Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
[JSAI22] Moment-based Adversarial Training for ...
Search
Sponsored
·
Your Podcast. Everywhere. Effortlessly.
Share. Educate. Inspire. Entertain. You do you. We'll handle the rest.
→
Semantic Machine Intelligence Lab., Keio Univ.
PRO
June 10, 2022
Technology
2.2k
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
[JSAI22] Moment-based Adversarial Training for Embodied Language Comprehension
Semantic Machine Intelligence Lab., Keio Univ.
PRO
June 10, 2022
More Decks by Semantic Machine Intelligence Lab., Keio Univ.
See All by Semantic Machine Intelligence Lab., Keio Univ.
[Journal club] Predict Before You Explore: Predictive Planning with Specialized Memory for Embodied Question Answering
keio_smilab
PRO
0
85
[Journal club] PHyCLIP: 𝒍𝟏-Product of Hyperbolic Factors Unifies Hierarchy and Compositionality in Vision-Language Representation Learning
keio_smilab
PRO
0
86
[Journal club] ReMEmbR: Building and Reasoning Over Long-Horizon Spatio-Temporal Memory for Robot Navigation
keio_smilab
PRO
0
110
[Journal club] ReLaGS: Relational Language Gaussian Splatting
keio_smilab
PRO
0
120
[Journal club] Flow as the Cross-Domain Manipulation Interface
keio_smilab
PRO
0
98
Mobi-𝜋: Mobilizing Your Robot Learning Policy
keio_smilab
PRO
0
160
A Gentle Introduction to Transformers
keio_smilab
PRO
16
7k
FlowAR: Scale-wise Autoregressive Image Generation Meets Flow Matching
keio_smilab
PRO
0
60
[Journal club] VLA-Adapter: An Effective Paradigm for Tiny-Scale Vision-Language-Action Model
keio_smilab
PRO
1
150
Other Decks in Technology
See All in Technology
大量データに対しても、生成AIを用いてリーズナブルにデータ加工をしたい!Databricksのai_queryについて調べてみた
kamoshika
1
280
データと地図で読む 大井町の「かわるもの、かわらないもの」
yoshiyama_hana
0
150
CDKで書くECSのベストプラクティス、 改めて考え直す2026 #cdkconf2026
makies
3
940
AI工学特論: MLOps・継続的評価
asei
5
1.1k
設計レビューとAIハーネスで向き合う AIが生み出した新しいボトルネックの対処法 / Design Reviews and AI Harnesses Against New Bottlenecks Created by AI
nstock
4
430
AI Coding Agent時代のcdk-nagガードレール 〜組織ルールを強制CIで守り抜く設計の挑戦〜
mhrtech
3
510
仕様駆動開発、導入半年。「本当に速くなってるの?」にデータで答える / AICon2026_hirakawa
rakus_dev
0
320
複数プロダクト組織のAIネイティブ化における戦略 / AICon2026_kude
rakus_dev
0
300
20260720_クラウド女子会×PyLadiesTokyoコラボ Amazon Bedrock ハンズオン用資料
yuuka51
1
110
どこまでAIに任せるか 〜確率論と決定論の境界決定〜
shukob
0
450
ダッシュボード"開発"について 〜使われるダッシュボードのつくりかた〜
kimichan
0
200
文字起こし基盤の信頼性
abnoumaru
0
120
Featured
See All Featured
SERP Conf. Vienna - Web Accessibility: Optimizing for Inclusivity and SEO
sarafernandez
2
1.5k
Large-scale JavaScript Application Architecture
addyosmani
515
110k
Agile Leadership in an Agile Organization
kimpetersen
PRO
0
190
How STYLIGHT went responsive
nonsquared
100
6.2k
How Fast Is Fast Enough? [PerfNow 2025]
tammyeverts
3
660
Navigating Weather and Climate Data
rabernat
0
400
The Mindset for Success: Future Career Progression
greggifford
PRO
0
430
Dominate Local Search Results - an insider guide to GBP, reviews, and Local SEO
greggifford
PRO
0
210
Skip the Path - Find Your Career Trail
mkilby
1
170
Docker and Python
trallard
47
4k
Information Architects: The Missing Link in Design Systems
soysaucechin
0
1k
Accessibility Awareness
sabderemane
1
160
Transcript
Vision-and-Language Navigationタスクにおける 敵対的サブゴール⽣成 慶應義塾⼤学 ⽯川慎太朗,杉浦孔明
背景︓⾃律エージェントによる⽣活⽀援への期待 2 [Toyota Research Institute/YouTube] Vision-and-Language Navigation (VLN) - 3次元環境において、⾃然⾔語命令をもとにエージェントがタスクを実⾏
- 本研究の⽬標︓家庭環境において、⽣活⽀援タスクを実⾏するエージェントの構築 社会課題 - ⽇常⽣活における⽀援・介助の必要性 - 在宅介助者の不⾜ ⼈間の発する命令⽂をもとに、 ⽣活⽀援タスクを実⾏できれば便利
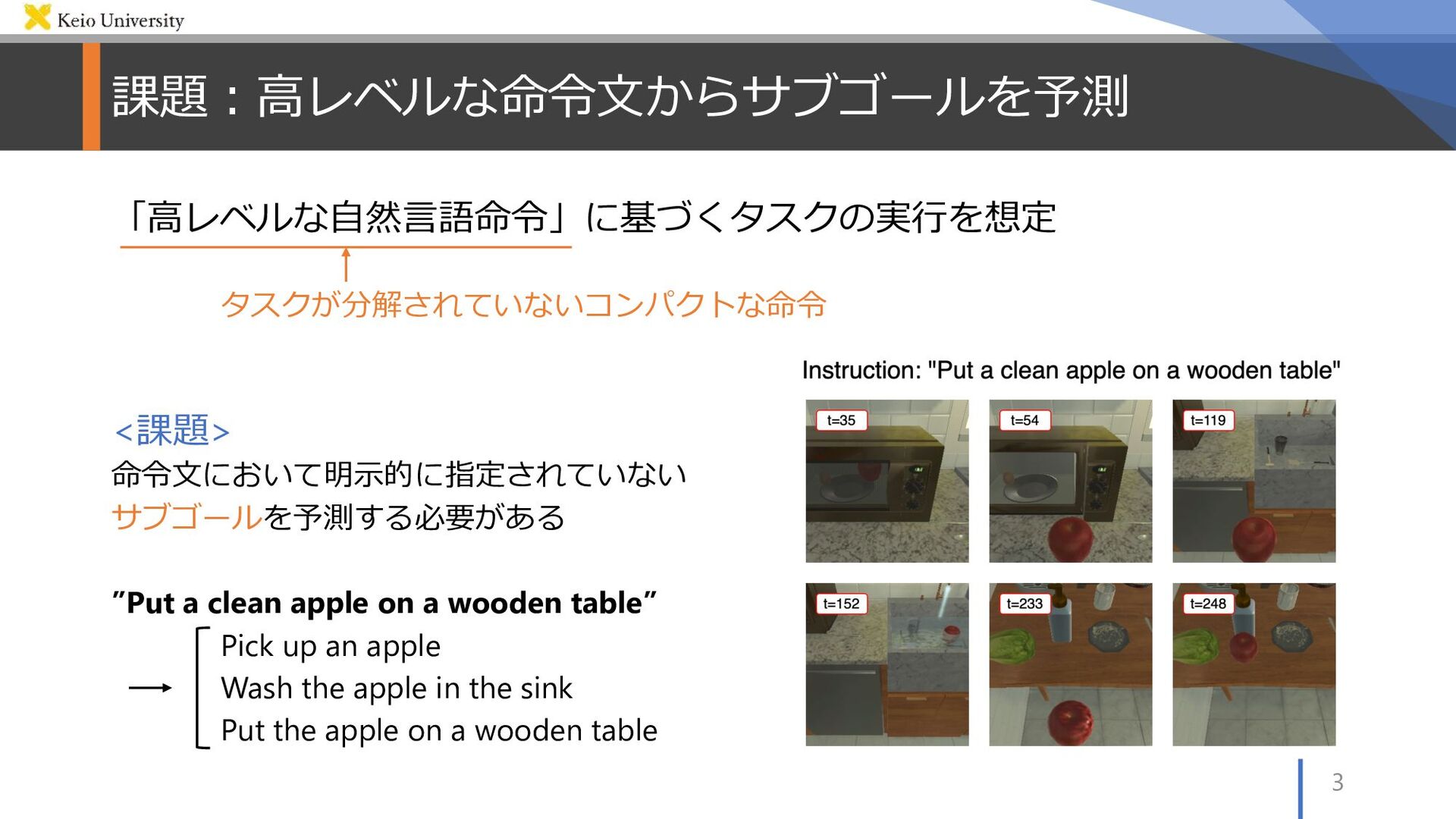
「⾼レベルな⾃然⾔語命令」に基づくタスクの実⾏を想定 タスクが分解されていないコンパクトな命令 <課題> 命令⽂において明⽰的に指定されていない サブゴールを予測する必要がある ”Put a clean apple on
a wooden table” Pick up an apple Wash the apple in the sink Put the apple on a wooden table 課題︓⾼レベルな命令⽂からサブゴールを予測 3
関連研究︓既存⼿法は性能⾯で不⼗分 4 Model Description MOCA [Singh+, ICCV’21] • Visual Perception
Module: 対象物体のマスクを⽣成 • Action Policy Module: 次の⾏動を予測 Episodic Transformer [Pashevich+, ICCV’21] • Transformerのエンコーダを使⽤したモデル • 命令⽂、過去の観測画像群、⾏動系列をもとに、次の⾏動を予測 Episodic Transformer MOCA
関連研究︓HLSM 5 Hierarchical Language-conditioned Spatial Model (HLSM) [Bulkis+, CoRL’21] -
観測データから構築した状態表現を⻑期記憶として利⽤ - ⻑期的なタスクを実⾏する階層的なアプローチ High-level controller • ⼊⼒ - 命令⽂ - 過去のサブゴール群 - 状態表現 • 出⼒ - 現在のサブゴール
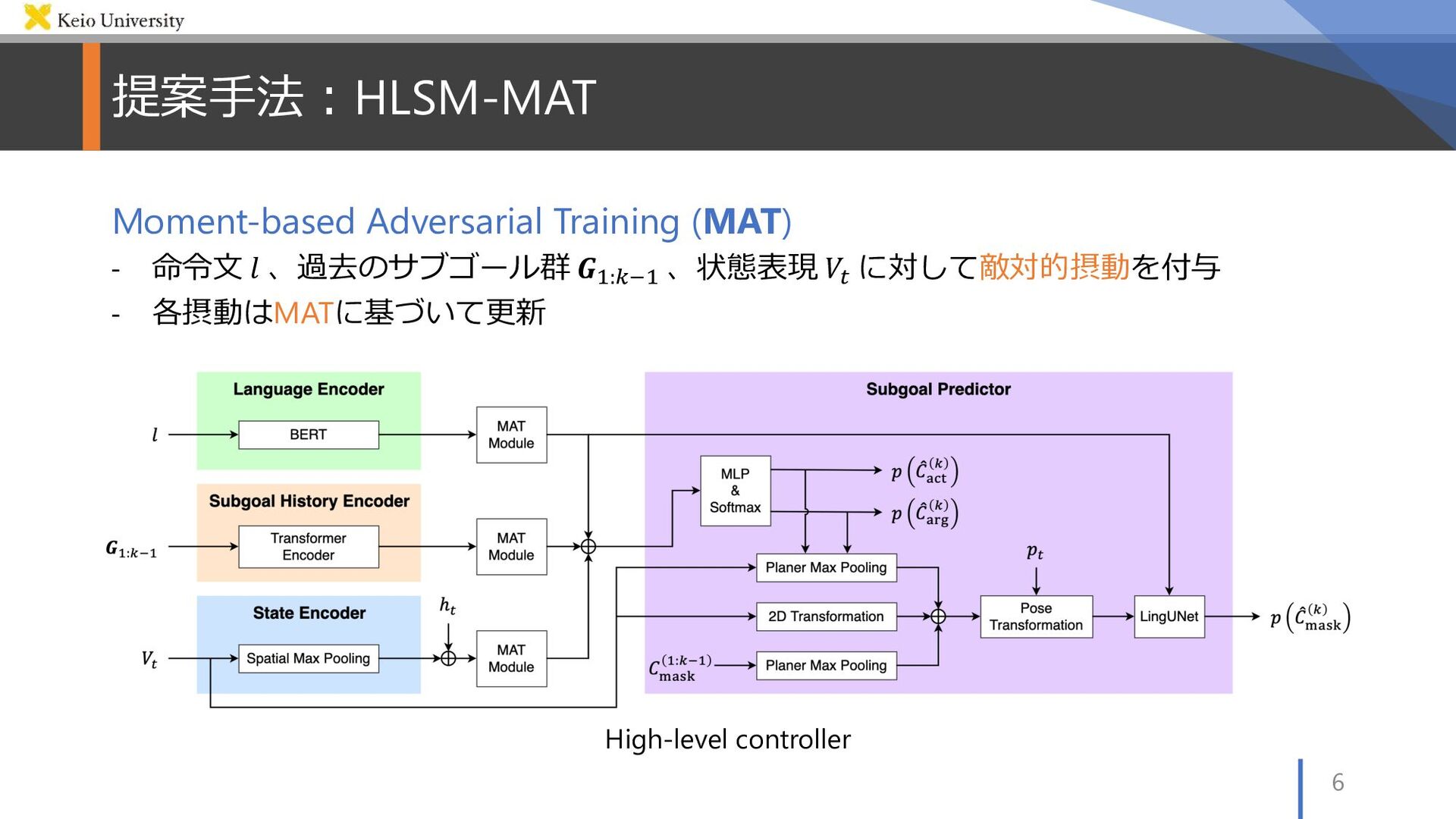
提案⼿法︓HLSM-MAT 6 Moment-based Adversarial Training (MAT) - 命令⽂ 𝑙 、過去のサブゴール群
𝑮!:#$! 、状態表現 𝑉% に対して敵対的摂動を付与 - 各摂動はMATに基づいて更新 High-level controller
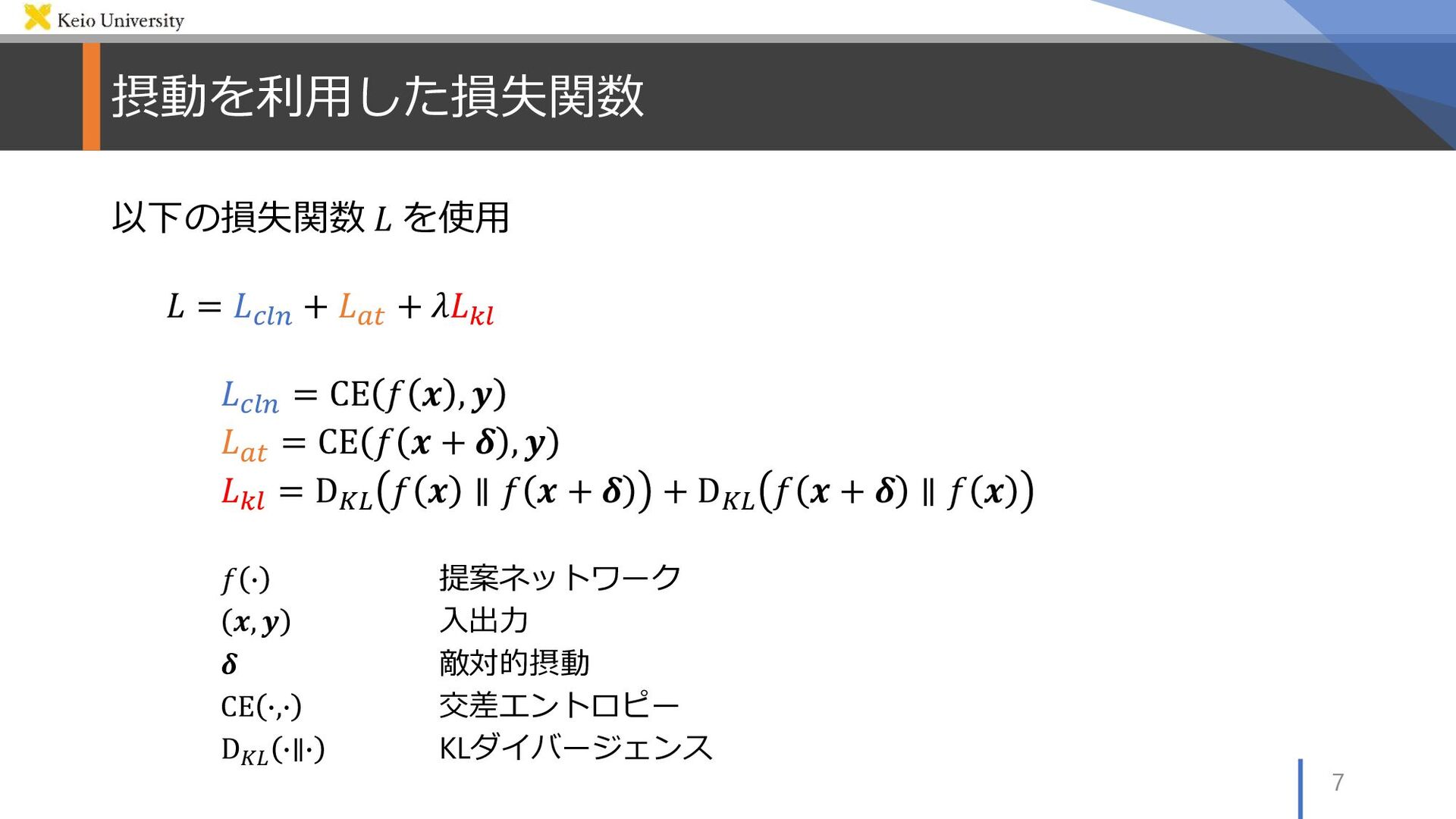
摂動を利⽤した損失関数 7 以下の損失関数 𝐿 を使⽤ 𝐿 = 𝐿!"# + 𝐿$%
+ 𝜆𝐿&" 𝐿!"# = CE 𝑓 𝒙 , 𝒚 𝐿$% = CE 𝑓 𝒙 + 𝜹 , 𝒚 𝐿&" = D'( 𝑓 𝒙 ∥ 𝑓 𝒙 + 𝜹 + D'( 𝑓 𝒙 + 𝜹 ∥ 𝑓 𝒙 𝑓 % 提案ネットワーク 𝒙, 𝒚 ⼊出⼒ 𝜹 敵対的摂動 CE %,% 交差エントロピー D&' %∥% KLダイバージェンス
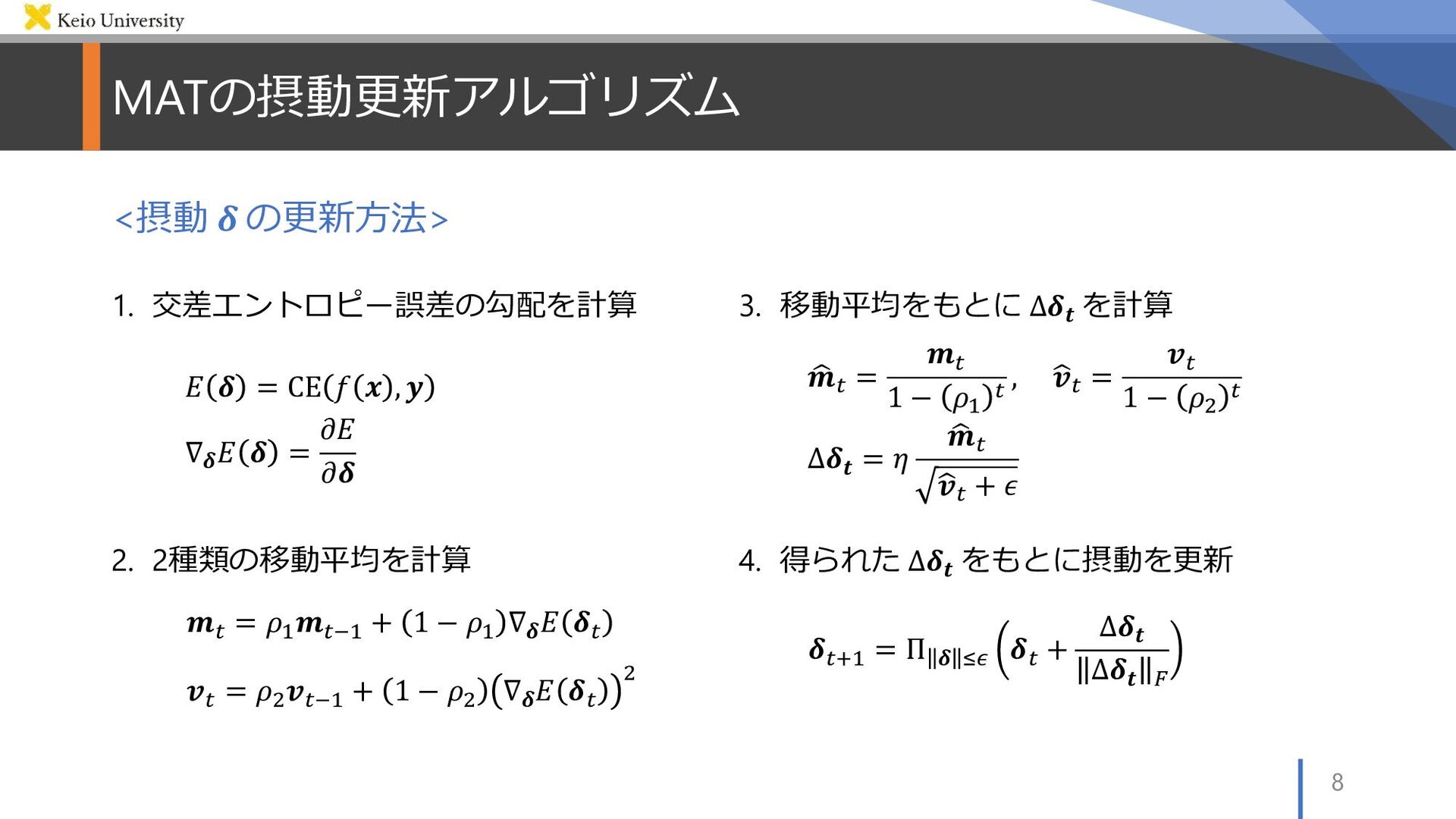
MATの摂動更新アルゴリズム 8 1. 交差エントロピー誤差の勾配を計算 2. 2種類の移動平均を計算 𝐸 𝜹 = CE
𝑓 𝒙 , 𝒚 ∇𝜹𝐸 𝜹 = 𝜕𝐸 𝜕𝜹 𝒎% = 𝜌!𝒎%$! + 1 − 𝜌! ∇𝜹𝐸 𝜹% 𝒗% = 𝜌)𝒗%$! + 1 − 𝜌) ∇𝜹𝐸 𝜹% ) 3. 移動平均をもとに ∆𝜹𝒕 を計算 4. 得られた ∆𝜹𝒕 をもとに摂動を更新 9 𝒎% = 𝒎% 1 − 𝜌! % , 9 𝒗% = 𝒗% 1 − 𝜌) % ∆𝜹𝒕 = 𝜂 9 𝒎% 9 𝒗% + 𝜖 𝜹%+! = Π 𝜹 ,- 𝜹% + ∆𝜹𝒕 ∆𝜹𝒕 . <摂動 𝜹 の更新⽅法>
実験︓HLSM-MATの性能評価 9 データセット︓ALFRED [Shridher+, CVPR’20] - AI2-THOR [Kolve+, 17] 環境における、VLNモデルの評価を⽬的としたベンチマーク
- 「⾼/低レベルな⾃然⾔語指⽰⽂」と「デモンストレーション」から構成 - cf. ALFRED Challenge @ CVPR 2021 Embodied AI Workshop [mohito1905/YouTube]
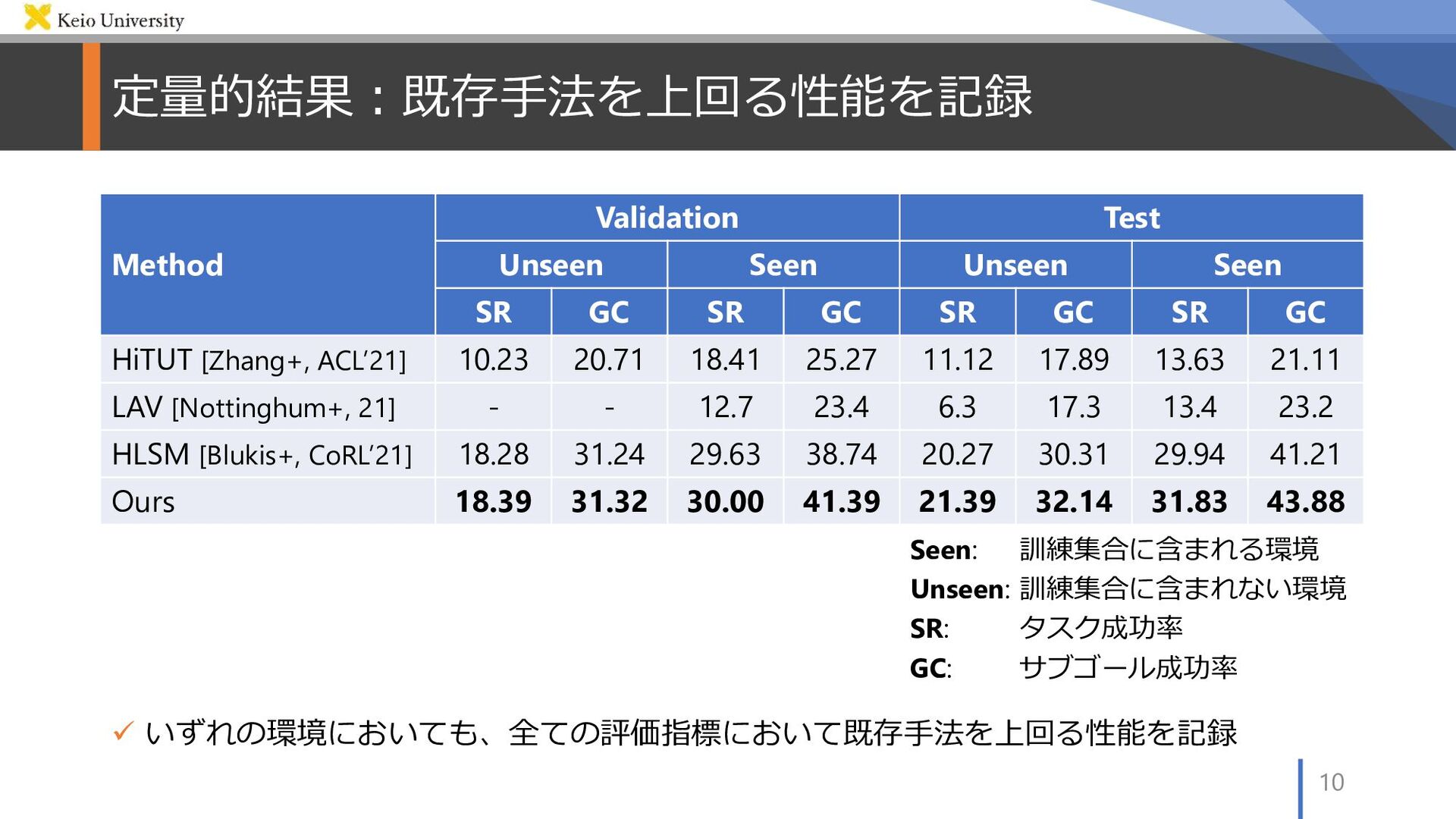
定量的結果︓既存⼿法を上回る性能を記録 10 Method Validation Test Unseen Seen Unseen Seen SR
GC SR GC SR GC SR GC HiTUT [Zhang+, ACL’21] 10.23 20.71 18.41 25.27 11.12 17.89 13.63 21.11 LAV [Nottinghum+, 21] - - 12.7 23.4 6.3 17.3 13.4 23.2 HLSM [Blukis+, CoRL’21] 18.28 31.24 29.63 38.74 20.27 30.31 29.94 41.21 Ours 18.39 31.32 30.00 41.39 21.39 32.14 31.83 43.88 Seen: 訓練集合に含まれる環境 Unseen: 訓練集合に含まれない環境 SR: タスク成功率 GC: サブゴール成功率 ü いずれの環境においても、全ての評価指標において既存⼿法を上回る性能を記録
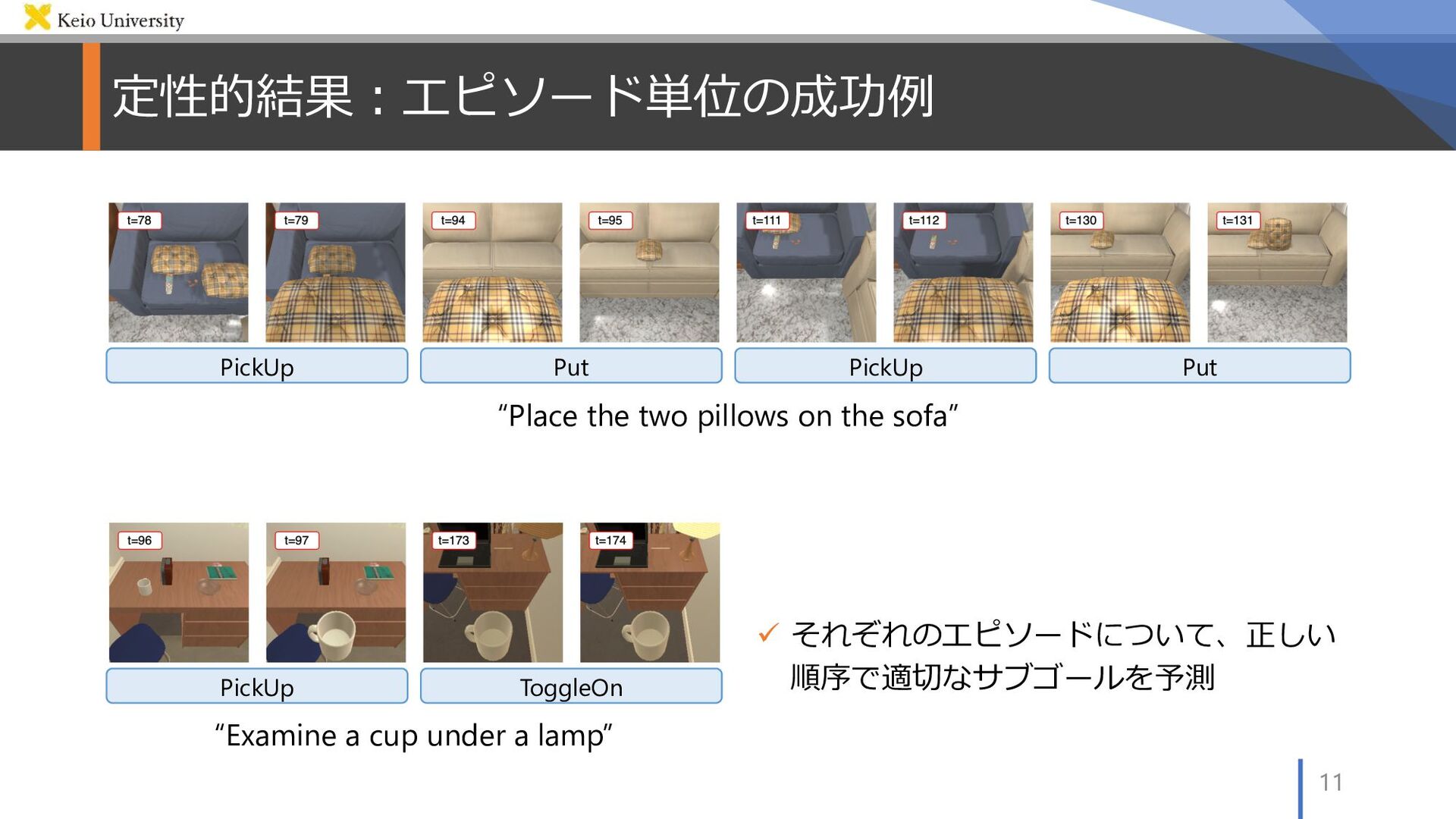
定性的結果︓エピソード単位の成功例 11 “Place the two pillows on the sofa” “Examine
a cup under a lamp” ü それぞれのエピソードについて、正しい 順序で適切なサブゴールを予測 PickUp Put PickUp Put PickUp ToggleOn
定性的結果︓エピソード単位の失敗例 12 “Put a cooled potato inside the microwave” [t=0-86]
じゃがいもを⼿にした後、冷蔵庫に⼊れて冷やすことに成功 [t=101-102] 冷やしたじゃがいもを再び把持しなければならないところ、誤って別の じゃがいもを把持してしまい失敗 PickUp Open Put Close Open PickUp Close Open Put Close
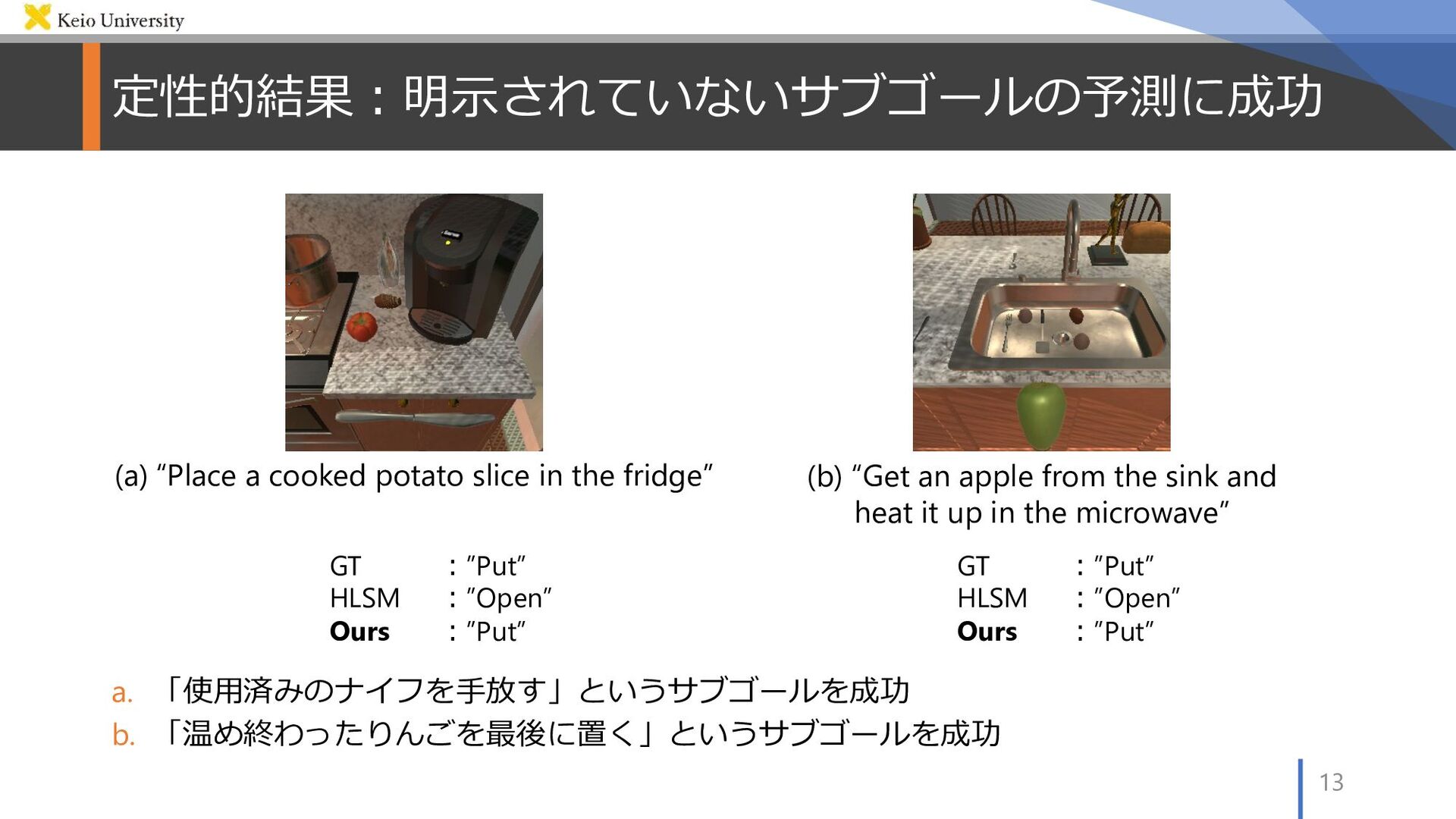
定性的結果︓明⽰されていないサブゴールの予測に成功 13 (a) “Place a cooked potato slice in the
fridge” (b) “Get an apple from the sink and heat it up in the microwave” a. 「使⽤済みのナイフを⼿放す」というサブゴールを成功 b. 「温め終わったりんごを最後に置く」というサブゴールを成功 GT ︓”Put” HLSM ︓”Open” Ours ︓”Put” GT ︓”Put” HLSM ︓”Open” Ours ︓”Put”
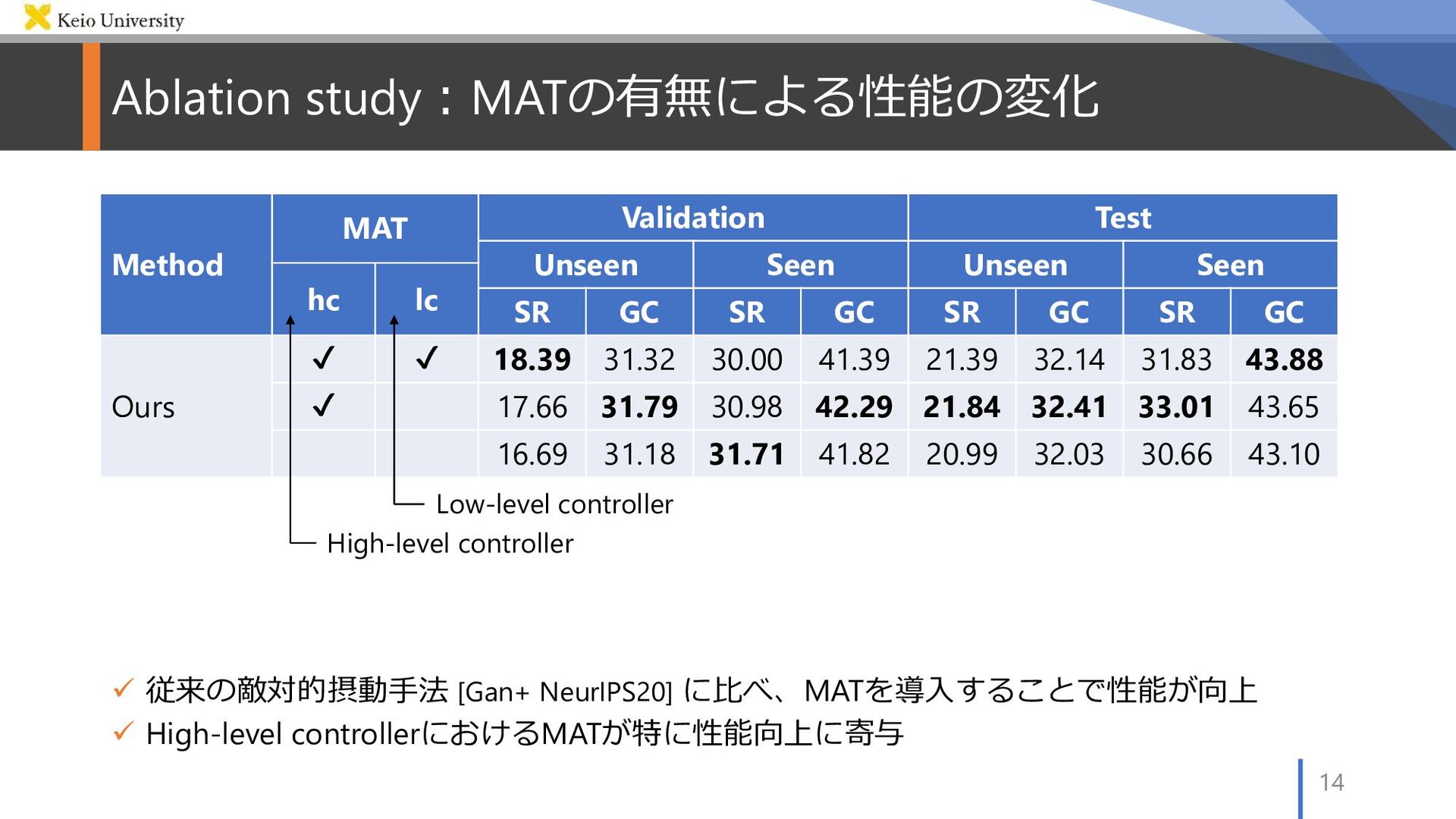
Method MAT Validation Test Unseen Seen Unseen Seen hc lc
SR GC SR GC SR GC SR GC Ours ✔ ✔ 18.39 31.32 30.00 41.39 21.39 32.14 31.83 43.88 ✔ 17.66 31.79 30.98 42.29 21.84 32.41 33.01 43.65 16.69 31.18 31.71 41.82 20.99 32.03 30.66 43.10 Ablation study︓MATの有無による性能の変化 14 ü 従来の敵対的摂動⼿法 [Gan+ NeurIPS20] に⽐べ、MATを導⼊することで性能が向上 ü High-level controllerにおけるMATが特に性能向上に寄与 Low-level controller High-level controller
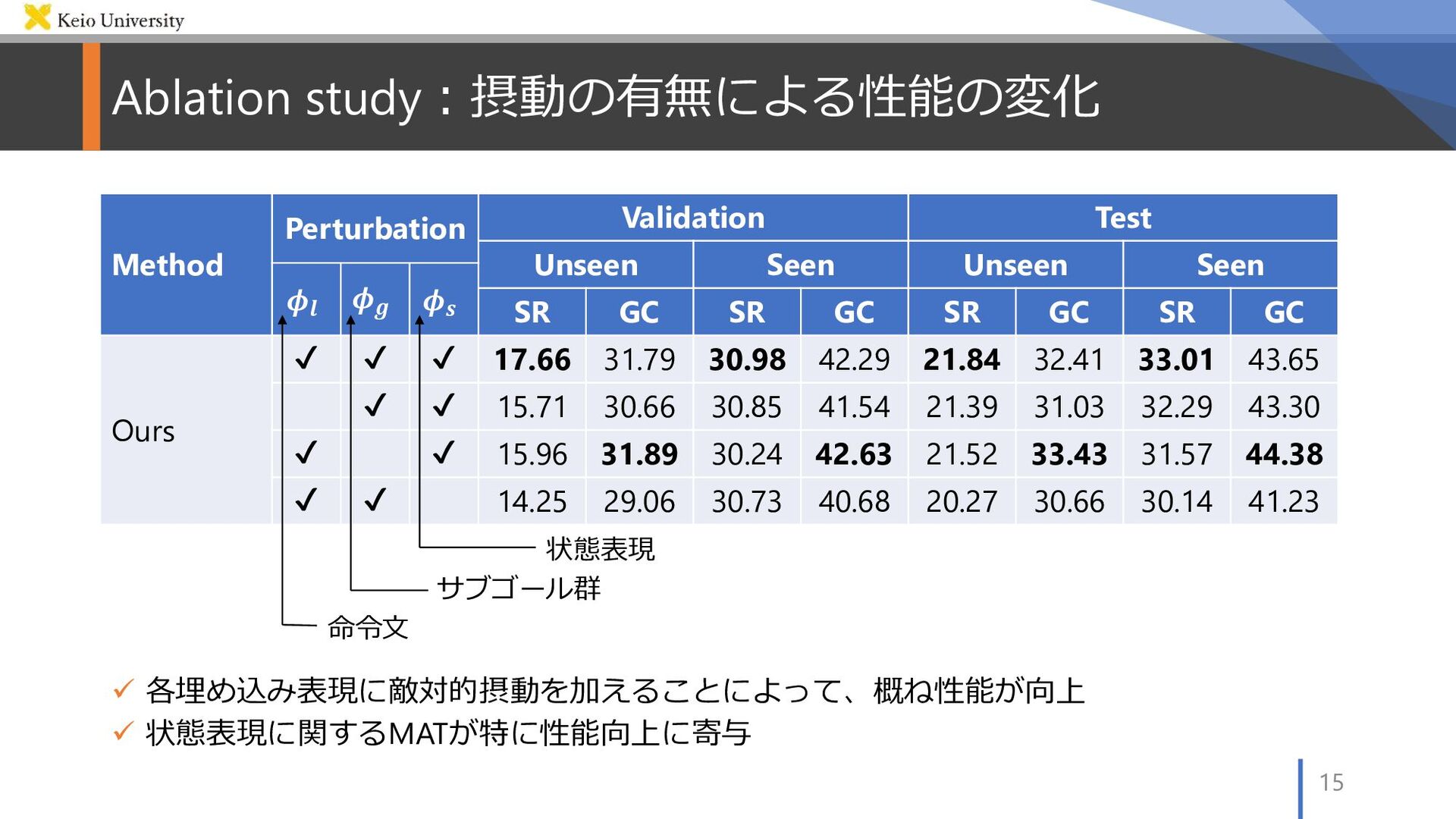
Method Perturbation Validation Test Unseen Seen Unseen Seen 𝝓𝒍 𝝓𝒈
𝝓𝒔 SR GC SR GC SR GC SR GC Ours ✔ ✔ ✔ 17.66 31.79 30.98 42.29 21.84 32.41 33.01 43.65 ✔ ✔ 15.71 30.66 30.85 41.54 21.39 31.03 32.29 43.30 ✔ ✔ 15.96 31.89 30.24 42.63 21.52 33.43 31.57 44.38 ✔ ✔ 14.25 29.06 30.73 40.68 20.27 30.66 30.14 41.23 Ablation study︓摂動の有無による性能の変化 15 ü 各埋め込み表現に敵対的摂動を加えることによって、概ね性能が向上 ü 状態表現に関するMATが特に性能向上に寄与 状態表現 サブゴール群 命令⽂
まとめ 16 ü VLNにおける階層的なアプローチに敵対的学習を導⼊ ü 命令⽂、過去のサブゴール群、状態表現に対して、敵対的摂動を付与 ü 新たな摂動更新アルゴリズムMATを提案 ü ALFREDベンチマークにおいて、既存⼿法を上回る性能を記録
{kind=link}
![背景︓⾃律エージェントによる⽣活⽀援への期待 2 [Toyota Research Institute/YouTube] Vision-and-Language Navigation (VLN) - 3次元環境において、⾃然⾔語命令をもとにエージェントがタスクを実⾏](https://files.speakerdeck.com/presentations/135e230885204dc9b845d073010ec364/slide_1.jpg){kind=link}
{kind=link}
![関連研究︓既存⼿法は性能⾯で不⼗分 4 Model Description MOCA [Singh+, ICCV’21] • Visual Perception](https://files.speakerdeck.com/presentations/135e230885204dc9b845d073010ec364/slide_3.jpg){kind=link}
![関連研究︓HLSM 5 Hierarchical Language-conditioned Spatial Model (HLSM) [Bulkis+, CoRL’21] -](https://files.speakerdeck.com/presentations/135e230885204dc9b845d073010ec364/slide_4.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
![実験︓HLSM-MATの性能評価 9 データセット︓ALFRED [Shridher+, CVPR’20] - AI2-THOR [Kolve+, 17] 環境における、VLNモデルの評価を⽬的としたベンチマーク](https://files.speakerdeck.com/presentations/135e230885204dc9b845d073010ec364/slide_8.jpg){kind=link}
{kind=link}
{kind=link}
![定性的結果︓エピソード単位の失敗例 12 “Put a cooled potato inside the microwave” [t=0-86]](https://files.speakerdeck.com/presentations/135e230885204dc9b845d073010ec364/slide_11.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}