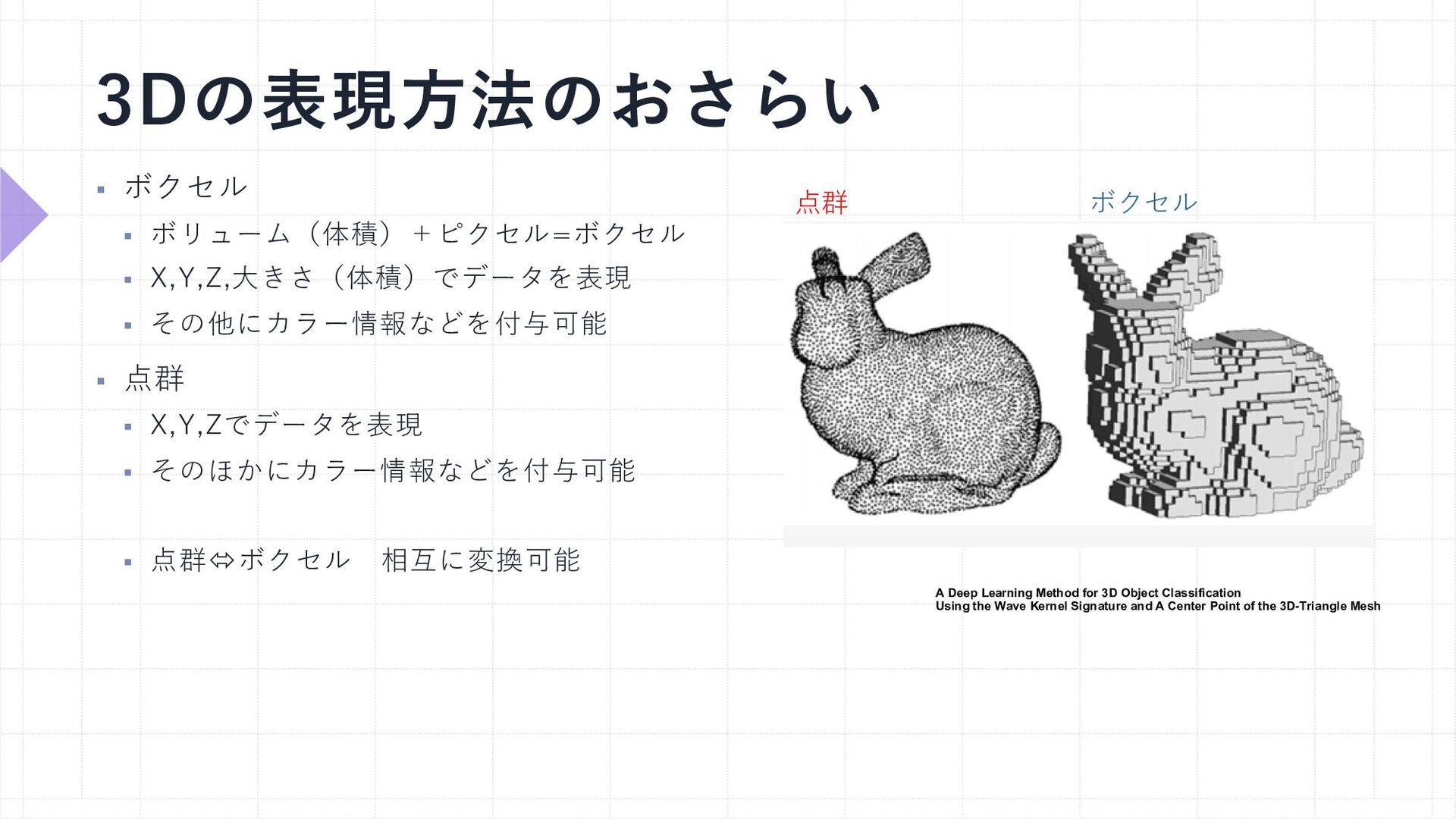
点群 § X,Y,Zでデータを表現 § そのほかにカラー情報などを付与可能 § 点群óボクセル 相互に変換可能 A Deep Learning Method for 3D Object Classification Using the Wave Kernel Signature and A Center Point of the 3D-Triangle Mesh 点群 ボクセル
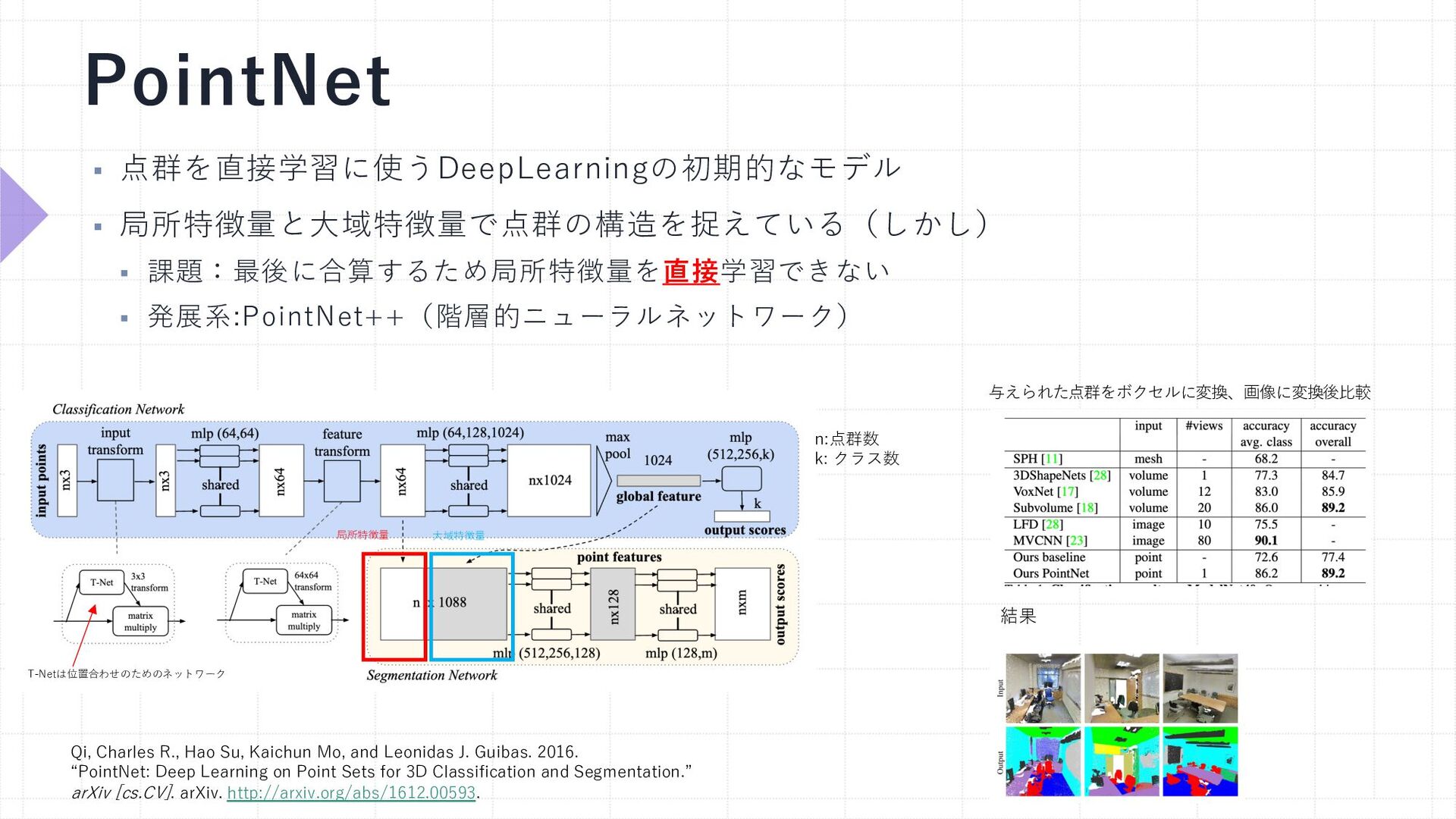
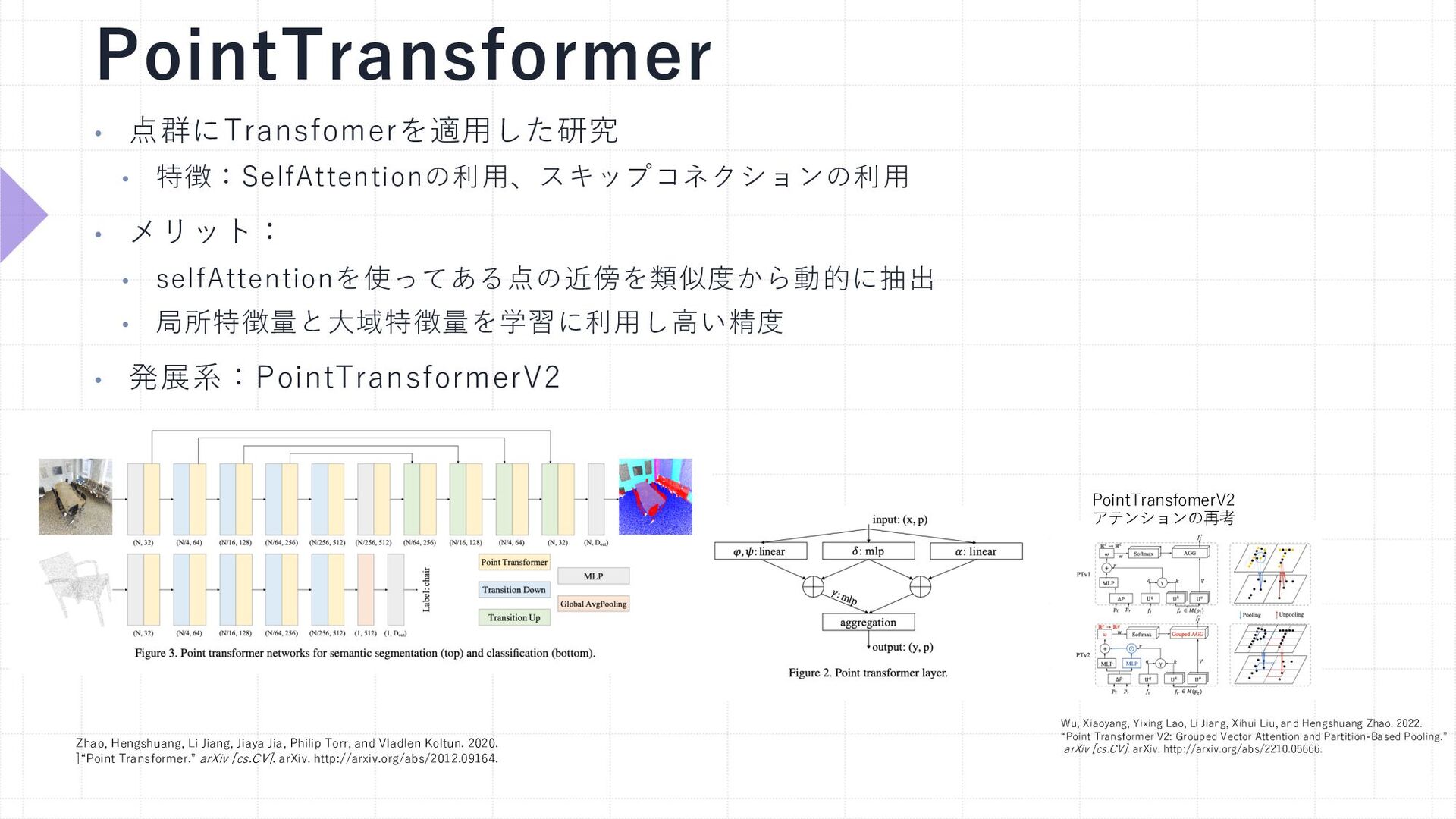
k: クラス数 Qi, Charles R., Hao Su, Kaichun Mo, and Leonidas J. Guibas. 2016. “PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation.” arXiv [cs.CV]. arXiv. http://arxiv.org/abs/1612.00593. 局所特徴量 ⼤域特徴量 結果 与えられた点群をボクセルに変換、画像に変換後⽐較 T-Netは位置合わせのためのネットワーク
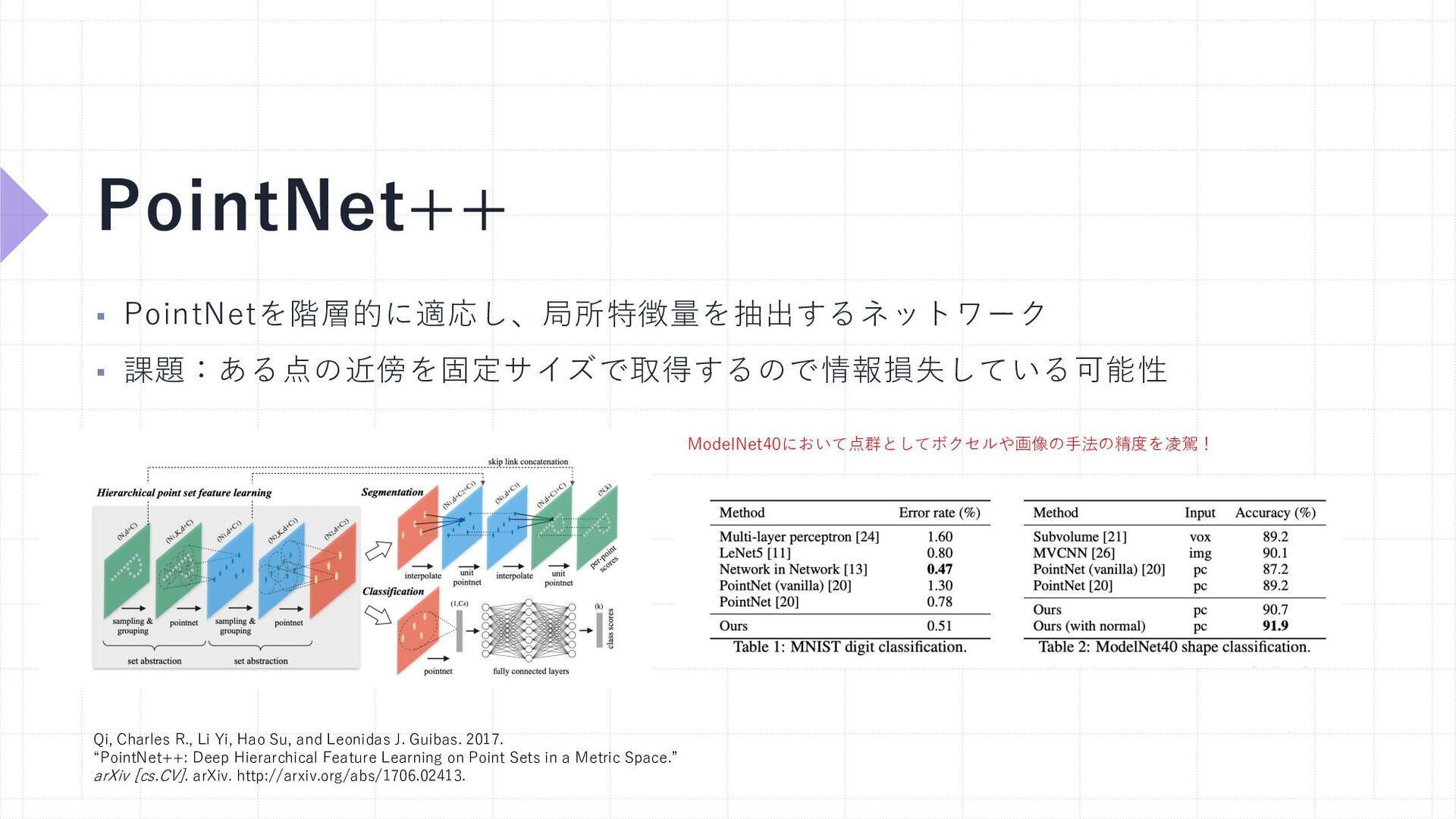
Hao Su, and Leonidas J. Guibas. 2017. “PointNet++: Deep Hierarchical Feature Learning on Point Sets in a Metric Space.” arXiv [cs.CV]. arXiv. http://arxiv.org/abs/1706.02413. ModelNet40において点群としてボクセルや画像の⼿法の精度を凌駕!
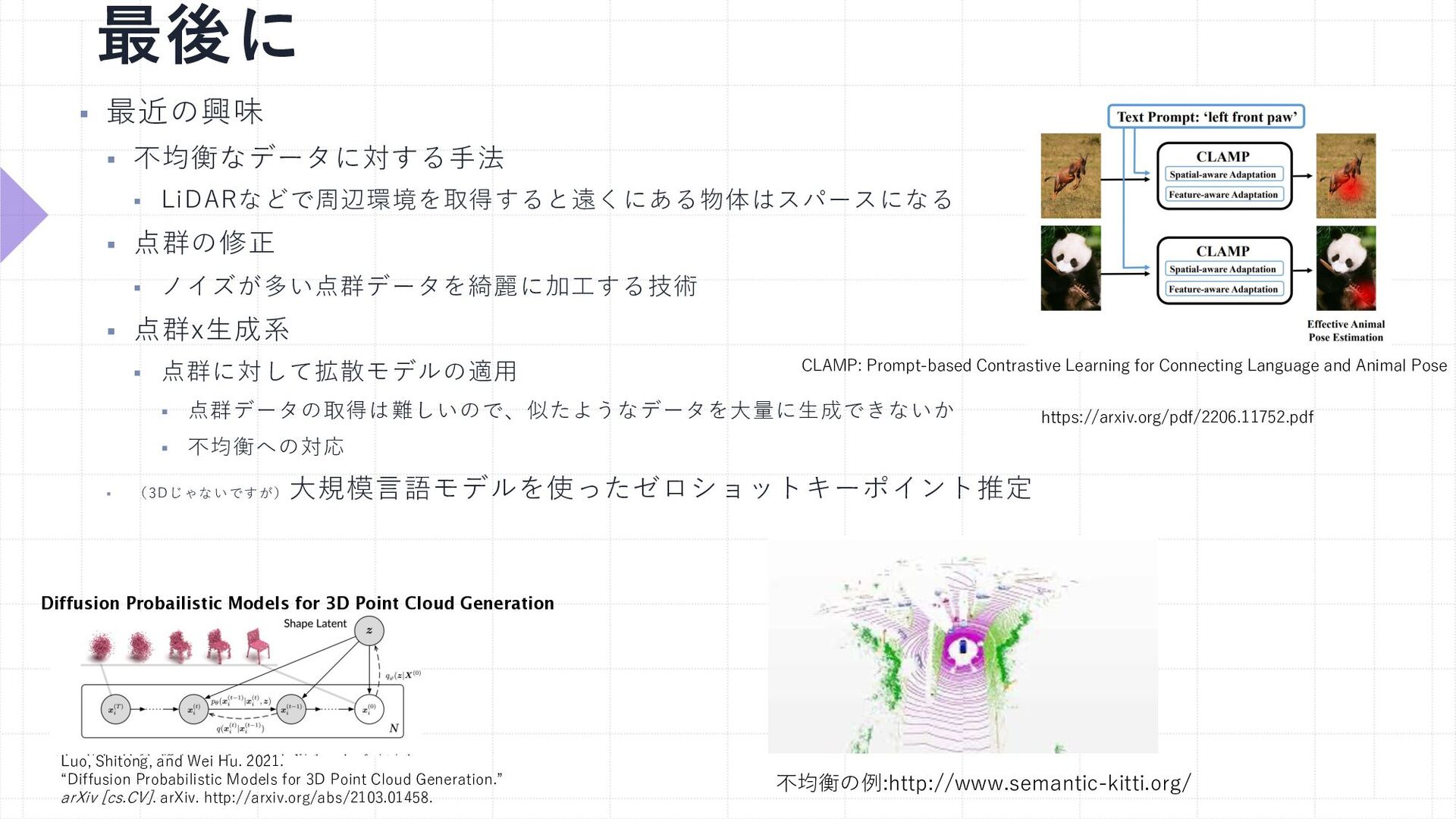
ノイズが多い点群データを綺麗に加⼯する技術 § 点群x⽣成系 § 点群に対して拡散モデルの適⽤ § 点群データの取得は難しいので、似たようなデータを⼤量に⽣成できないか § 不均衡への対応 § (3Dじゃないですが) ⼤規模⾔語モデルを使ったゼロショットキーポイント推定 不均衡の例:http://www.semantic-kitti.org/ Diffusion Probailistic Models for 3D Point Cloud Generation Luo, Shitong, and Wei Hu. 2021. “Diffusion Probabilistic Models for 3D Point Cloud Generation.” arXiv [cs.CV]. arXiv. http://arxiv.org/abs/2103.01458. https://arxiv.org/pdf/2206.11752.pdf CLAMP: Prompt-based Contrastive Learning for Connecting Language and Animal Pose
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}