Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
GR-ROSEとROSを使ってコマンドサーボの現在位置をWebブラウザで表示してみる
Search
Sponsored
·
Ship Features Fearlessly
Turn features on and off without deploys. Used by thousands of Ruby developers.
→
lutecia16v
July 17, 2021
Programming
1.7k
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
GR-ROSEとROSを使ってコマンドサーボの現在位置をWebブラウザで表示してみる
2021/7/17 ROS Japan UG #43 組み込み勉強会 LT資料
lutecia16v
July 17, 2021
More Decks by lutecia16v
See All by lutecia16v
EDF-IDF Programming Guidを読む - JTAG Debugging 編 -
lutecia16v
1
400
GR-ROSEでROS/ROS2
lutecia16v
1
1.9k
Jetson NanoとGR-ROSEで始めるROS2
lutecia16v
0
2.3k
がじぇねるねでもROSしたい!
lutecia16v
1
160
GR-ROSE でroombaをコントロールする
lutecia16v
2
420
Other Decks in Programming
See All in Programming
技術記事、 専門家としてのプログラマ、 言語化
mizchi
14
7.5k
【やさしく解説 設計編 #1】「ドメイン駆動」と「実装駆動」ってなに? 〜設計の考え方を、たとえ話で学ぼう〜
panda728
PRO
1
120
AIを活用したE2Eテスト実装効率化のあゆみ / ebisu-mobile-14-kotetu
kotetuco
0
170
『コードを書く以外の』エンジニアリング〜課金基盤移行プロジェクト推進のためのTips4選
yuriko1211
0
500
PHP に部分適用が来るぞ!……ところで何それ?おいしいの? #phpcon / phpcon-2026
shogogg
0
210
フィードバックで育てるAI開発
kotaminato
1
120
地域 SRE コミュニティ最前線 - ホンマでっかSRE勉強会
tk3fftk
0
230
任せる範囲はこう広がった / How the Scope of AI Delegation Has Expanded
nrslib
1
260
광주소프트웨어마이스터고등학교 DevFest 특강 - 바이브 코딩 시대에서 주니어 개발자로 살아남는 방법
utilforever
1
130
型も通る、synthも通る、それでも危ない 〜AIのCDKの権限とコストを機械で検証する〜 / It Passes Type Checks, It Passes Synth Checks, but It’s Still Risky — Automatically Verifying Permissions and Costs in AI’s CDK —
seike460
PRO
1
320
LaravelLive Japan の裏方のすべて — 第188回 PHP勉強会@東京 (2026-06-24)
suguruooki
2
150
Claude Opus 4.6以後の受託開発エンジニアの変化(Claude Code開発ノウハウ大公開スペシャルbyクラスメソッド)
iidatakuma
1
760
Featured
See All Featured
Leading Effective Engineering Teams in the AI Era
addyosmani
9
2.1k
Building a A Zero-Code AI SEO Workflow
portentint
PRO
0
630
WCS-LA-2024
lcolladotor
0
710
Noah Learner - AI + Me: how we built a GSC Bulk Export data pipeline
techseoconnect
PRO
0
220
Let's Do A Bunch of Simple Stuff to Make Websites Faster
chriscoyier
508
140k
Introduction to Domain-Driven Design and Collaborative software design
baasie
1
900
How Software Deployment tools have changed in the past 20 years
geshan
0
34k
Bootstrapping a Software Product
garrettdimon
PRO
307
120k
エンジニアに許された特別な時間の終わり
watany
108
250k
BBQ
matthewcrist
89
10k
Conquering PDFs: document understanding beyond plain text
inesmontani
PRO
4
2.9k
Claude Code どこまでも/ Claude Code Everywhere
nwiizo
65
56k
Transcript
GR-ROSEとROSを使って コマンドサーボの現在位置を Webブラウザで表示してみる るぅて(@lutecia16v) 2021/7/17 ROS Japan UG #43 組み込み勉強会
自己紹介 名前(ハンドル名):るぅて (@lutecia16v) 技術サークル 薔薇の騎士団にてGR-ROSEの同人誌を作成 https://knightsofrose.booth.pm/ https://techbookfest.org/organization/21840045 BOOTH: 技術書典:
本日の発表概要 GR-ROSEでコマンド式サーボの情報を取得し、ROSを使ってWebブラウザで表示する 組込みレベル: 初級 ROSレベル: 初級 必要な機材: GR-ROSE + KXR-A3S(or
KRS330x) + Raspberry Pi 4 + PC 使用するROS: ROS1(Noetic) + rosserial + rosbridge_suite + ROSLIBJS + roswww
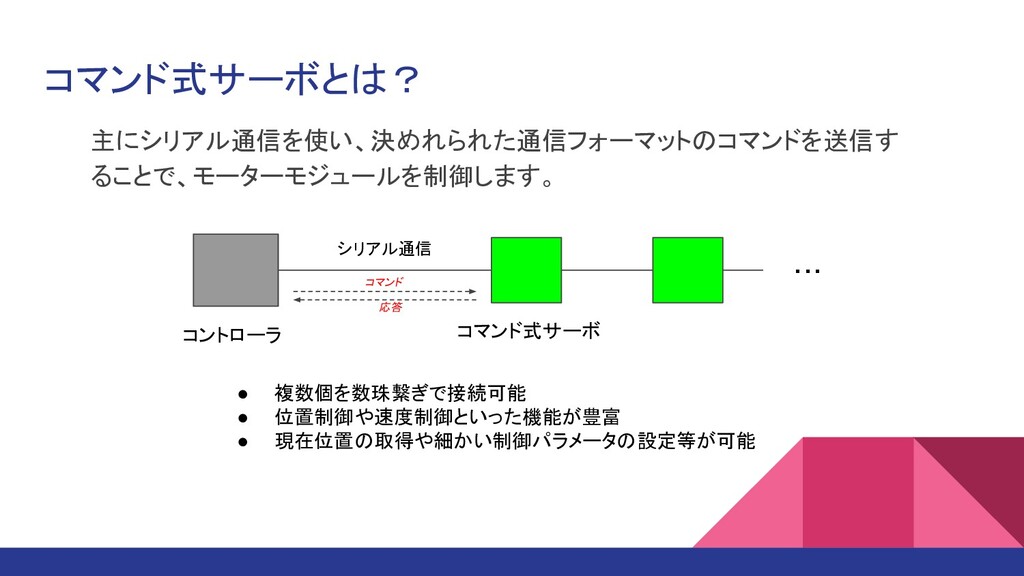
コマンド式サーボとは? 主にシリアル通信を使い、決めれられた通信フォーマットのコマンドを送信す ることで、モーターモジュールを制御します。 コントローラ コマンド式サーボ シリアル通信 ・・・ コマンド 応答 •
複数個を数珠繋ぎで接続可能 • 位置制御や速度制御といった機能が豊富 • 現在位置の取得や細かい制御パラメータの設定等が可能
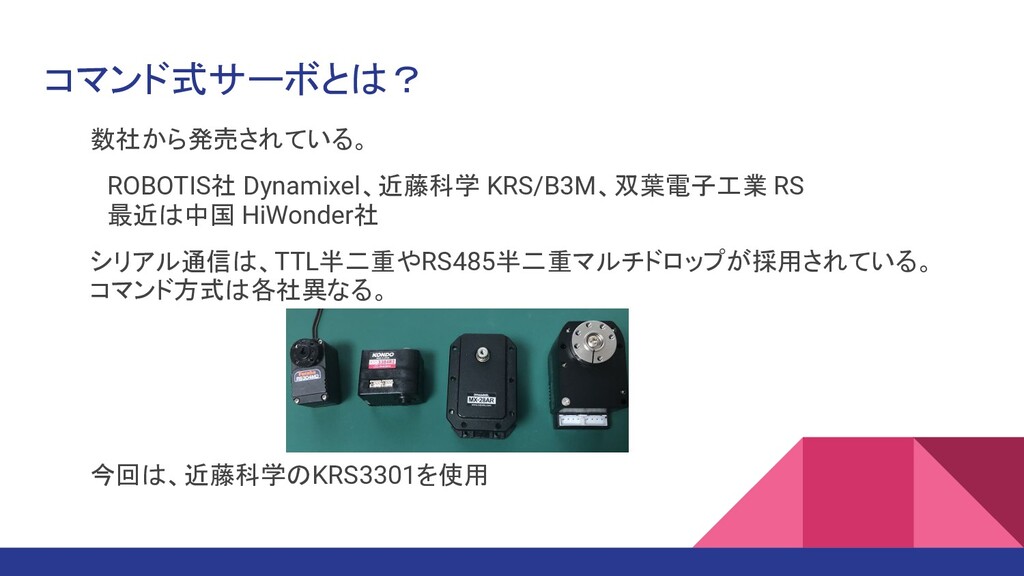
コマンド式サーボとは? 数社から発売されている。 ROBOTIS社 Dynamixel、近藤科学 KRS/B3M、双葉電子工業 RS 最近は中国 HiWonder社 シリアル通信は、TTL半二重やRS485半二重マルチドロップが採用されている。 コマンド方式は各社異なる。
今回は、近藤科学のKRS3301を使用
コマンド式サーボの接続(近藤科学の場合) 1) PC/SBCから コマンド式サーボ Dual USB アダプターHS 2) 組込みボード(arduino/STM32等)から 外部電源(6V)
TTL: コマンド式サーボ RS485USB/ シリアル変換 アダプター 外部電源(6Vとか) RS485: コマンド式サーボ ICS変換基板 外部電源(6Vとか) TTL: コマンド式サーボ RS485USB/ シリアル変換 アダプター 外部電源(6Vとか) RS485: ※R485 I/Fを持っている場合は不要。他 社のRS485 I/F基板でもよい。
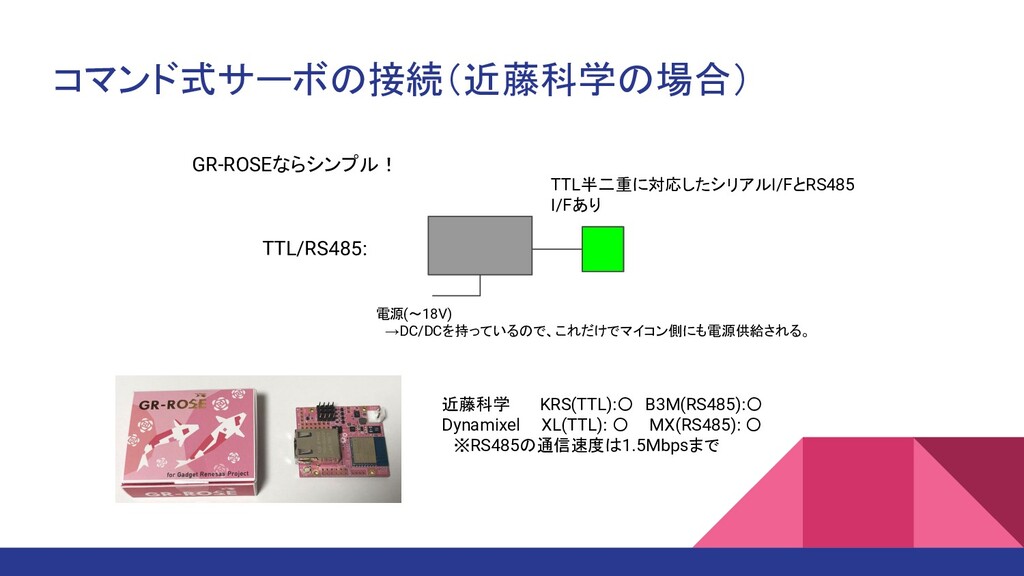
コマンド式サーボの接続(近藤科学の場合) GR-ROSEならシンプル! 電源(~18V) →DC/DCを持っているので、これだけでマイコン側にも電源供給される。 TTL/RS485: TTL半二重に対応したシリアルI/FとRS485 I/Fあり 近藤科学 KRS(TTL):〇 B3M(RS485):〇 Dynamixel
XL(TTL): 〇 MX(RS485): 〇 ※RS485の通信速度は1.5Mbpsまで
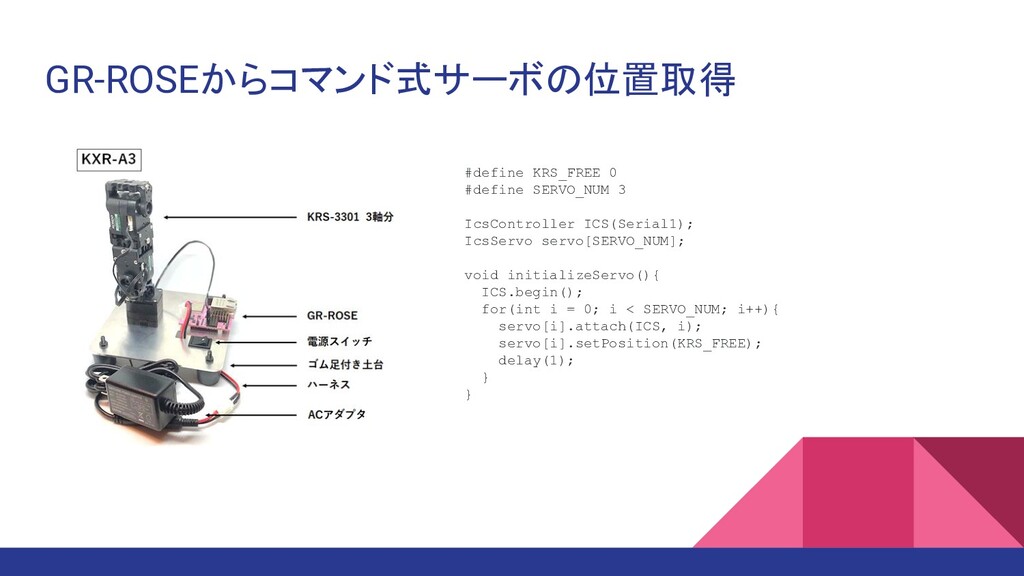
GR-ROSEからコマンド式サーボの位置取得 #define KRS_FREE 0 #define SERVO_NUM 3 IcsController ICS(Serial1); IcsServo
servo[SERVO_NUM]; void initializeServo(){ ICS.begin(); for(int i = 0; i < SERVO_NUM; i++){ servo[i].attach(ICS, i); servo[i].setPosition(KRS_FREE); delay(1); } }
GR-ROSEからコマンド式サーボの位置取得 uint16_t servo_pos[SERVO_NUM]; void setup() { Serial.begin(9600); initializeServo(); } void
getPositionAll(){ for(int i = 0; i < SERVO_NUM; i++){ servo_pos[i] = servo[i].getPosition(); delay(1); } } void loop() { getPositionAll(); Serial.print("POS:"); Serial.print("\t"); Serial.print(servo_pos[0]); Serial.print("\t"); Serial.print(servo_pos[1]); Serial.print("\t"); Serial.print(servo_pos[2]); Serial.print("\n"); delay(100); }
rosserialを使ってPublish 1) Raspberry Pi にROS環境とrosserial, rosserial_arudinoをインストール 2) Raspberry Pi上でrosserial_arduinoでライブラリを作成 3)
作成したライブラリをGR-ROSEの開発環境であるIDR for GRに取り込み IDR for GR : arudino IDEライクな開発環境 Noeticのrosserial_arduinoのライブラリは、nullptrを使用してい るので、コンパイルオプションに -std=gnu++11を付与
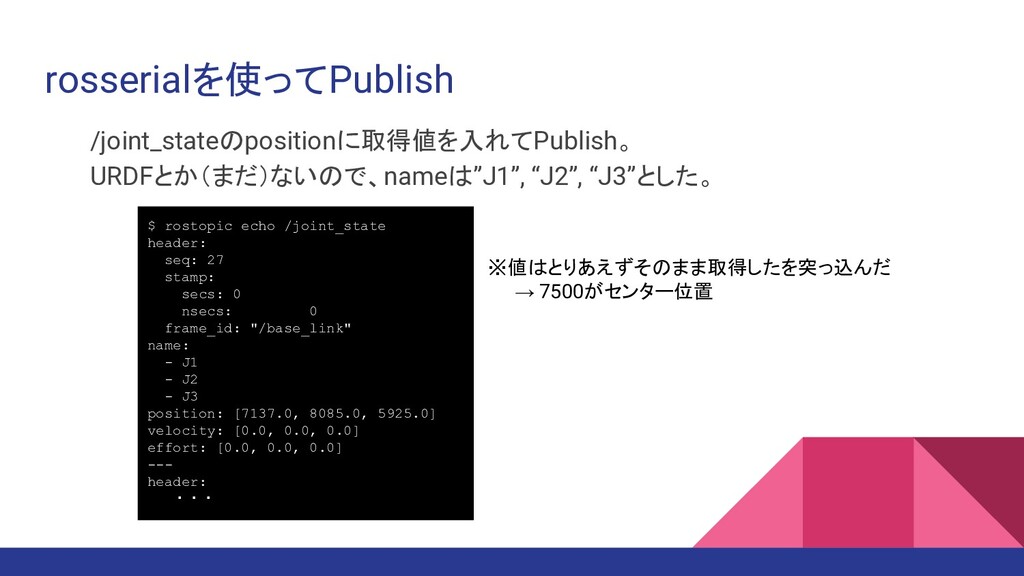
rosserialを使ってPublish /joint_stateのpositionに取得値を入れてPublish。 URDFとか(まだ)ないので、nameは”J1”, “J2”, “J3”とした。 $ rostopic echo /joint_state header:
seq: 27 stamp: secs: 0 nsecs: 0 frame_id: "/base_link" name: - J1 - J2 - J3 position: [7137.0, 8085.0, 5925.0] velocity: [0.0, 0.0, 0.0] effort: [0.0, 0.0, 0.0] --- header: ・・・ ※値はとりあえずそのまま取得したを突っ込んだ → 7500がセンター位置
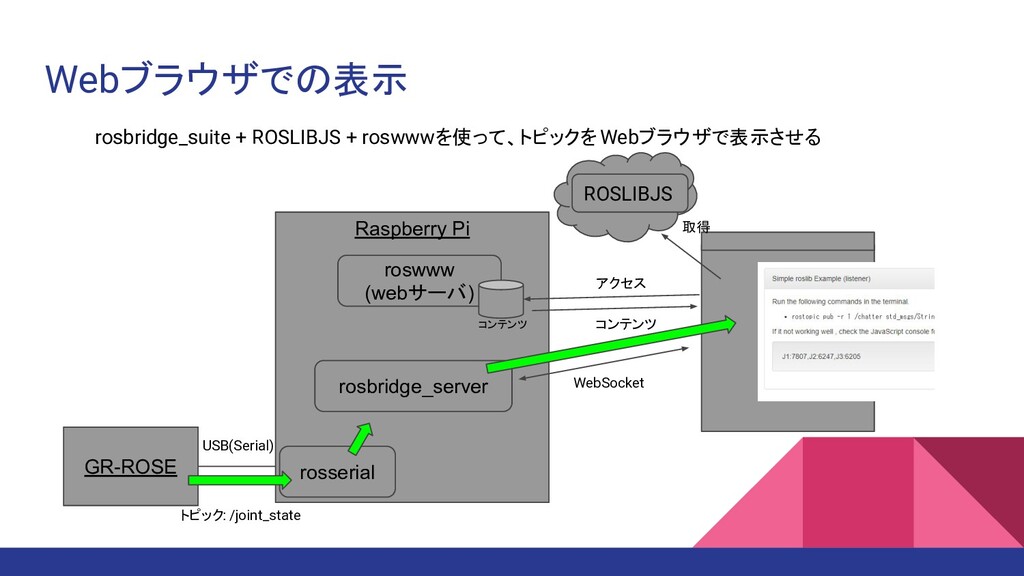
Webブラウザでの表示 rosbridge_suite + ROSLIBJS + roswwwを使って、トピックをWebブラウザで表示させる GR-ROSE Raspberry Pi rosserial
roswww (webサーバ) USB(Serial) トピック: /joint_state rosbridge_server コンテンツ ROSLIBJS アクセス コンテンツ 取得 WebSocket
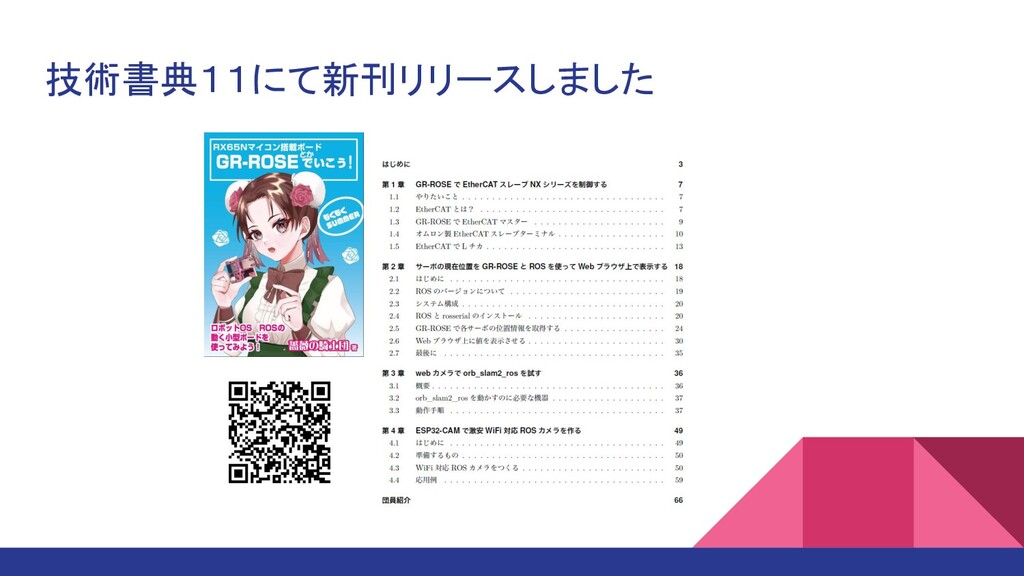
技術書典11にて新刊リリースしました
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![GR-ROSEからコマンド式サーボの位置取得 uint16_t servo_pos[SERVO_NUM]; void setup() { Serial.begin(9600); initializeServo(); } void](https://files.speakerdeck.com/presentations/d3d832ee5c404f8e9265a3c8ed35a1af/slide_8.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}