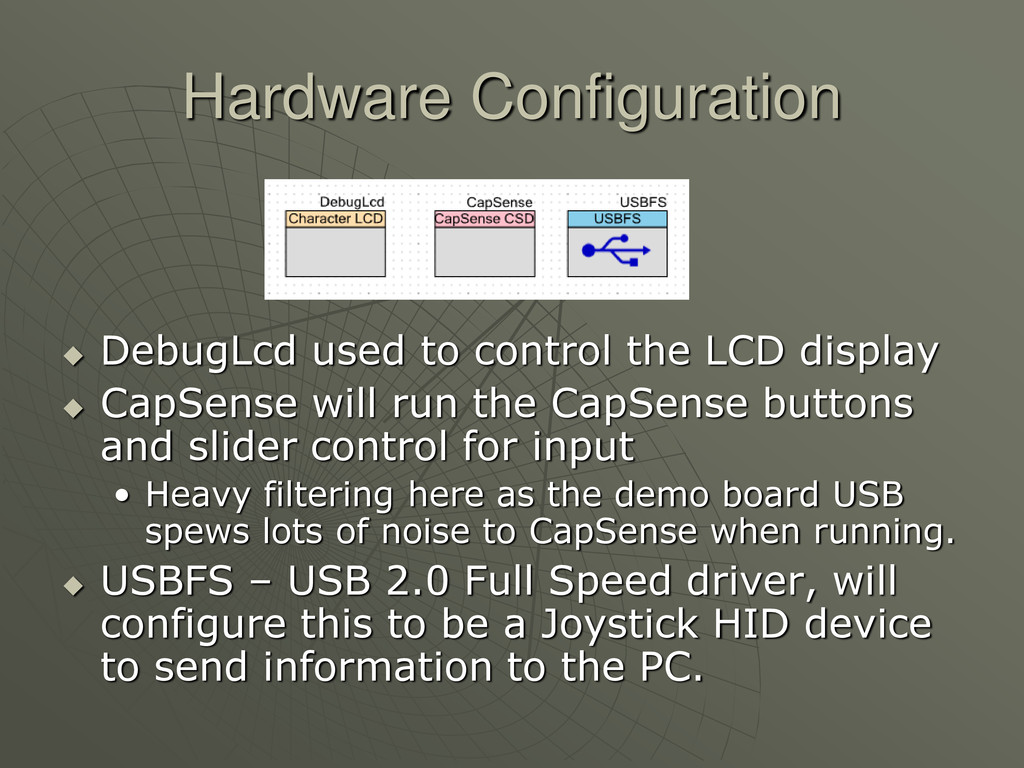
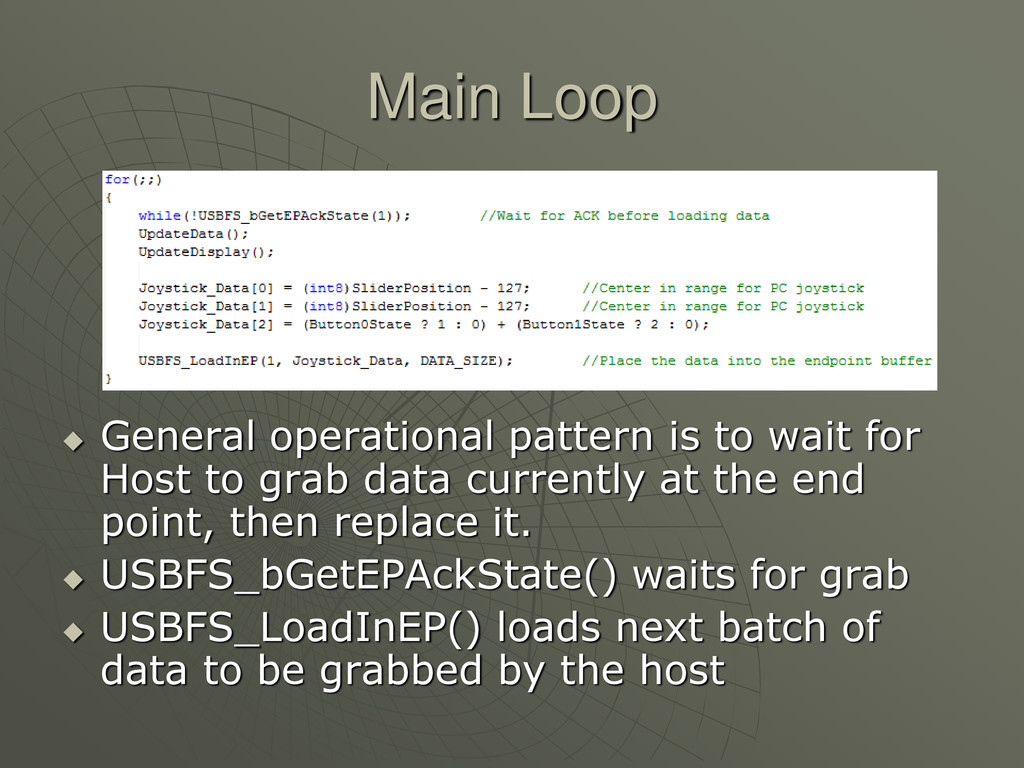
This talk will cover the USB fundamental needed to implement as USB HID joystick device using the Cypress PSoC 5 processor. The concepts covered by the talk are common to USB communications in general and can be used with other processors as well as implementing other types of devices.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}