Modeling Human Imitation as Probabilistic Inference and an Application in Robotics
A part of the invited talk, "Infant imitation, brain, and social cognition" by Andrew N. Meltzoff, at HRI 2015 "Cognition: A Bridge between Robotics and Interaction" Workshop (http://www.macs.hw.ac.uk/~kl360/HRI2015W/index.html)
of other Self-experience plays an important role in goal inference and imitation Meltzoff, Dev Sci, 2007 Meltzoff, Acta Psychologica, 2007 Computational Model: Probabilistic instantiation of “Like-me” hypothesis
Chung, Abram L. Friesen, Dieter Fox, Andrew N. Meltzoff, and Rajesh P.N. Rao University of Washington HRI2015 Workshop Cognition: A Bridge between robotics and interaction
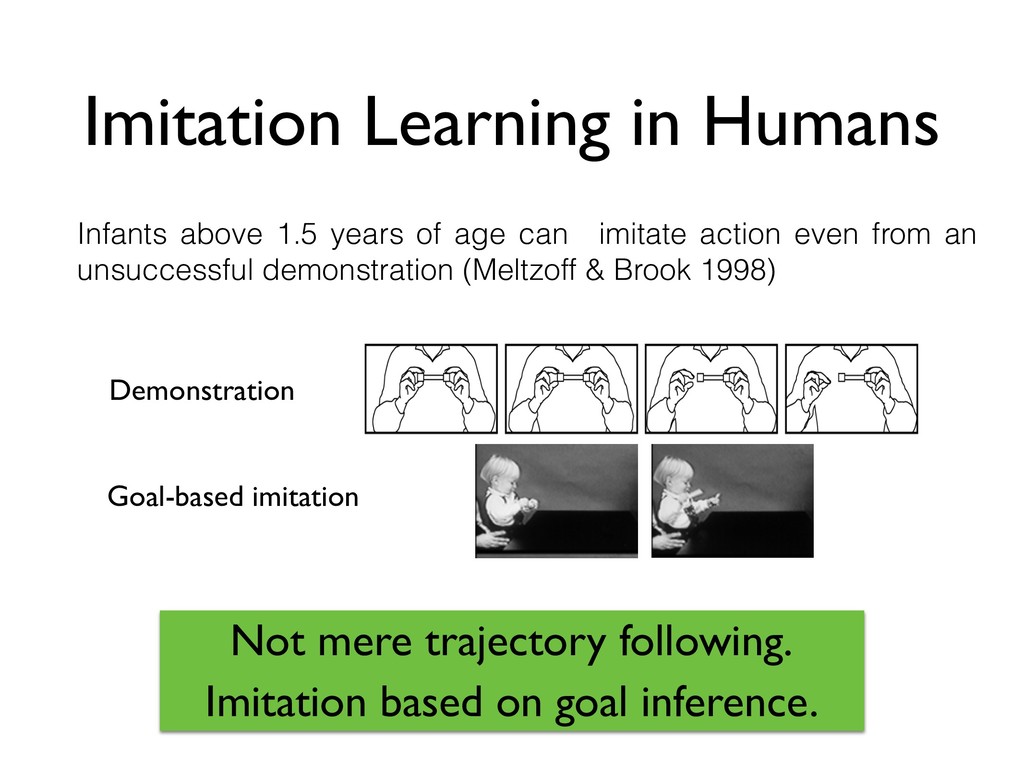
on goal inference. Demonstration Goal-based imitation Infants above 1.5 years of age can imitate action even from an unsuccessful demonstration (Meltzoff & Brook 1998)
of others. Self-experience plays an important role in goal inference and imitation. Computational Model: Probabilistic instantiation of “Like-me” hypothesis. Meltzoff, Dev Sci, 2007 Metlzoff, Acta Psychologica, 2007
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}