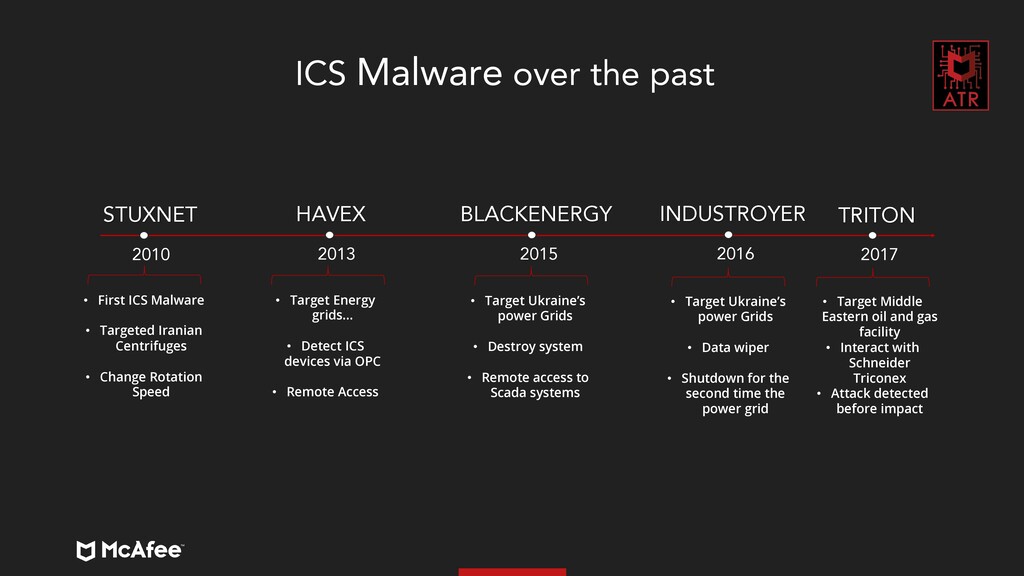
Industrial Control Systems are at the heart of our factories; they are essentially a way of interacting between the digital and physical worlds, crossing the border between data and physical actions. For a decade, industrial threats have continued to be more violent and more impactful. Accessing an ICS device is not always an affordable solution but many researchers, students and cybersecurity professionals need this type of knowledge to understand the ICS threat.
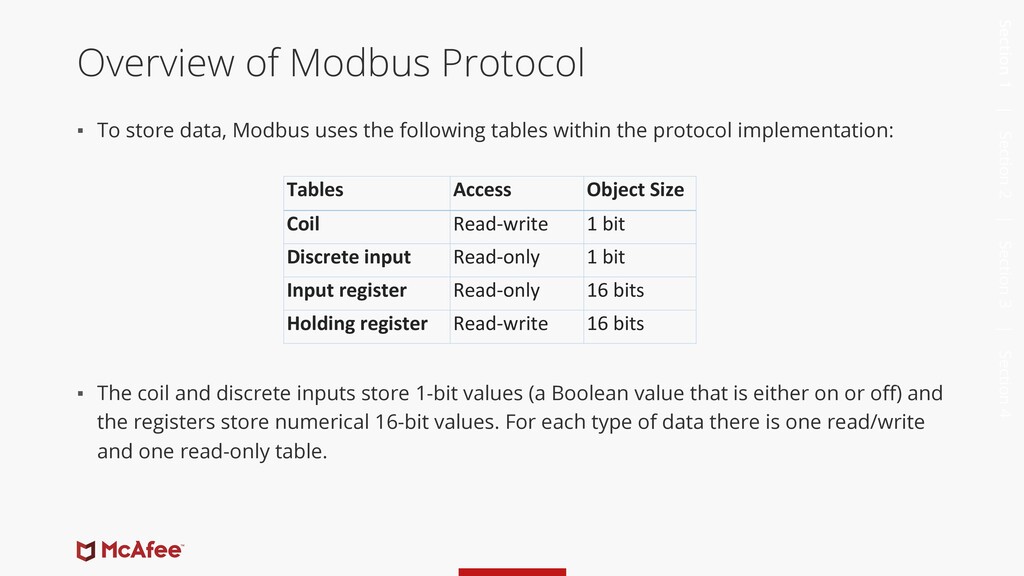
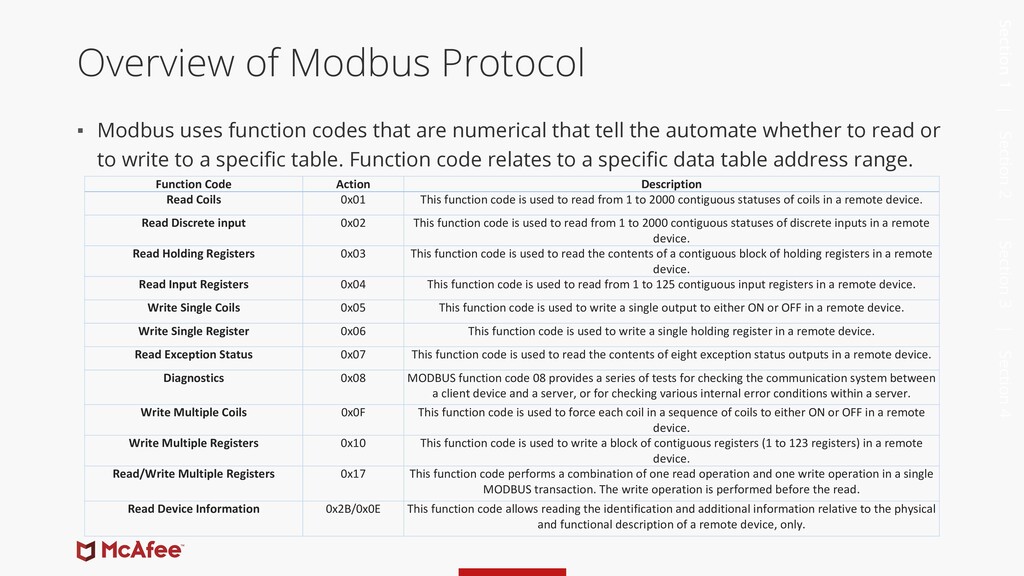
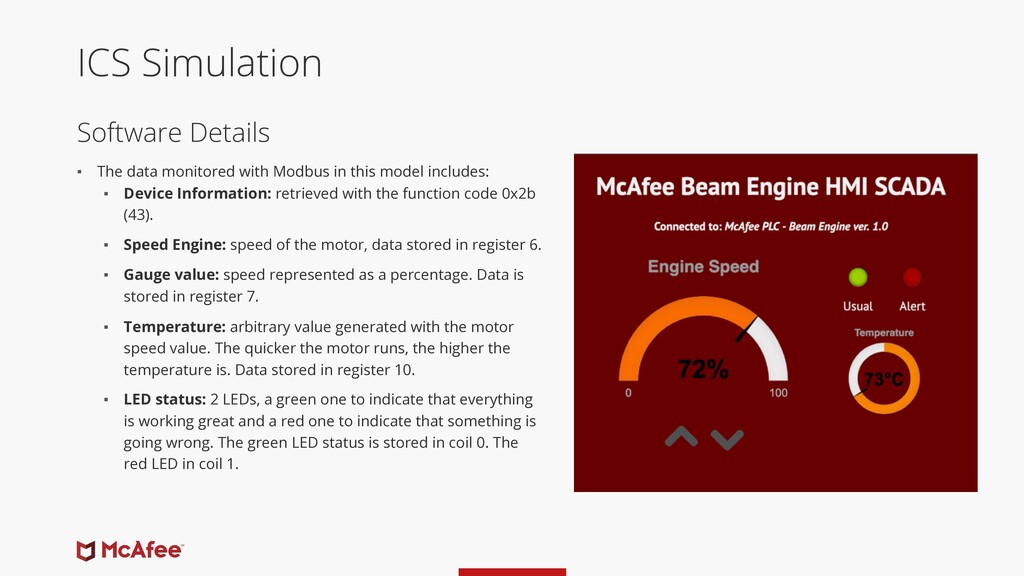
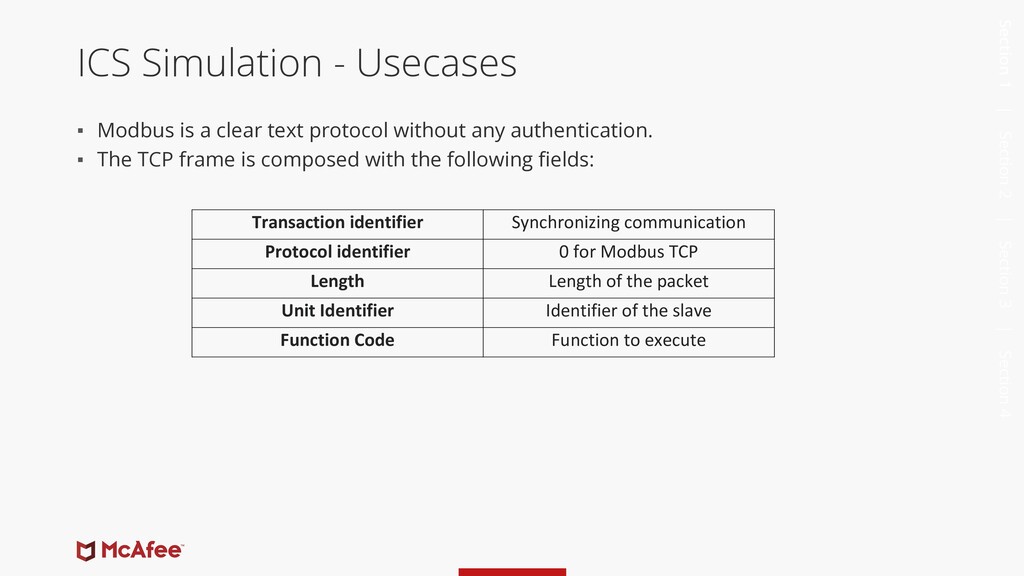
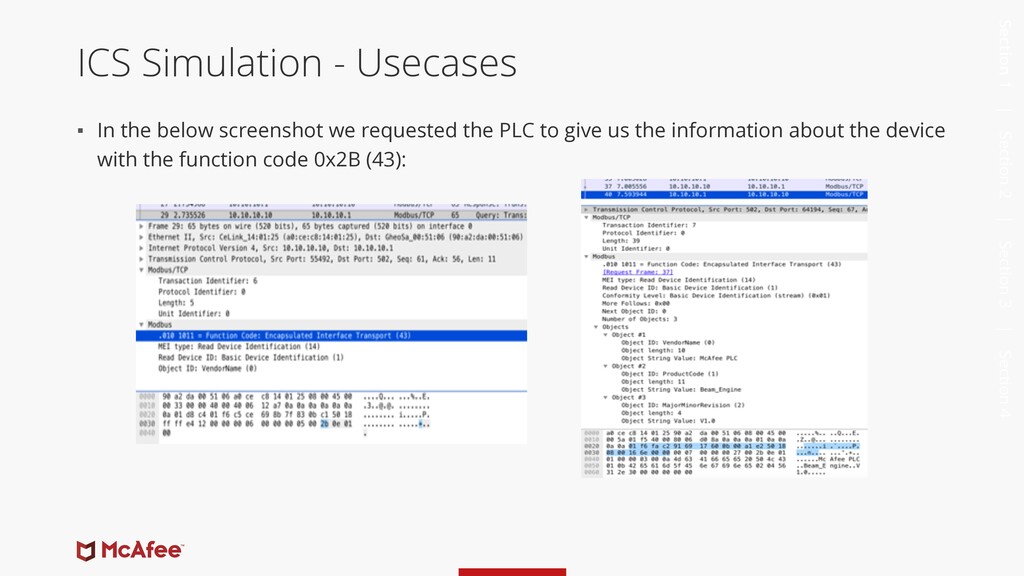
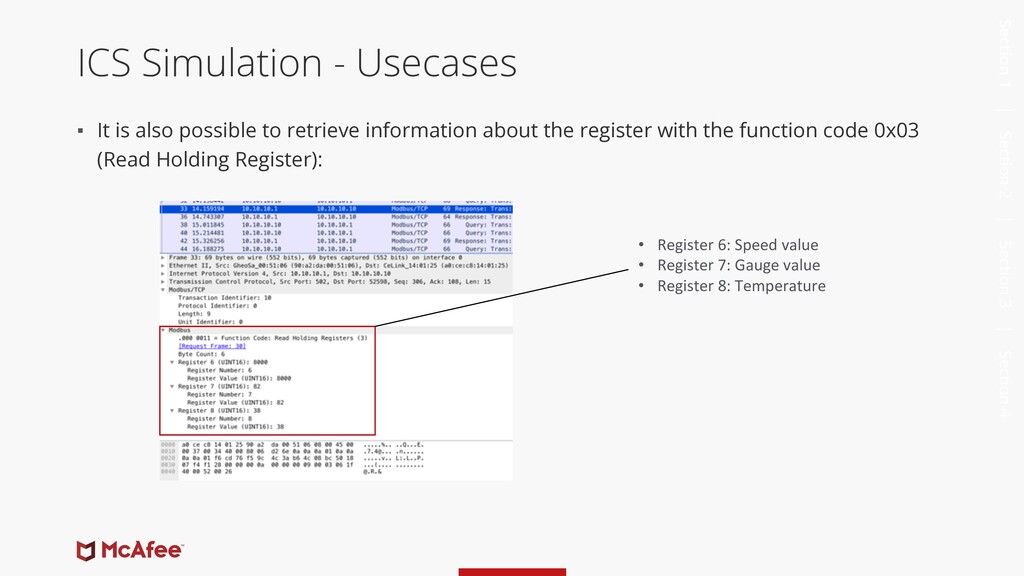
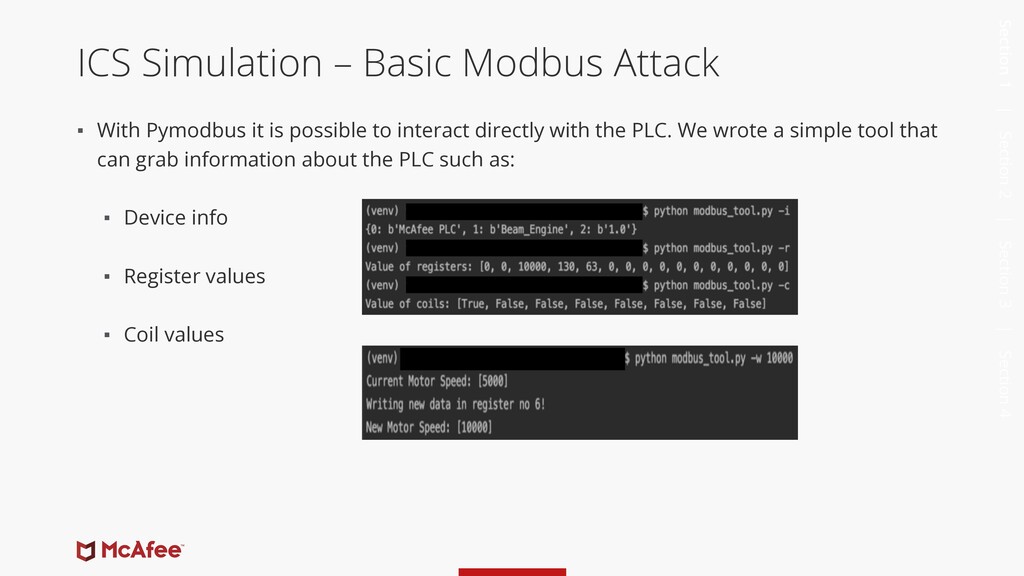
In this presentation, we will talk about the Modbus protocol, one of the most used industrial protocols and see how we can build our own low-cost ICS platform for learning and awareness purposes.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}