Share
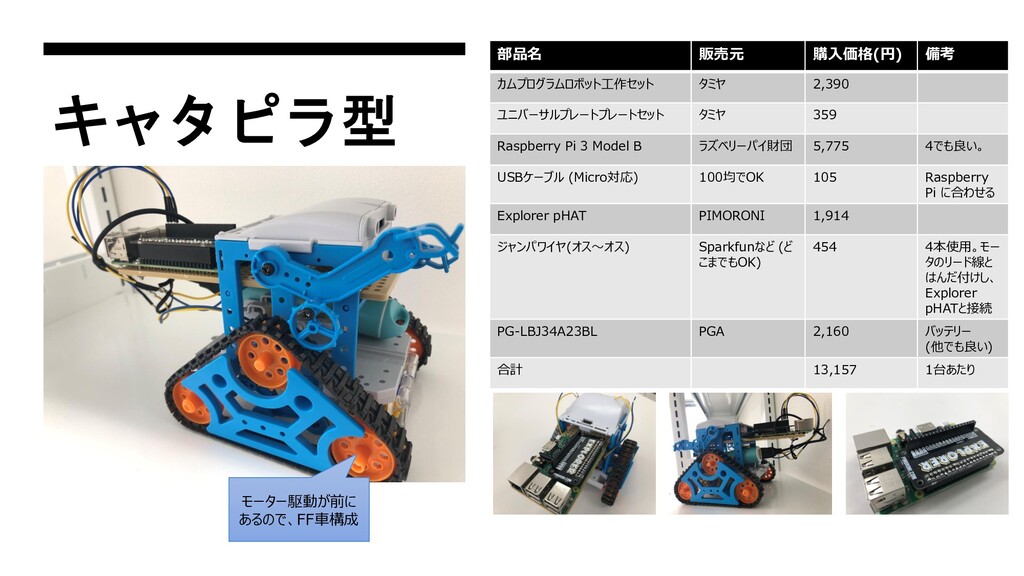
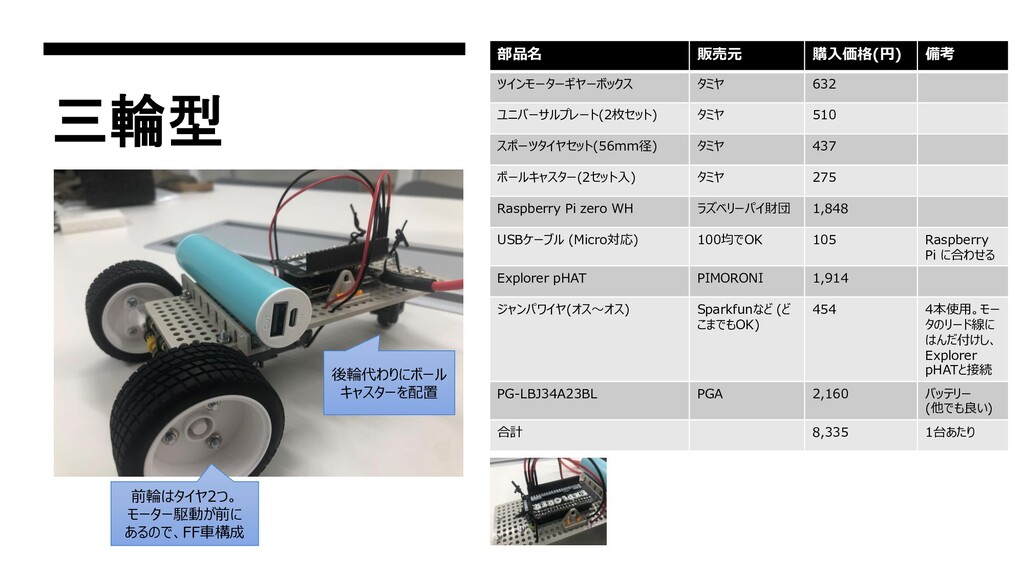
日本では飛行するタイプのドローンを自由に飛ばすことが出来ないこと、自作しようとすると高額になりがち。そこで、地上を走らせるタイプで、Rasberry Pi など手に入り易い市販品で構成したドローンの試作結果をシェアします。
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}