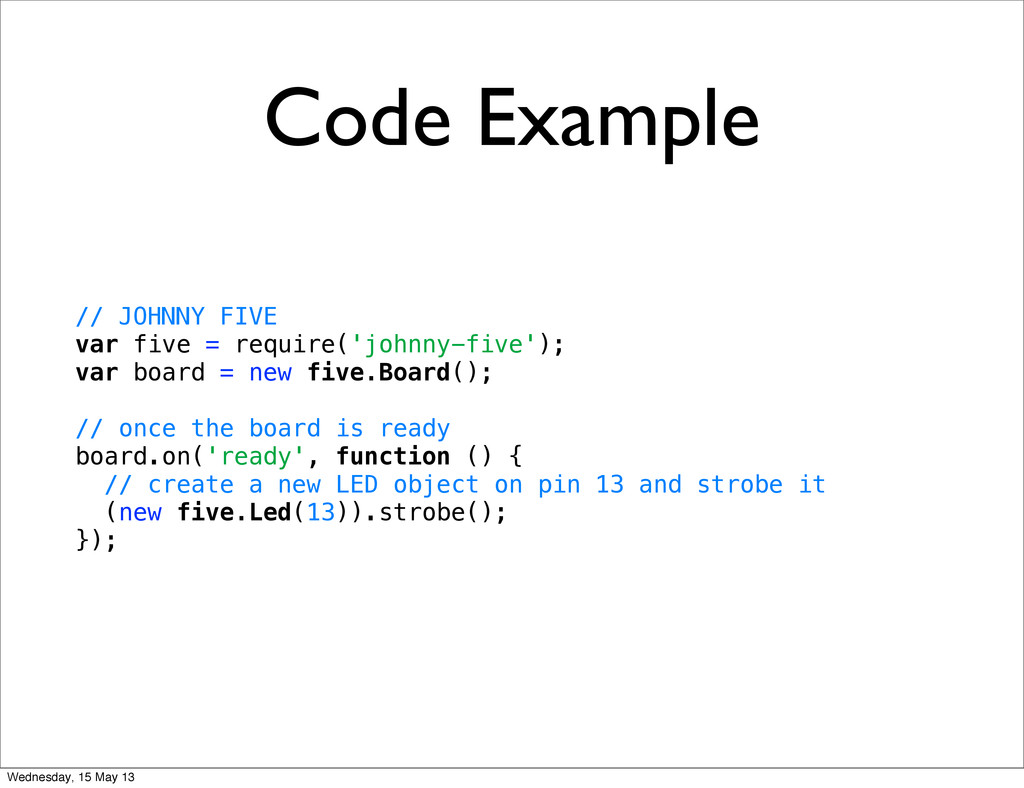
board = new five.Board(); // once the board is ready board.on('ready', function () { // create a new LED object on pin 13 and strobe it (new five.Led(13)).strobe(); }); Wednesday, 15 May 13
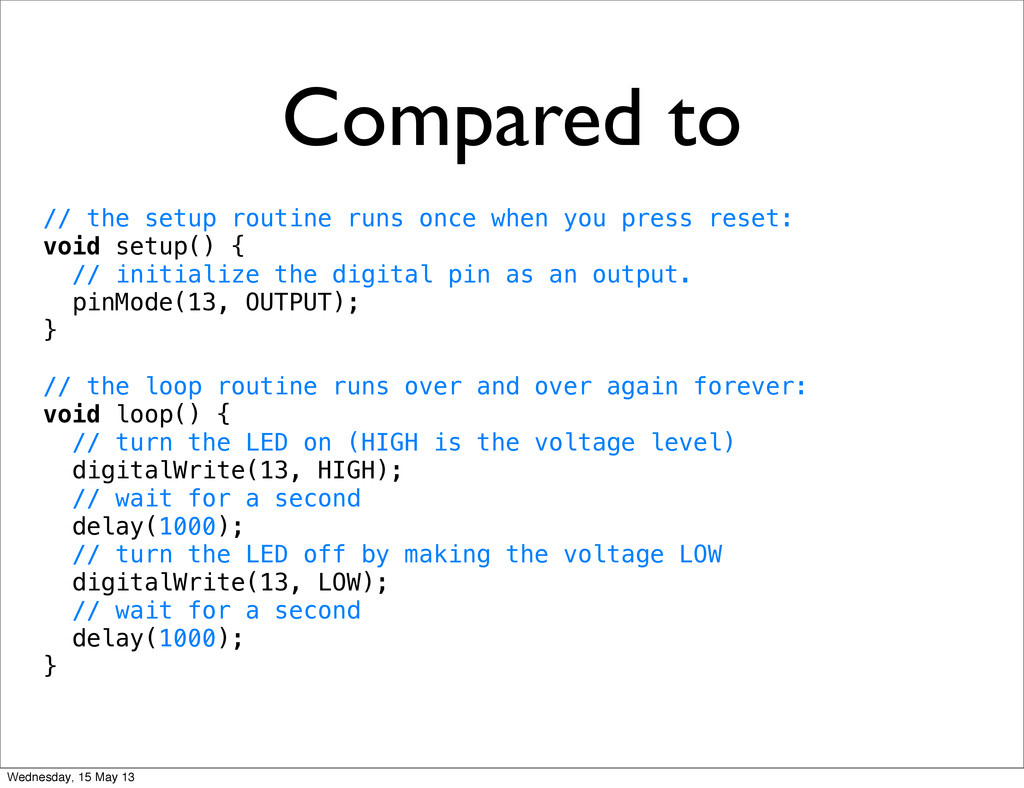
press reset: void setup() { // initialize the digital pin as an output. pinMode(13, OUTPUT); } // the loop routine runs over and over again forever: void loop() { // turn the LED on (HIGH is the voltage level) digitalWrite(13, HIGH); // wait for a second delay(1000); // turn the LED off by making the voltage LOW digitalWrite(13, LOW); // wait for a second delay(1000); } Wednesday, 15 May 13
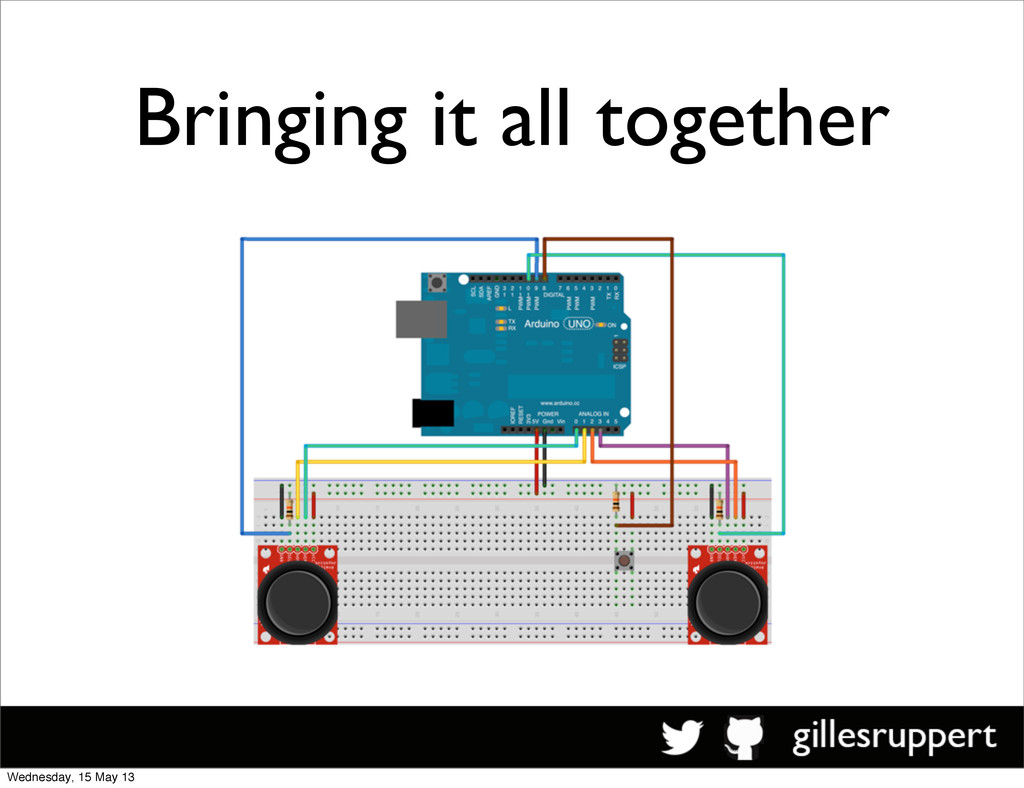
whole control centre • mash up different modules found on nodecopter.com • build an autonomous greenhouse, etc • your own fantasy is the limit! Wednesday, 15 May 13
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}