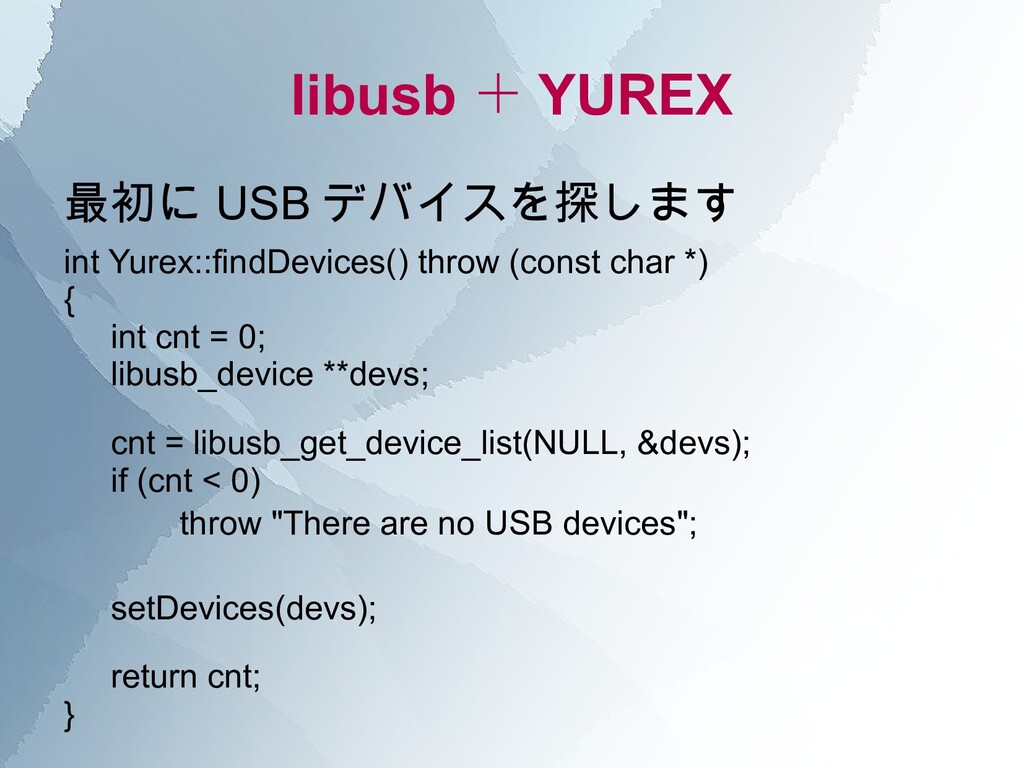
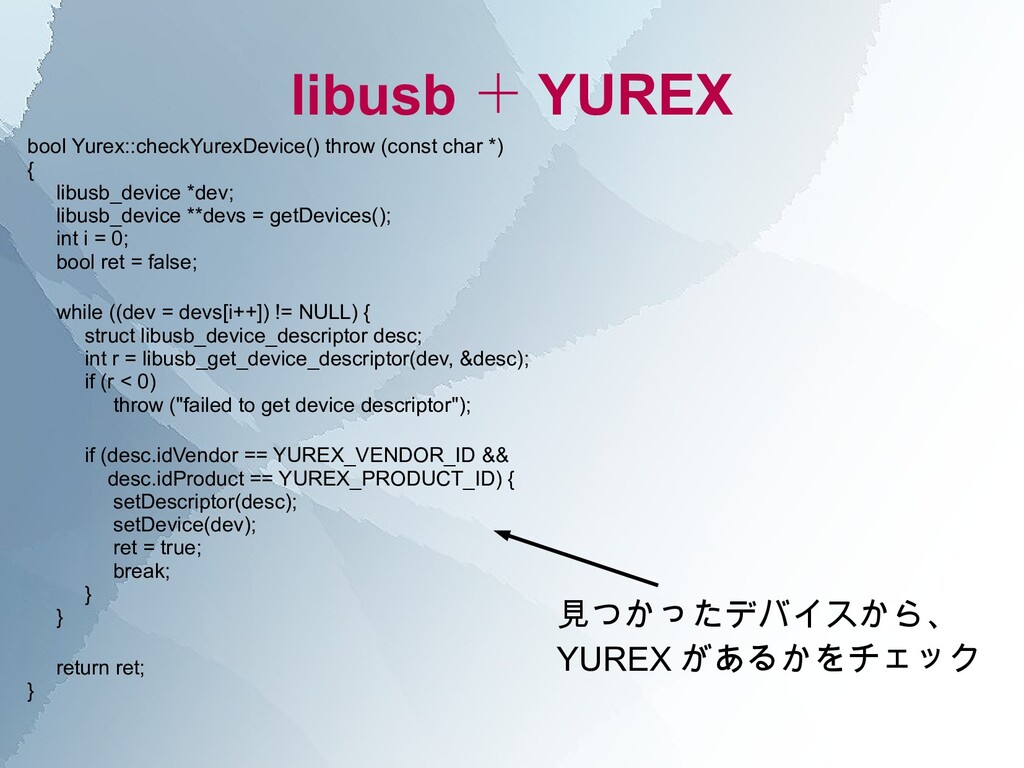
int cnt = 0; libusb_device **devs; cnt = libusb_get_device_list(NULL, &devs); if (cnt < 0) throw "There are no USB devices"; setDevices(devs); return cnt; } 最初に USB デバイスを探します
Product: 0x1010 Open Yurex device is success Kernel Driver Active Kernel Driver Detached! Claim to Yurex device ret is 0 Start search endpoint find endpoint Number of alternate settings: 0x1 | Interface Number: 0 | Number of endpoints: 0x1 | Descriptor Type: 0x5 | EP Address: 0x81 | ret is 0 : actual is 0x8 Writing Successful! ret is 0 : actual is 0x8 Reading Successful! 0x43:0:0:0:0:0x94:0xd:0: Done.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![libusb + YUREX bool Yurex::readDataSync() { unsigned char data[8] =](https://files.speakerdeck.com/presentations/b3dad3e4debf4639923989032725a431/slide_19.jpg){kind=link}
![libusb + YUREX [masami@moonlight:~/experiment/yurex]% sudo ./yurex Yurex info Vendor: 0xc45](https://files.speakerdeck.com/presentations/b3dad3e4debf4639923989032725a431/slide_20.jpg){kind=link}
{kind=link}