Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
Rayon (Rust Belt Rust)
Search
nikomatsakis
October 28, 2016
Programming
1.1k
7
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
Rayon (Rust Belt Rust)
A talk about Rayon from the Rust Belt Rust conference
nikomatsakis
October 28, 2016
More Decks by nikomatsakis
See All by nikomatsakis
Hereditary Harrop Formulas (Papers We Love Boston)
nikomatsakis
2
540
Rust: Systems Programming for All!
nikomatsakis
0
220
CppNow 2017
nikomatsakis
0
260
Rust at Mozilla (part of Mozilla Onboarding)
nikomatsakis
0
210
Guaranteeing Memory Safety and Data-Race Freedom in Rust
nikomatsakis
0
280
Other Decks in Programming
See All in Programming
20260623_Loop Engineeringで自分の分身の問い合わせBotを作る
ryugen04
0
220
Generative UI & AI-Assistants for Your Angular Solutions
manfredsteyer
PRO
1
180
どこまでゆるくて許されるのか
tk3fftk
0
490
yield再入門 #phpcon
o0h
PRO
0
360
Generative UI & AI-Assistants for Your Angular Solutions
manfredsteyer
PRO
0
110
琵琶湖の水は止められてもNet--HTTPのリトライは止められない / You might be able to stop the water flow of Lake Biwa but you can't stop Net::HTTP retries
luccafort
PRO
0
380
1年で人数1.5倍、PR数5.5倍増。 品質とアウトカムはどうなったか、 何が効いたか
ike002jp
0
130
気圧・高度・GPSを記録&可視化するアプリ「Koudo」を作った話
hjmkth
1
360
信頼性について考えてみる(SRE NEXT 2026 miniLT)
hayama17
0
190
SREは、MCPとSRE Agentをこう使え!
kazumax55
0
150
【やさしく解説 設計編 #1】「ドメイン駆動」と「実装駆動」ってなに? 〜設計の考え方を、たとえ話で学ぼう〜
panda728
PRO
1
120
Prismを使った型安全な暗号化_関数型まつり2026
_fhhmm
0
130
Featured
See All Featured
Reality Check: Gamification 10 Years Later
codingconduct
0
2.2k
Between Models and Reality
mayunak
4
370
Agile Leadership in an Agile Organization
kimpetersen
PRO
0
190
Building a Modern Day E-commerce SEO Strategy
aleyda
45
9.1k
Reflections from 52 weeks, 52 projects
jeffersonlam
356
21k
Kristin Tynski - Automating Marketing Tasks With AI
techseoconnect
PRO
0
290
[RailsConf 2023] Rails as a piece of cake
palkan
59
6.7k
Agile that works and the tools we love
rasmusluckow
331
22k
CoffeeScript is Beautiful & I Never Want to Write Plain JavaScript Again
sstephenson
162
16k
From π to Pie charts
rasagy
0
240
HDC tutorial
michielstock
2
740
A brief & incomplete history of UX Design for the World Wide Web: 1989–2019
jct
2
420
Transcript
Rayon Data Parallelism for Fun and Profit Nicholas Matsakis (nmatsakis
on IRC)
Want to make parallelization easy 2 fn load_images(paths: &[PathBuf]) ->
Vec<Image> { paths.iter() .map(|path| Image::load(path)) .collect() } fn load_images(paths: &[PathBuf]) -> Vec<Image> { paths.par_iter() .map(|path| Image::load(path)) .collect() } For each path… …load an image… …create and return a vector.
Want to make parallelization safe 3 fn load_images(paths: &[PathBuf]) ->
Vec<Image> { let mut pngs = 0; paths.par_iter() .map(|path| { if path.ends_with(“png”) { pngs += 1; } Image::load(path) }) .collect() } Data-race Will not compile
4 http://blog.faraday.io/saved-by-the-compiler-parallelizing-a-loop-with-rust-and-rayon/
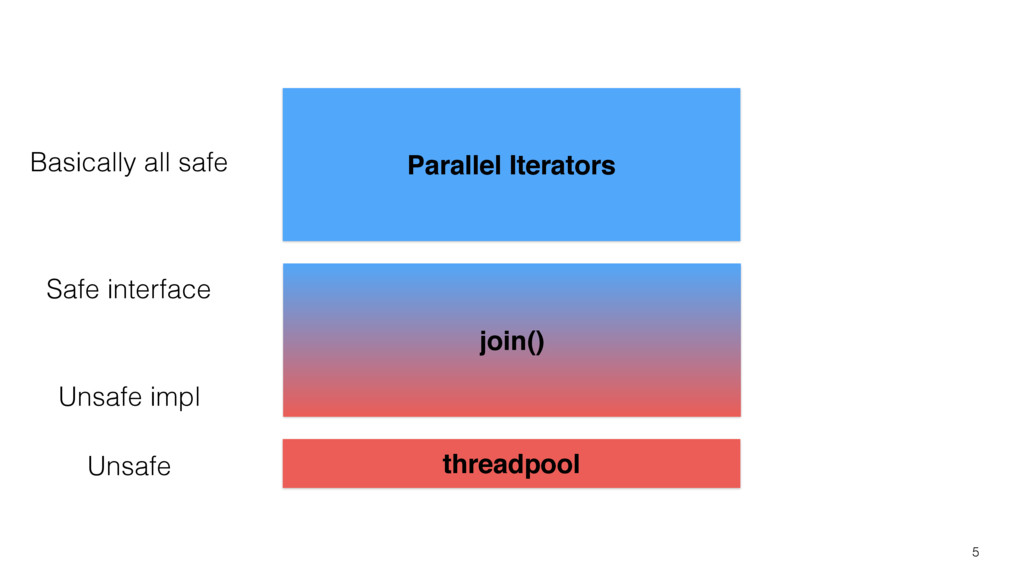
5 Parallel Iterators join() threadpool Basically all safe Safe interface
Unsafe impl Unsafe
6 fn load_images(paths: &[PathBuf]) -> Vec<Image> { paths.iter() .map(|path| Image::load(path))
.collect() }
7 fn load_images(paths: &[PathBuf]) -> Vec<Image> { paths.par_iter() .map(|path| Image::load(path))
.collect() }
Not quite that simple… 8 (but almost!) 1. No mutating
shared state (except for atomics, locks). 2. Some combinators are inherently sequential. 3. Some things aren’t implemented yet.
9 fn load_images(paths: &[PathBuf]) -> Vec<Image> { let mut pngs
= 0; paths.par_iter() .map(|path| { if path.ends_with(“png”) { pngs += 1; } Image::load(path) }) .collect() } Data-race Will not compile
10 `c` not shared between iterations! fn increment_all(counts: &mut [u32])
{ for c in counts.iter_mut() { *c += 1; } } fn increment_all(counts: &mut [u32]) { paths.par_iter_mut() .for_each(|c| *c += 1); }
fn load_images(paths: &[PathBuf]) -> Vec<Image> { let pngs = paths.par_iter()
.filter(|p| p.ends_with(“png”)) .map(|_| 1) .sum(); paths.par_iter() .map(|p| Image::load(p)) .collect() } 11
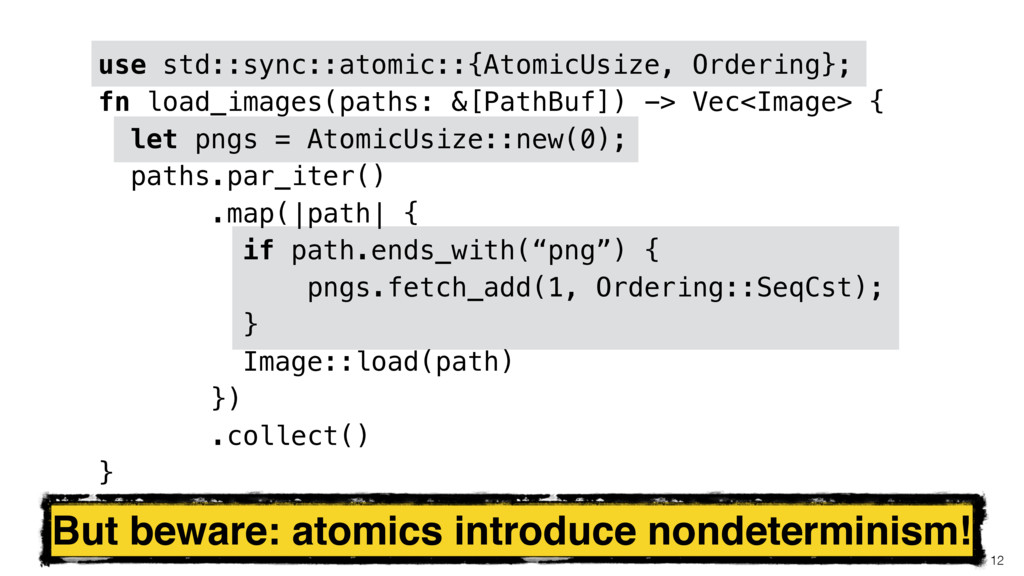
12 But beware: atomics introduce nondeterminism! use std::sync::atomic::{AtomicUsize, Ordering}; fn
load_images(paths: &[PathBuf]) -> Vec<Image> { let pngs = AtomicUsize::new(0); paths.par_iter() .map(|path| { if path.ends_with(“png”) { pngs.fetch_add(1, Ordering::SeqCst); } Image::load(path) }) .collect() }
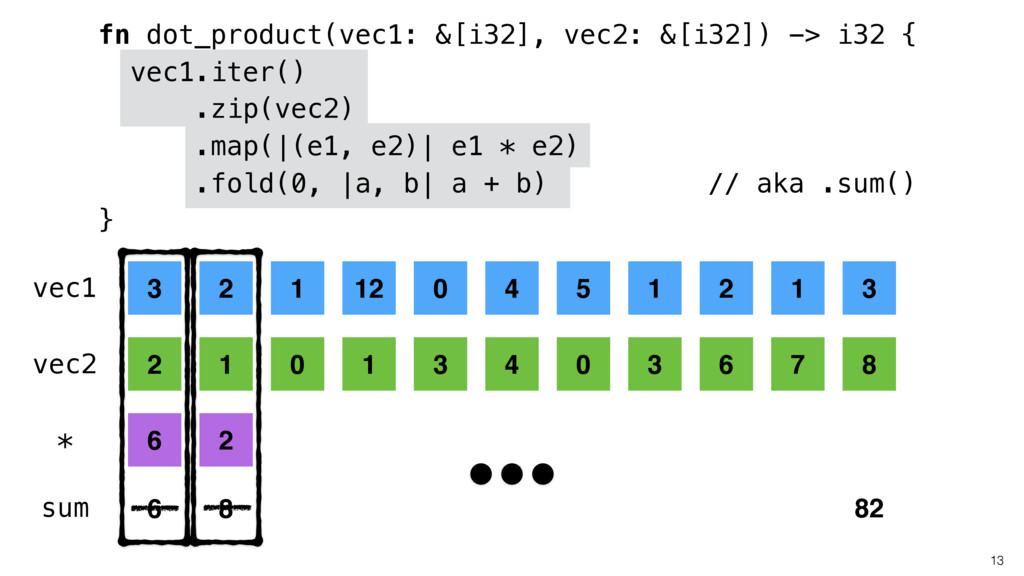
13 3 2 1 12 0 4 5 1 2
1 3 2 1 0 1 3 4 0 3 6 7 8 vec1 vec2 6 2 6 * sum 8 82 fn dot_product(vec1: &[i32], vec2: &[i32]) -> i32 { vec1.iter() .zip(vec2) .map(|(e1, e2)| e1 * e2) .fold(0, |a, b| a + b) // aka .sum() }
14 fn dot_product(vec1: &[i32], vec2: &[i32]) -> i32 { vec1.par_iter()
.zip(vec2) .map(|(e1, e2)| e1 * e2) .reduce(|| 0, |a, b| a + b) // aka .sum() } 3 2 1 12 0 4 5 1 2 1 3 2 1 0 1 3 4 0 3 6 7 8 vec1 vec2 sum 20 19 43 39 82
15 Parallel iterators: Mostly like normal iterators, but: • closures
cannot mutate shared state • some operations are different For the most part, Rust protects you from surprises.
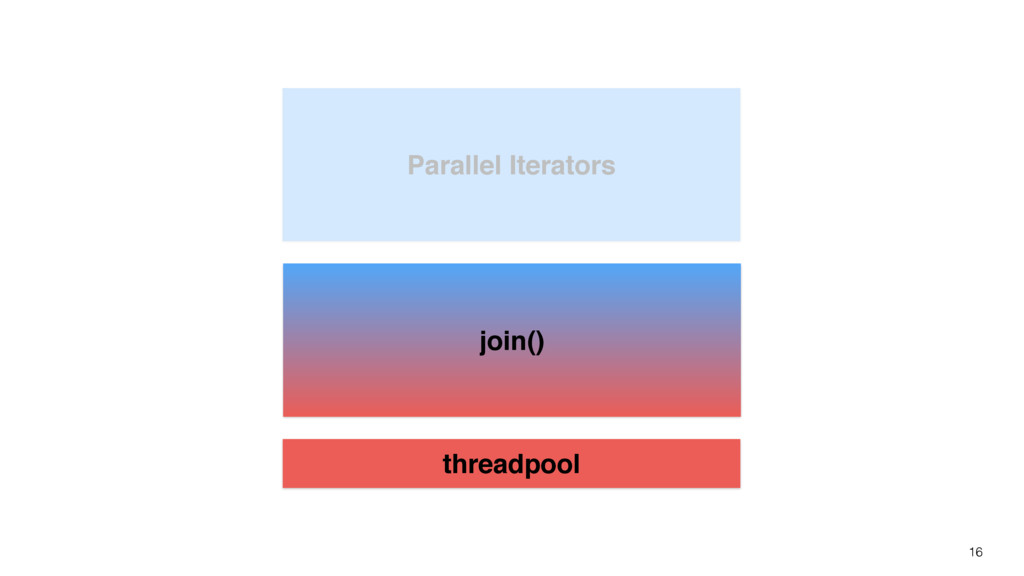
16 Parallel Iterators join() threadpool
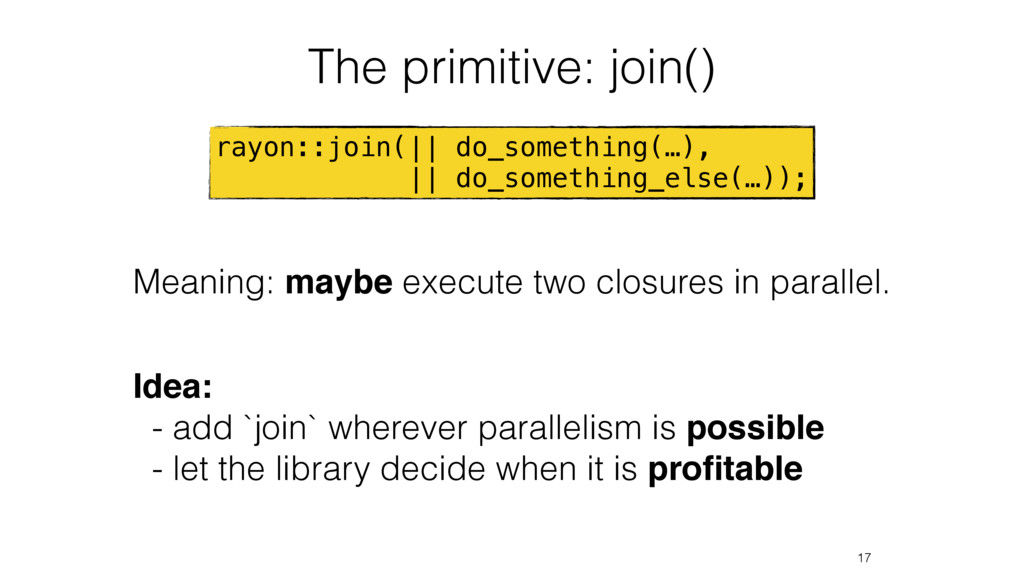
The primitive: join() 17 rayon::join(|| do_something(…), || do_something_else(…)); Meaning: maybe
execute two closures in parallel. Idea: - add `join` wherever parallelism is possible - let the library decide when it is profitable
18 fn load_images(paths: &[PathBuf]) -> Vec<Image> { paths.par_iter() .map(|path| Image::load(path))
.collect() } Image::load(paths[0]) Image::load(paths[1])
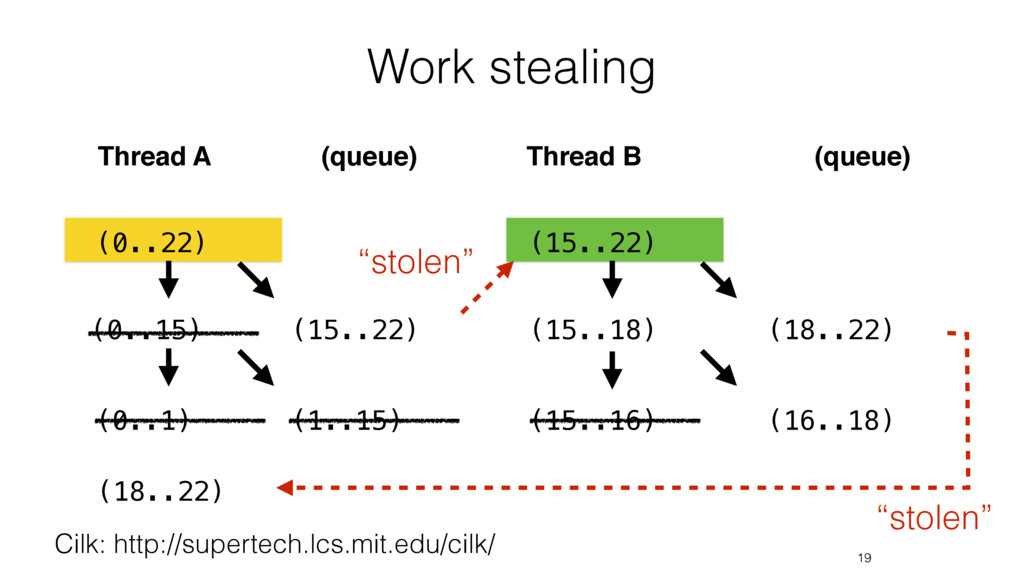
Work stealing 19 Cilk: http://supertech.lcs.mit.edu/cilk/ (0..22) Thread A Thread B
(0..15) (15..22) (1..15) (queue) (queue) (0..1) (15..22) (15..18) (18..22) (15..16) (16..18) “stolen” (18..22) “stolen”
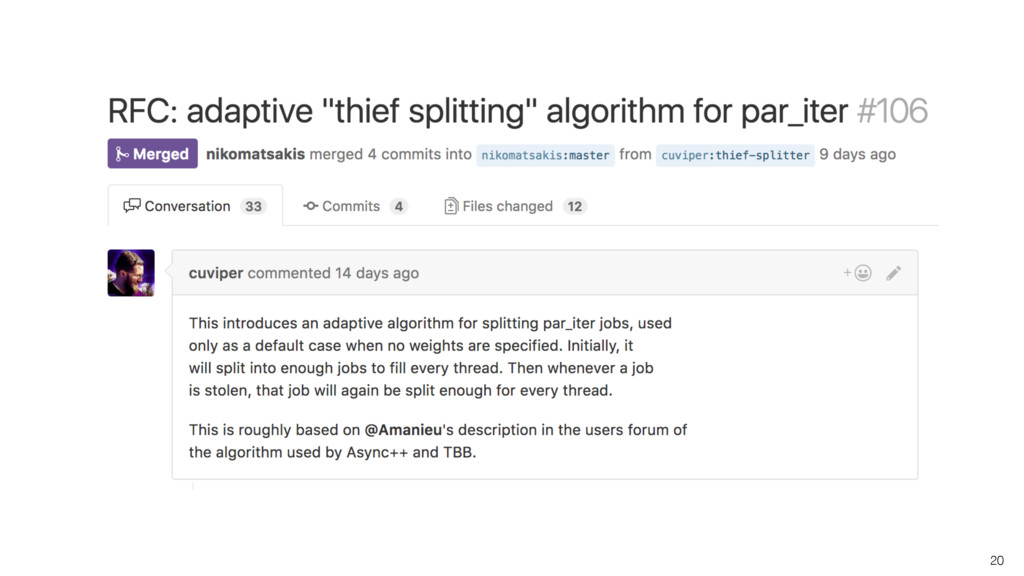
20
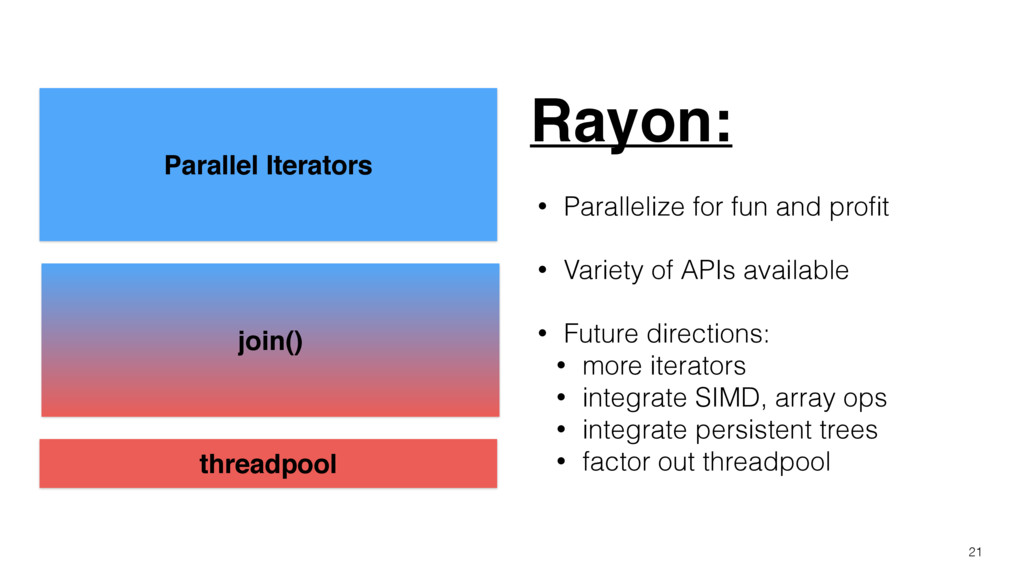
21 Parallel Iterators join() threadpool Rayon: • Parallelize for fun
and profit • Variety of APIs available • Future directions: • more iterators • integrate SIMD, array ops • integrate persistent trees • factor out threadpool
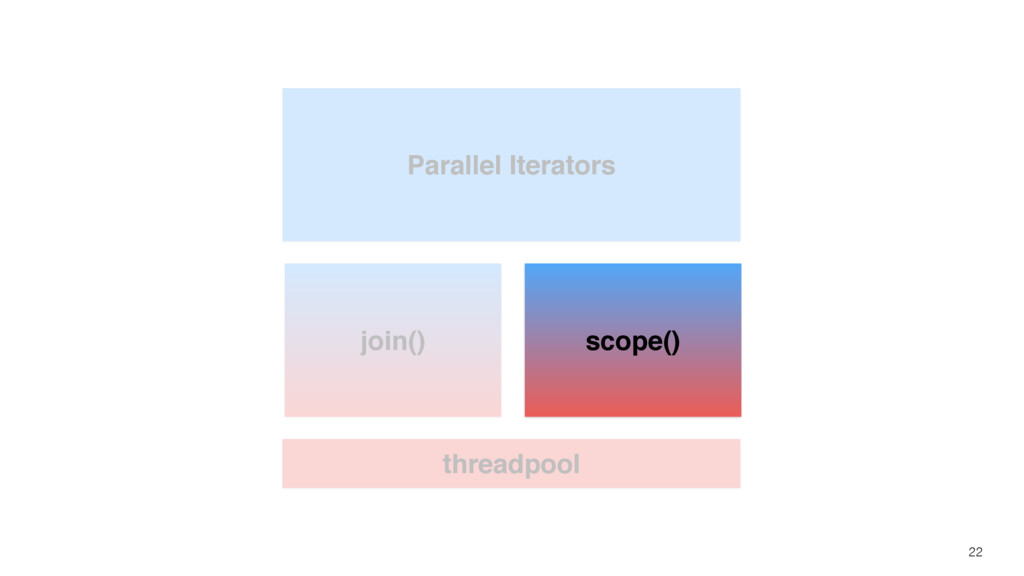
22 Parallel Iterators join() scope() threadpool
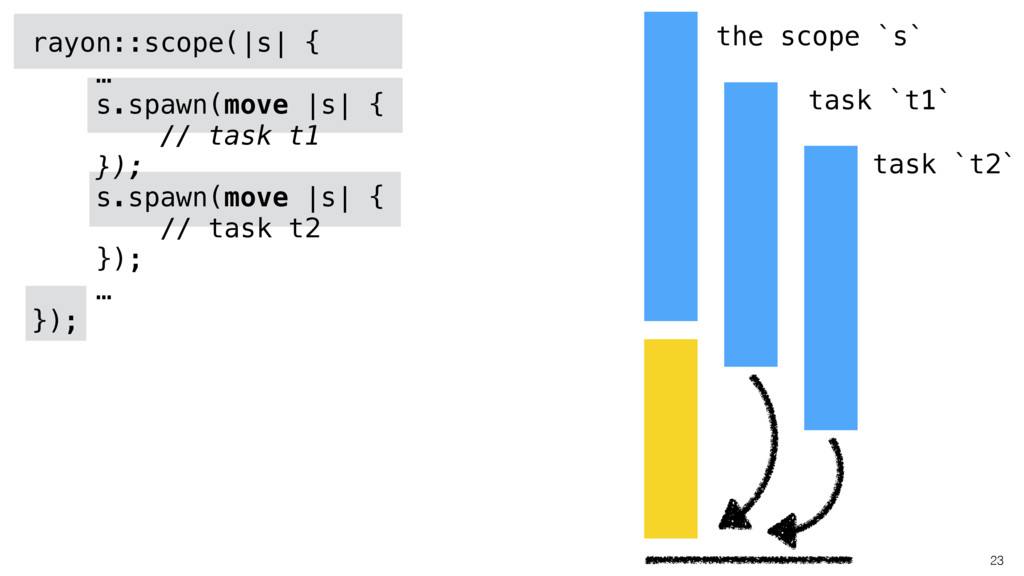
23 the scope `s` task `t1` task `t2` rayon::scope(|s| {
… s.spawn(move |s| { // task t1 }); s.spawn(move |s| { // task t2 }); … });
rayon::scope(|s| { … s.spawn(move |s| { // task t1 s.spawn(move
|s| { // task t2 … }); … }); … }); 24 the scope task t1 task t2
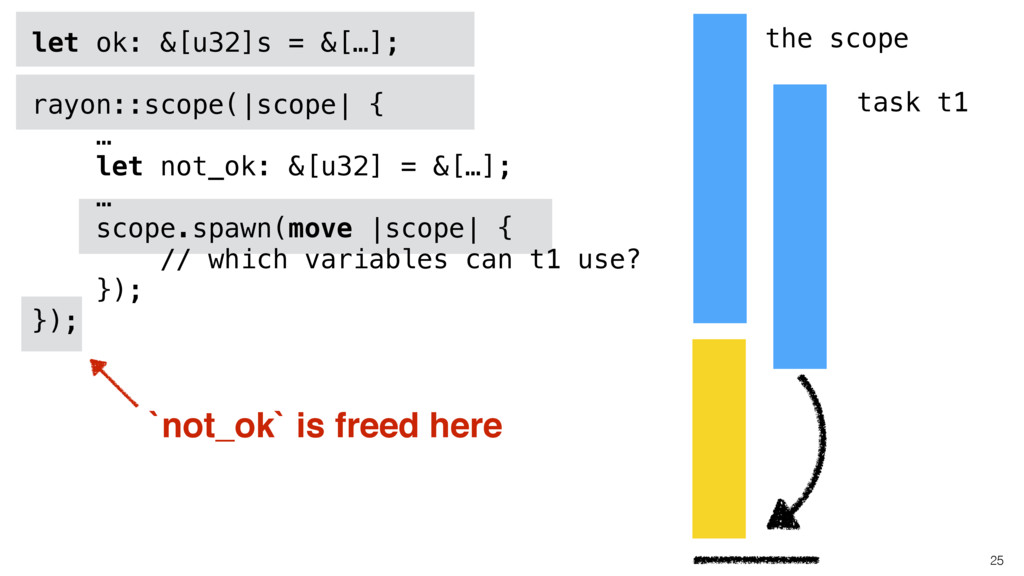
`not_ok` is freed here 25 the scope task t1 let
ok: &[u32]s = &[…]; rayon::scope(|scope| { … let not_ok: &[u32] = &[…]; … scope.spawn(move |scope| { // which variables can t1 use? }); });
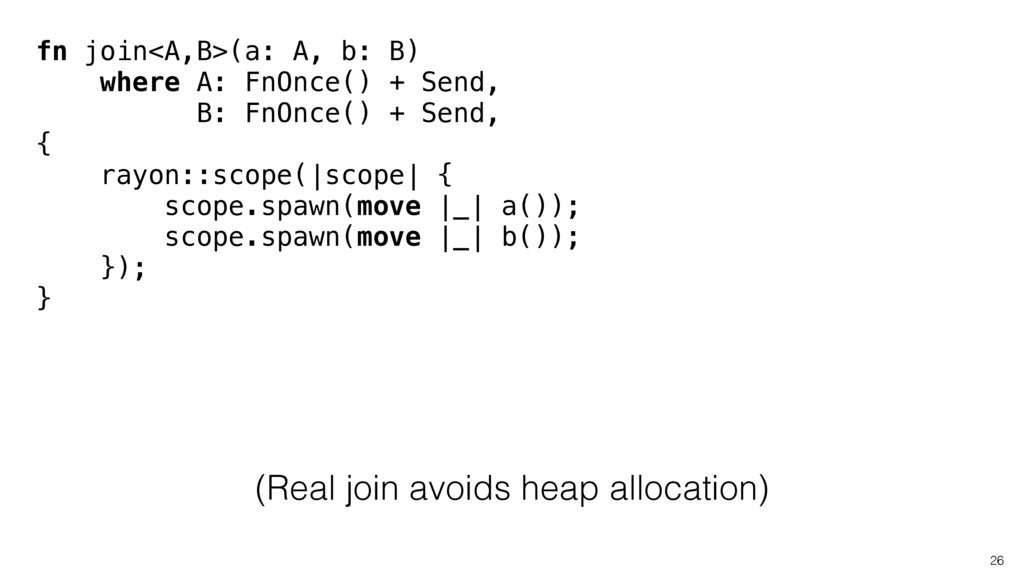
26 fn join<A,B>(a: A, b: B) where A: FnOnce() +
Send, B: FnOnce() + Send, { rayon::scope(|scope| { scope.spawn(move |_| a()); scope.spawn(move |_| b()); }); } (Real join avoids heap allocation)
27 struct Tree<T> { value: T, children: Vec<Tree<T>>, } impl<T>
Tree<T> { fn process_all(&mut self) { process_value(&mut self.value); for child in &mut self.children { child.process_all(); } } }
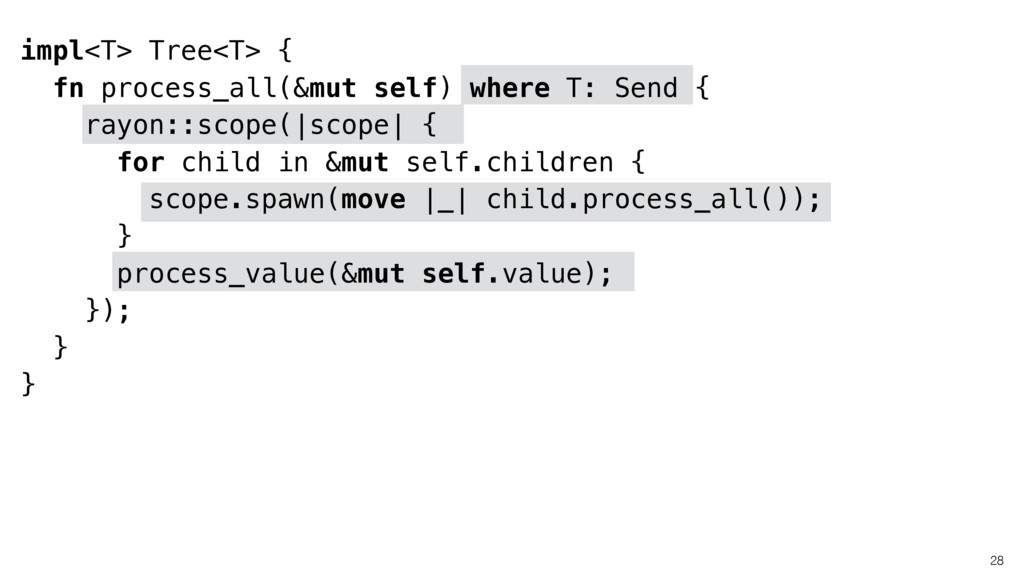
28 impl<T> Tree<T> { fn process_all(&mut self) where T: Send
{ rayon::scope(|scope| { for child in &mut self.children { scope.spawn(move |_| child.process_all()); } process_value(&mut self.value); }); } }
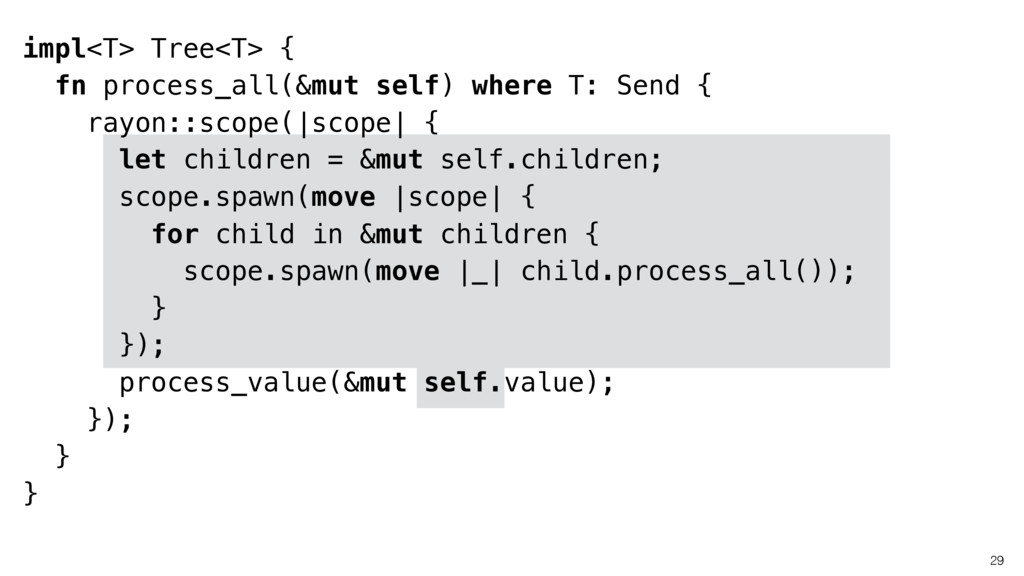
29 impl<T> Tree<T> { fn process_all(&mut self) where T: Send
{ rayon::scope(|scope| { let children = &mut self.children; scope.spawn(move |scope| { for child in &mut children { scope.spawn(move |_| child.process_all()); } }); process_value(&mut self.value); }); } }
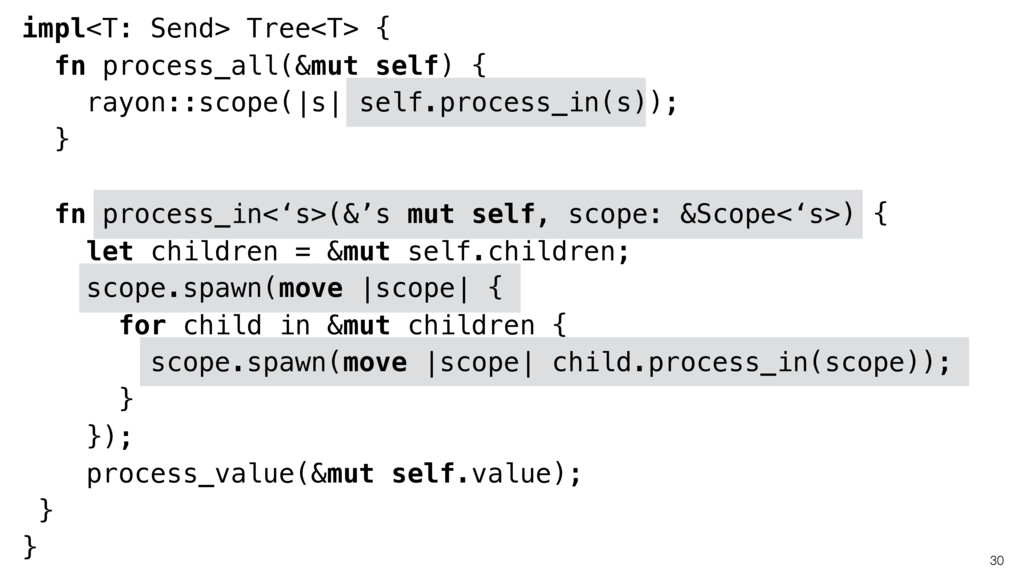
30 impl<T: Send> Tree<T> { fn process_all(&mut self) { rayon::scope(|s|
self.process_in(s)); } fn process_in<‘s>(&’s mut self, scope: &Scope<‘s>) { let children = &mut self.children; scope.spawn(move |scope| { for child in &mut children { scope.spawn(move |scope| child.process_in(scope)); } }); process_value(&mut self.value); } }
{kind=link}
![Want to make parallelization easy 2 fn load_images(paths: &[PathBuf]) ->](https://files.speakerdeck.com/presentations/63ed54901da34afb8aef7b4d37752302/slide_1.jpg){kind=link}
![Want to make parallelization safe 3 fn load_images(paths: &[PathBuf]) ->](https://files.speakerdeck.com/presentations/63ed54901da34afb8aef7b4d37752302/slide_2.jpg){kind=link}
{kind=link}
{kind=link}
![6 fn load_images(paths: &[PathBuf]) -> Vec<Image> { paths.iter() .map(|path| Image::load(path))](https://files.speakerdeck.com/presentations/63ed54901da34afb8aef7b4d37752302/slide_5.jpg){kind=link}
![7 fn load_images(paths: &[PathBuf]) -> Vec<Image> { paths.par_iter() .map(|path| Image::load(path))](https://files.speakerdeck.com/presentations/63ed54901da34afb8aef7b4d37752302/slide_6.jpg){kind=link}
{kind=link}
![9 fn load_images(paths: &[PathBuf]) -> Vec<Image> { let mut pngs](https://files.speakerdeck.com/presentations/63ed54901da34afb8aef7b4d37752302/slide_8.jpg){kind=link}
![10 `c` not shared between iterations! fn increment_all(counts: &mut [u32])](https://files.speakerdeck.com/presentations/63ed54901da34afb8aef7b4d37752302/slide_9.jpg){kind=link}
![fn load_images(paths: &[PathBuf]) -> Vec<Image> { let pngs = paths.par_iter()](https://files.speakerdeck.com/presentations/63ed54901da34afb8aef7b4d37752302/slide_10.jpg){kind=link}
{kind=link}
{kind=link}
![14 fn dot_product(vec1: &[i32], vec2: &[i32]) -> i32 { vec1.par_iter()](https://files.speakerdeck.com/presentations/63ed54901da34afb8aef7b4d37752302/slide_13.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
![18 fn load_images(paths: &[PathBuf]) -> Vec<Image> { paths.par_iter() .map(|path| Image::load(path))](https://files.speakerdeck.com/presentations/63ed54901da34afb8aef7b4d37752302/slide_17.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}