requirements: • See ship movements • Counts • And many more • Government requirements on reports • For example Co2 emissions • More future proof/Adaptable
position events per second •Mixed Radar/AIS data •GPS Jitter •For nines uptime (99,99%) •Provided by two mirrored servers •Existing system •Store for a minimum of 5 years •Enrich data with details from other system •Preference for real time
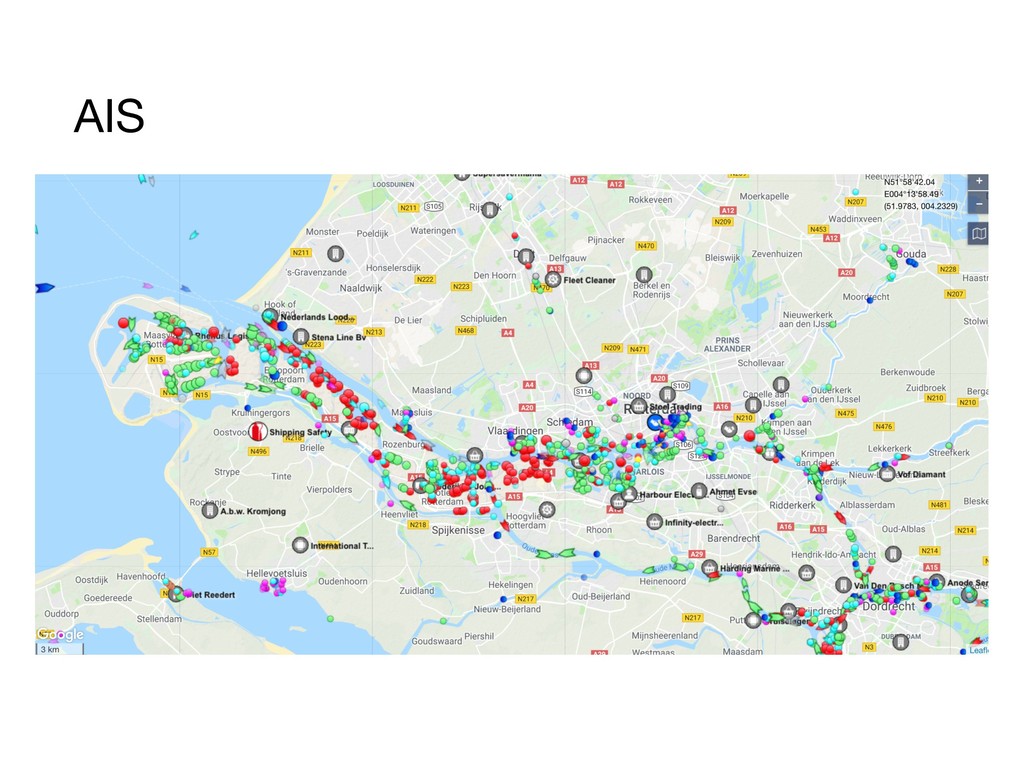
system that uses transponders on ships and is used by vessel traffic services (VTS). When satellites are used to detect AIS signatures, the term Satellite-AIS (S-AIS) is used. AIS information supplements marine radar, which continues to be the primary method of collision avoidance for water transport. wikipedia
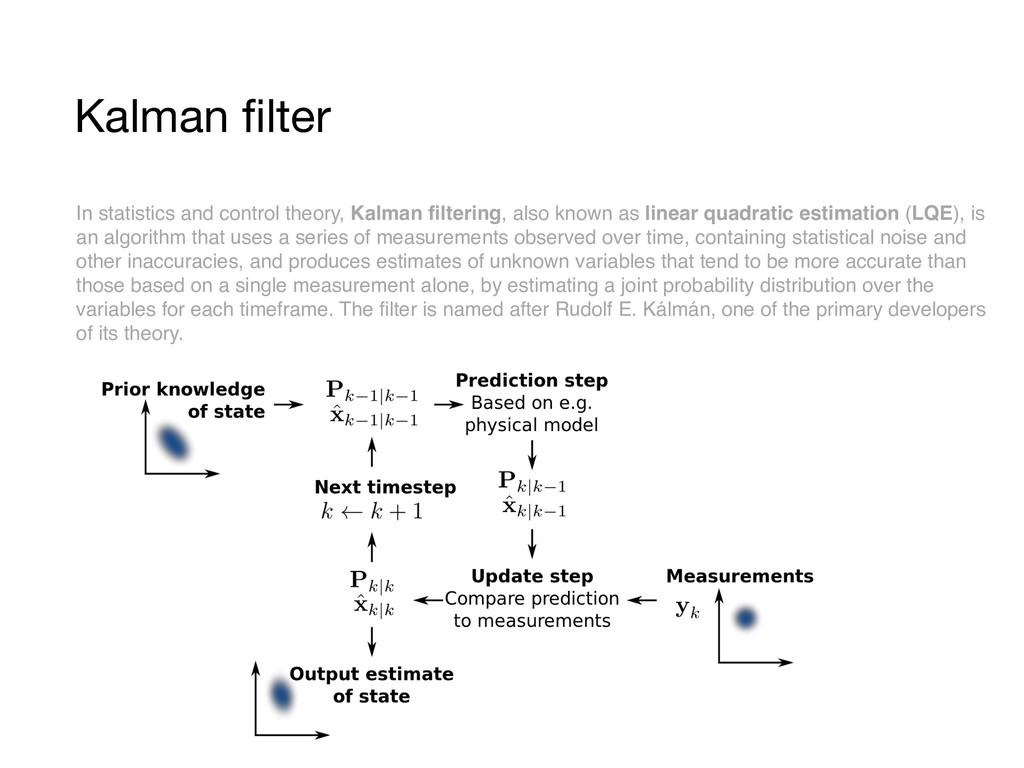
known as linear quadratic estimation (LQE), is an algorithm that uses a series of measurements observed over time, containing statistical noise and other inaccuracies, and produces estimates of unknown variables that tend to be more accurate than those based on a single measurement alone, by estimating a joint probability distribution over the variables for each timeframe. The filter is named after Rudolf E. Kálmán, one of the primary developers of its theory.
1 second • Tracks, delay estimated average 10-20 seconds • Aggregations max 10 minutes • Emissions max. 10 mins In contrast the current system runs on a weekly basis
events per second •Mixed Radar/AIS data • GPS Jitter • Four nines uptime (99,99%) • Provided by two mirrored servers • Existing system • Enrich data with details from other system • Preference for real time • Provide common API
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}