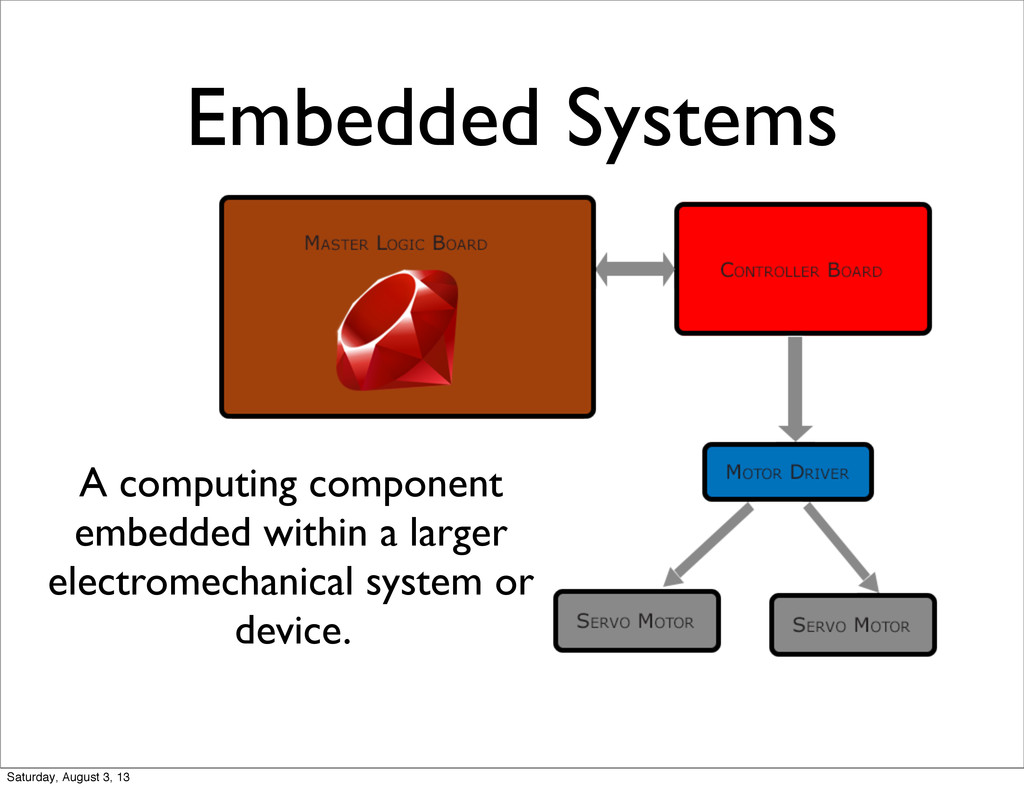
Many Rubyists know Ruby for its ease of use as a web scripting language. Many sysadmins know Ruby for its server provisioning capacity and as a glue language to the shell. Many Rubyists don't know about how Ruby can be used in the world of embedded computing and microcontrollers to assist your daily life. Mruby expands the capabilities to robotics and hobby electronics, as well as small-scale automation. Learn about ways to embed ruby into your daily life with heat control, plant watering, helpful robots, and more.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}