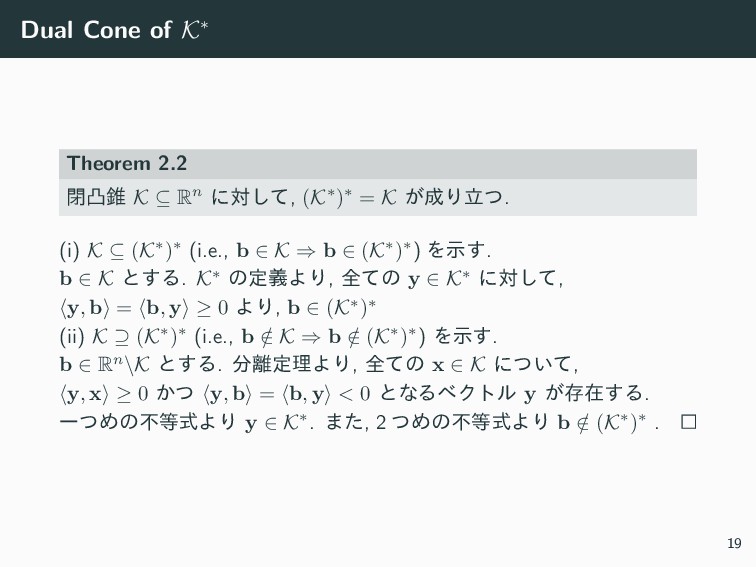
ʹରͯ͠, (K∗)∗ = K ͕Γཱͭ. (i) K ⊆ (K∗)∗ (i.e., b ∈ K ⇒ b ∈ (K∗)∗) Λࣔ͢. b ∈ K ͱ͢Δ. K∗ ͷఆٛΑΓ, શͯͷ y ∈ K∗ ʹରͯ͠, ⟨y, b⟩ = ⟨b, y⟩ ≥ 0 ΑΓ, b ∈ (K∗)∗ (ii) K ⊇ (K∗)∗ (i.e., b / ∈ K ⇒ b / ∈ (K∗)∗) Λࣔ͢. b ∈ Rn\K ͱ͢Δ. ఆཧΑΓ, શͯͷ x ∈ K ʹ͍ͭͯ, ⟨y, x⟩ ≥ 0 ͔ͭ ⟨y, b⟩ = ⟨b, y⟩ < 0 ͱͳΔϕΫτϧ y ͕ଘࡏ͢Δ. ҰͭΊͷෆࣜΑΓ y ∈ K∗. ·ͨ, 2 ͭΊͷෆࣜΑΓ b / ∈ (K∗)∗ . 19
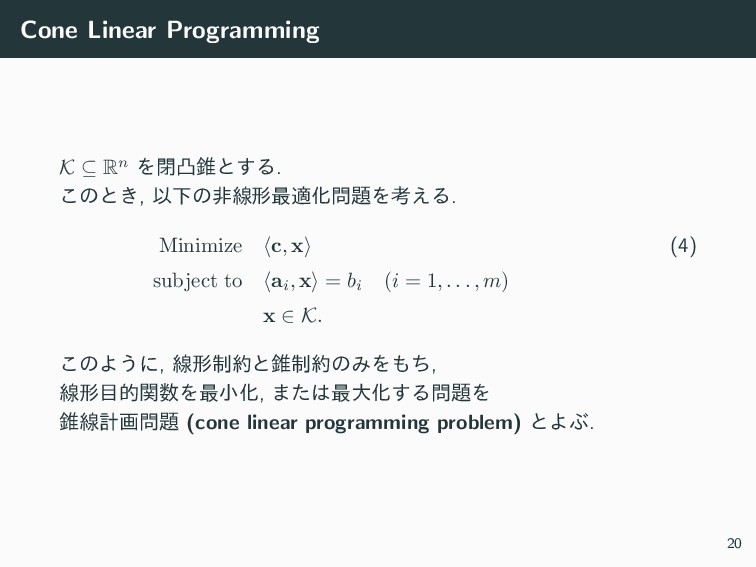
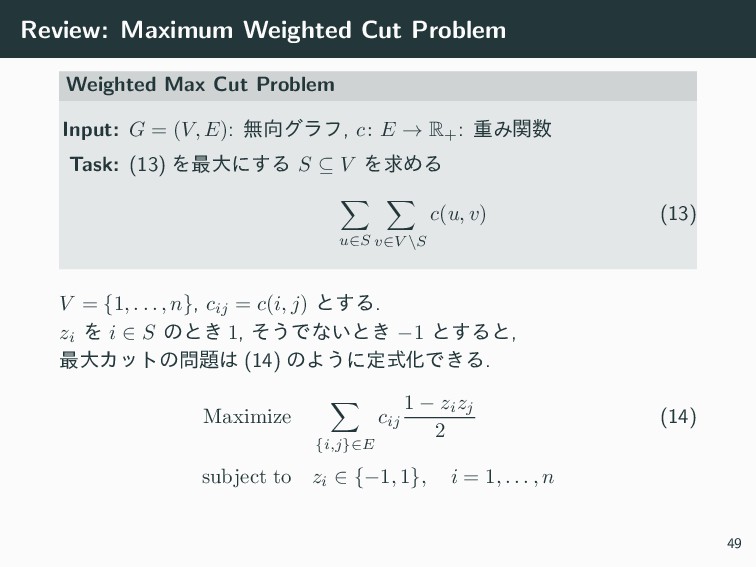
⟨c, x⟩ (4) subject to ⟨ai , x⟩ = bi (i = 1, . . . , m) x ∈ K. ͜ͷΑ͏ʹ, ઢܗ੍ͱਲ਼੍ͷΈΛͪ, ઢܗతؔΛ࠷খԽ, ·ͨ࠷େԽ͢ΔΛ ਲ਼ઢܭը (cone linear programming problem) ͱΑͿ. 20
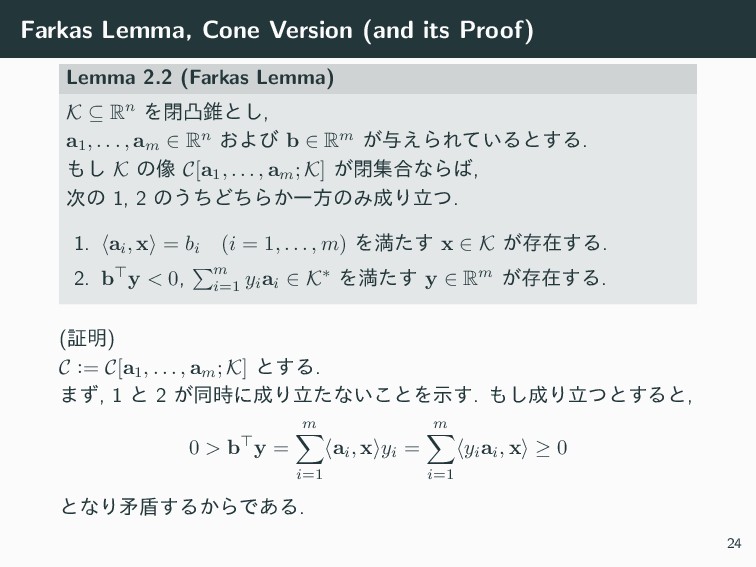
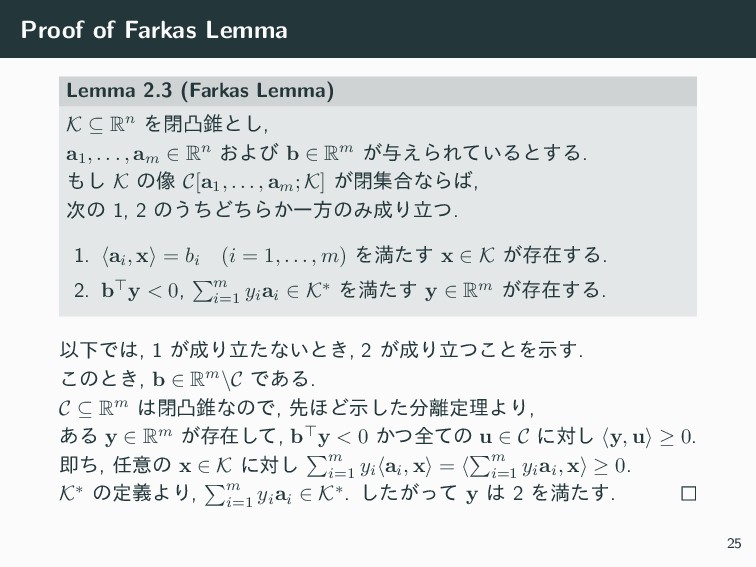
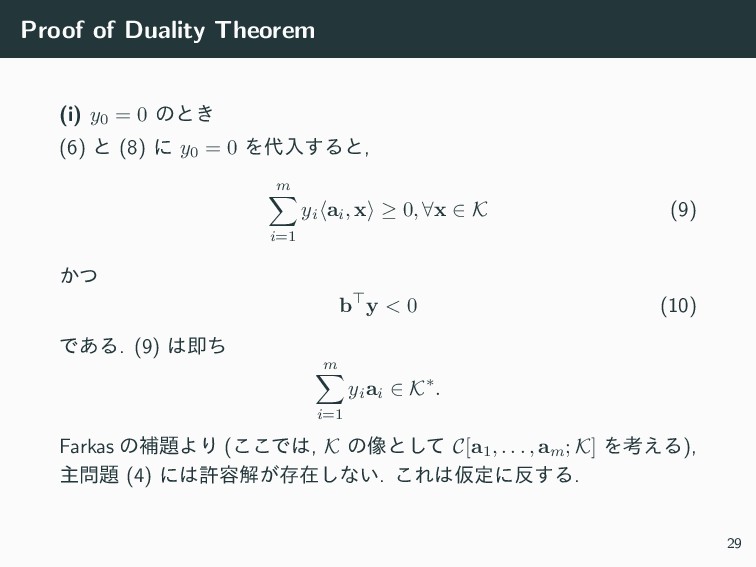
Rn Λดತਲ਼ͱ͠, a1 , . . . , am ∈ Rn ͓Αͼ b ∈ Rm ͕༩͑ΒΕ͍ͯΔͱ͢Δ. ͠ K ͷ૾ C[a1 , . . . , am ; K] ͕ดू߹ͳΒ, ࣍ͷ 1, 2 ͷ͏ͪͲͪΒ͔ҰํͷΈΓཱͭ. 1. ⟨ai , x⟩ = bi (i = 1, . . . , m) Λຬͨ͢ x ∈ K ͕ଘࡏ͢Δ. 2. b⊤y < 0, ∑ m i=1 yi ai ∈ K∗ Λຬͨ͢ y ∈ Rm ͕ଘࡏ͢Δ. ҎԼͰ, 1 ͕Γཱͨͳ͍ͱ͖, 2 ͕Γཱͭ͜ͱΛࣔ͢. ͜ͷͱ͖, b ∈ Rm\C Ͱ͋Δ. C ⊆ Rm ดತਲ਼ͳͷͰ, ઌ΄Ͳࣔͨ͠ఆཧΑΓ, ͋Δ y ∈ Rm ͕ଘࡏͯ͠, b⊤y < 0 ͔ͭશͯͷ u ∈ C ʹର͠ ⟨y, u⟩ ≥ 0. ଈͪ, ҙͷ x ∈ K ʹର͠ ∑ m i=1 yi ⟨ai , x⟩ = ⟨ ∑ m i=1 yi ai , x⟩ ≥ 0. K∗ ͷఆٛΑΓ, ∑ m i=1 yi ai ∈ K∗. ͕ͨͬͯ͠ y 2 Λຬͨ͢. 25
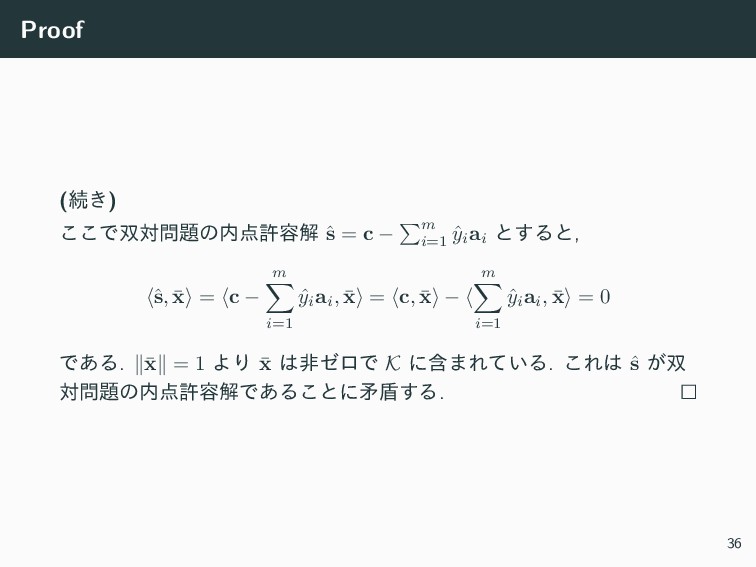
i=1 ˆ yi ai ͱ͢Δͱ, ⟨ˆ s, ¯ x⟩ = ⟨c − m ∑ i=1 ˆ yi ai , ¯ x⟩ = ⟨c, ¯ x⟩ − ⟨ m ∑ i=1 ˆ yi ai , ¯ x⟩ = 0 Ͱ͋Δ. ∥¯ x∥ = 1 ΑΓ ¯ x ඇθϩͰ K ʹؚ·Ε͍ͯΔ. ͜Ε ˆ s ͕ ରͷڐ༰ղͰ͋Δ͜ͱʹໃ६͢Δ. 36
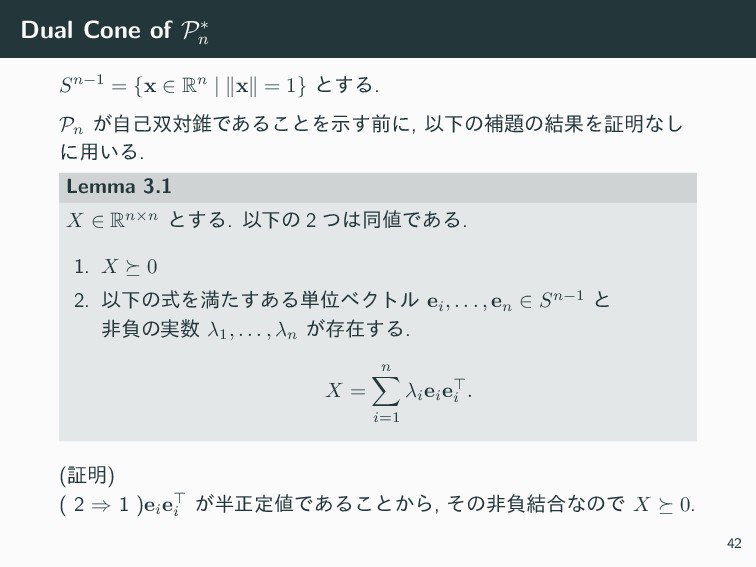
Sn = {X ∈ Rn×n | X⊤ = X}. ·ͨ, n ࣍ਖ਼ఆରশߦྻશମͷू߹ Pn ͱ͢Δ. ଈͪ, Pn = {X ∈ Rn×n | u⊤Xu ≥ 0 (∀u ∈ Rn} ⊆ Sn ·ͨ, X, Y ∈ Sn ʹରͯ͠, X ͱ Y ͷੵ • Λ X • Y = n ∑ i=1 n ∑ j=1 Xi,j Yi,j ͱఆٛ͢Δ. 39
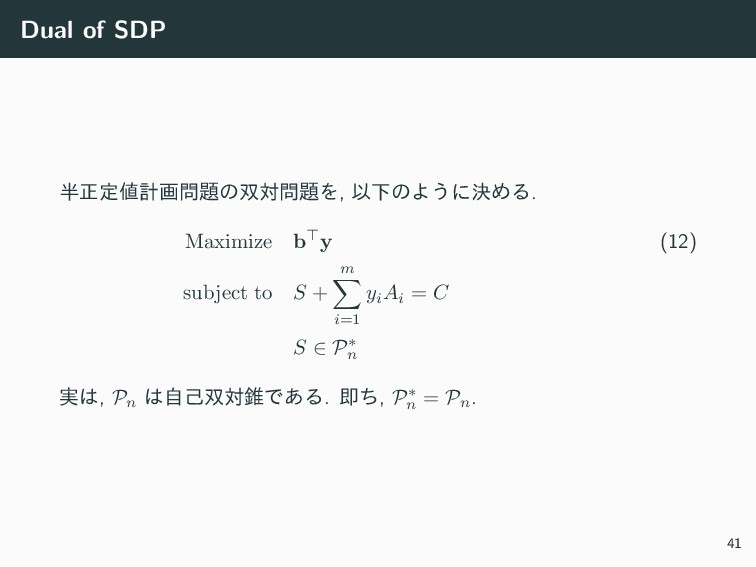
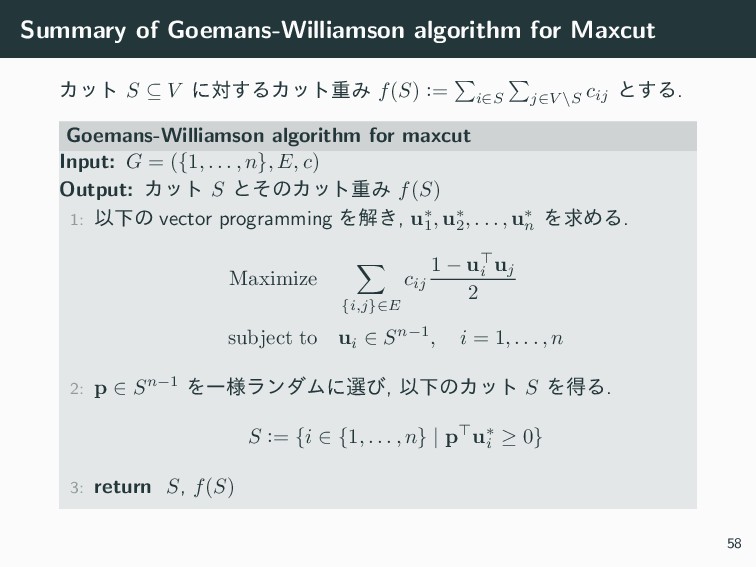
∈ R (i = 1, . . . , m) ͕༩͑ΒΕͨͱ͖ʹ, ҎԼͷ࠷దԽΛߟ͑Δ. Minimize C • X (11) subject to Ai • X = bi (i = 1, . . . , m) X ∈ Pn . ͜ΕΛ ਖ਼ఆܭը (semidefinite programming problem) ͱ͍͏. ͜ͷ, ઢܗ੍ͱਲ਼੍ͷΈΛͪ, ઢܗతؔΛ࠷খԽ, ͠ ͘࠷େԽ͢ΔͳͷͰ, ਲ਼ઢܗܭըͷҰछͰ͋Δ. 40
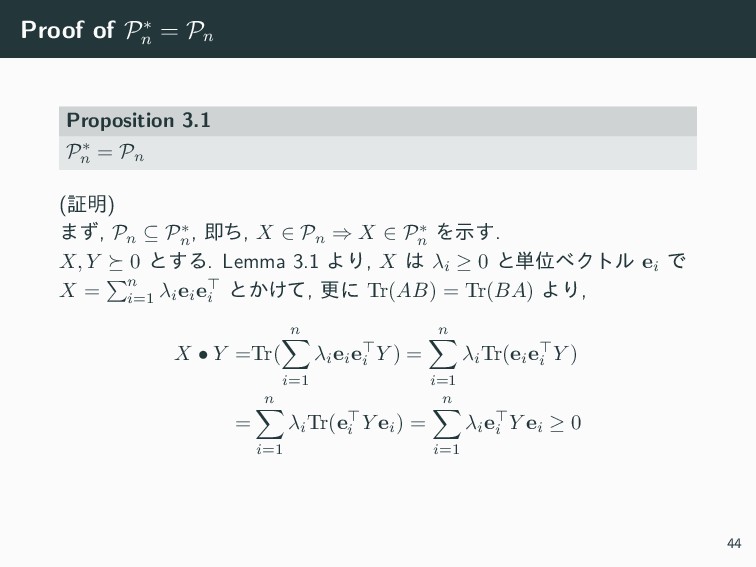
= Pn (ূ໌) ·ͣ, Pn ⊆ P∗ n , ଈͪ, X ∈ Pn ⇒ X ∈ P∗ n Λࣔ͢. X, Y ⪰ 0 ͱ͢Δ. Lemma 3.1 ΑΓ, X λi ≥ 0 ͱ୯ҐϕΫτϧ ei Ͱ X = ∑ n i=1 λi ei e⊤ i ͱ͔͚ͯ, ߋʹ Tr(AB) = Tr(BA) ΑΓ, X • Y =Tr( n ∑ i=1 λi ei e⊤ i Y ) = n ∑ i=1 λi Tr(ei e⊤ i Y ) = n ∑ i=1 λi Tr(e⊤ i Y ei ) = n ∑ i=1 λi e⊤ i Y ei ≥ 0 44
α ̸= 0, π ͷͱ͖, u, u′ ͰுΔ 2 ࣍ݩͷઢܕ෦ۭؒ L ⊆ Rn Λߟ͑Δ. p Λ L ʹࣹӨͨ͠ r ∈ L ʹ͍ͭͯ, p⊤u = r⊤u ͔ͭ p⊤u′ = r⊤u′. Αͬͯ, r ͕Լਤͷ։ۭؒ W ʹೖ͍ͬͯΔͱ͖, ͔ͭͦͷͱ͖ͷΈ, p⊤u ͱ p⊤u′ ҟͳΔΛͱΔ. p Sn−1 ͔ΒҰ༷ϥϯμϜʹબΕΔͷͰ, r ͷ͖ [0, 2π] ͔ΒҰ ༷ϥϯμϜͱͳΔ. Αͬͯ, r ∈ W ͱͳΔ֬, 2α/2π = α/π. 55
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}