Models Jimmy Wu1, Rika Antonova2, Adam Kan3, Marion Lepert2, Andy Zeng4, Shuran Song5, Jeannette Bohg2, Szymon Rusinkiewicz1, Thomas Funkhouser1,4 (1Princeton University, 2Stanford University, 3The Nueva School, 4Google, 5Columbia University) IROS 2023 慶應義塾大学 杉浦孔明研究室 是方諒介 Wu, J., Antonova, R., Kan, A., Lepert, M., Zeng, A., Song, S., Bohg, J., Rusinkiewicz, S., Funkhouser, T. "TidyBot: Personalized Robot Assistance with Large Language Models." IROS 2023.
{kind=link}
{kind=link}
{kind=link}
![関連研究:少数のユーザデータからパーソナライズ可能な手法は少ない 4 手法 概要 [Taniguchi+, AR21] ・片付け対象物体の場所を共起確率の分布から推定 一般的な規則を学習するため,ユーザの嗜好に特化しない NeatNet](https://files.speakerdeck.com/presentations/ec630b82822f48c6b4a4ea466fa115cf/slide_3.jpg){kind=link}
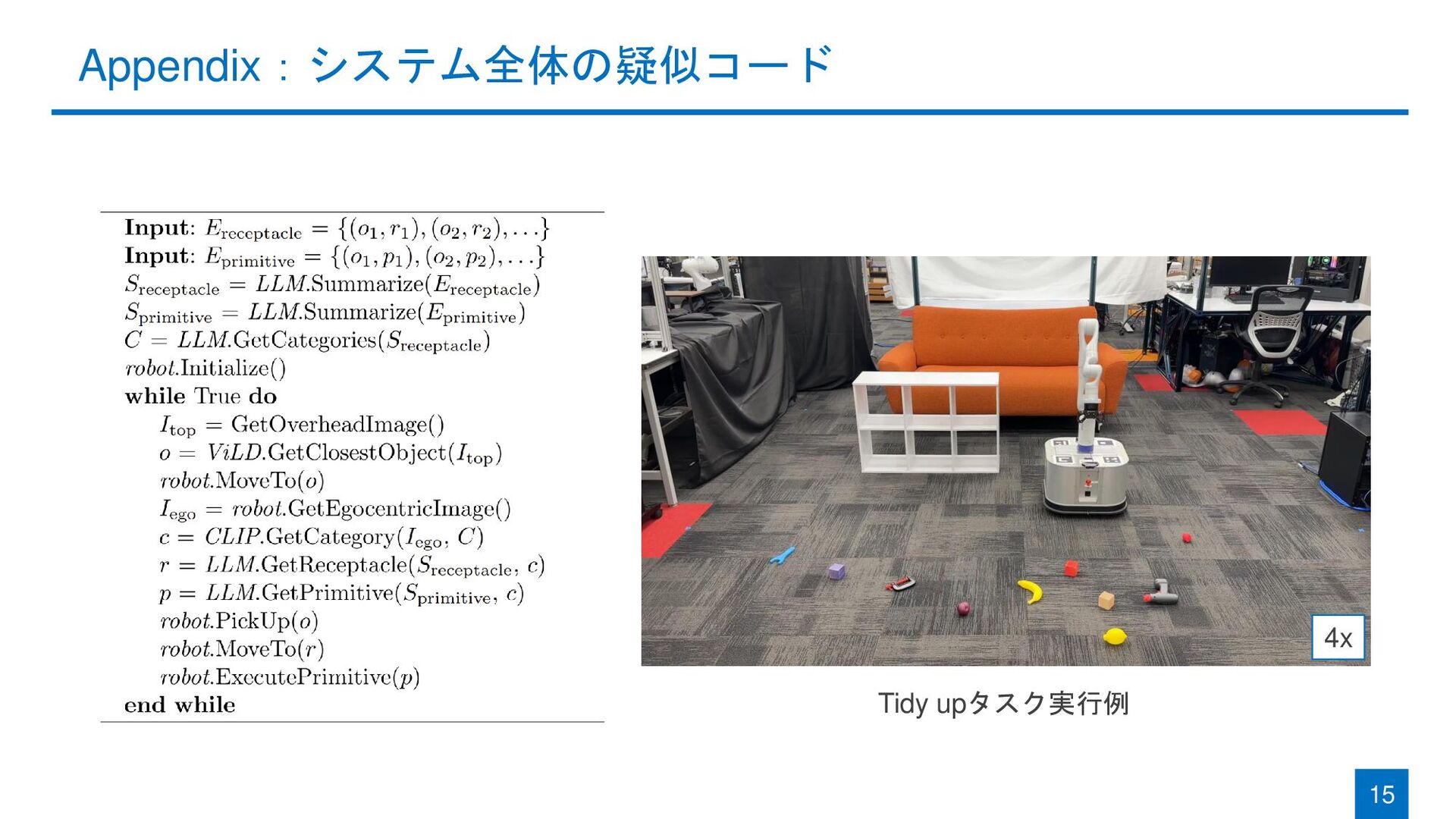
![提案手法:TidyBot ◼ LLMの要約能力を活用し,少数のユーザデータから収納場所を推定可能に ◼ システム全体の手順 1. Open-vocabularyの物体検出器 ViLD [Gu+, ICLR22]](https://files.speakerdeck.com/presentations/ec630b82822f48c6b4a4ea466fa115cf/slide_4.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
![実験設定 (1/2):言語のみから成るベンチマークデータセット ◼ タスク:未知物体の収納場所をユーザの嗜好が既知の物体から予測 ◼ 評価指標:Accuracy [%] ◼ 5パターンのユーザ傾向(物体分類則)を複合的に適用 1.](https://files.speakerdeck.com/presentations/ec630b82822f48c6b4a4ea466fa115cf/slide_8.jpg){kind=link}
![実験設定 (2/2):モバイルマニピュレータを用いた実機実験 ◼ 各シナリオにおいて,4-10例のユーザ嗜好から10個の未知物体を片付ける ◼ 評価指標:タスク成功率 [%] 10 70種類の未知物体 11種類の収納場所](https://files.speakerdeck.com/presentations/ec630b82822f48c6b4a4ea466fa115cf/slide_9.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}