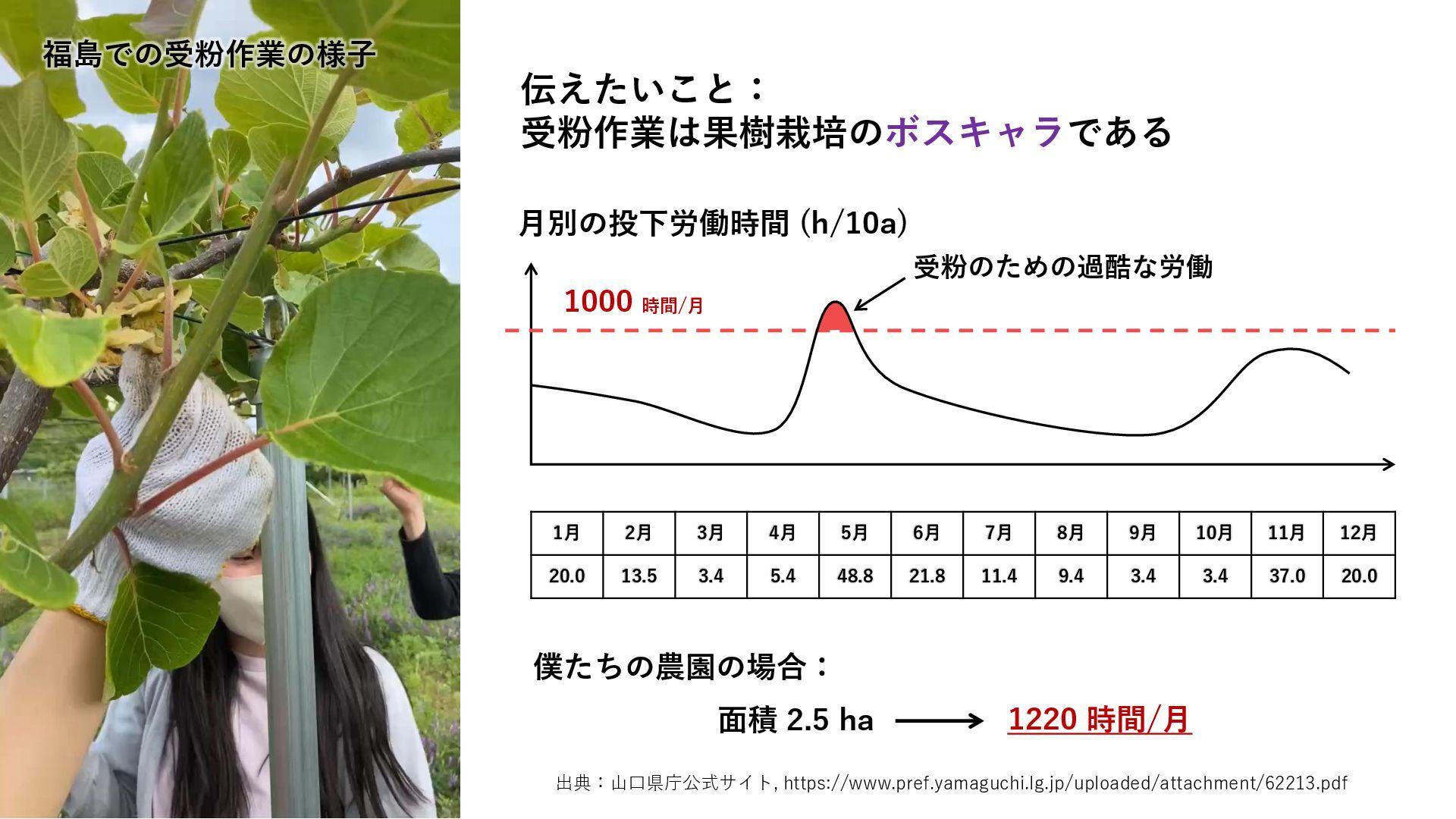
1月 2月 3月 4月 5月 6月 7月 8月 9月 10月
11月 12月 20.0 13.5 3.4 5.4 48.8 21.8 11.4 9.4 3.4 3.4 37.0 20.0 福島での受粉作業の様子 月別の投下労働時間 (h/10a) 受粉のための過酷な労働 1000 時間/月 伝えたいこと: 受粉作業は果樹栽培のボスキャラである 面積 2.5 ha 1220 時間/月 僕たちの農園の場合: 出典:山口県庁公式サイト, https://www.pref.yamaguchi.lg.jp/uploaded/attachment/62213.pdf
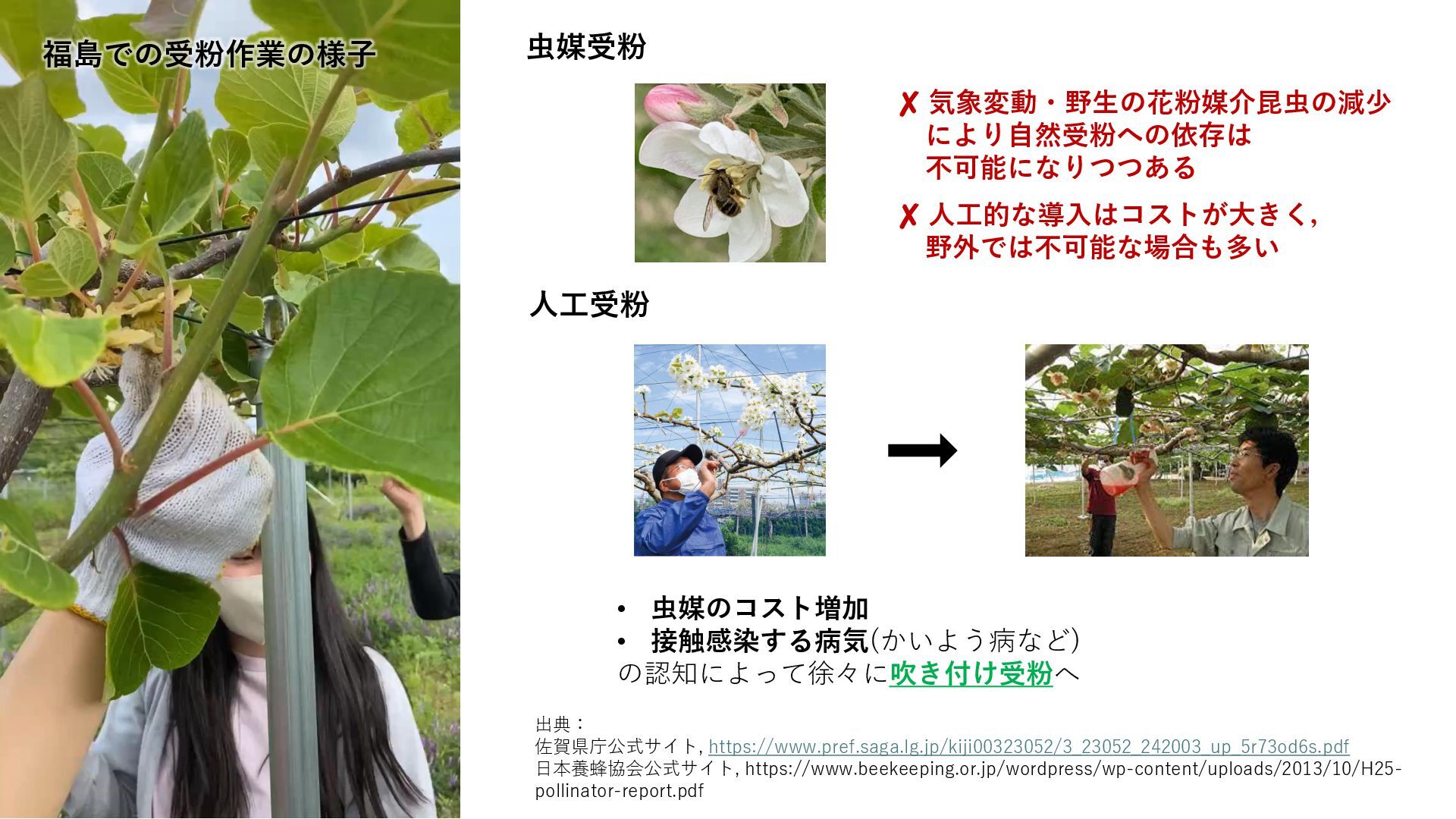
福島での受粉作業の様子 人工受粉 虫媒受粉 ✘ 気象変動・野生の花粉媒介昆虫の減少 により自然受粉への依存は 不可能になりつつある 出典: 佐賀県庁公式サイト, https://www.pref.saga.lg.jp/kiji00323052/3_23052_242003_up_5r73od6s.pdf
日本養蜂協会公式サイト, https://www.beekeeping.or.jp/wordpress/wp-content/uploads/2013/10/H25- pollinator-report.pdf ✘ 人工的な導入はコストが大きく, 野外では不可能な場合も多い • 虫媒のコスト増加 • 接触感染する病気(かいよう病など) の認知によって徐々に吹き付け受粉へ
苗は植えてしまった。受粉できなさそう。
蜂の代わりにドローンで良いのでは…?
15
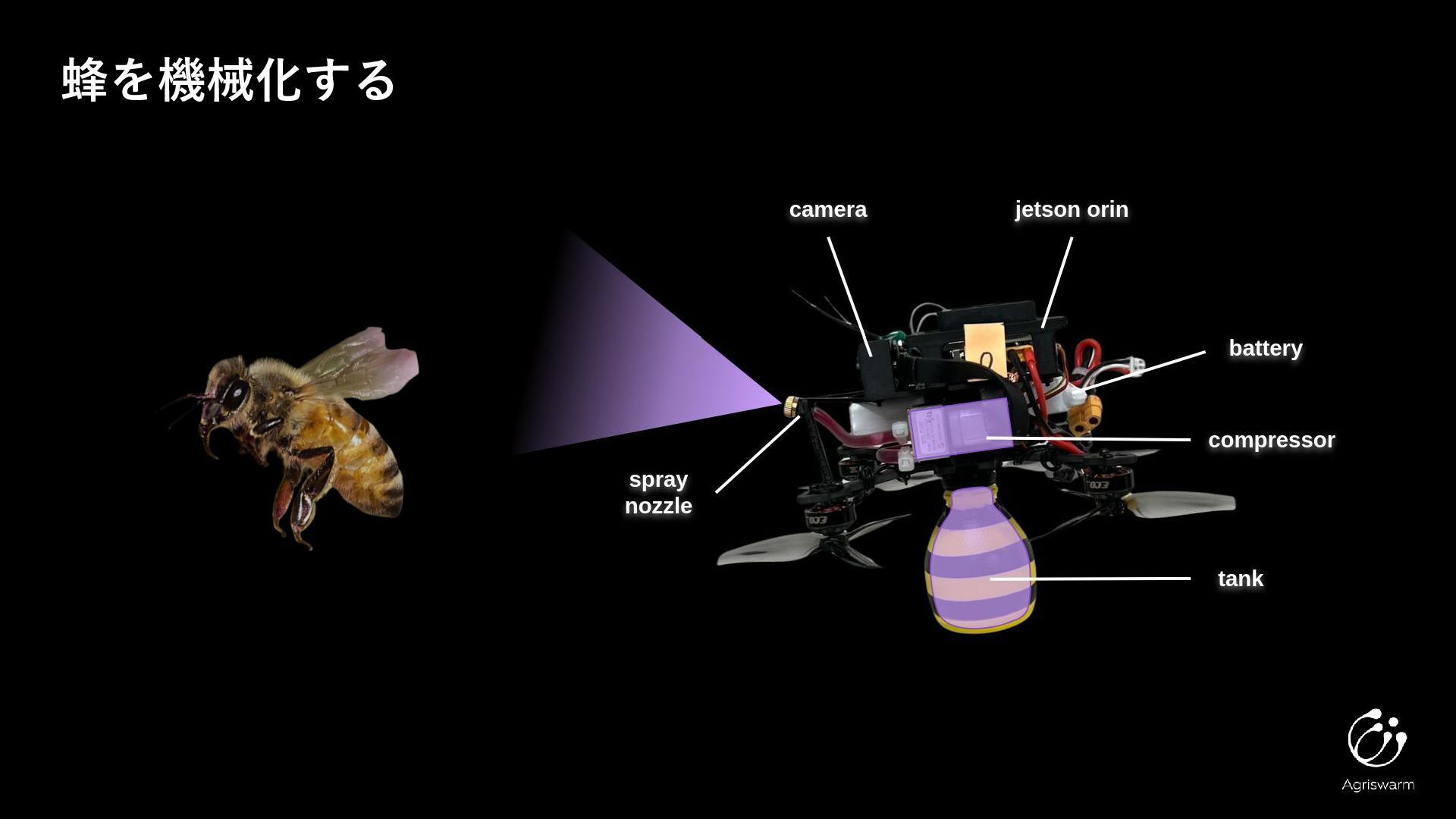
蜂を機械化する
自動走行型 アームロボット 大型散布ドローン 積載効率 不整地における 機動性 狭路(果樹棚下など) における機動性 Excellent ◎
Very Poor △ Poor △ Poor 室内受粉ドローン (日本工業大学, 2023) Excellent ◎ 栽培支援ロボットの比較 自動走行型 アームロボット 大型散布ドローン 積載効率 不整地における 機動性 狭路(果樹棚下など) における機動性 ◎ Excellent ✗ Very Poor △ Poor △ Poor 室内受粉ドローン (日本工業大学, 2023) Excellent ◎ ◎ Excellent ✗ Very Poor 〇 Good 〇 Good ✗ Very Poor △ Poor △ Poor
自動走行型 アームロボット 大型散布ドローン 積載効率 不整地における 機動性 狭路(果樹棚下など) における機動性 Excellent ◎
Very Poor △ Poor △ Poor 室内受粉ドローン (日本工業大学, 2023) Excellent ◎ 栽培支援ロボットの比較 自動走行型 アームロボット 大型散布ドローン 積載効率 不整地における 機動性 狭路(果樹棚下など) における機動性 ◎ Excellent ✗ Very Poor △ Poor △ Poor 室内受粉ドローン (日本工業大学, 2023) Excellent ◎ ◎ Excellent ✗ Very Poor 〇 Good 〇 Good ✗ Very Poor △ Poor △ Poor https://scienceportal.jst.go.jp/gateway/clip/20230728_g01/
Fair ◎ Excellent 自動走行型 アームロボット 大型散布ドローン 積載効率 不整地における 機動性 狭路(果樹棚下など)
における機動性 Excellent ◎ Very Poor △ Poor △ Poor 室内受粉ドローン (日本工業大学, 2023) 栽培支援ロボットの比較 自動走行型 アームロボット 大型散布ドローン 積載効率 不整地における 機動性 狭路(果樹棚下など) における機動性 ◎ Excellent ✗ Very Poor △ Poor △ Poor 室内受粉ドローン (日本工業大学, 2023) ✗ Very Poor 〇 Good 〇 Good ✗ Very Poor △ Poor △ Poor Fair ◎ Excellent ◎ Excellent
技術的課題: 棚下&狭路&自然環境
None
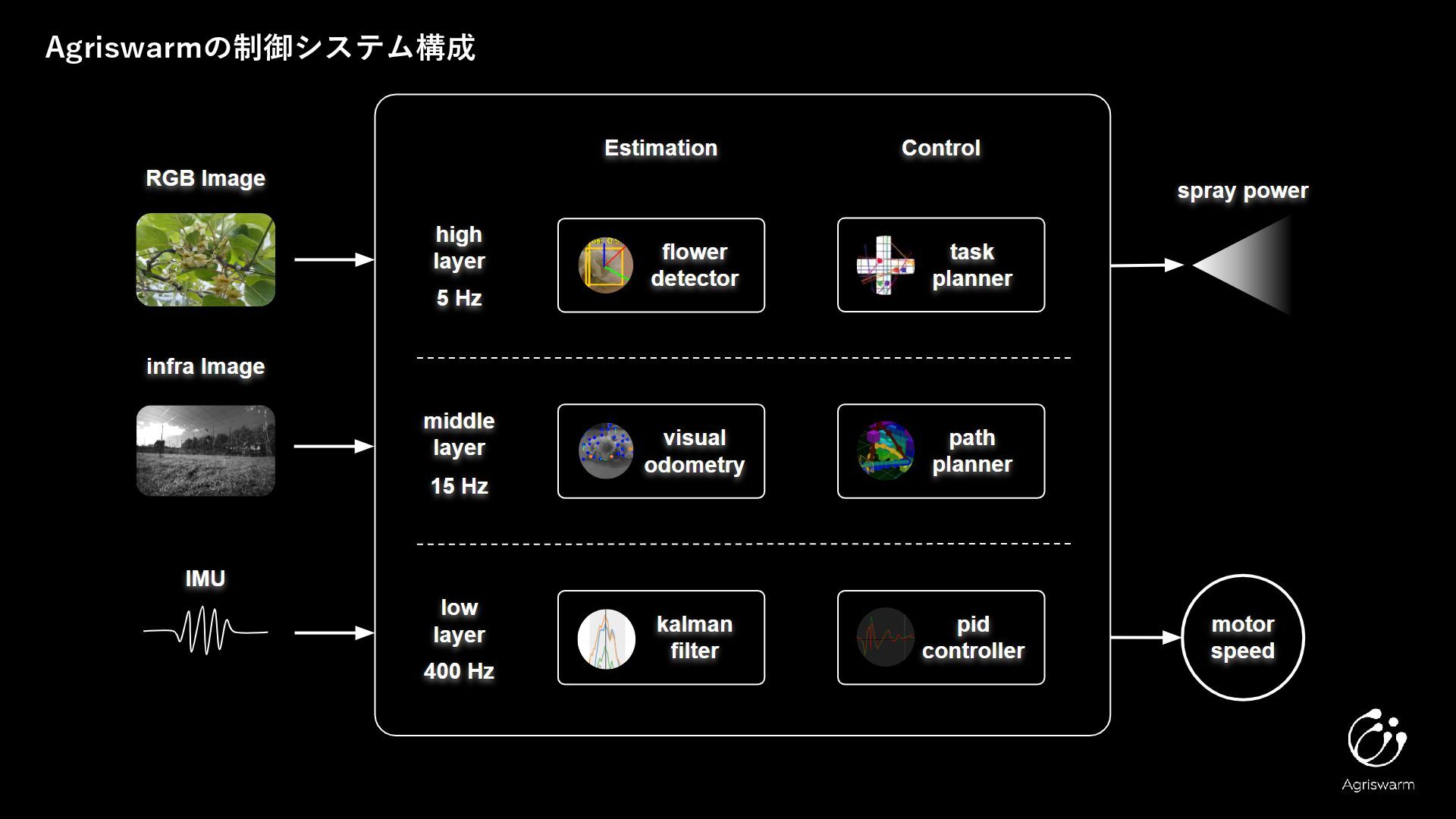
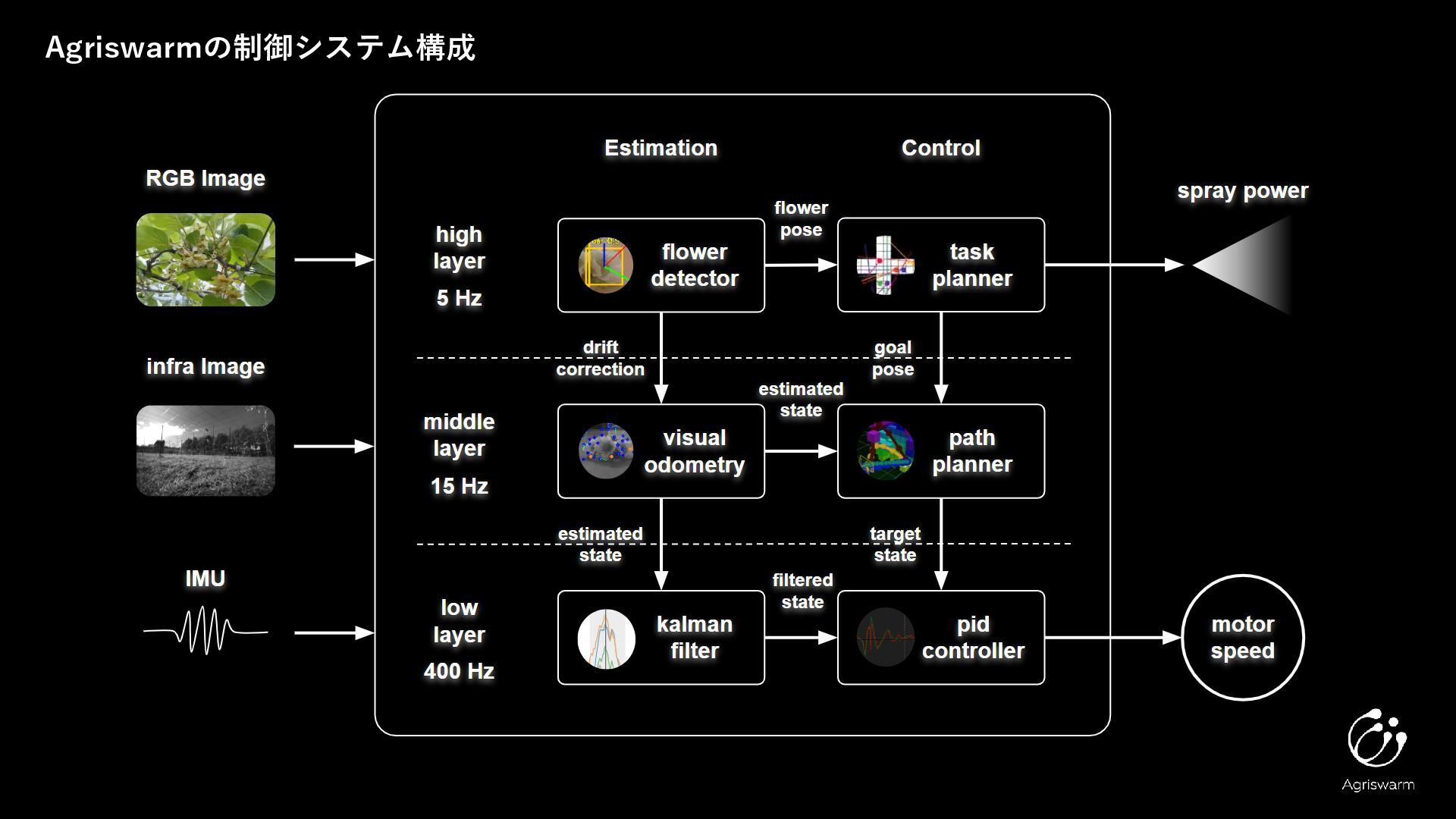
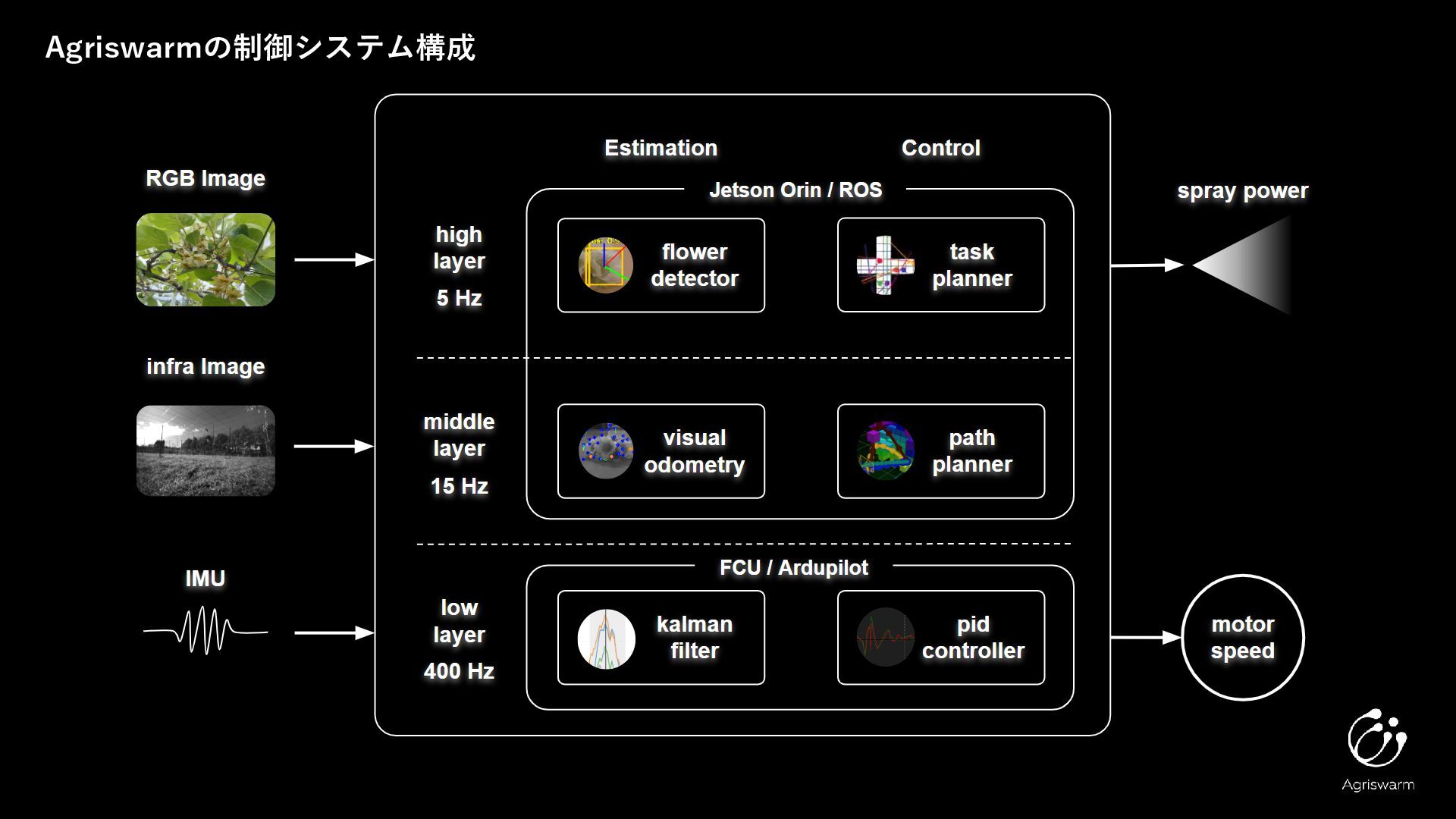
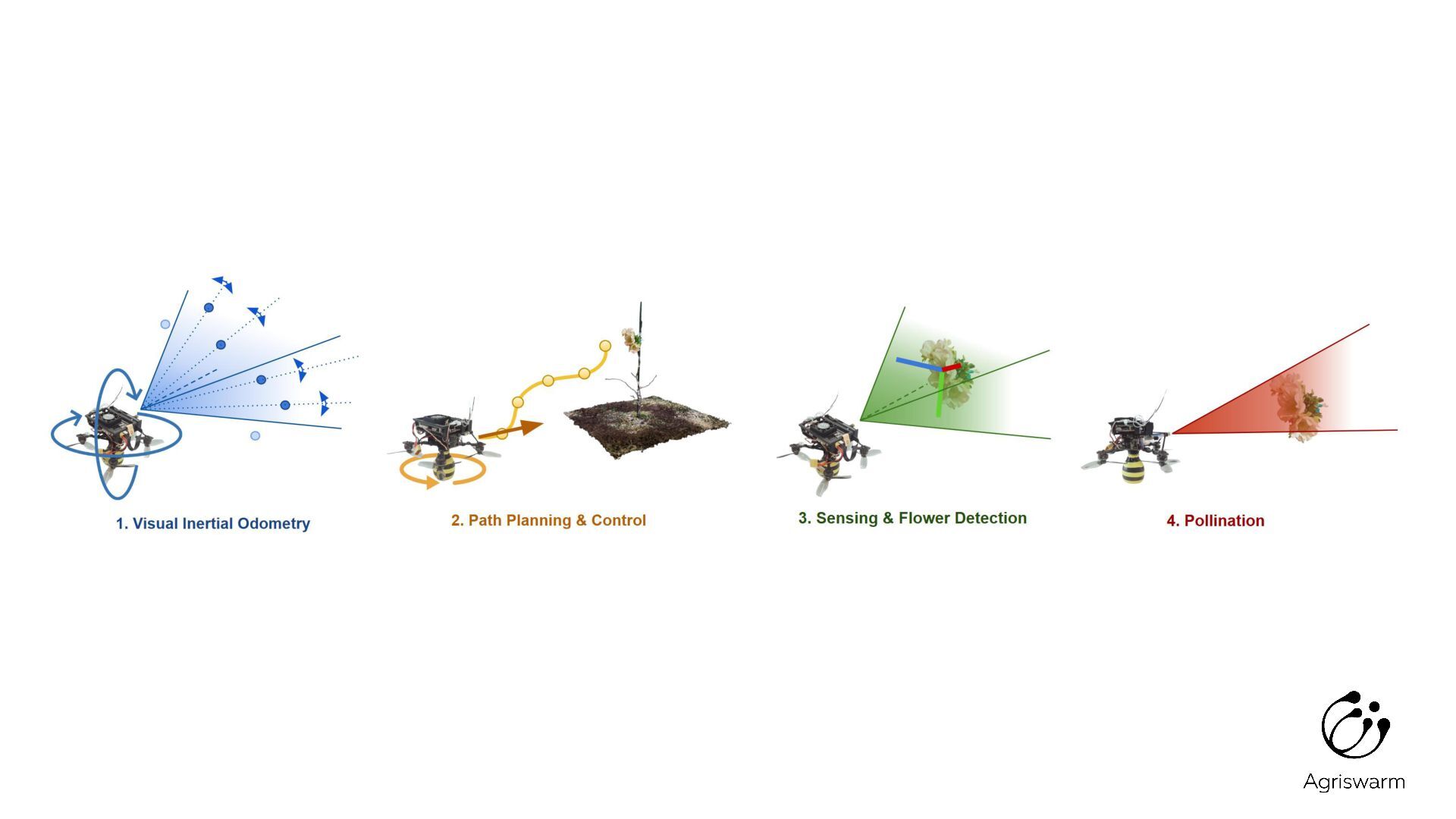
Agriswarmの制御システム構成
Agriswarmの制御システム構成
Agriswarmの制御システム構成
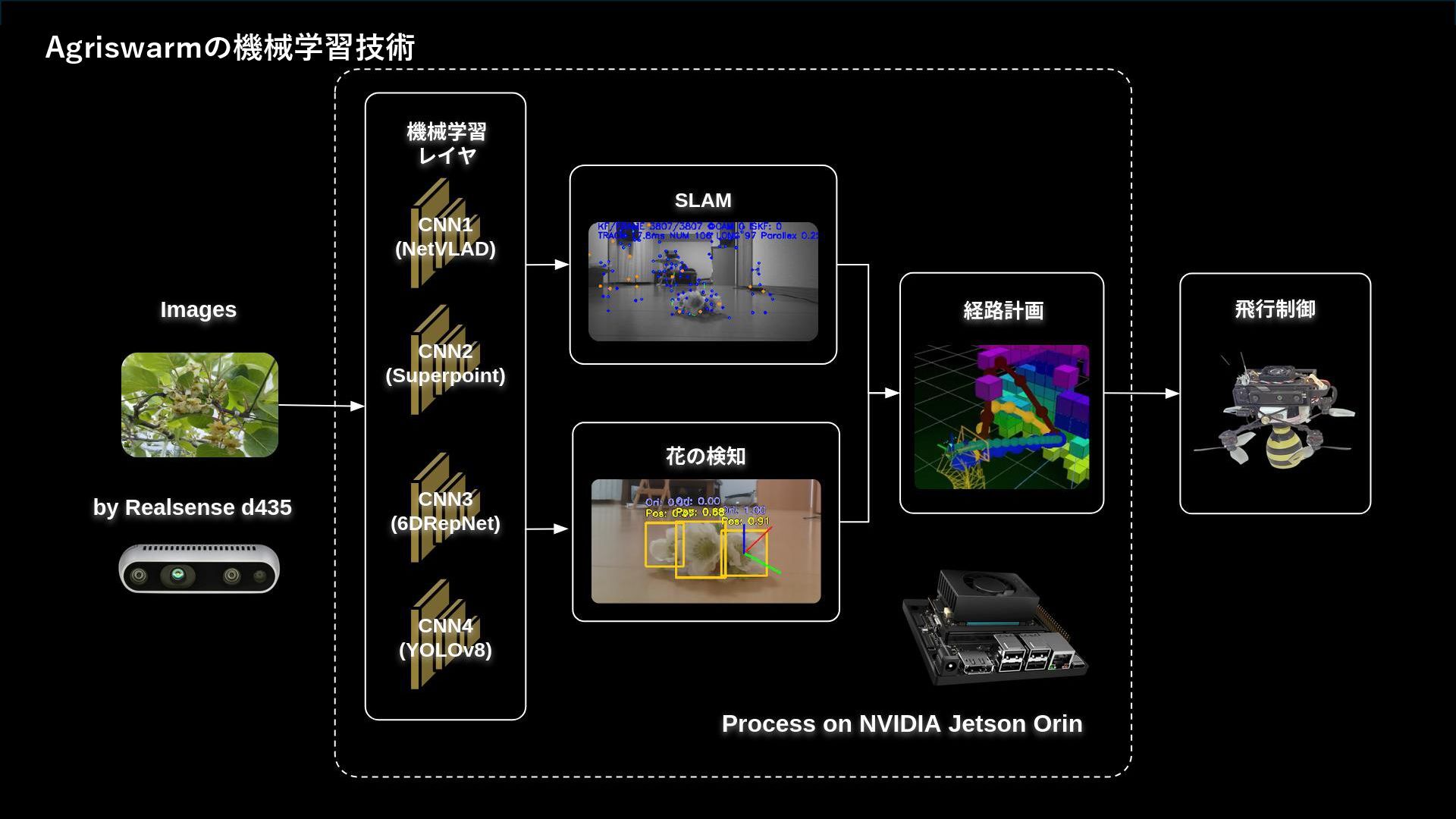
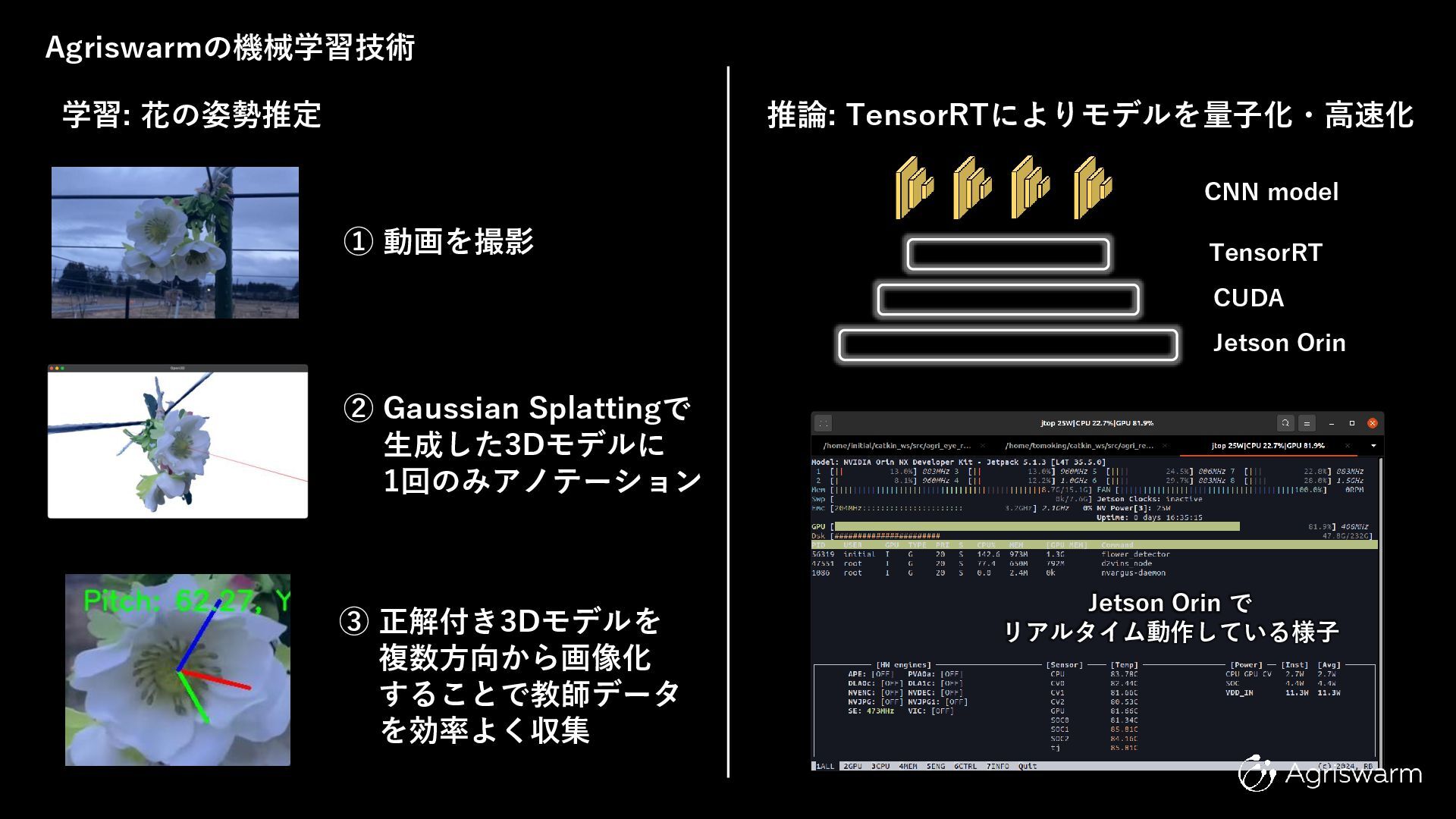
Agriswarmの機械学習技術
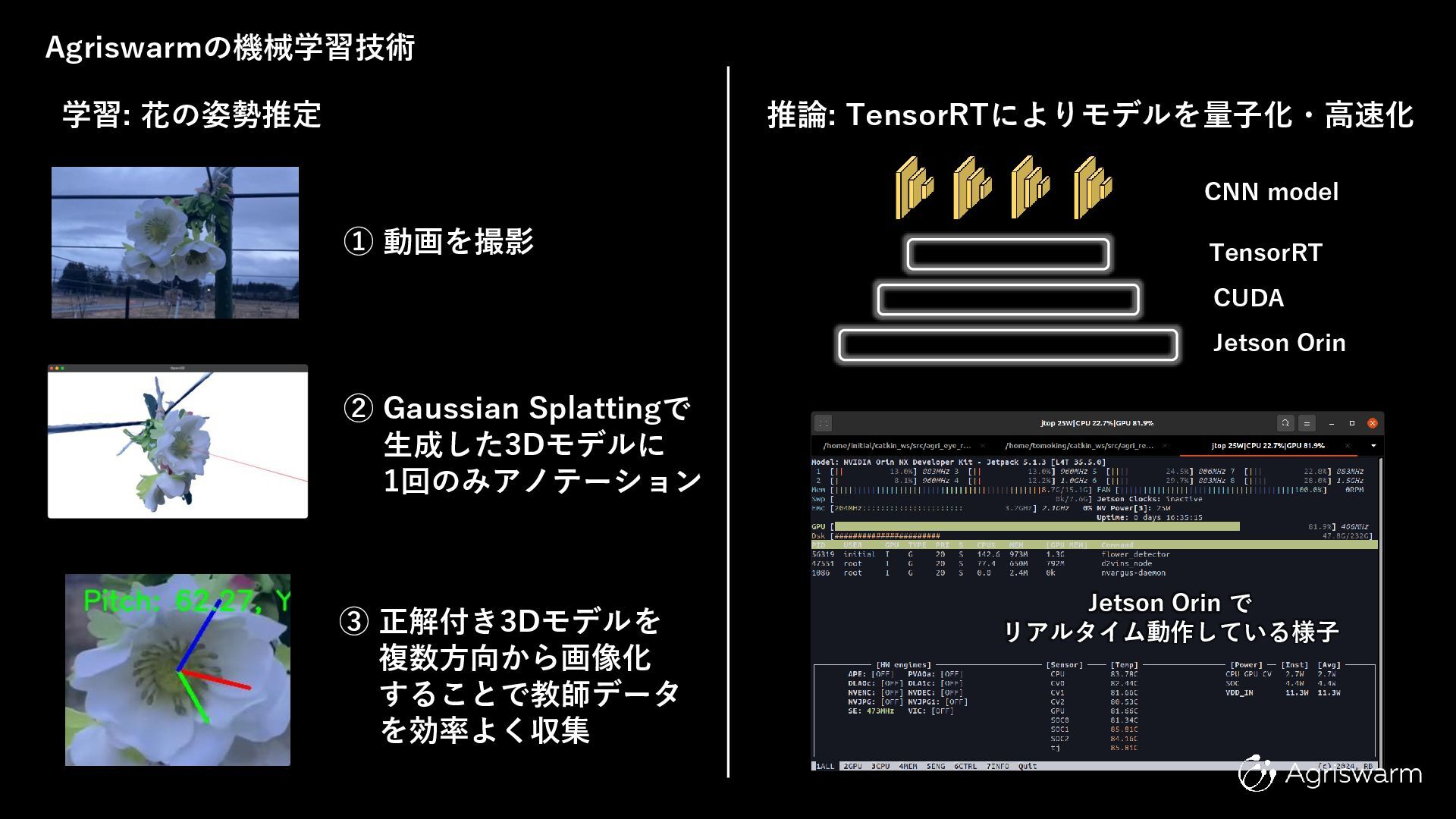
Agriswarmの機械学習技術 学習: 花の姿勢推定 推論: TensorRTによりモデルを量子化・高速化 ① 動画を撮影 ② Gaussian Splattingで
生成した3Dモデルに 1回のみアノテーション ③ 正解付き3Dモデルを 複数方向から画像化 することで教師データ を効率よく収集 Jetson Orin CUDA TensorRT CNN model Jetson Orin で リアルタイム動作している様子
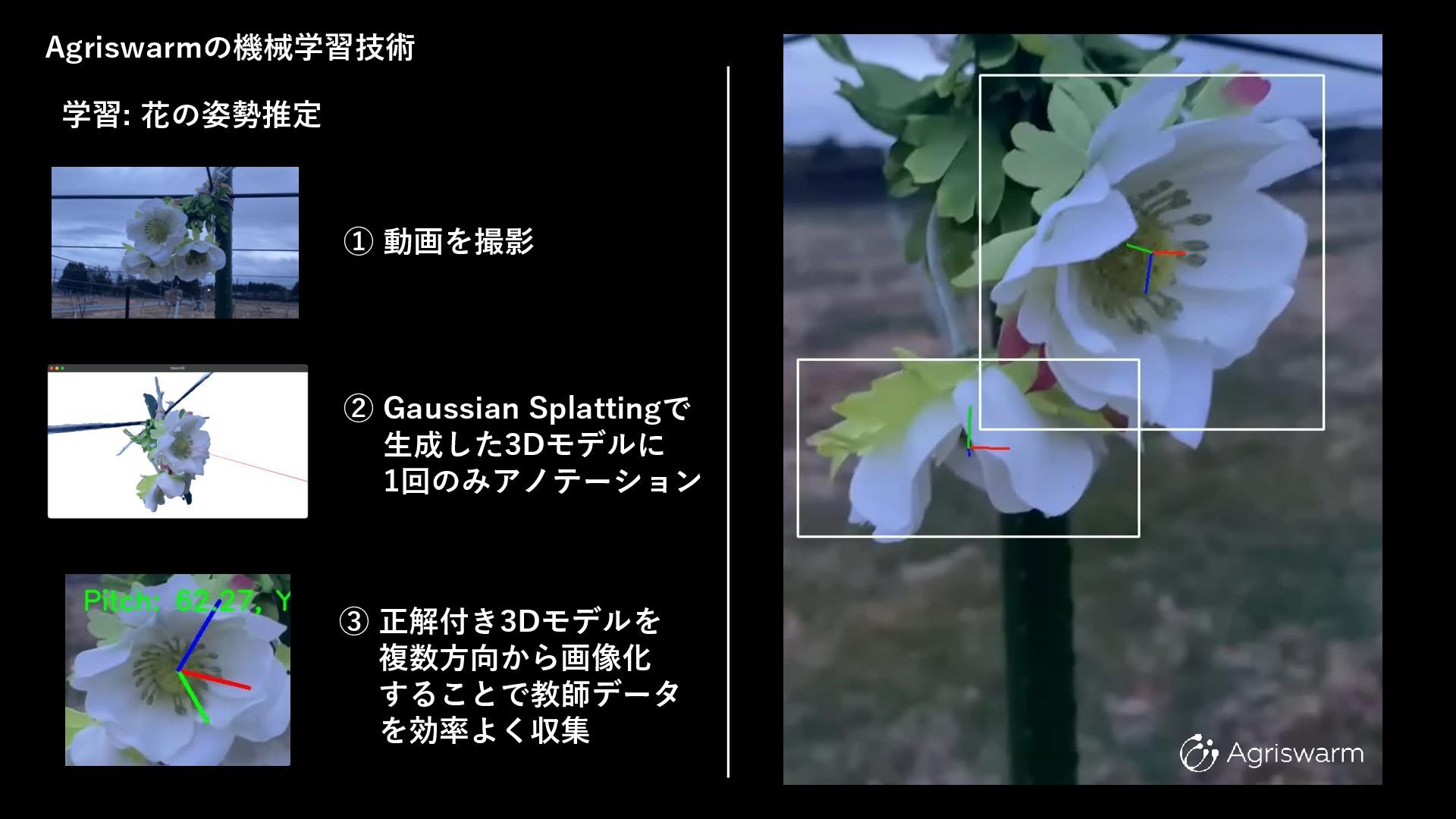
Agriswarmの機械学習技術 学習: 花の姿勢推定 ① 動画を撮影 ② Gaussian Splattingで 生成した3Dモデルに 1回のみアノテーション
③ 正解付き3Dモデルを 複数方向から画像化 することで教師データ を効率よく収集
Agriswarmの機械学習技術 学習: 花の姿勢推定 ① 動画を撮影 ② Gaussian Splattingで 生成した3Dモデルに 1回のみアノテーション
③ 正解付き3Dモデルを 複数方向から画像化 することで教師データ を効率よく収集
Agriswarmの機械学習技術 学習: 花の姿勢推定 ① 動画を撮影 ② Gaussian Splattingで 生成した3Dモデルに 1回のみアノテーション
③ 正解付き3Dモデルを 複数方向から画像化 することで教師データ を効率よく収集 Jetson Orin CUDA TensorRT CNN model Jetson Orin で リアルタイム動作している様子 推論: TensorRTによりモデルを量子化・高速化
None
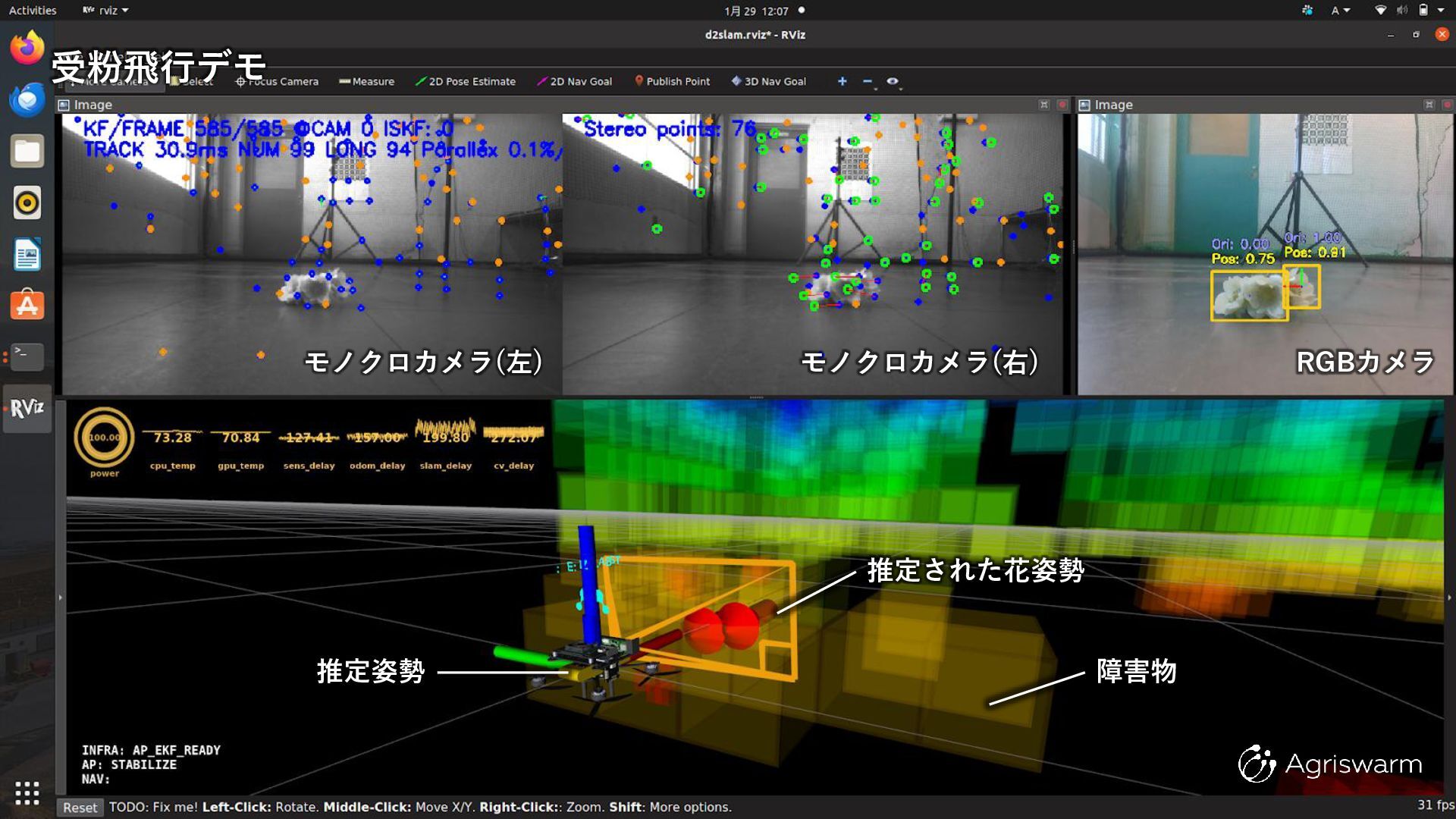
モノクロカメラ(左) モノクロカメラ(右) RGBカメラ 推定された花姿勢 推定姿勢 障害物 受粉飛行デモ
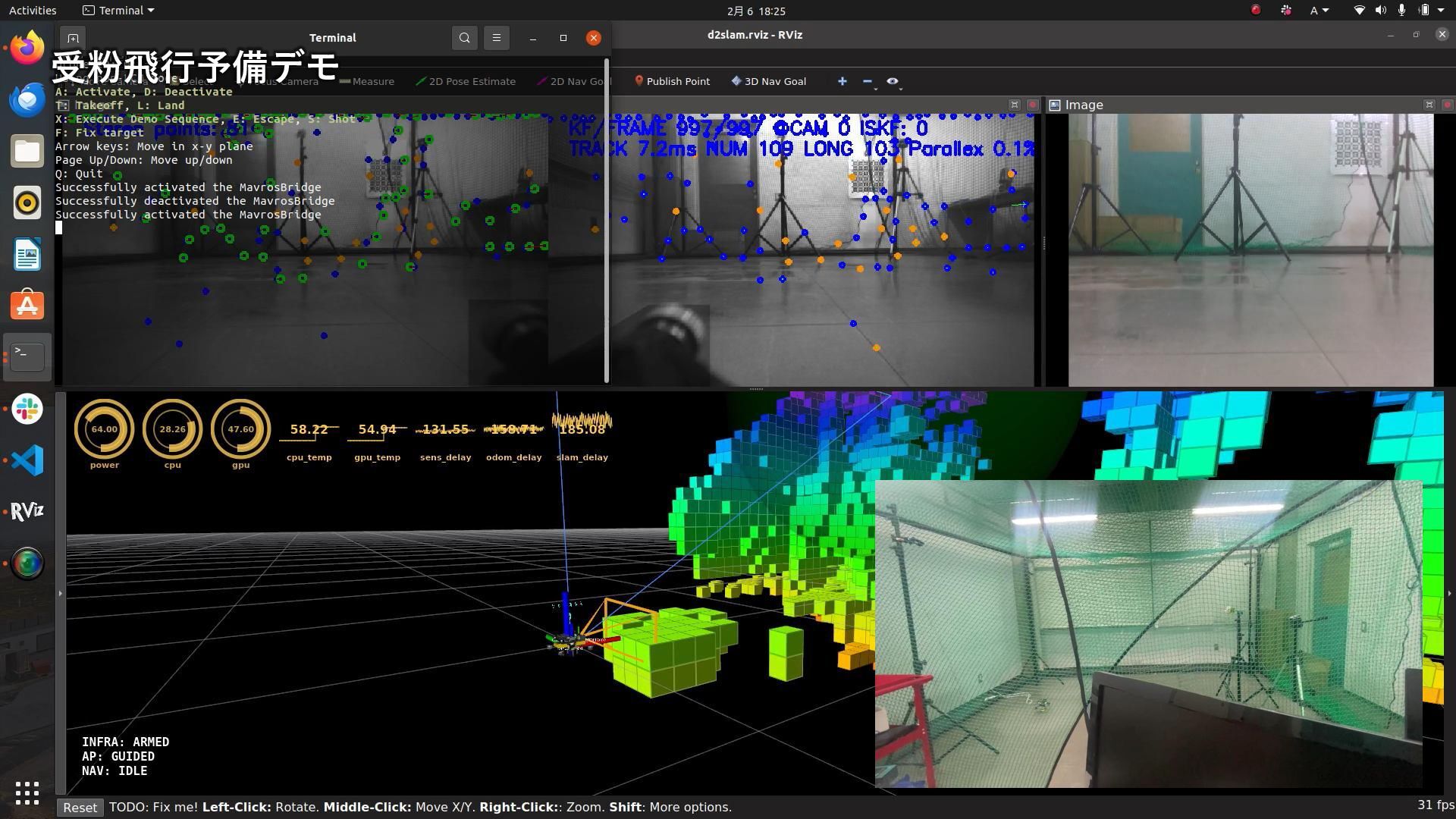
受粉飛行予備デモ
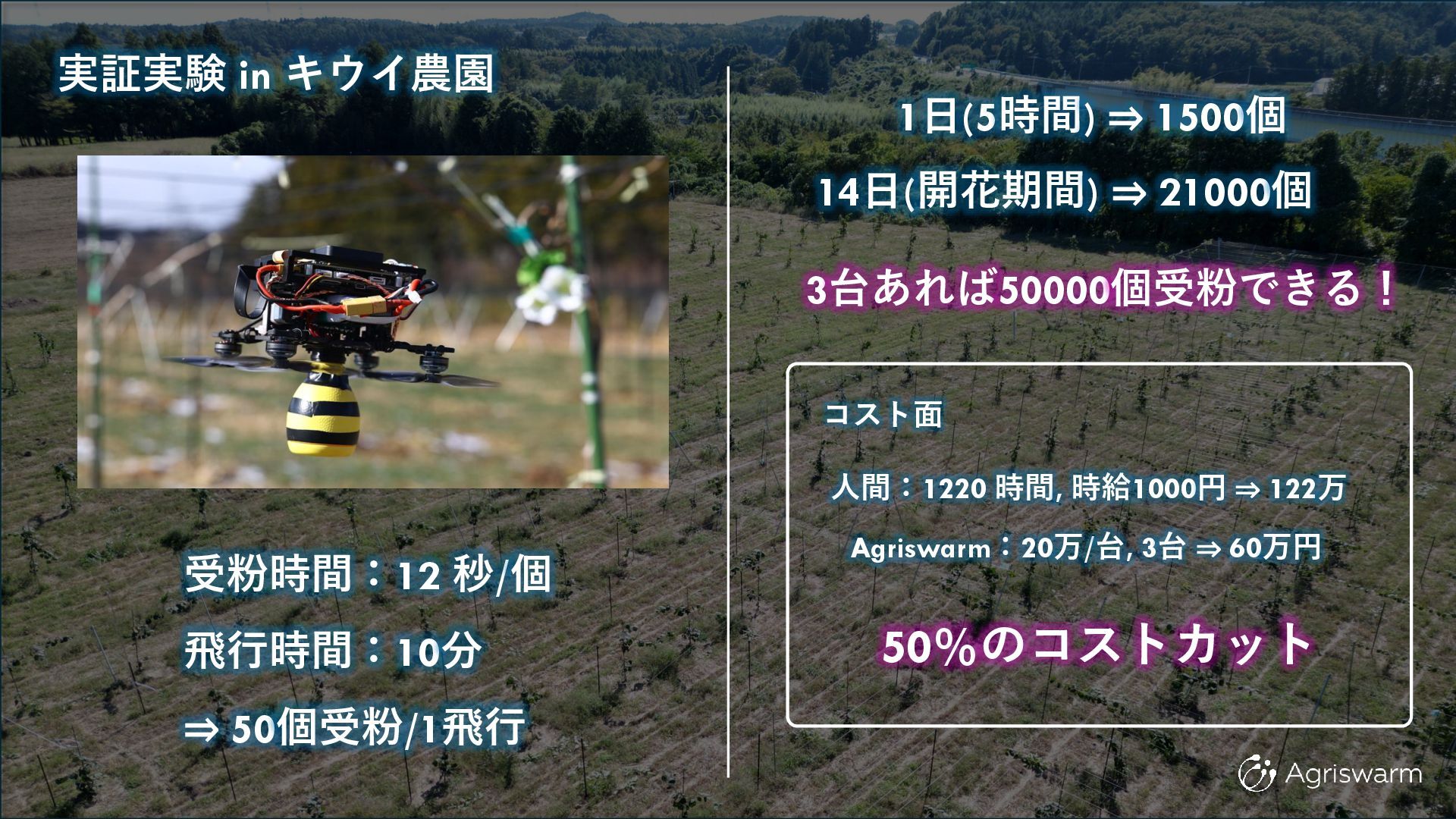
実証実験 in キウイ農園 3台あれば50000個受粉できる! 1日(5時間) ⇒ 1500個 受粉時間:12 秒/個 飛行時間:10分
⇒ 50個受粉/1飛行 14日(開花期間) ⇒ 21000個 コスト面 人間:1220 時間, 時給1000円 ⇒ 122万 Agriswarm:20万/台, 3台 ⇒ 60万円 50%のコストカット
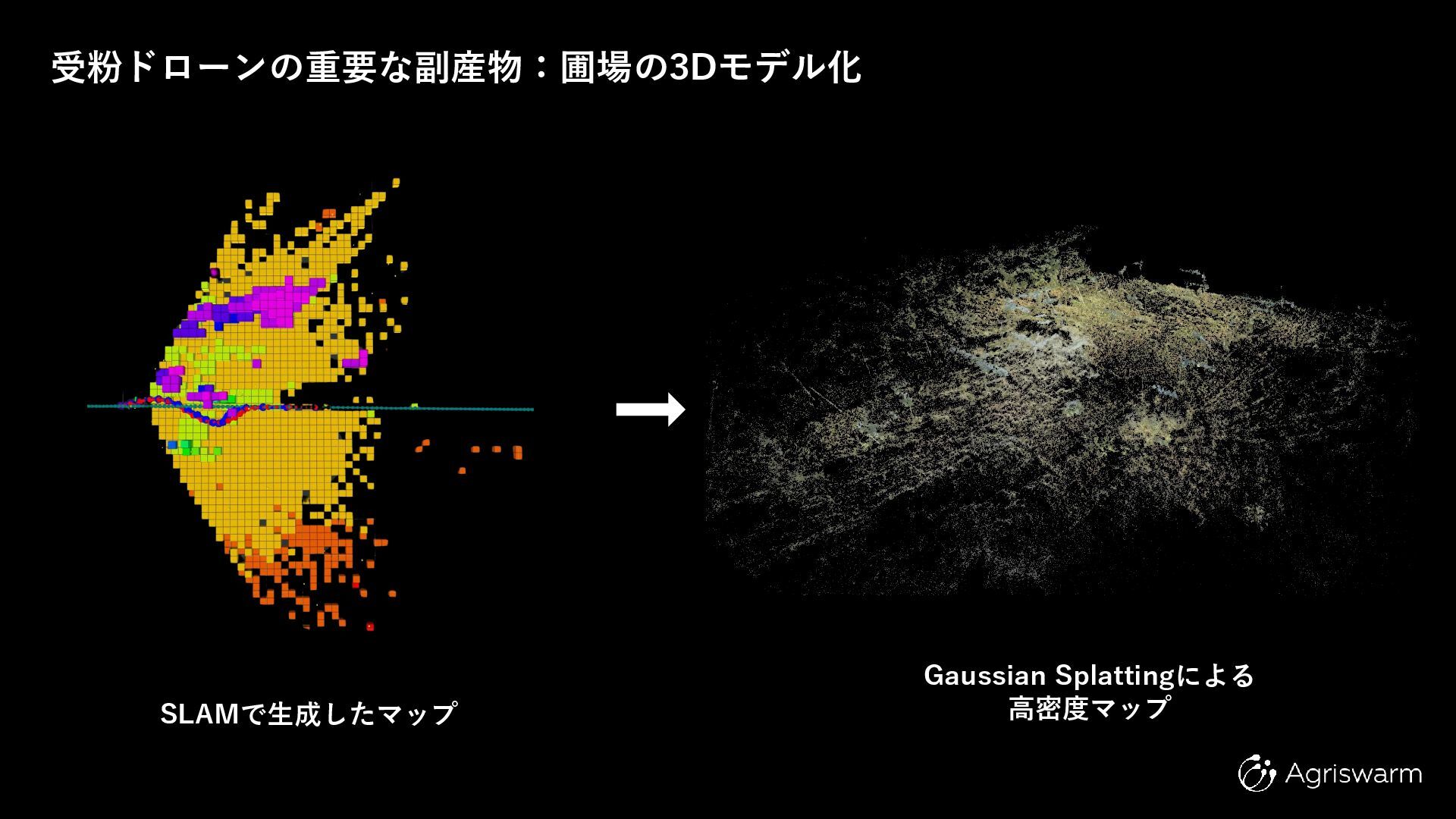
受粉ドローンの重要な副産物:圃場の3Dモデル化 SLAMで生成したマップ Gaussian Splattingによる 高密度マップ
None
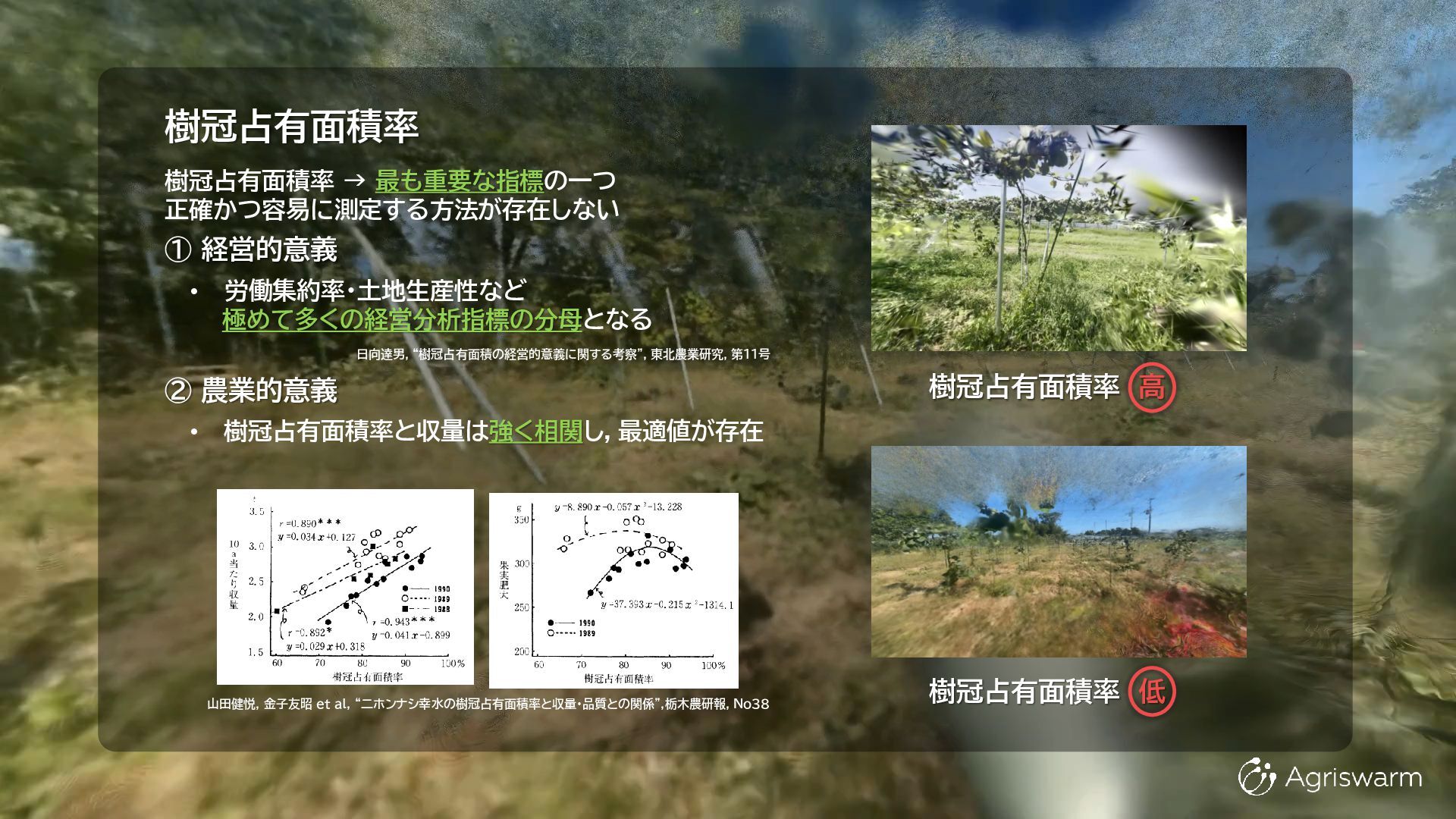
樹冠占有面積率 → 最も重要な指標の一つ 正確かつ容易に測定する方法が存在しない ① 経営的意義 • 労働集約率・土地生産性など 極めて多くの経営分析指標の分母となる ②
農業的意義 • 樹冠占有面積率と収量は強く相関し,最適値が存在 山田健悦, 金子友昭 et al, “二ホンナシ幸水の樹冠占有面積率と収量・品質との関係”,栃木農研報, No38 日向達男, “樹冠占有面積の経営的意義に関する考察”, 東北農業研究, 第11号 樹冠占有面積率 樹冠占有面積率 高 樹冠占有面積率 低
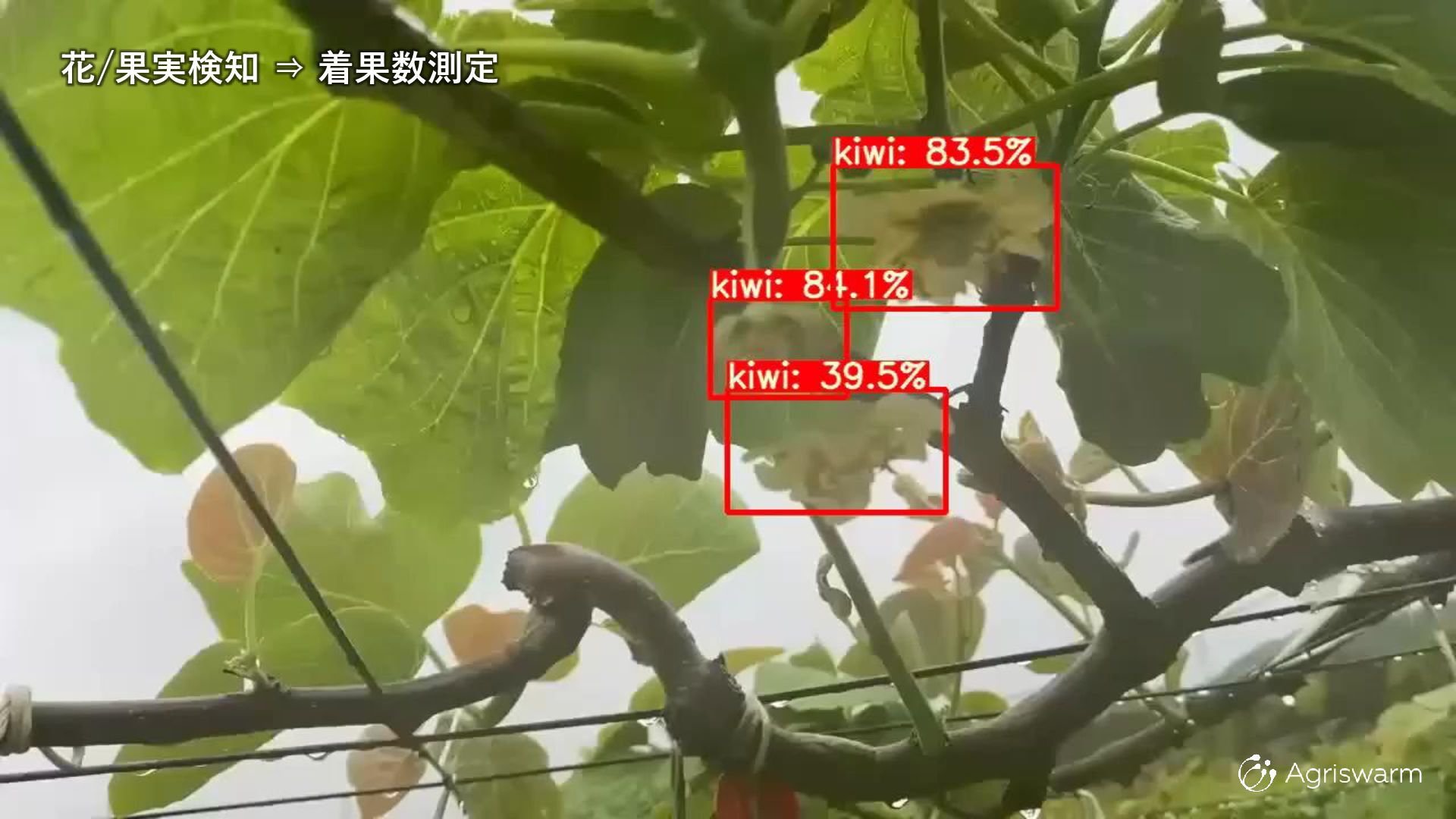
花/果実検知 ⇒ 着果数測定
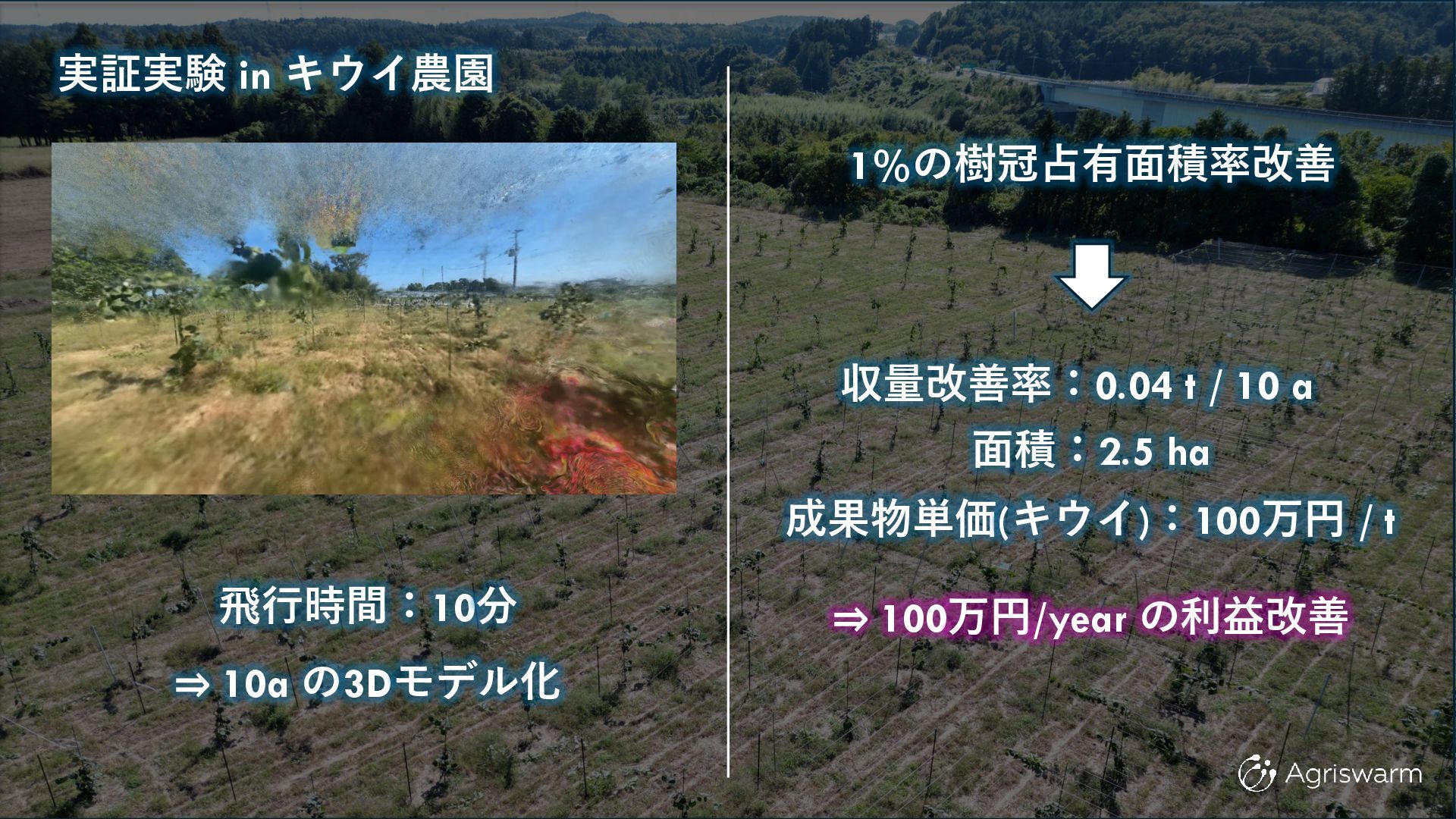
実証実験 in キウイ農園 1%の樹冠占有面積率改善 飛行時間:10分 ⇒ 10a の3Dモデル化 収量改善率:0.04 t
/ 10 a 面積:2.5 ha 成果物単価(キウイ):100万円 / t ⇒ 100万円/year の利益改善
これからの課題 ① 自動充電システムを作る ② 複数機の協調制御を実現する ③ 春の受粉で実証実験を行う!
僕たちの目指す未来 壁直面 in 現場 技術で解決 in 現場 福島で課題と接続されて生きていく 興味を持っていただけた方はTwitterアカウントにご連絡ください @allegory_write
@YuigaWada
謝辞 (五十音順) 農業面・技術面について多くのアドバイスを頂いた 株式会社 harvest X 市川様, 大阪大学 大倉准教授, 株式会社
Orchard&Technology 末澤様, 株式会社 Phytometrics 戸田様 ビジネス面でアドバイスを頂いた KLL(慶應義塾先端科学技術研究センター)関係者の皆様 実験環境や開発に多大なサポートを頂いた慶應義塾大学滑川研究室の皆様 プロジェクト立ち上げ時にご協力頂いた慶應義塾大学杉浦研究室, 株式会社Tokyo Roboticsの皆様 全てを手伝ってくれた株式会社ReFruits, 大熊キウイ再生クラブの仲間達 深く御礼申し上げます
福島県浜通り 大熊町 キウイ農園 福島で課題と接続されて生きていく
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}