Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
An introduction of statistical learning
Search
Nakamura, Ryotaro
June 28, 2017
Science
54
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
An introduction of statistical learning
Nakamura, Ryotaro
June 28, 2017
More Decks by Nakamura, Ryotaro
See All by Nakamura, Ryotaro
Duct for beginners.
nryotaro
0
4.3k
Learn Go in 15 minutes
nryotaro
0
52
Seven architectural patterns
nryotaro
1
110
Improving Performance with Parallel Programming
nryotaro
0
66
Other Decks in Science
See All in Science
Physical AIを支えるWeights & Biases
olachinkei
1
440
Cross-Media Technologies, Information Science and Human-Information Interaction
signer
PRO
3
32k
Utiliser Bitcoin sans Internet
rlifchitz
0
310
俺たちは本当に分かり合えるのか? ~ PdMとスクラムチームの “ずれ” を科学する
bonotake
3
2.5k
ハミルトン・ヤコビ方程式の解の性質と物理的意味
enakai00
0
850
データベース09: 実体関連モデル上の一貫性制約
trycycle
PRO
0
1.8k
ssmonline #51 ヤマサキ春のサメ祭り 2026 / ssmjp Yamasaki Spring JAWS Festival 2026
naospon
1
110
J-STAGE全文XML登載必須化について
xspa2012
0
1.2k
TypeScript で WebAssembly を用いた 型安全なプラグイン設計
nagano
2
580
データベース04: SQL (1/3) 単純質問 & 集約演算
trycycle
PRO
0
1.6k
Conwayの法則を"ちゃんと"使うために — 原典でConwayは何を言っていたのか
bonotake
10
6.1k
データベース10: 拡張実体関連モデル
trycycle
PRO
0
1.6k
Featured
See All Featured
AI: The stuff that nobody shows you
jnunemaker
PRO
9
860
The Organizational Zoo: Understanding Human Behavior Agility Through Metaphoric Constructive Conversations (based on the works of Arthur Shelley, Ph.D)
kimpetersen
PRO
0
400
The AI Search Optimization Roadmap by Aleyda Solis
aleyda
1
6k
Navigating Team Friction
lara
192
16k
How Fast Is Fast Enough? [PerfNow 2025]
tammyeverts
3
680
StorybookのUI Testing Handbookを読んだ
zakiyama
31
6.9k
Art, The Web, and Tiny UX
lynnandtonic
304
22k
CSS Pre-Processors: Stylus, Less & Sass
bermonpainter
360
30k
Learning to Love Humans: Emotional Interface Design
aarron
275
41k
Chrome DevTools: State of the Union 2024 - Debugging React & Beyond
addyosmani
10
1.3k
"I'm Feeling Lucky" - Building Great Search Experiences for Today's Users (#IAC19)
danielanewman
230
23k
HTML-Aware ERB: The Path to Reactive Rendering @ RubyCon 2026, Rimini, Italy
marcoroth
3
380
Transcript
ػցֶशษڧձ ୈ 1 ճ தଜ ྒྷଠ June 13, 2017
Table of contents Supervised Learning 1. Classification 2. Perceptron 3.
Regression Unsupervised Learning 4. Clustering 1
ࠓͷඪ ࣍ճҎ߱ʹֶͿΞϧΰϦζϜͷ֓ཁΛΔ ΞϧΰϦζϜͱద༻ྫ ΞϧΰϦζϜ ద༻ྫ ྨ εύϜϝʔϧఆ ճؼੳ ച্༧ଌ ΫϥελϦϯά
ը૾ͷݮ৭ॲཧ 2
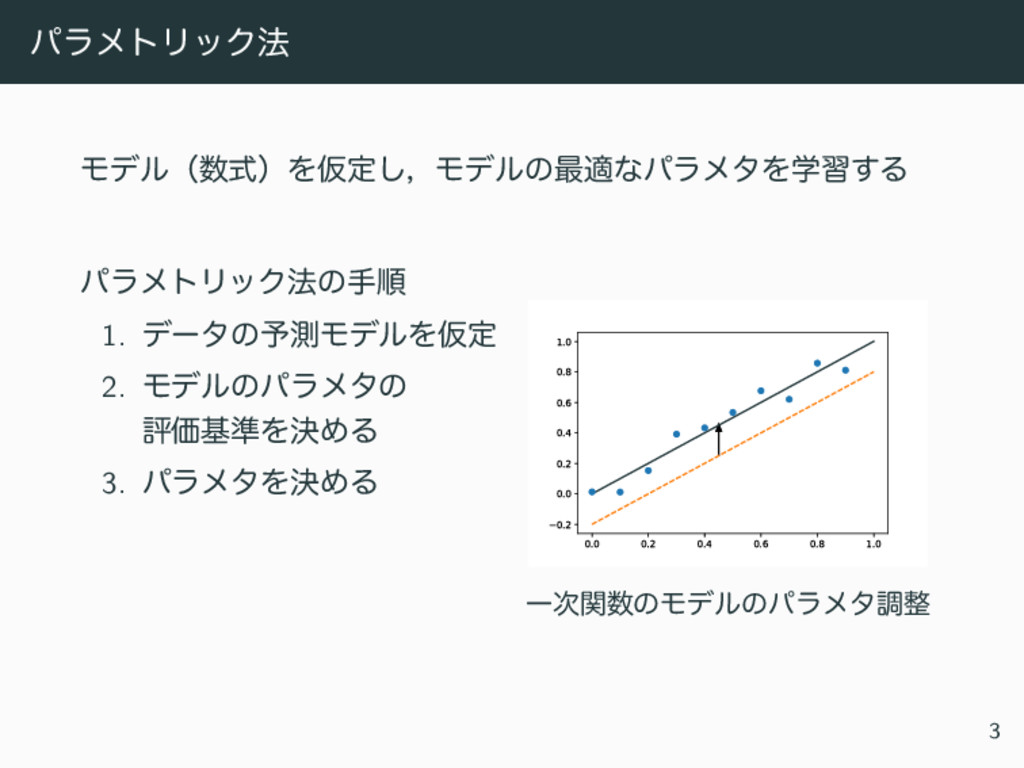
ύϥϝτϦοΫ๏ ϞσϧʢࣜʣΛԾఆ͠ɼϞσϧͷ࠷దͳύϥϝλΛֶश͢Δ ύϥϝτϦοΫ๏ͷखॱ 1. σʔλͷ༧ଌϞσϧΛԾఆ 2. Ϟσϧͷύϥϝλͷ ධՁج४ΛܾΊΔ 3. ύϥϝλΛܾΊΔ
0.0 0.2 0.4 0.6 0.8 1.0 −0.2 0.0 0.2 0.4 0.6 0.8 1.0 Ұ࣍ؔͷϞσϧͷύϥϝλௐ 3
Classification
ྨ Ϋϥεʹྨ͞ΕͨطଘσʔλΛݩʹ৽نσʔλΛྨ͢Δ ΞϧΰϦζϜ • ύʔηϓτϩϯ • ϩδεςΟοΫճؼ 4
Perceptron
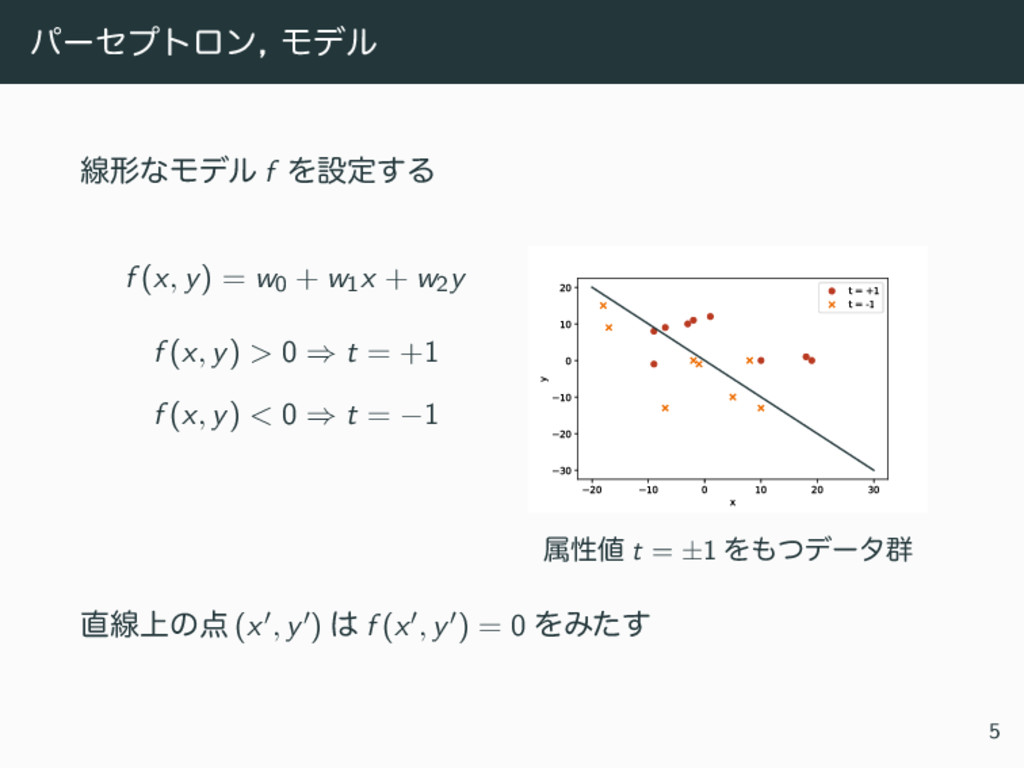
ύʔηϓτϩϯ, Ϟσϧ ઢܗͳϞσϧ f Λઃఆ͢Δ f (x, y) = w0
+ w1x + w2y f (x, y) > 0 ⇒ t = +1 f (x, y) < 0 ⇒ t = −1 −20 −10 0 10 20 30 x −30 −20 −10 0 10 20 y t = +1 t = -1 ଐੑ t = ±1 Λͭσʔλ܈ ઢ্ͷ (x′, y′) f (x′, y′) = 0 ΛΈͨ͢ 5
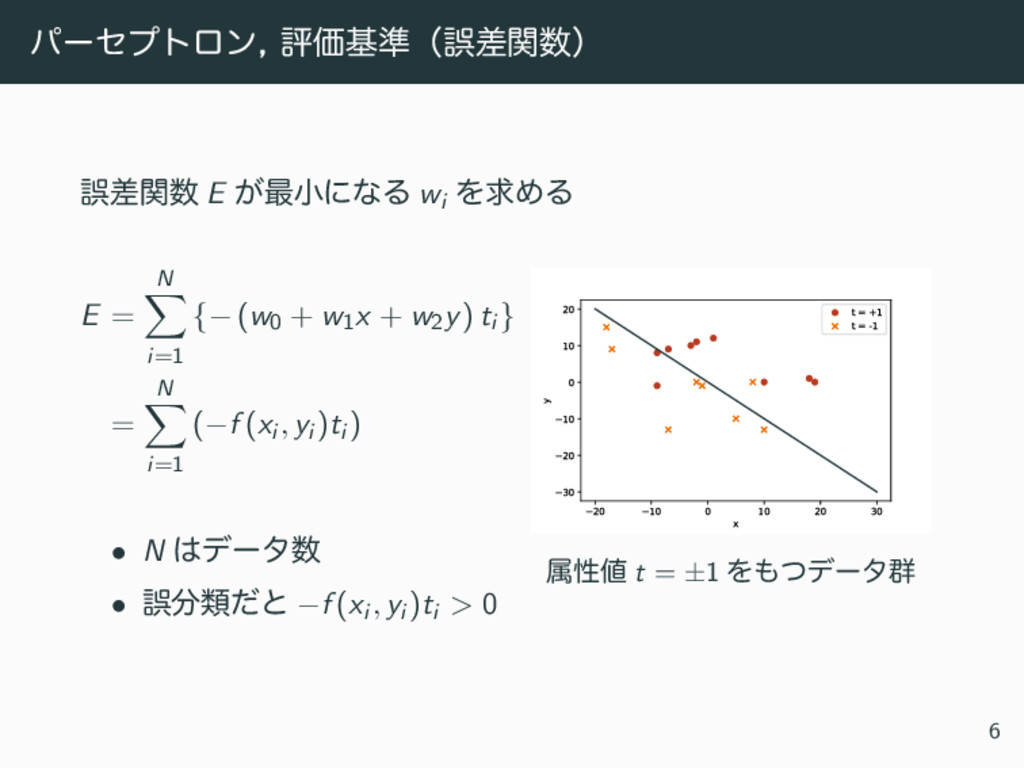
ύʔηϓτϩϯ, ධՁج४ʢޡࠩؔʣ ޡࠩؔ E ͕࠷খʹͳΔ wi ΛٻΊΔ E = N
∑ i=1 {− (w0 + w1x + w2y) ti } = N ∑ i=1 (−f (xi , yi )ti ) • N σʔλ • ޡྨͩͱ −f (xi , yi )ti > 0 −20 −10 0 10 20 30 x −30 −20 −10 0 10 20 y t = +1 t = -1 ଐੑ t = ±1 Λͭσʔλ܈ 6
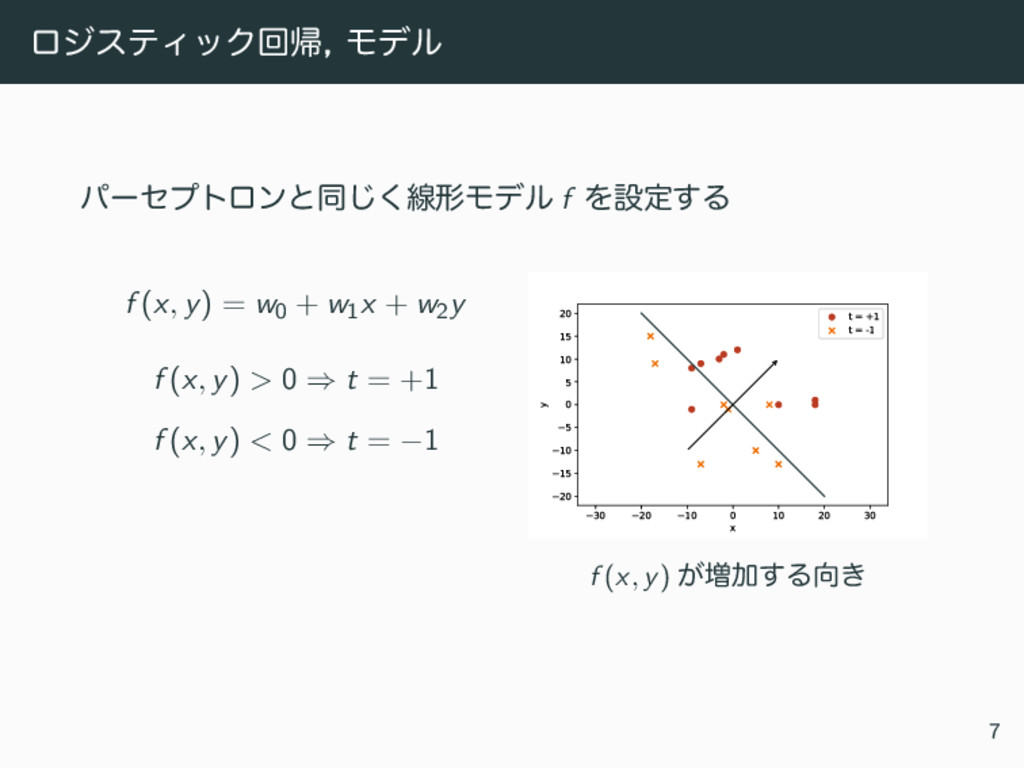
ϩδεςΟοΫճؼ, Ϟσϧ ύʔηϓτϩϯͱಉ͘͡ઢܗϞσϧ f Λઃఆ͢Δ f (x, y) = w0
+ w1x + w2y f (x, y) > 0 ⇒ t = +1 f (x, y) < 0 ⇒ t = −1 −30 −20 −10 0 10 20 30 x −20 −15 −10 −5 0 5 10 15 20 y t = +1 t = -1 f (x, y) ͕૿Ճ͢Δ͖ 7
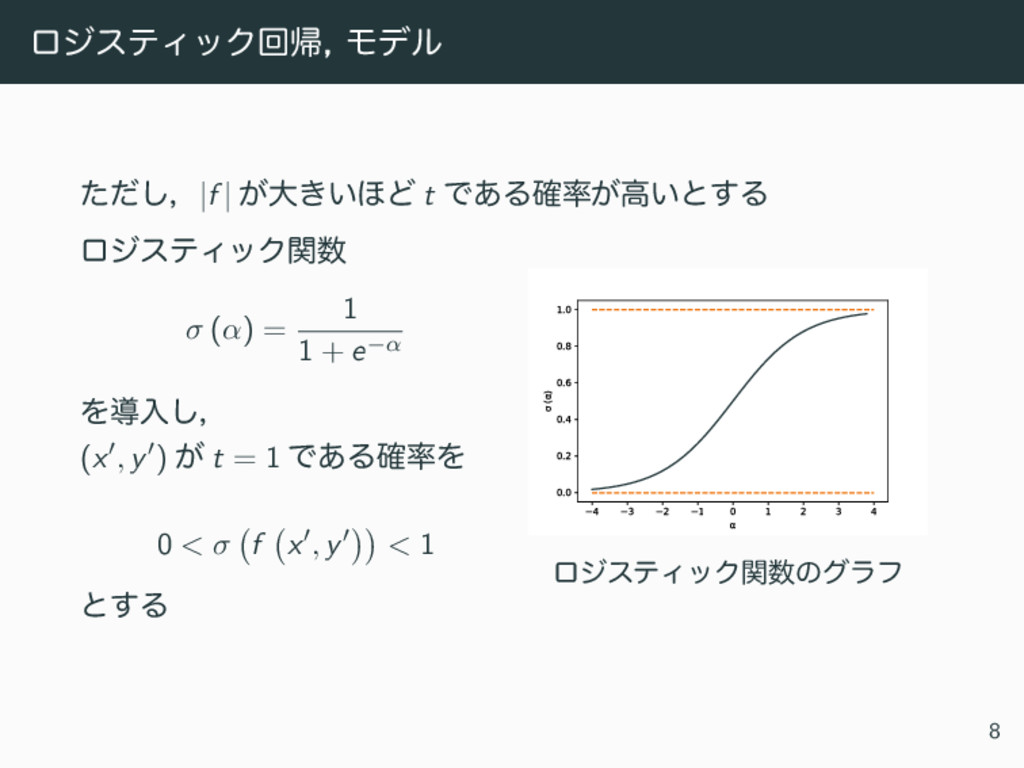
ϩδεςΟοΫճؼ, Ϟσϧ ͨͩ͠ɼ|f | ͕େ͖͍΄Ͳ t Ͱ͋Δ͕֬ߴ͍ͱ͢Δ ϩδεςΟοΫؔ σ (α)
= 1 1 + e−α Λಋೖ͠ɼ (x′, y′) ͕ t = 1 Ͱ͋Δ֬Λ 0 < σ ( f ( x′, y′ )) < 1 ͱ͢Δ −4 −3 −2 −1 0 1 2 3 4 α 0.0 0.2 0.4 0.6 0.8 1.0 σ (α) ϩδεςΟοΫؔͷάϥϑ 8
ϩδεςΟοΫճؼ, ධՁج४ʢ࠷ਪఆʣ ܇࿅σʔλ͕ಘΒΕΔ֬ P Λ࠷େʹ͢Δ wi ΛٻΊΔ p(x, y) =
σ(x0 + w1x + w2y) P = N ∏ i p (xi , yi )tn {1 − p (xi , yi )}1−tn ܇࿅σʔλ࠷ൃੜ͕֬ߴ͍σʔλͰ͋ΔͱԾఆ͍ͯ͠Δ 9
Regression
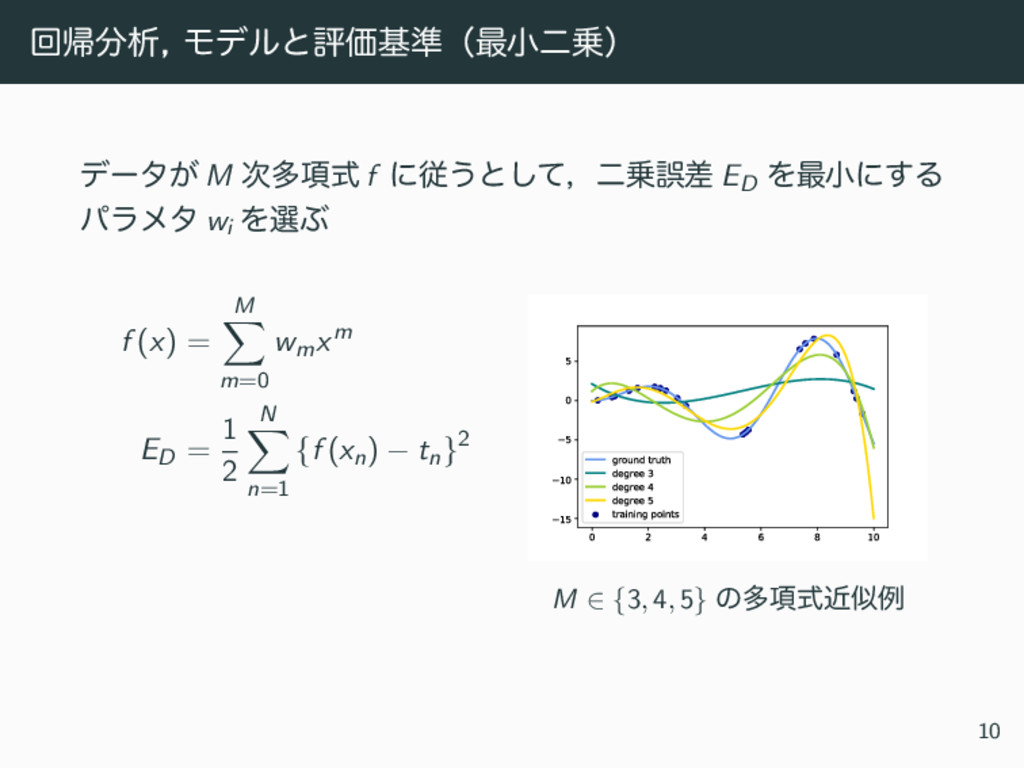
ճؼੳ, ϞσϧͱධՁج४ʢ࠷খೋʣ σʔλ͕ M ࣍ଟ߲ࣜ f ʹै͏ͱͯ͠ɼೋޡࠩ ED Λ࠷খʹ͢Δ ύϥϝλ
wi ΛબͿ f (x) = M ∑ m=0 wmxm ED = 1 2 N ∑ n=1 {f (xn) − tn}2 0 2 4 6 8 10 −15 −10 −5 0 5 ground truth degree 3 degree 4 degree 5 training points M ∈ {3, 4, 5} ͷଟ߲ࣜۙࣅྫ 10
Clustering
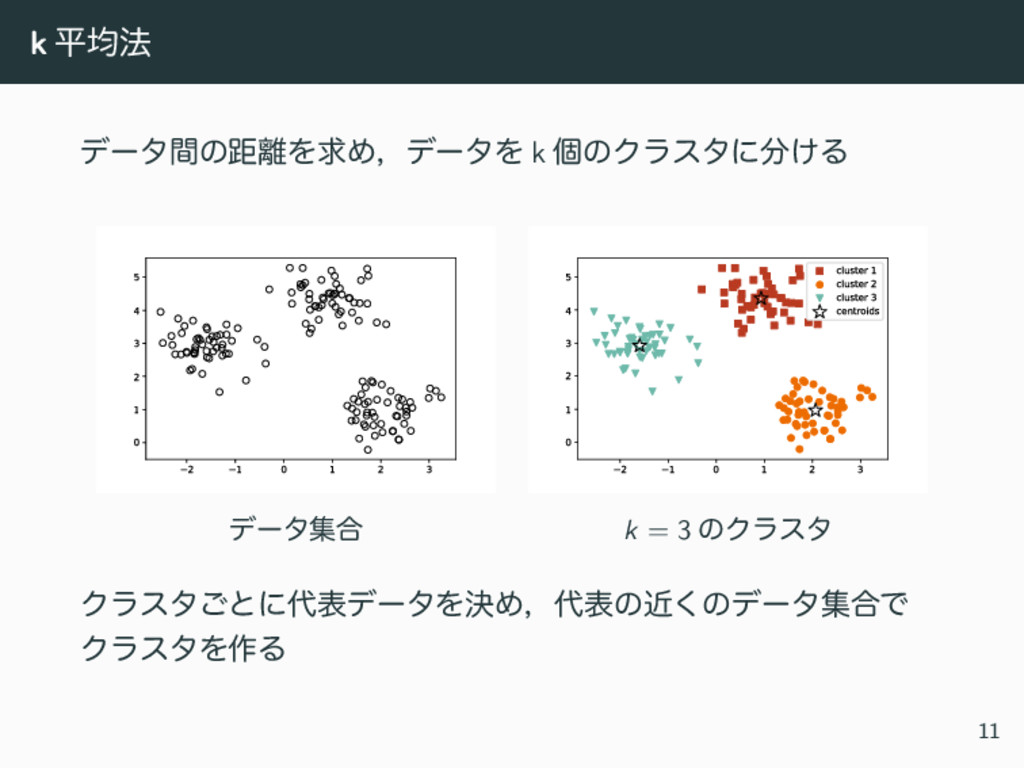
k ฏۉ๏ σʔλؒͷڑΛٻΊɼσʔλΛ k ݸͷΫϥελʹ͚Δ −2 −1 0 1 2
3 0 1 2 3 4 5 σʔλू߹ −2 −1 0 1 2 3 0 1 2 3 4 5 cluster 1 cluster 2 cluster 3 centroids k = 3 ͷΫϥελ Ϋϥελ͝ͱʹදσʔλΛܾΊɼදͷۙ͘ͷσʔλू߹Ͱ ΫϥελΛ࡞Δ 11
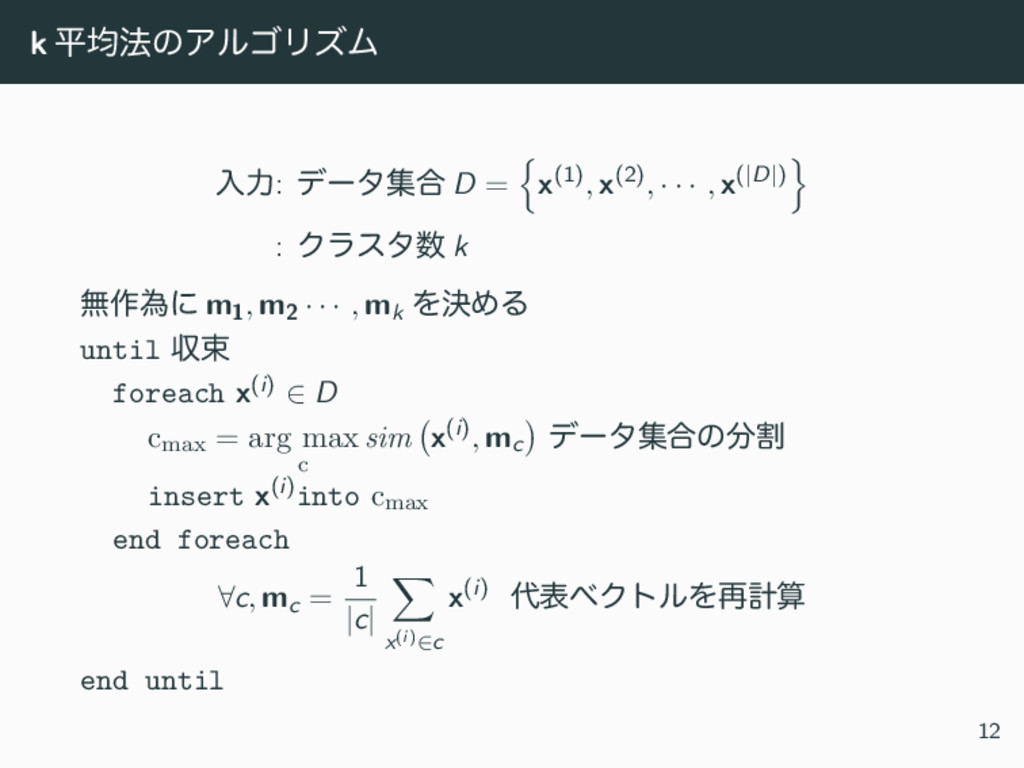
k ฏۉ๏ͷΞϧΰϦζϜ ೖྗ: σʔλू߹ D = { x(1), x(2), ·
· · , x(|D|) } : Ϋϥελ k ແ࡞ҝʹ m1, m2 · · · , mk ΛܾΊΔ until ऩଋ foreach x(i) ∈ D cmax = arg max c sim ( x(i), mc ) σʔλू߹ͷׂ insert x(i)into cmax end foreach ∀c, mc = 1 |c| ∑ x(i)∈c x(i) දϕΫτϧΛ࠶ܭࢉ end until 12
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}