Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
Collision Prediction and Visual Explanation Gen...
Search
Semantic Machine Intelligence Lab., Keio Univ.
PRO
September 06, 2021
Technology
1.8k
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
Collision Prediction and Visual Explanation Generation for Object Placement Task by Domestic Service Robots
Semantic Machine Intelligence Lab., Keio Univ.
PRO
September 06, 2021
More Decks by Semantic Machine Intelligence Lab., Keio Univ.
See All by Semantic Machine Intelligence Lab., Keio Univ.
[Journal club] Predict Before You Explore: Predictive Planning with Specialized Memory for Embodied Question Answering
keio_smilab
PRO
0
85
[Journal club] PHyCLIP: 𝒍𝟏-Product of Hyperbolic Factors Unifies Hierarchy and Compositionality in Vision-Language Representation Learning
keio_smilab
PRO
0
86
[Journal club] ReMEmbR: Building and Reasoning Over Long-Horizon Spatio-Temporal Memory for Robot Navigation
keio_smilab
PRO
0
110
[Journal club] ReLaGS: Relational Language Gaussian Splatting
keio_smilab
PRO
0
120
[Journal club] Flow as the Cross-Domain Manipulation Interface
keio_smilab
PRO
0
98
Mobi-𝜋: Mobilizing Your Robot Learning Policy
keio_smilab
PRO
0
160
A Gentle Introduction to Transformers
keio_smilab
PRO
16
7k
FlowAR: Scale-wise Autoregressive Image Generation Meets Flow Matching
keio_smilab
PRO
0
60
[Journal club] VLA-Adapter: An Effective Paradigm for Tiny-Scale Vision-Language-Action Model
keio_smilab
PRO
1
150
Other Decks in Technology
See All in Technology
AIツールを導入しても生産性はあがらない? カオナビが直面した 3つの壁と乗り越え方。/ Overcoming 3 Barriers to AI-Driven Productivity at kaonavi
kaonavi
0
170
文字起こし基盤の信頼性
abnoumaru
0
120
第67回コンピュータビジョン勉強会CVPR2026読会前編
tsukamotokenji
0
160
ファミコンでPHPを動かす / PHP on the Famicom
tomzoh
2
610
AIエージェントがあれば技術書なんてすぐ書けるでしょ→無理でした
watany
2
260
Oracle Exadata Database Service on Cloud@Customer X11M (ExaDB-C@C) サービス概要
oracle4engineer
PRO
2
8.5k
設計レビューとAIハーネスで向き合う AIが生み出した新しいボトルネックの対処法 / Design Reviews and AI Harnesses Against New Bottlenecks Created by AI
nstock
4
430
Jitera Company Deck
jitera
0
270
変更し続けられるシステムをどう保つか — AI時代のSSoTという設計原則
kawauso
1
1.1k
AI Coding Agent時代のcdk-nagガードレール 〜組織ルールを強制CIで守り抜く設計の挑戦〜
mhrtech
3
510
大量データに対しても、生成AIを用いてリーズナブルにデータ加工をしたい!Databricksのai_queryについて調べてみた
kamoshika
1
280
「休む」重要さ
smt7174
6
1.6k
Featured
See All Featured
What Being in a Rock Band Can Teach Us About Real World SEO
427marketing
0
1.1k
A Soul's Torment
seathinner
6
3.1k
Stewardship and Sustainability of Urban and Community Forests
pwiseman
0
370
Testing 201, or: Great Expectations
jmmastey
46
8.2k
A better future with KSS
kneath
240
18k
Principles of Awesome APIs and How to Build Them.
keavy
128
18k
Exploring the relationship between traditional SERPs and Gen AI search
raygrieselhuber
PRO
2
4.2k
Paper Plane
katiecoart
PRO
2
52k
WENDY [Excerpt]
tessaabrams
11
38k
[RailsConf 2023 Opening Keynote] The Magic of Rails
eileencodes
31
10k
Imperfection Machines: The Place of Print at Facebook
scottboms
270
14k
The Director’s Chair: Orchestrating AI for Truly Effective Learning
tmiket
1
220
Transcript
畑中駿平1,上田雄斗1,植田有咲1,平川翼2,山下隆義2,藤吉弘亘2,杉浦孔明1 1慶應義塾大学,2中部大学 生活支援ロボットによる物体配置タスクにおける 危険性予測および視覚的説明生成
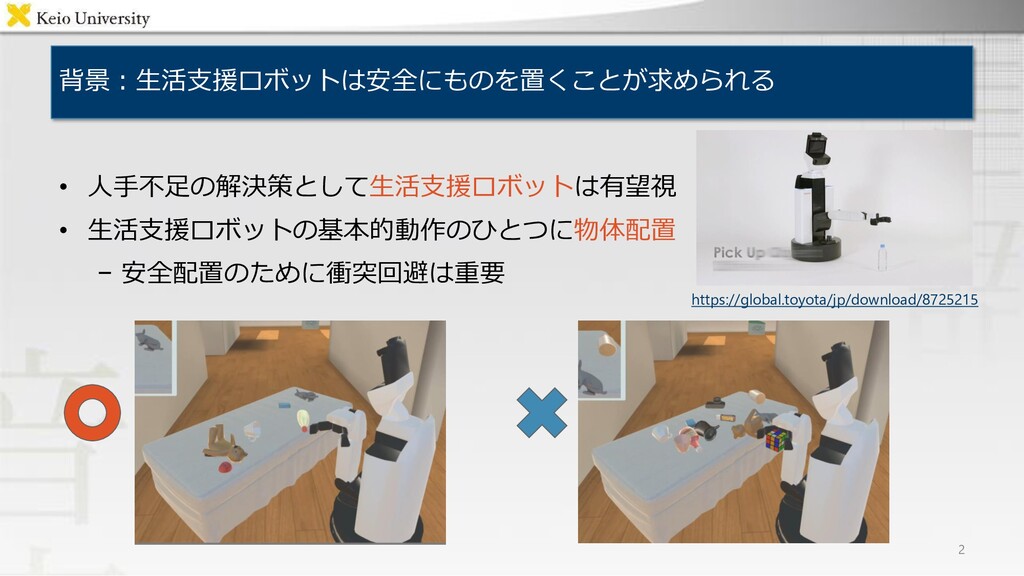
背景:生活支援ロボットは安全にものを置くことが求められる • 人手不足の解決策として生活支援ロボットは有望視 • 生活支援ロボットの基本的動作のひとつに物体配置 − 安全配置のために衝突回避は重要 2 https://global.toyota/jp/download/8725215
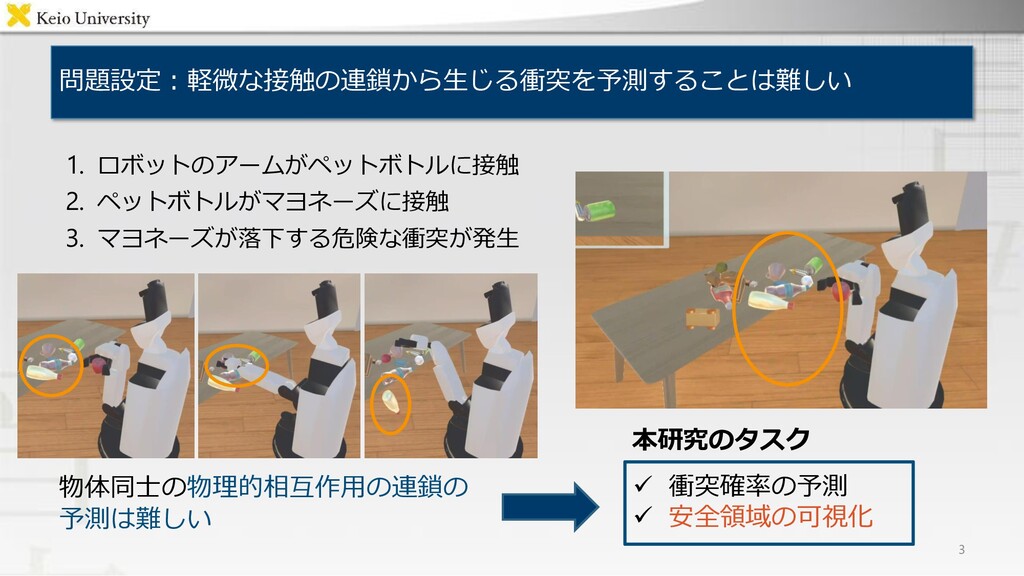
問題設定:軽微な接触の連鎖から生じる衝突を予測することは難しい 1. ロボットのアームがペットボトルに接触 2. ペットボトルがマヨネーズに接触 3. マヨネーズが落下する危険な衝突が発生 物体同士の物理的相互作用の連鎖の 予測は難しい 3
✓ 衝突確率の予測 ✓ 安全領域の可視化 本研究のタスク
既存研究:生活支援ロボットが行うべき代表的なサブタスク 4 サブタスク 代表的研究 概要 Pick & Place [Zeng+, ICRA18]
新規の物体を把持して認識可能 Grasping DIRL [Tanwani+, CoRL20] 敵対的学習を用いた実環境転用 Placing PonNet [Magassouba+, AR21] Transformer PonNet [植田+, JSAI21] Attention Branch Network [Fukui+, CVPR19] を 用いて物体同士の衝突確率を予測 DIRL Transformer PonNet [Zeng+, ICRA18]
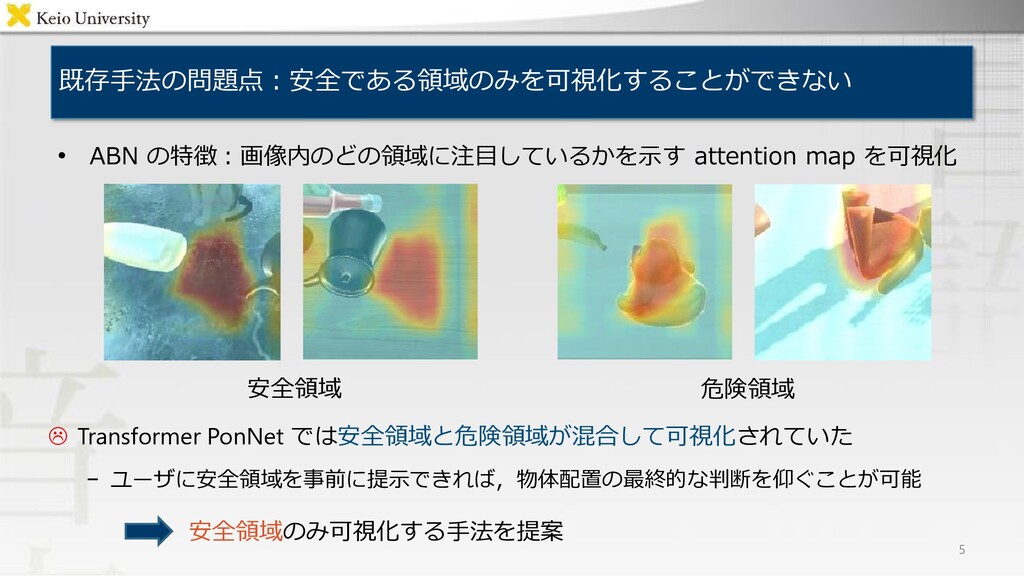
既存手法の問題点:安全である領域のみを可視化することができない Transformer PonNet では安全領域と危険領域が混合して可視化されていた − ユーザに安全領域を事前に提示できれば,物体配置の最終的な判断を仰ぐことが可能 5 安全領域 危険領域
安全領域のみ可視化する手法を提案 • ABN の特徴:画像内のどの領域に注目しているかを示す attention map を可視化
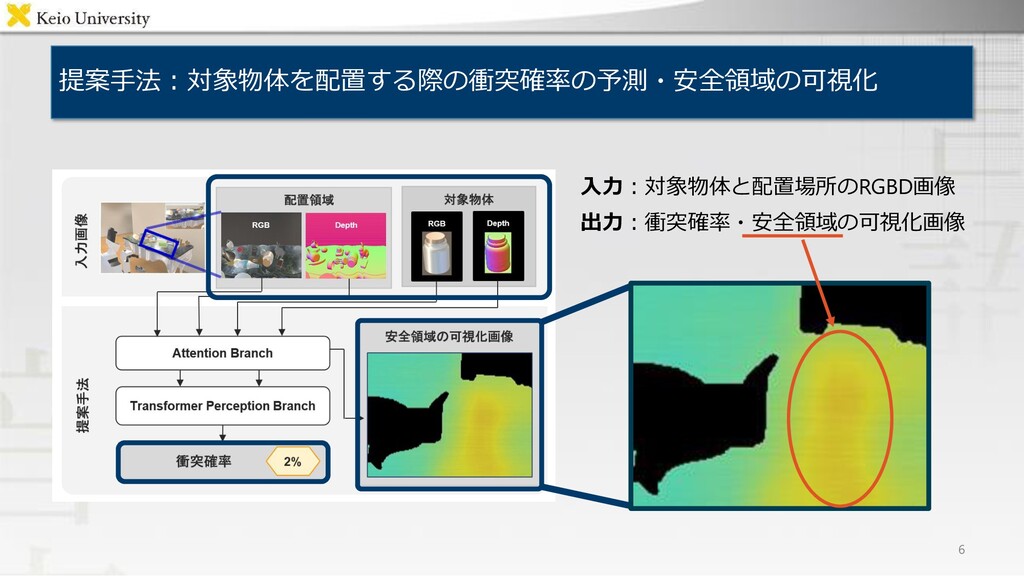
提案手法:対象物体を配置する際の衝突確率の予測・安全領域の可視化 6 入力:対象物体と配置場所のRGBD画像 出力:衝突確率・安全領域の可視化画像
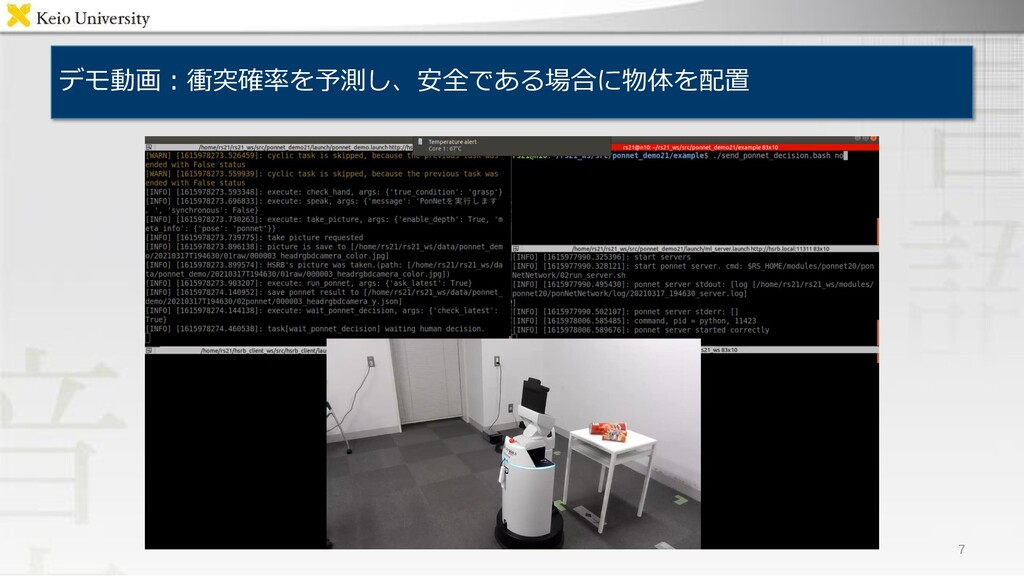
デモ動画:衝突確率を予測し、安全である場合に物体を配置 7
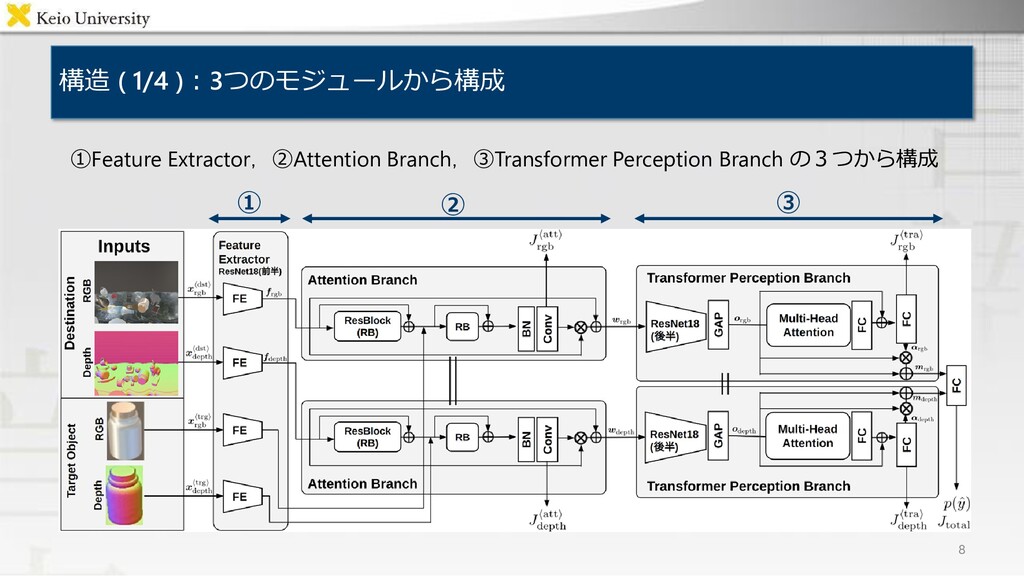
構造 ( 1/4 ):3つのモジュールから構成 8 ①Feature Extractor,②Attention Branch,③Transformer Perception Branch
の3つから構成 ① ② ③
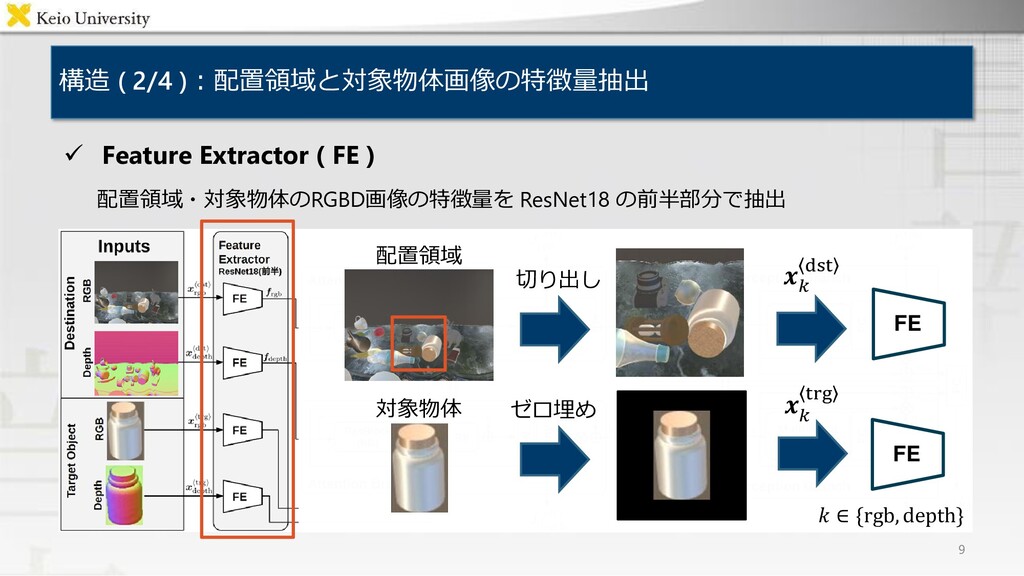
✓ Feature Extractor ( FE ) 配置領域・対象物体のRGBD画像の特徴量を ResNet18 の前半部分で抽出 構造
( 2/4 ):配置領域と対象物体画像の特徴量抽出 9 切り出し ゼロ埋め 𝒙 𝑘 dst 𝒙 𝑘 trg 𝑘 ∈ {rgb, depth} FE FE 配置領域 対象物体
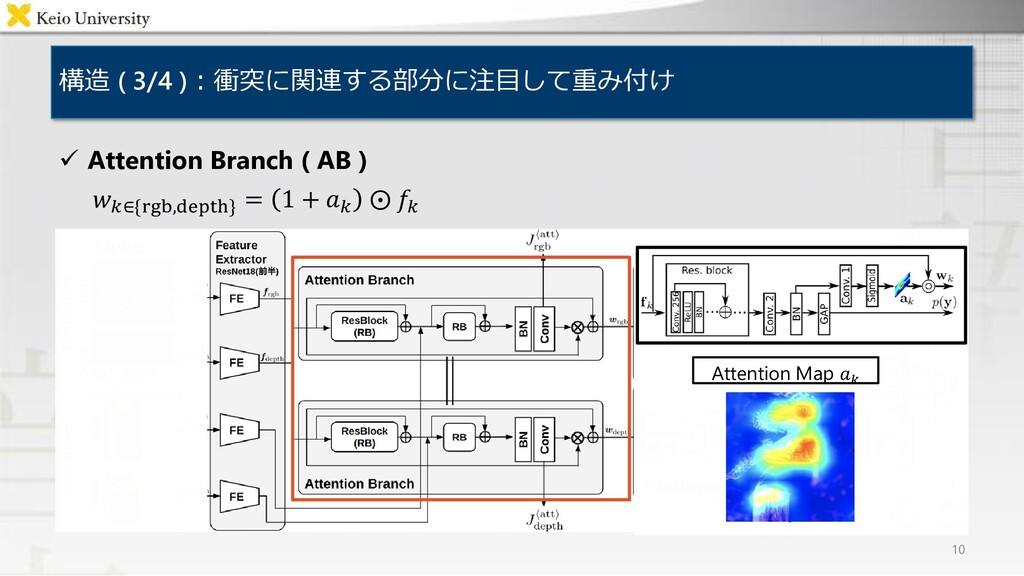
構造 ( 3/4 ):衝突に関連する部分に注目して重み付け ✓ Attention Branch ( AB )
𝑤𝑘∈{rgb,depth} = 1 + 𝑎𝑘 ⨀ 𝑓𝑘 10 Attention Map 𝑎𝑘
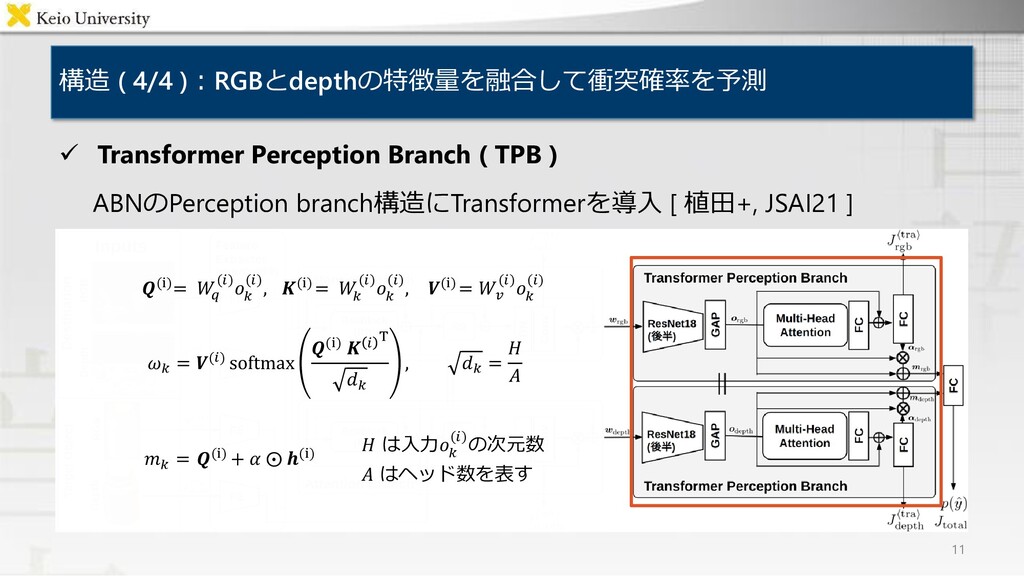
構造 ( 4/4 ):RGBとdepthの特徴量を融合して衝突確率を予測 ✓ Transformer Perception Branch ( TPB
) ABNのPerception branch構造にTransformerを導入 [ 植田+, JSAI21 ] 11 𝑸(i)= 𝑊 𝑞 (𝑖)𝑜 𝑘 (𝑖), 𝑲(i) = 𝑊 𝑘 (𝑖)𝑜 𝑘 (𝑖), 𝑽(i) = 𝑊𝑣 (𝑖)𝑜 𝑘 (𝑖) 𝜔𝑘 = 𝑽(𝑖) softmax 𝑸(i) 𝑲 𝑖 T 𝑑𝑘 , 𝑑𝑘 = 𝐻 𝐴 𝑚𝑘 = 𝑸(i) + 𝛼 ⨀ 𝒉(i) 𝐻 は入力𝑜 𝑘 (𝑖)の次元数 𝐴 はヘッド数を表す
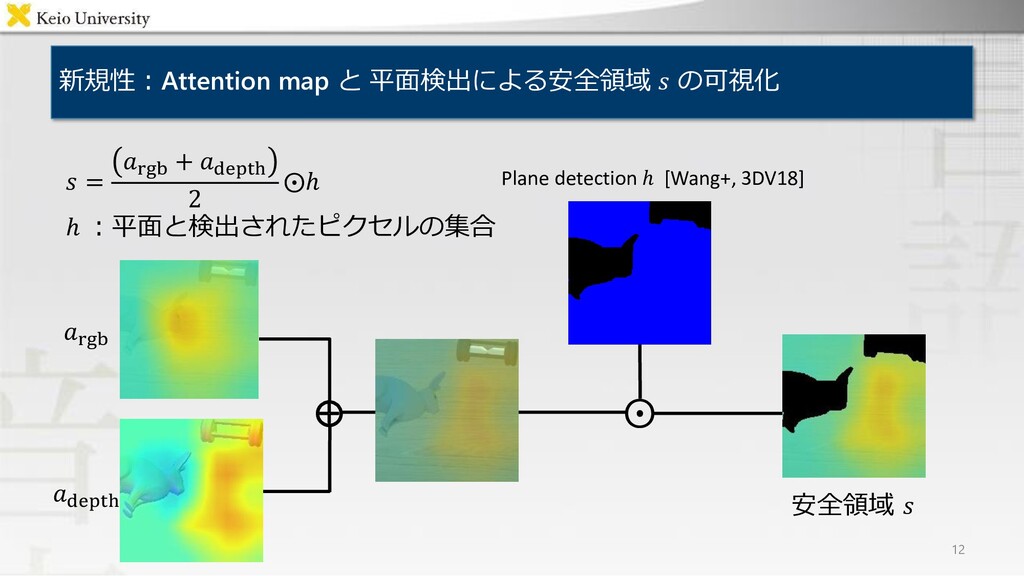
新規性:Attention map と 平面検出による安全領域 𝑠 の可視化 𝑠 = 𝑎rgb +
𝑎depth 2 ⨀ℎ ℎ :平面と検出されたピクセルの集合 ⊕ ⨀ Plane detection ℎ [Wang+, 3DV18] 安全領域 𝑠 12 𝑎rgb 𝑎depth
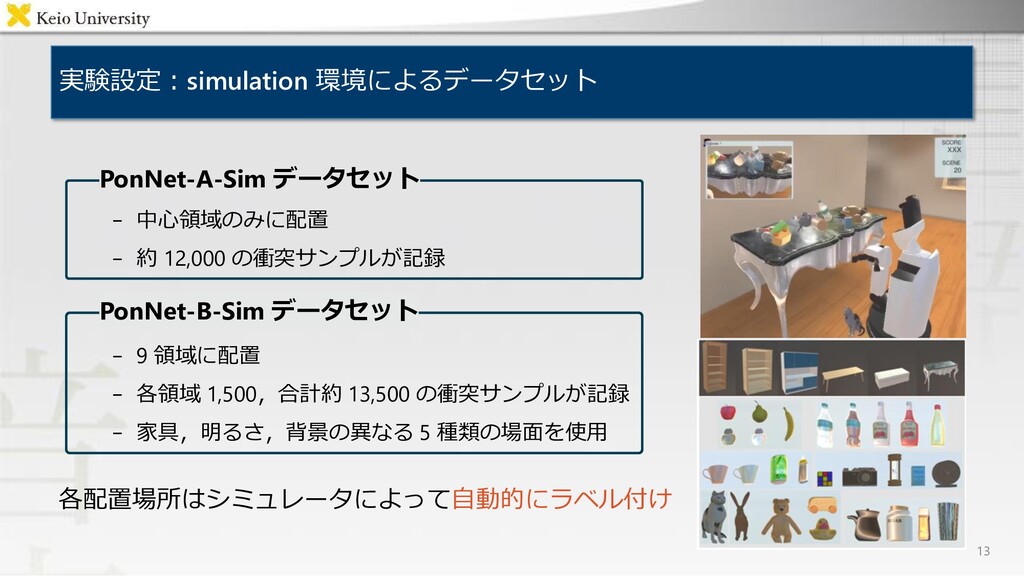
実験設定:simulation 環境によるデータセット 各配置場所はシミュレータによって自動的にラベル付け 13 PonNet-A-Sim データセット − 中心領域のみに配置 − 約
12,000 の衝突サンプルが記録 PonNet-B-Sim データセット − 9 領域に配置 − 各領域 1,500,合計約 13,500 の衝突サンプルが記録 − 家具,明るさ,背景の異なる 5 種類の場面を使用
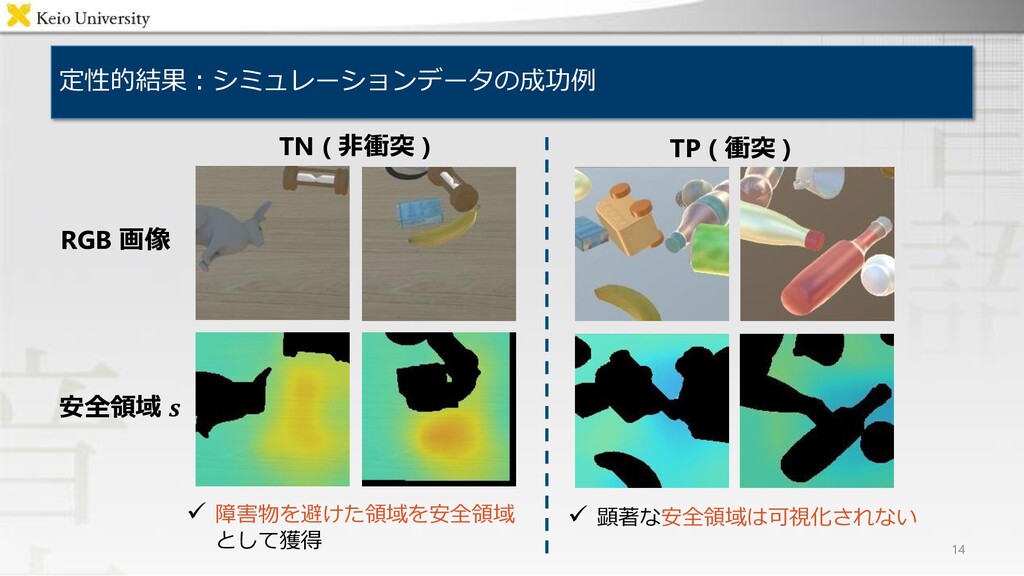
定性的結果:シミュレーションデータの成功例 ✓ 障害物を避けた領域を安全領域 として獲得 RGB 画像 安全領域 𝒔 TN (
非衝突 ) TP ( 衝突 ) 14 ✓ 顕著な安全領域は可視化されない
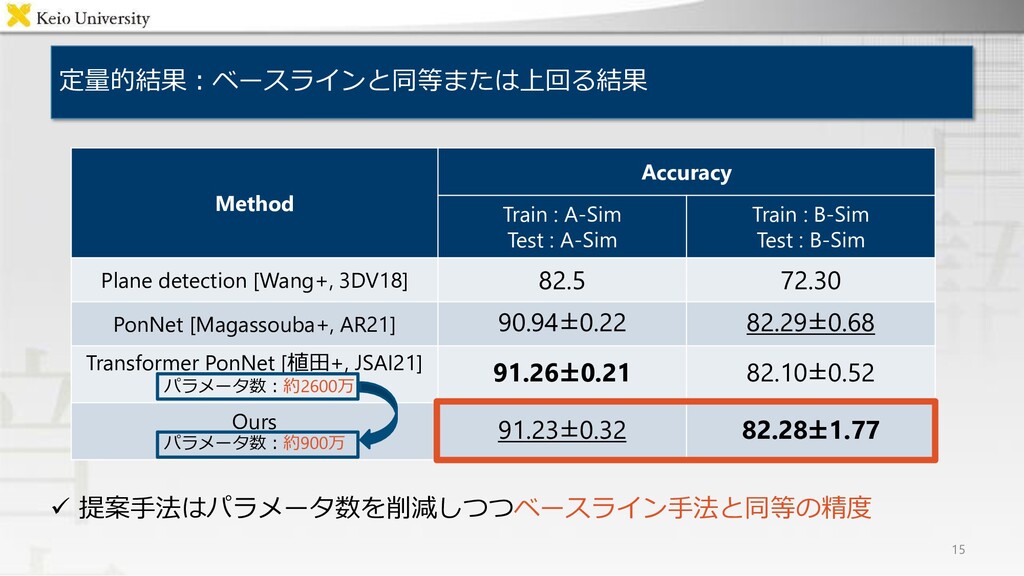
Method Accuracy Train : A-Sim Test : A-Sim Train :
B-Sim Test : B-Sim Plane detection [Wang+, 3DV18] 82.5 72.30 PonNet [Magassouba+, AR21] 90.94±0.22 82.29±0.68 Transformer PonNet [植田+, JSAI21] パラメータ数:約2600万 91.26±0.21 82.10±0.52 Ours パラメータ数:約900万 91.23±0.32 82.28±1.77 定量的結果:ベースラインと同等または上回る結果 ✓ 提案手法はパラメータ数を削減しつつベースライン手法と同等の精度 15
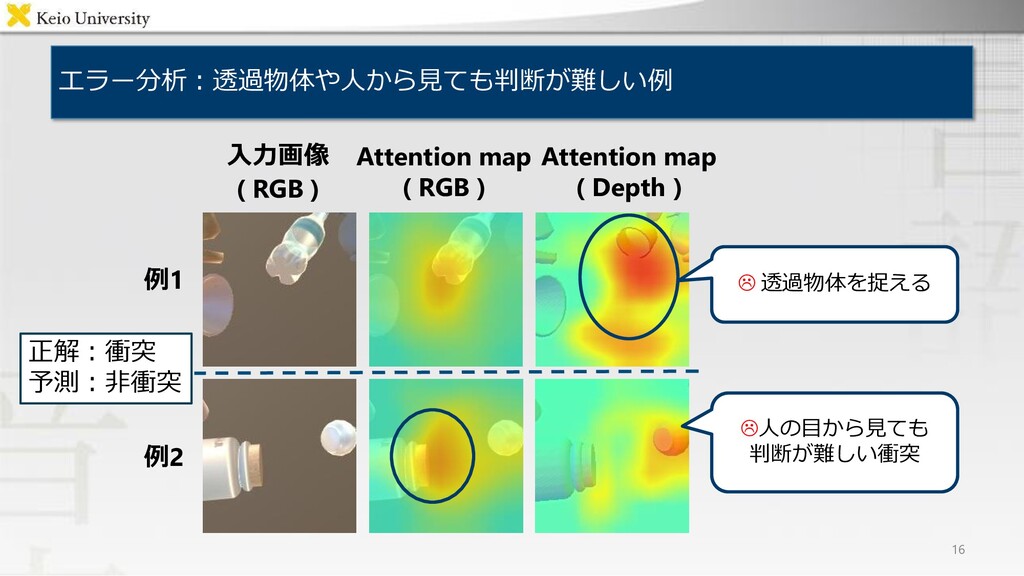
エラー分析:透過物体や人から見ても判断が難しい例 入力画像 ( RGB ) 16 Attention map ( RGB
) Attention map ( Depth ) 例1 例2 正解:衝突 予測:非衝突 透過物体を捉える 人の目から見ても 判断が難しい衝突
追加実験:実機環境によるデータ収集・実験 17 • トヨタの生活支援ロボット Human Support Robot ( HSR )
を使用 • 収集した 200 個のデータを Train / Test 用に分割 ✓ 実機環境への転用の可能性を示唆 Method Accuracy Train : A-Sim + Real ( 100 ) Test : Real ( 100 ) Ours 87.39±3.12
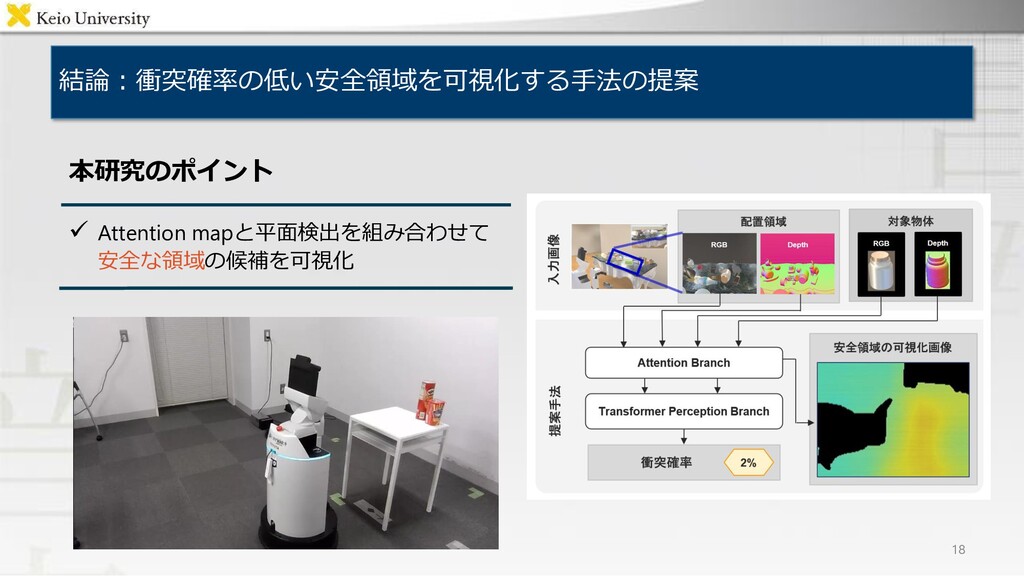
結論:衝突確率の低い安全領域を可視化する手法の提案 本研究のポイント ✓ Attention mapと平面検出を組み合わせて 安全な領域の候補を可視化 18
{kind=link}
{kind=link}
{kind=link}
![既存研究:生活支援ロボットが行うべき代表的なサブタスク 4 サブタスク 代表的研究 概要 Pick & Place [Zeng+, ICRA18]](https://files.speakerdeck.com/presentations/770fb94599bb4cdd9d2c5a5d1fe90aa5/slide_3.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}