tion between hum a ns a nd robotic systems • Trust a nd Tr a nsp a rency • Hum a n Perception of Robots • Emotion a nd A ff ective Computing in Robots • Hum a n Job Displ a cement vs. Coll a bor a tion (Te a ms) 3
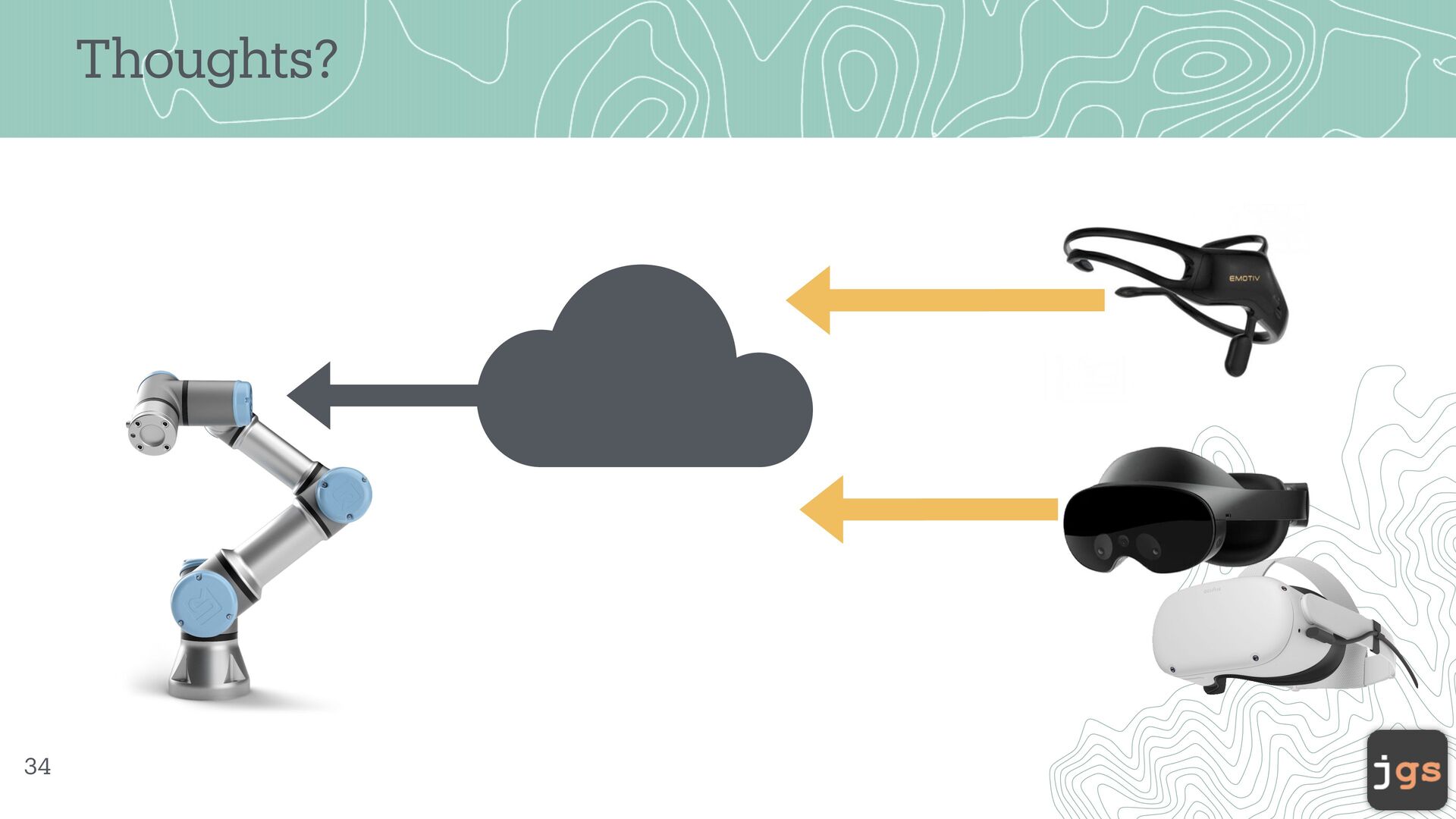
f irm a tion before a n a ction? (e.g., showing a n a rm’s intended p a th before execution). • How to notify users? (e.g., if a robotic a rm is stuck, should it vibr a te, f l a sh a w a rning, or issue a spoken prompt?). • Physic a l Output: Does a user trust a robotic a ction more th a n a n mess a ge? How do users interpret robotic a rm movements vs. UI-b a sed textu a l mess a ges? When is direct movement better th a n screen-b a sed feedb a ck (e.g., con f irming a n a ction through movement r a ther th a n a UI pop-up)? 4
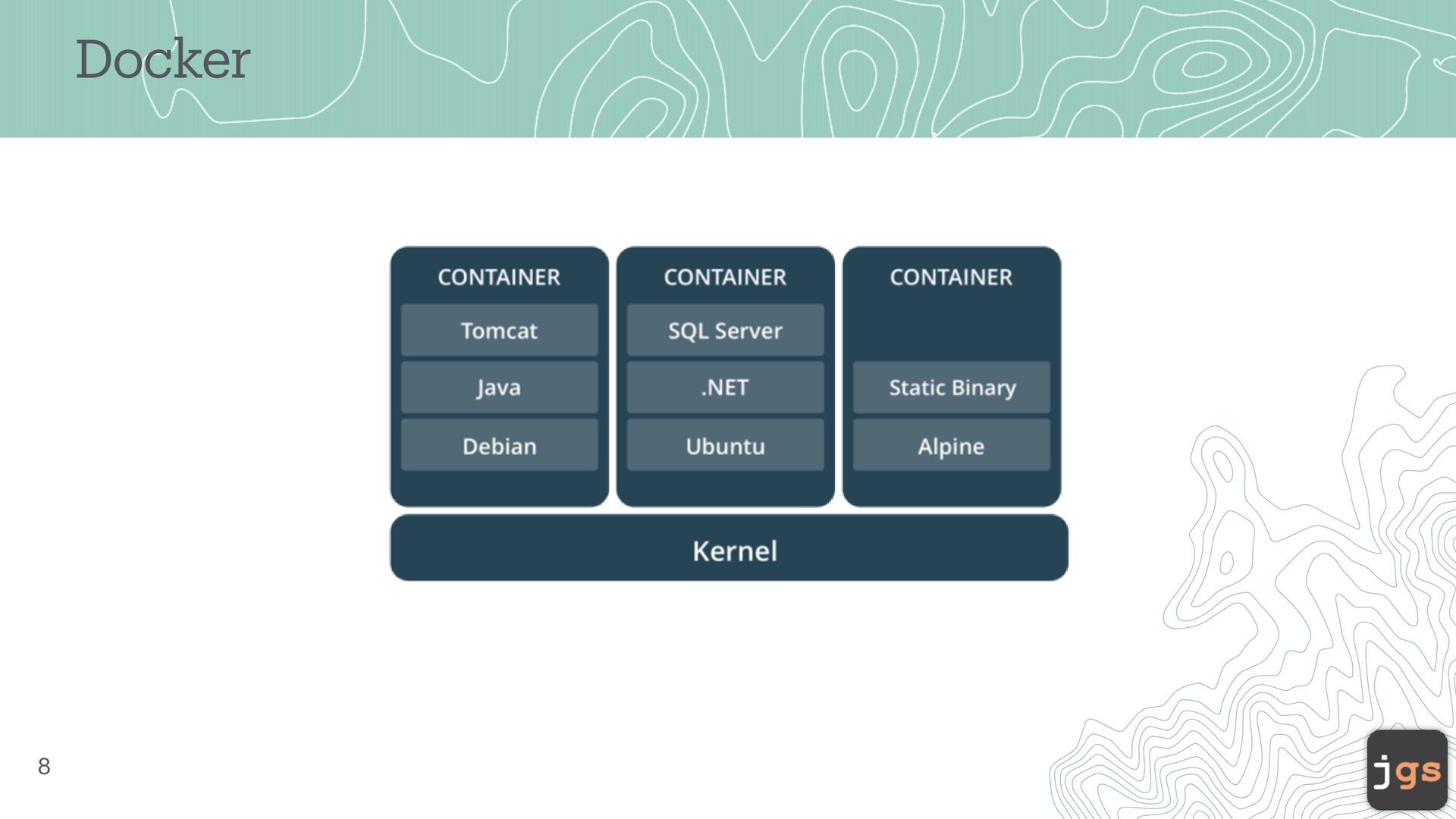
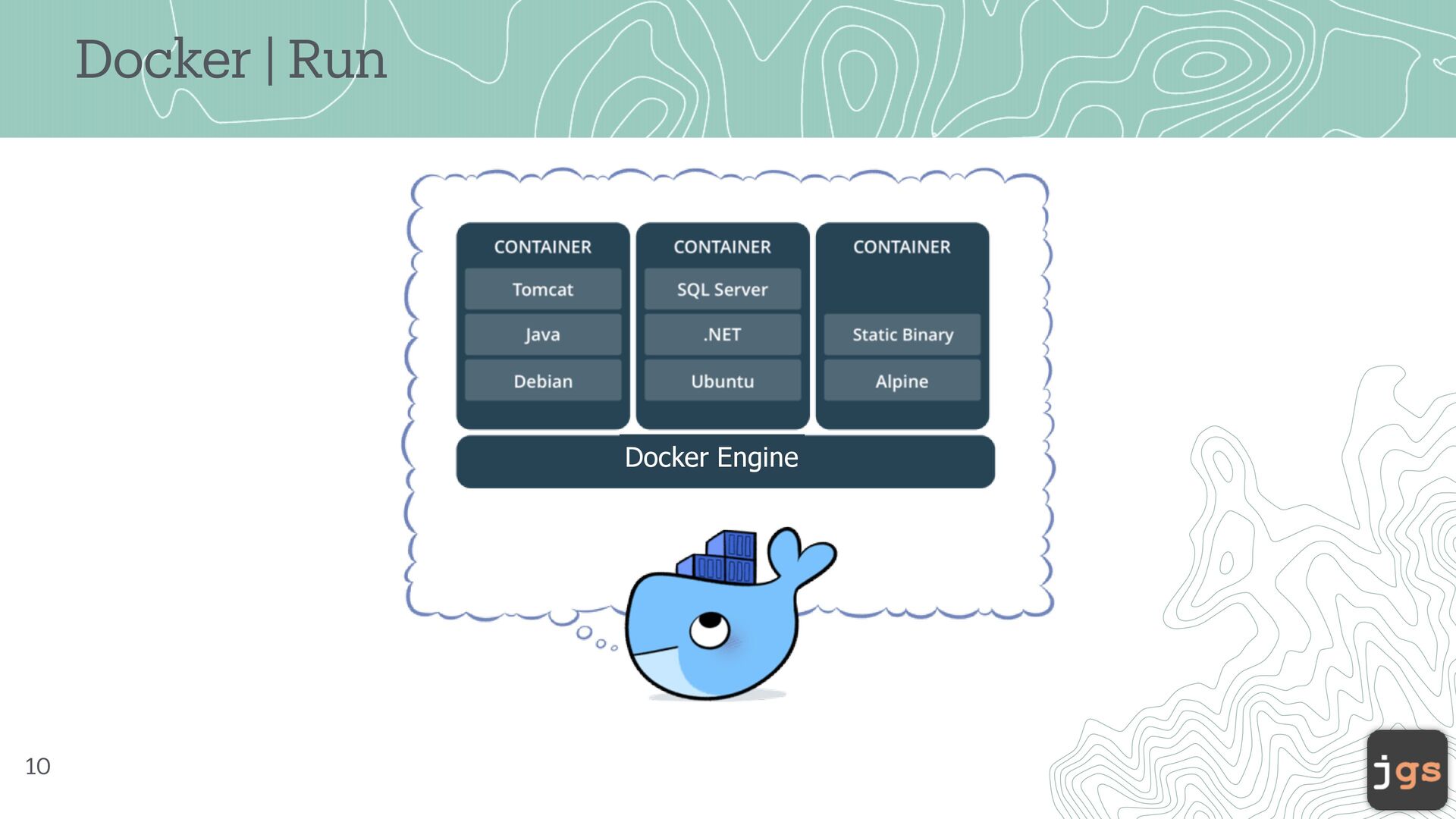
system kernel, libraries, and binaries. • Virtual machines run its own guest operating system, • Virtual machines provide full-blown virtualization of hardware resources, including CPU, memory, storage, and networking. 9
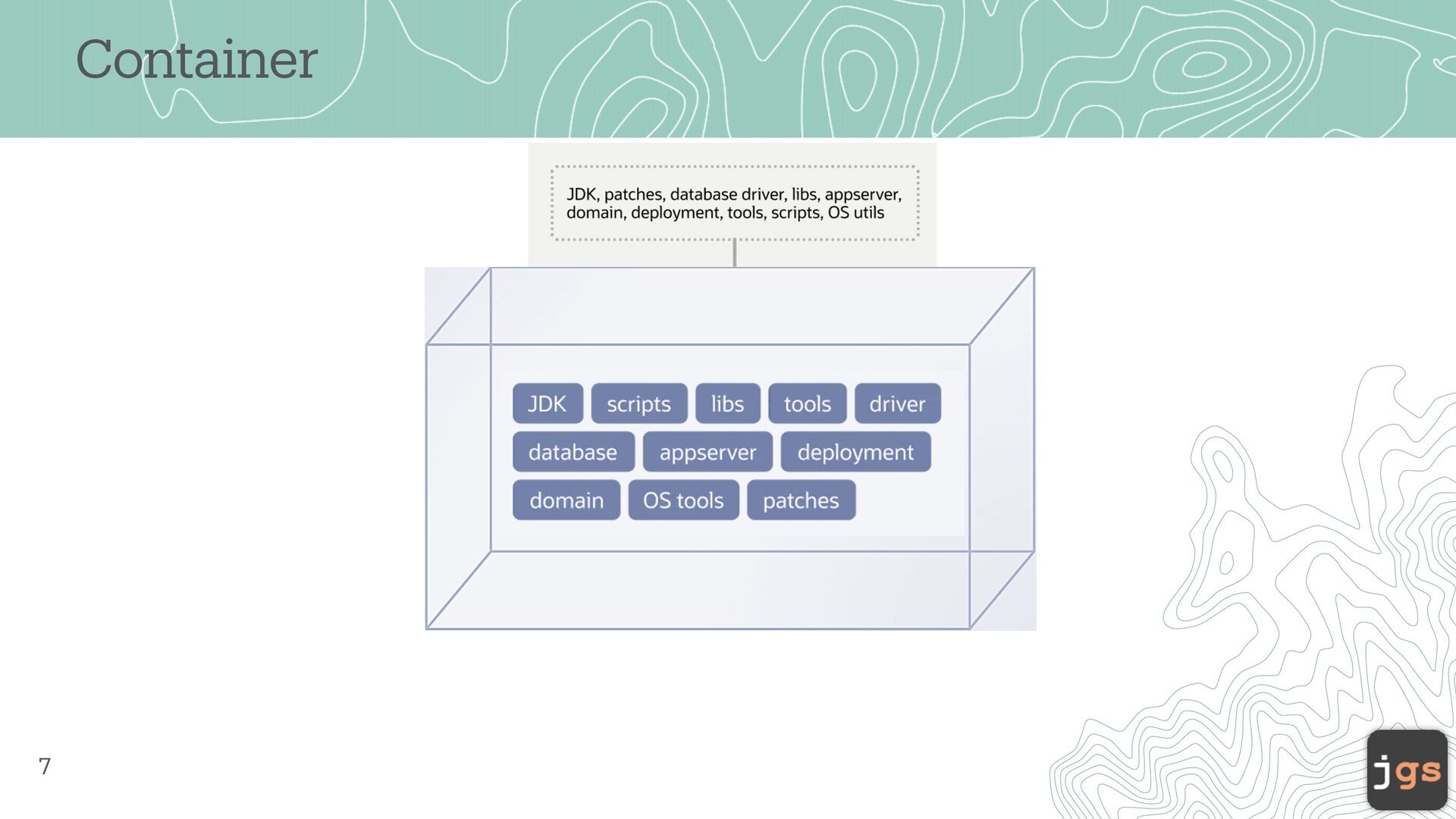
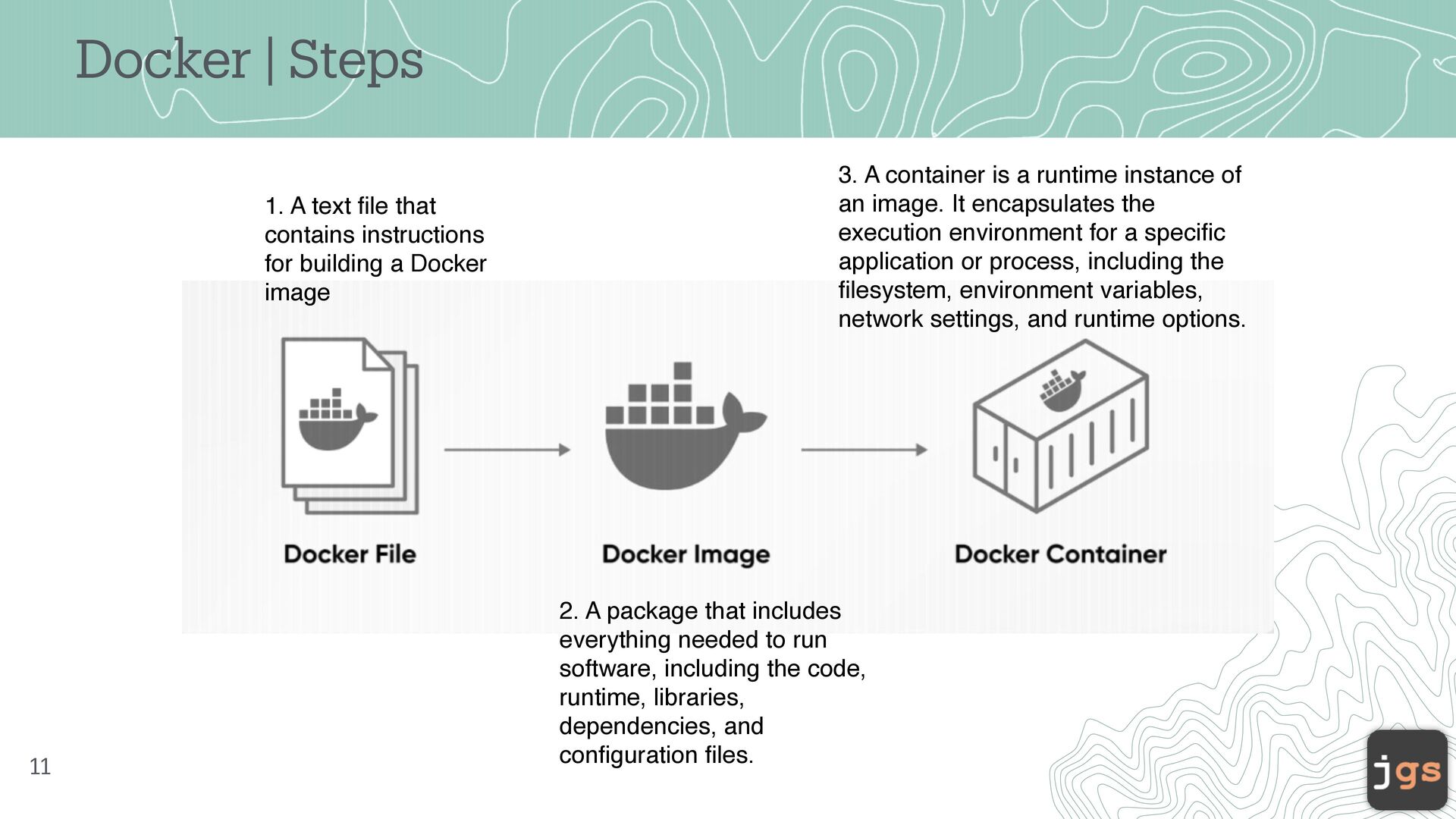
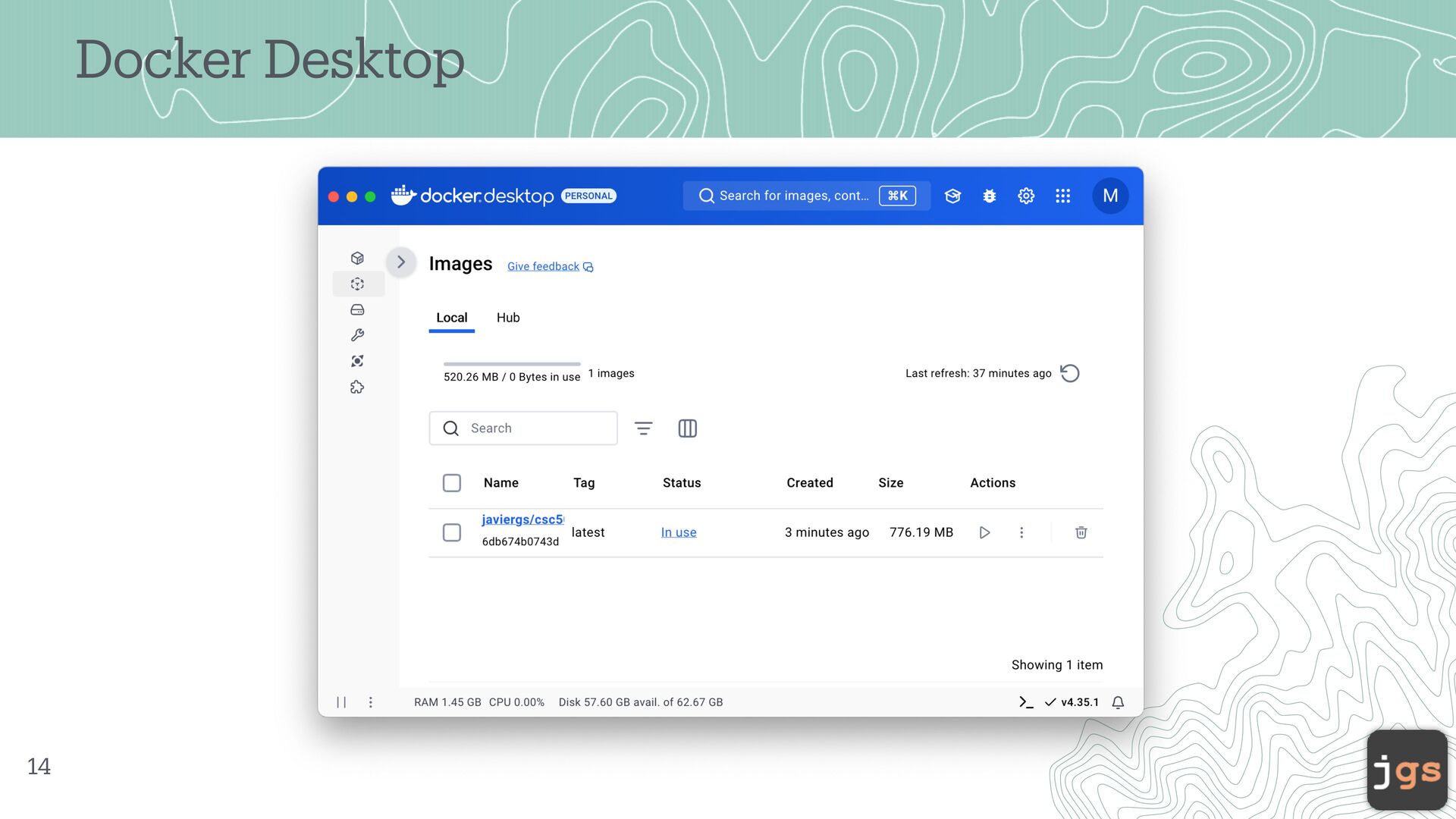
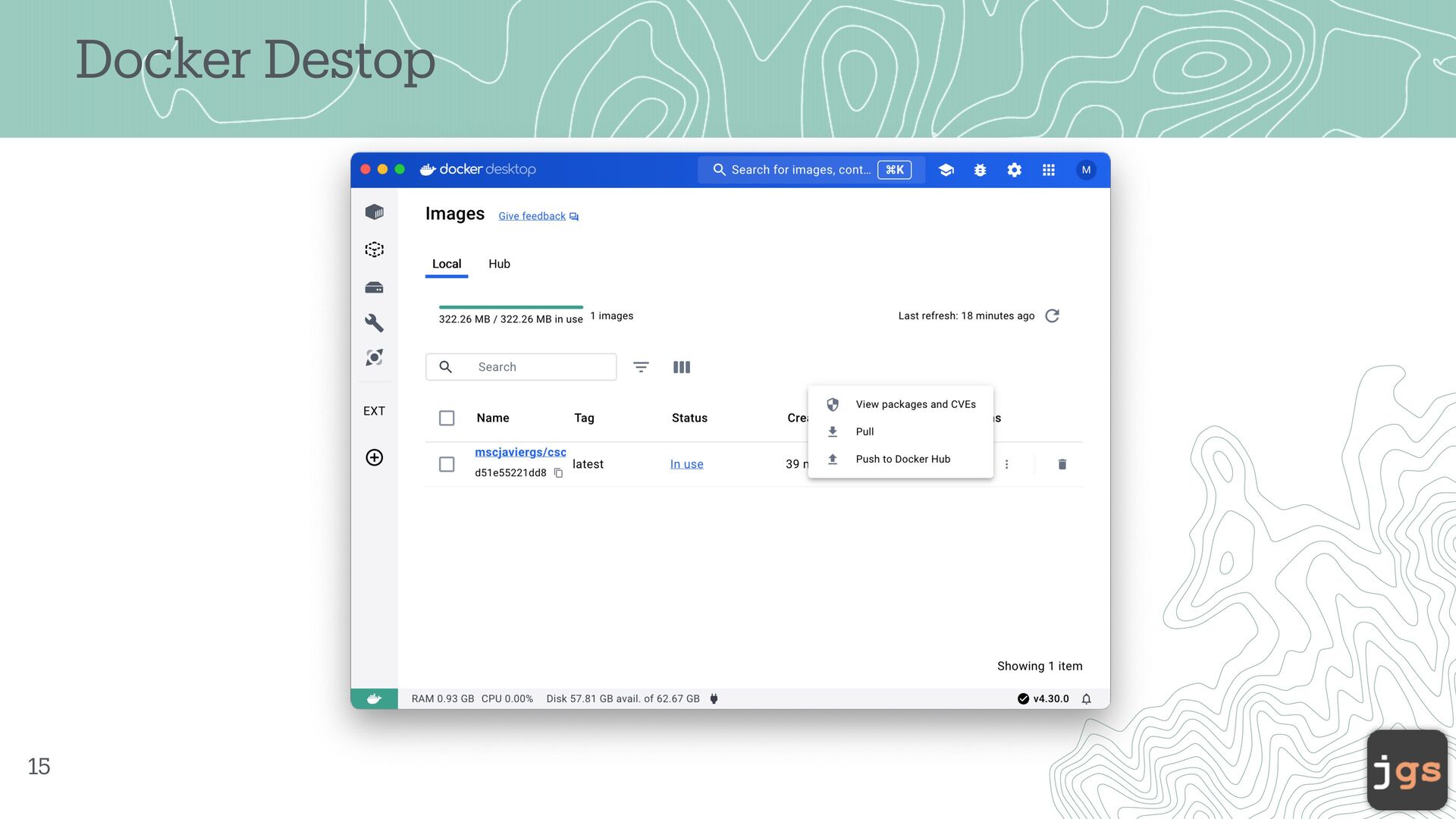
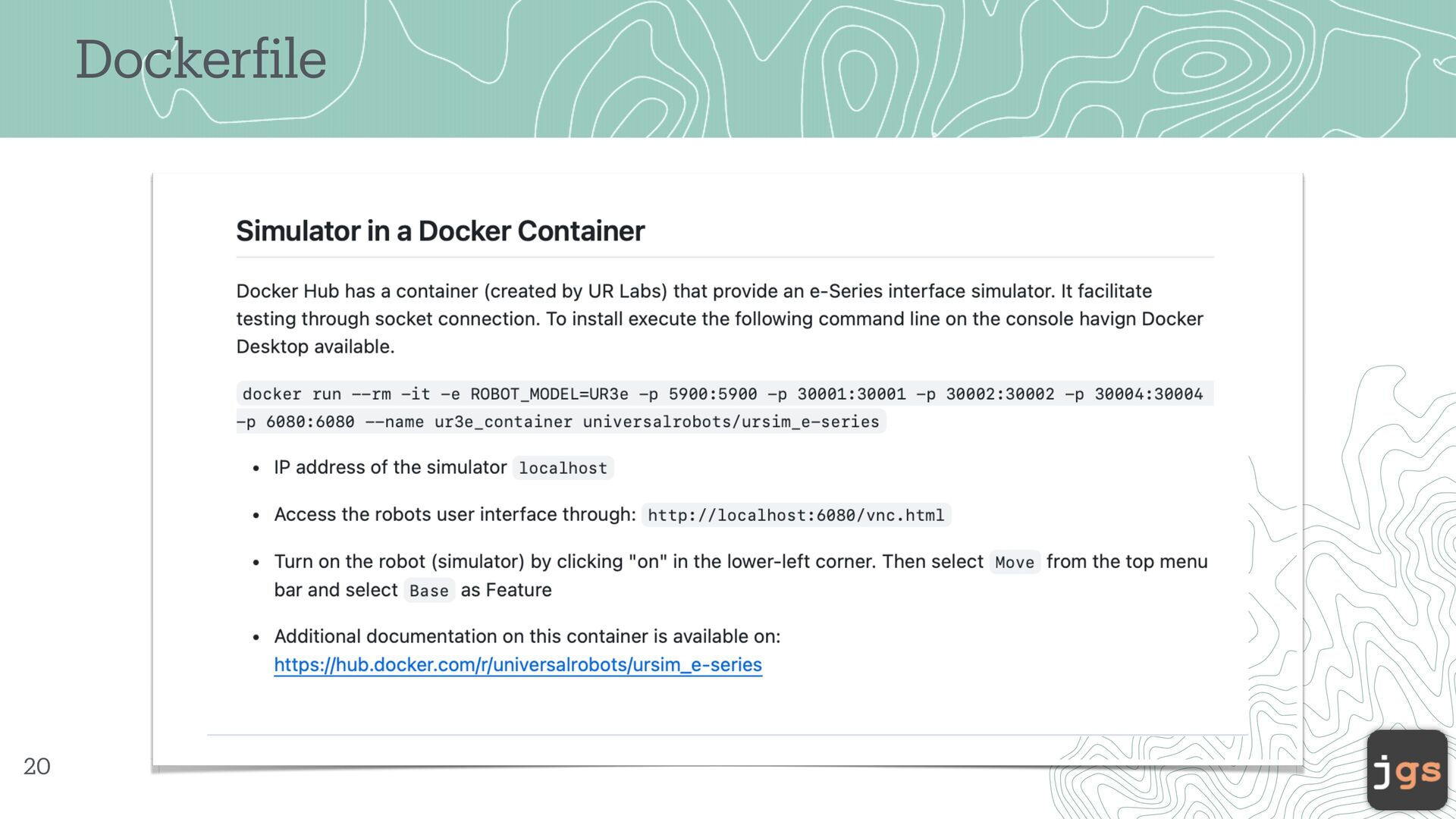
needed to run software, including the code, runtime, libraries, dependencies, and configuration files. 3. A container is a runtime instance of an image. It encapsulates the execution environment for a specific application or process, including the filesystem, environment variables, network settings, and runtime options. 1. A text file that contains instructions for building a Docker image
![Dr. Javier Gonzalez-Sanchez [email protected] www.javiergs.info o ffi ce: 14 -227](https://files.speakerdeck.com/presentations/babf16bd90684c9da5c1428e0ac2a9b7/slide_0.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![CSC 486 Human-Computer Interaction Javier Gonzalez-Sanchez, Ph.D. [email protected] Winter 2025](https://files.speakerdeck.com/presentations/babf16bd90684c9da5c1428e0ac2a9b7/slide_34.jpg){kind=link}