falls off the shelf because it is pushed away by the robot” • 生活支援ロボットによる物体配置タスクにお ける,危険性についての説明文が付与 • 計1000サンプル • 89のレシピ,2K本の動画 • 調理ステップごとに分割,説明文が付与 • 計12Kサンプル “Grill the tomatoes in a pan and then put them on a plate”
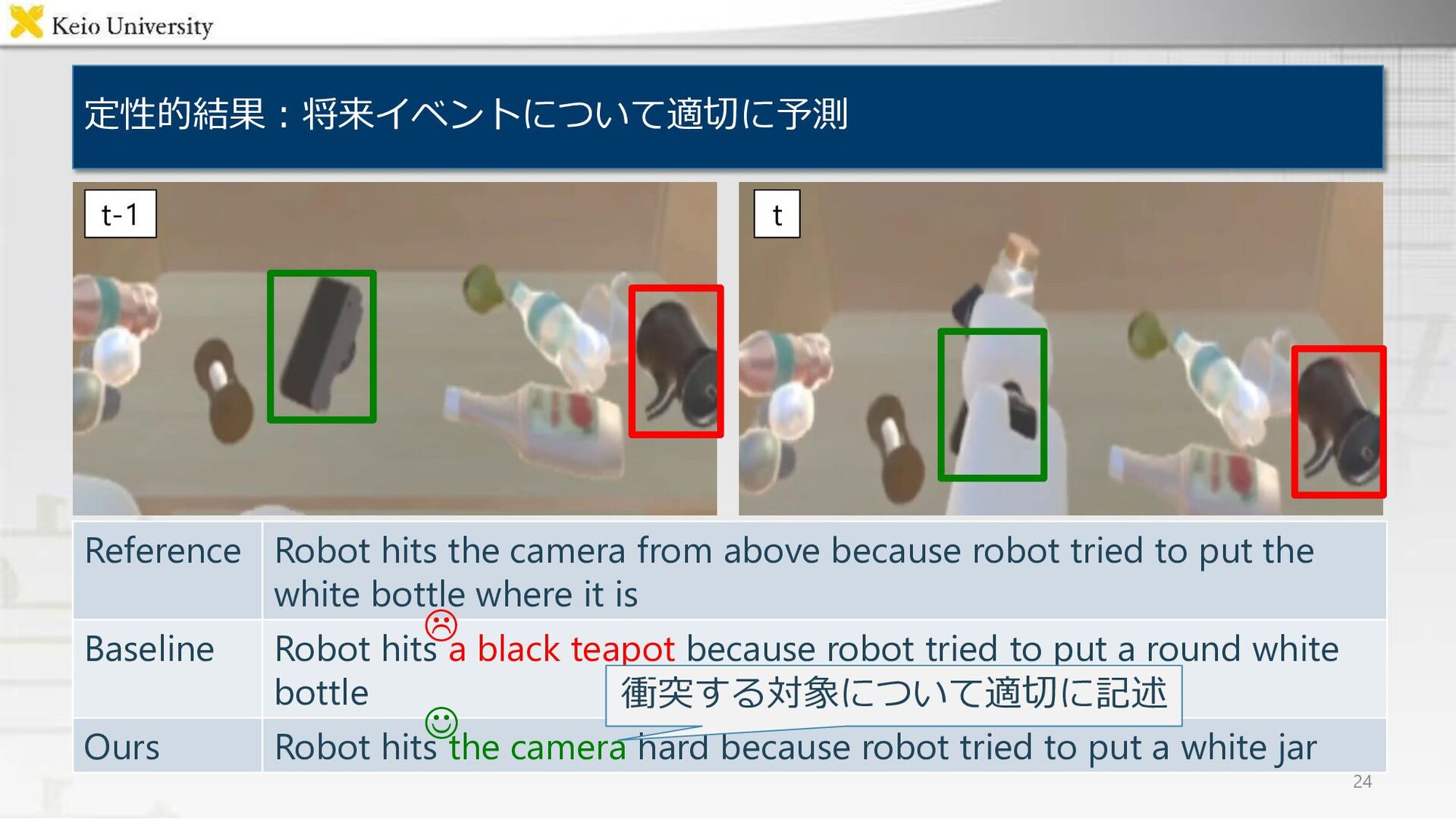
robot tried to put the white bottle where it is Baseline Robot hits a black teapot because robot tried to put a round white bottle Ours Robot hits the camera hard because robot tried to put a white jar ☺ 衝突する対象について適切に記述 t-1 t
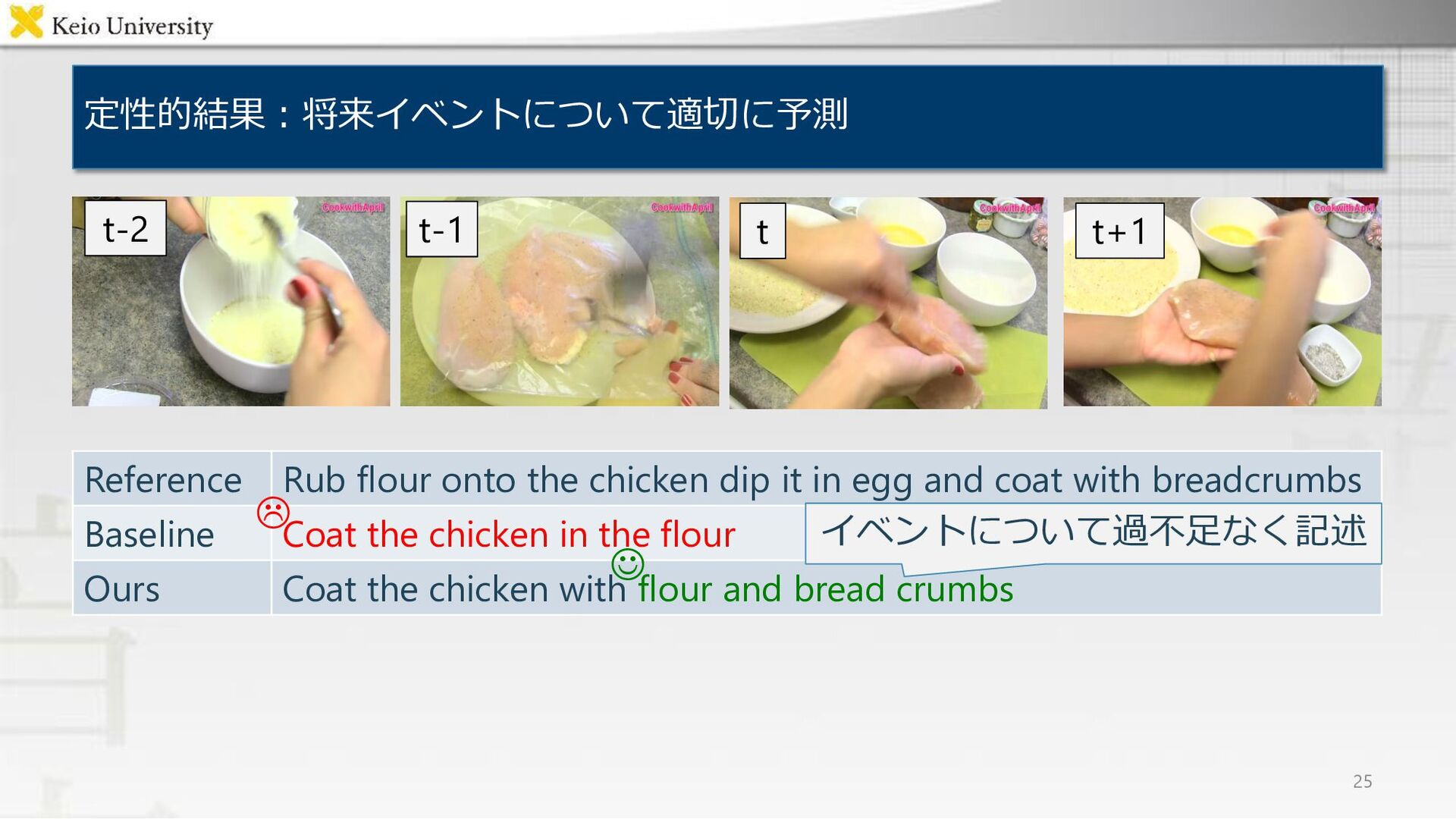
in egg and coat with breadcrumbs Baseline Coat the chicken in the flour Ours Coat the chicken with flour and bread crumbs ☺ イベントについて過不足なく記述 t-2 t-1 t t+1
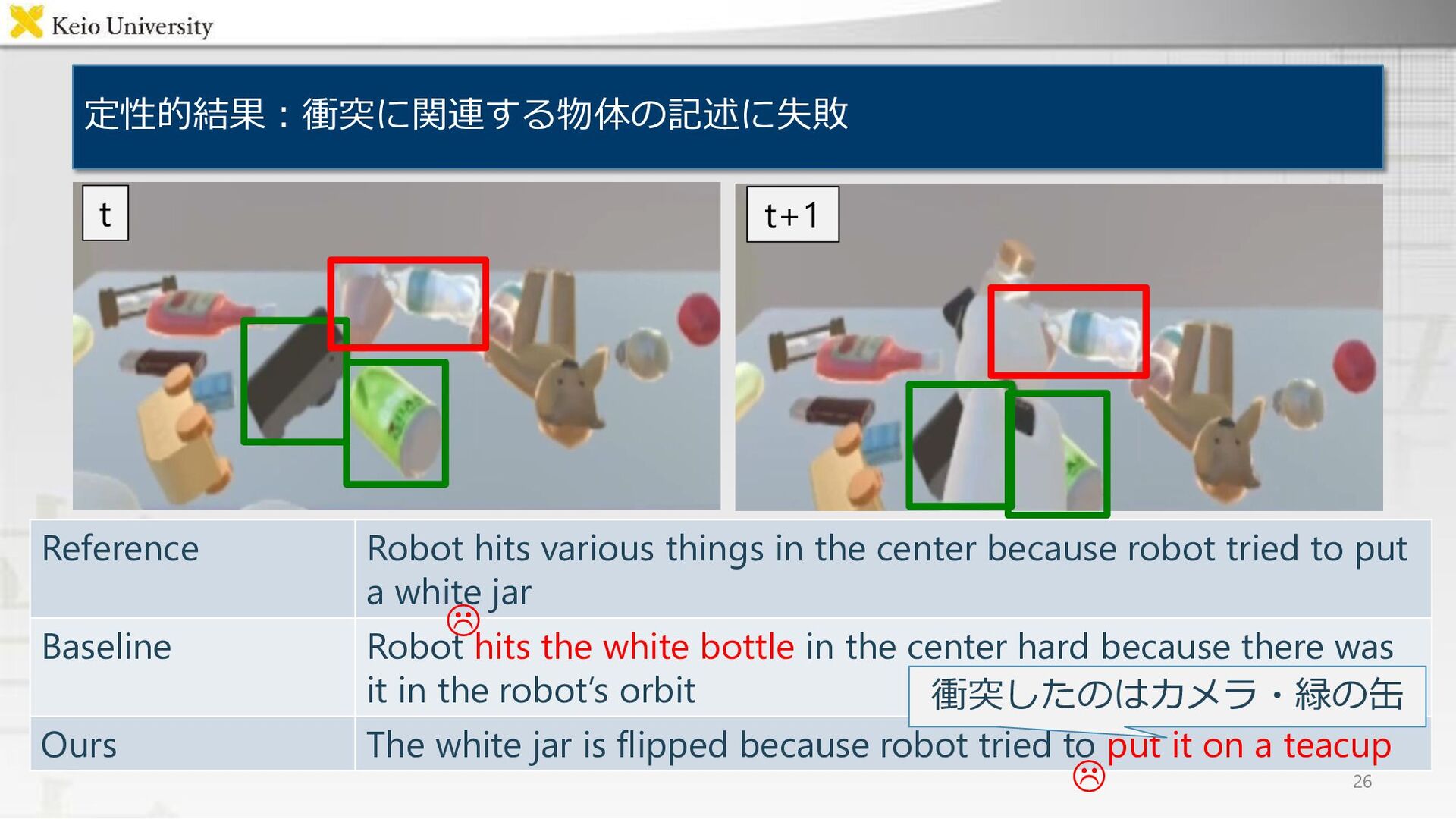
because robot tried to put a white jar Baseline Robot hits the white bottle in the center hard because there was it in the robot’s orbit Ours The white jar is flipped because robot tried to put it on a teacup 衝突したのはカメラ・緑の缶 t t+1
and season generously with mixed spices Baseline Cut the chicken into small pieces Ours Place the chicken pieces in a bowl 時刻tについての記述となっている t-1 t t+1
{kind=link}
{kind=link}
{kind=link}
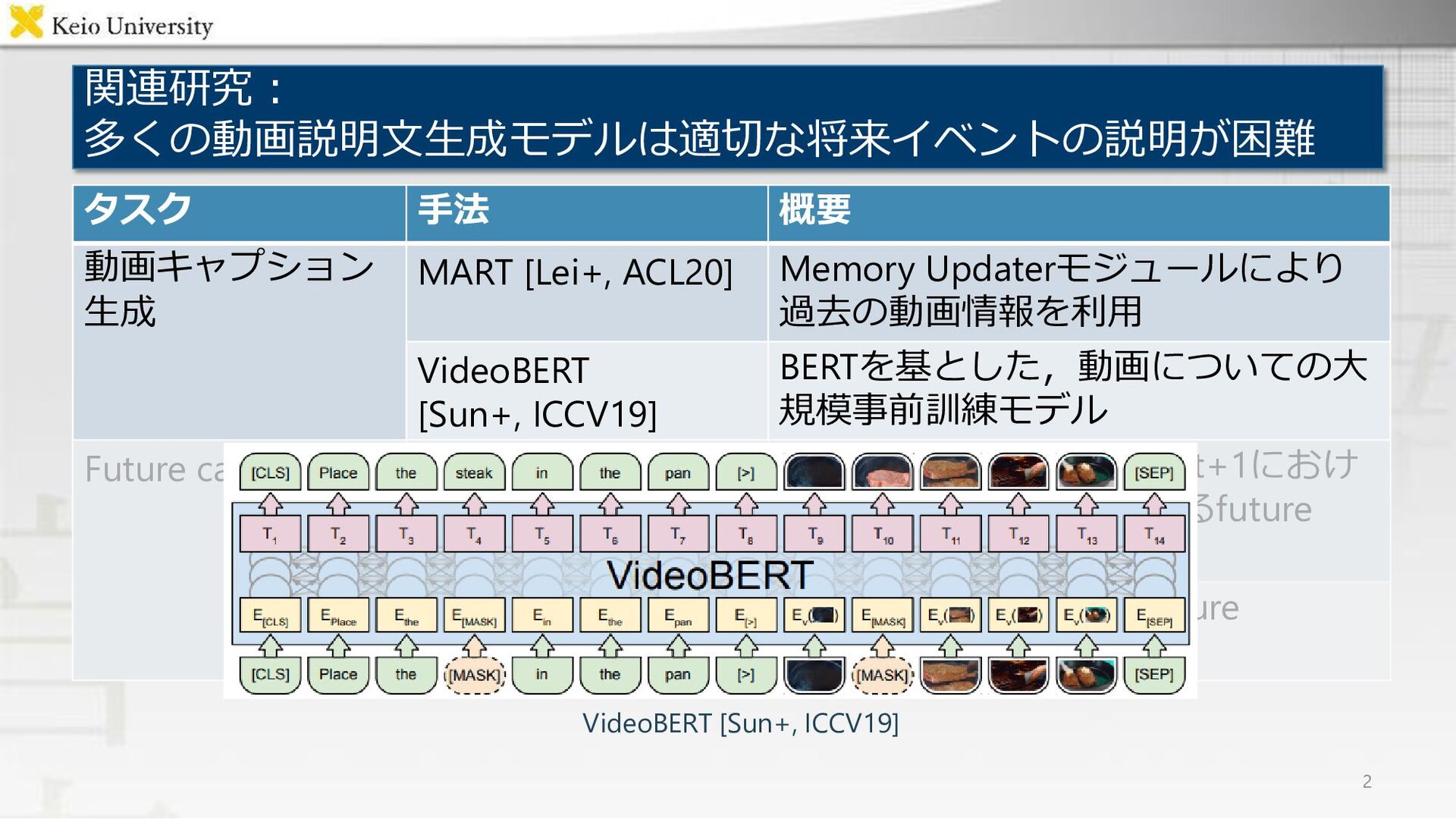
![MART [Lei+, ACL20]: Memory Updaterモジュールによる過去情報利用 3 • 時刻t-1までのmemory,時刻tの情報か らmemoryを更新するMemory Updater](https://files.speakerdeck.com/presentations/1a5053e512044295981d29d3b45c4cdc/slide_3.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![実験設定 19 YouCookⅡ[Zhou+, AAAI18] データセット BILA-caption データセット “The rabbit figurine](https://files.speakerdeck.com/presentations/1a5053e512044295981d29d3b45c4cdc/slide_19.jpg){kind=link}
{kind=link}
{kind=link}
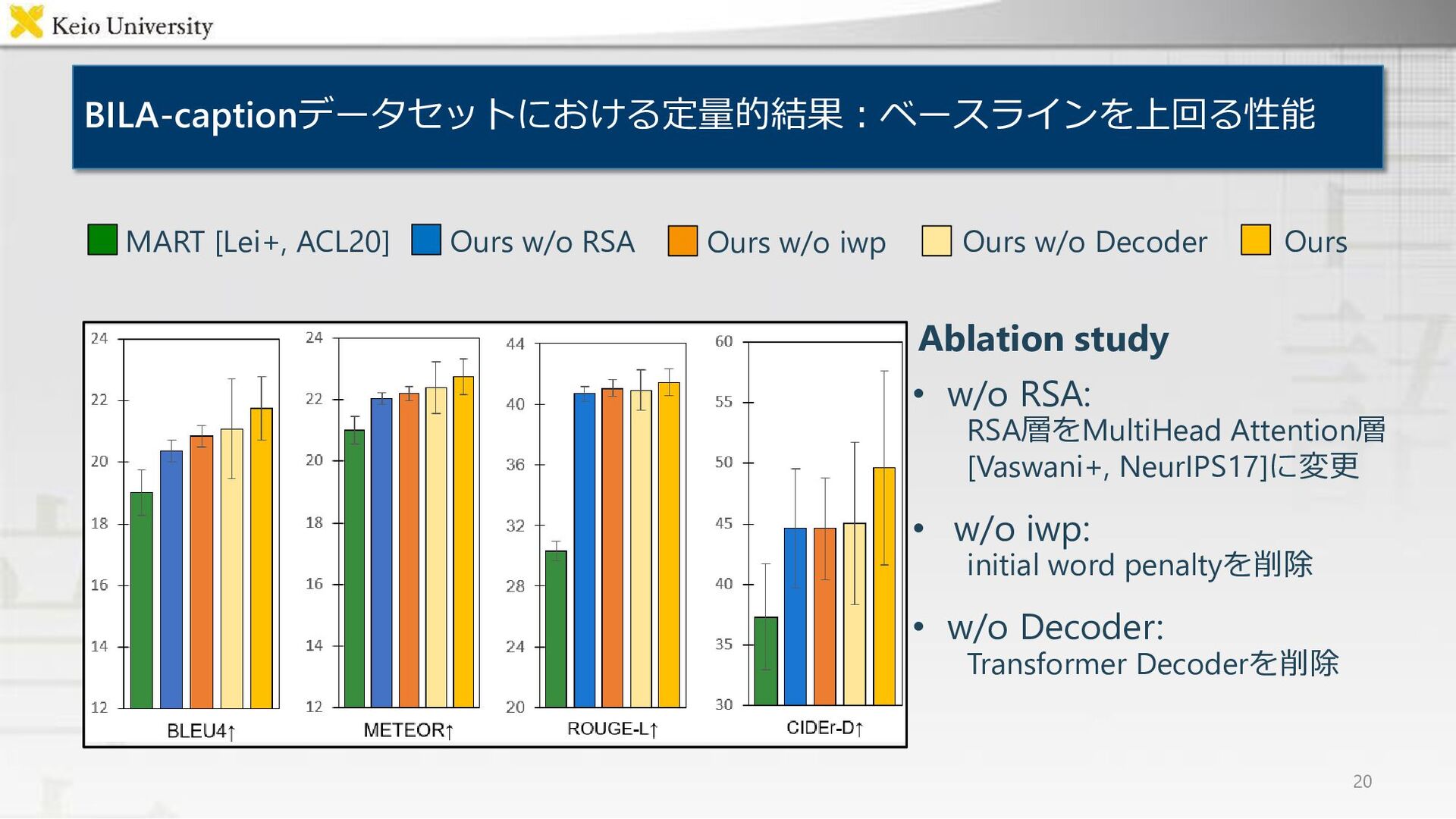
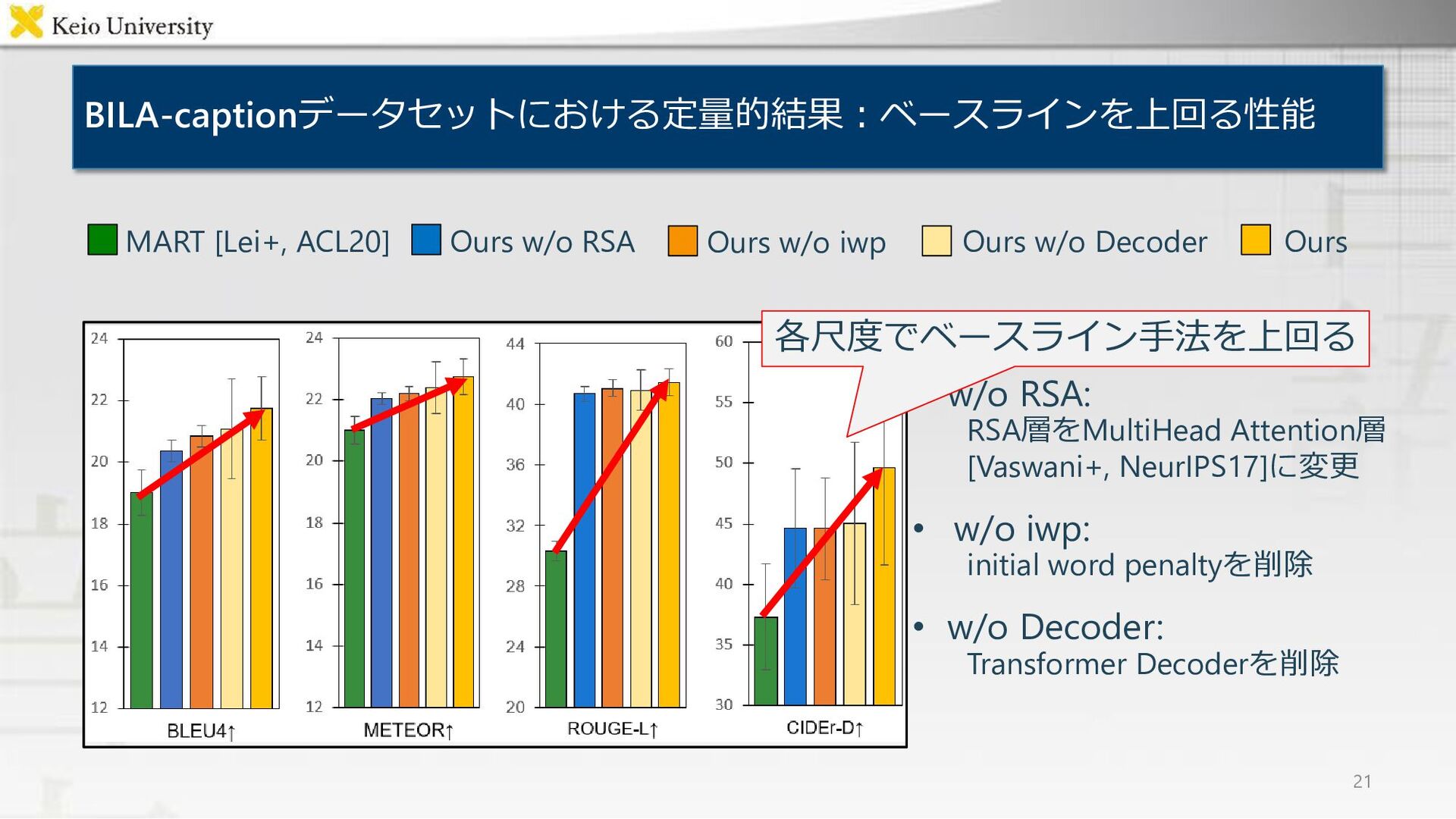
![YouCook2データセットにおける定量的結果:同様に多くの評価尺度で上回る 22 • w/o RSA: RSA層をMultiHead Attention層 [Vaswani+, NeurIPS17]に変更 •](https://files.speakerdeck.com/presentations/1a5053e512044295981d29d3b45c4cdc/slide_22.jpg){kind=link}
![YouCook2データセットにおける定量的結果:同様に多くの評価尺度で上回る 23 • w/o RSA: RSA層をMultiHead Attention層 [Vaswani+, NeurIPS17]に変更 •](https://files.speakerdeck.com/presentations/1a5053e512044295981d29d3b45c4cdc/slide_23.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}