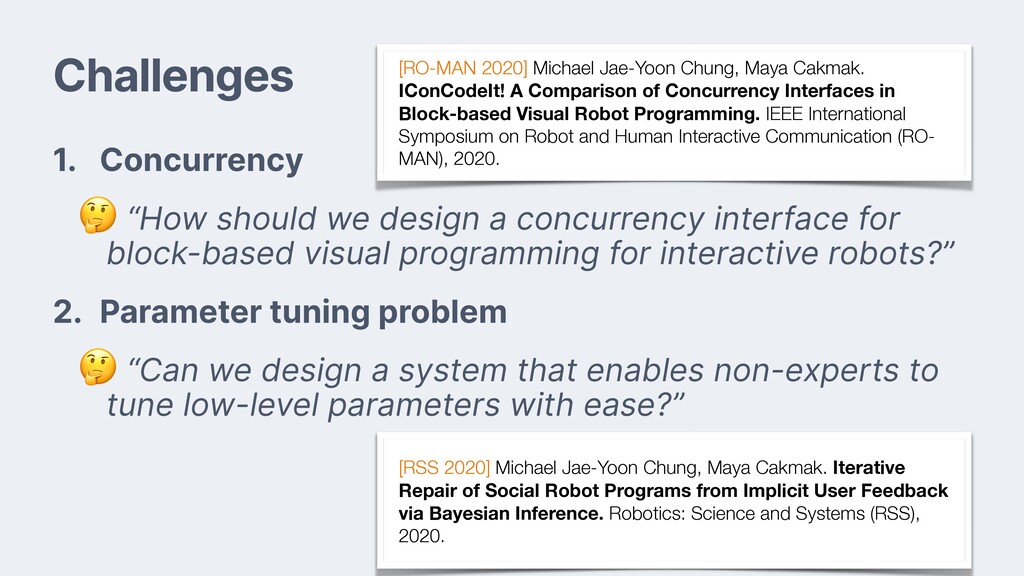
for block-based visual programming for interactive robots?” 2. Parameter tuning problem “Can we design a system that enables non-experts to tune low-level parameters with ease?” 8
for block-based visual programming for interactive robots?” 2. Parameter tuning problem “Can we design a system that enables non-experts to tune low-level parameters with ease?” 9 [RSS 2020] Michael Jae-Yoon Chung, Maya Cakmak. Iterative Repair of Social Robot Programs from Implicit User Feedback via Bayesian Inference. Robotics: Science and Systems (RSS), 2020. [RO-MAN 2020] Michael Jae-Yoon Chung, Maya Cakmak. IConCodeIt! A Comparison of Concurrency Interfaces in Block-based Visual Robot Programming. IEEE International Symposium on Robot and Human Interactive Communication (RO- MAN), 2020.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}