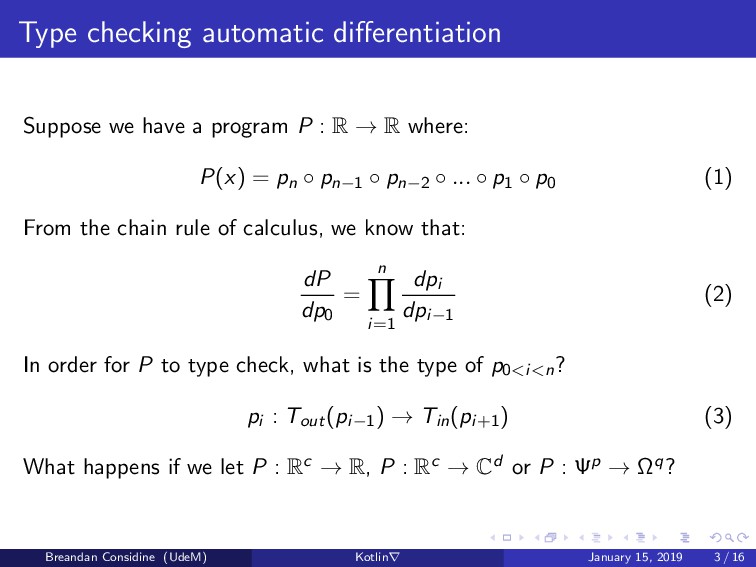
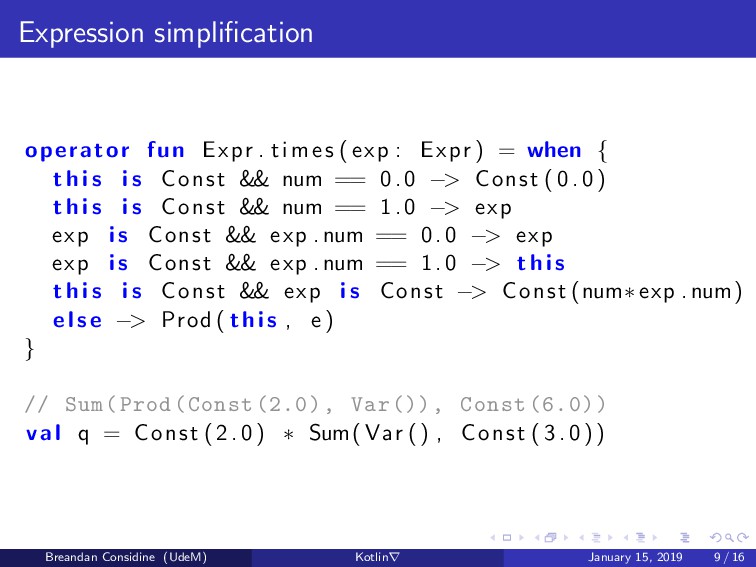
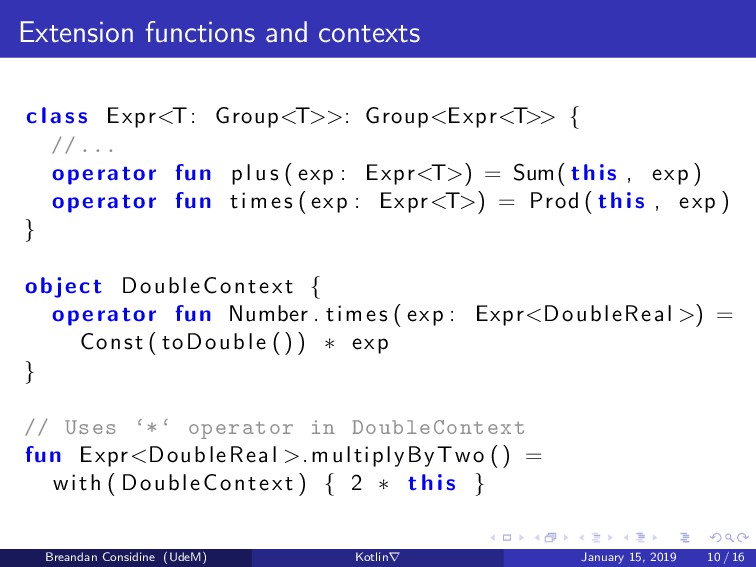
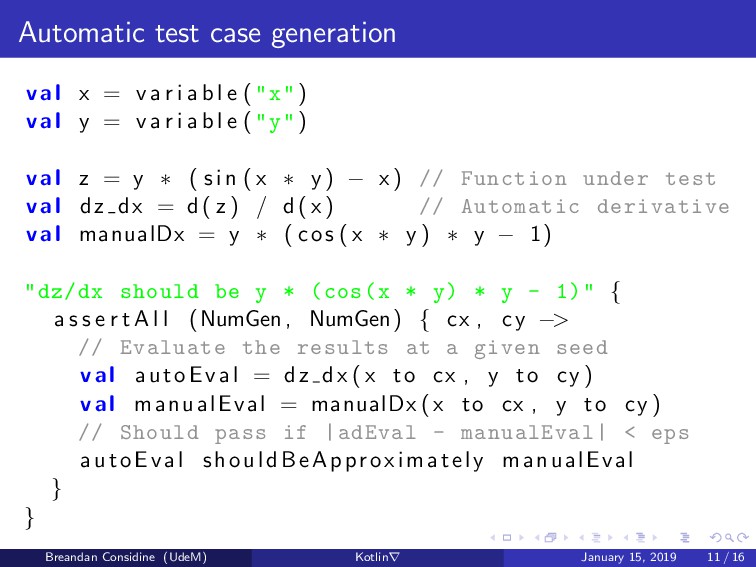
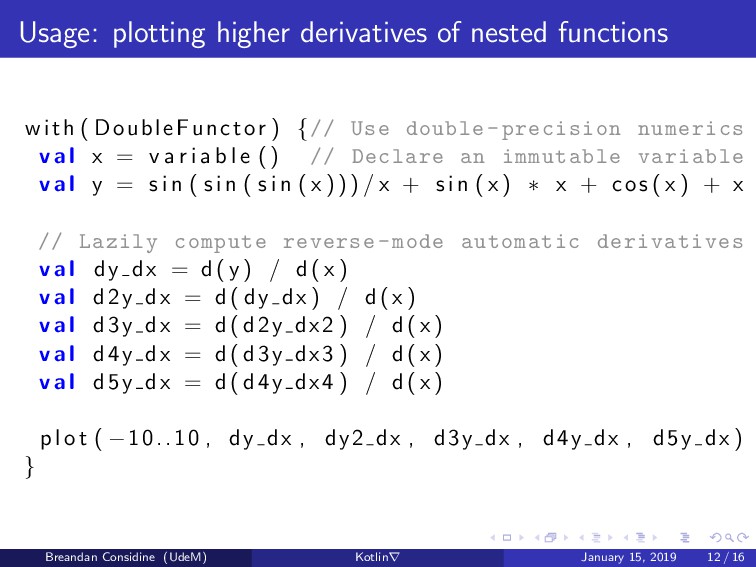
Kotlin is a multi-platform programming language with compiler support for JVM, JS and native targets. The language emphasizes static typing, null-safety and interoperability with Java and JavaScript. In this work, we present an algebraically grounded implementation of forward and reverse mode automatic differentiation written in pure Kotlin and a property-based test suite for soundness checking. Our approach enables users to target multiple platforms through a single codebase and receive compile-time static analysis. A working prototype is provided at: https://github.com/breandan/kotlingrad
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}