Комбинация Visual Odometry (оценки траектории камеры), Mapping (построения карты), Visual Localization (локализация по карте) и Loop Closure Пример карты Карта и траектория
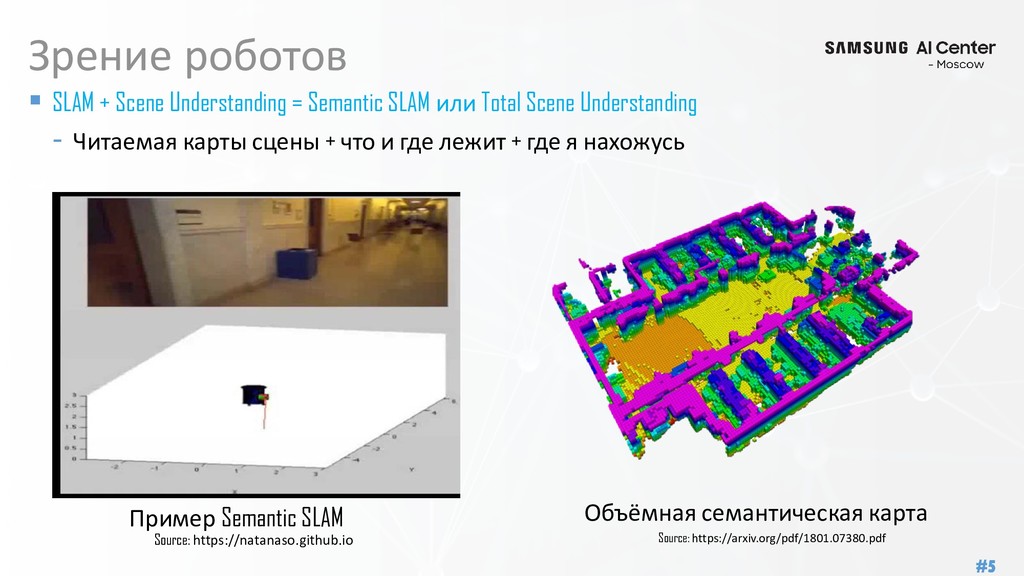
SLAM или Total Scene Understanding - Читаемая карты сцены + что и где лежит + где я нахожусь Пример Semantic SLAM Объёмная семантическая карта Source: https://arxiv.org/pdf/1801.07380.pdf Source: https://natanaso.github.io
часть аспектов задачи Реальные очень ограничены, синтетические большие, но всё равно «не полны» TUM SLAM Dataset Source: http://suncg.cs.princeton.edu/ SUN CG Dataset. 45K сцен
чаще всего представлена ключевыми кадрами и облаком точек. Никто не знает, как оценивать качество таких «карт» Оцениваем траектории, но не карты –> нет стыковки с планированием / управлением Плотное облако точек + траектория камеры Карта занятости Векторная карта с метками
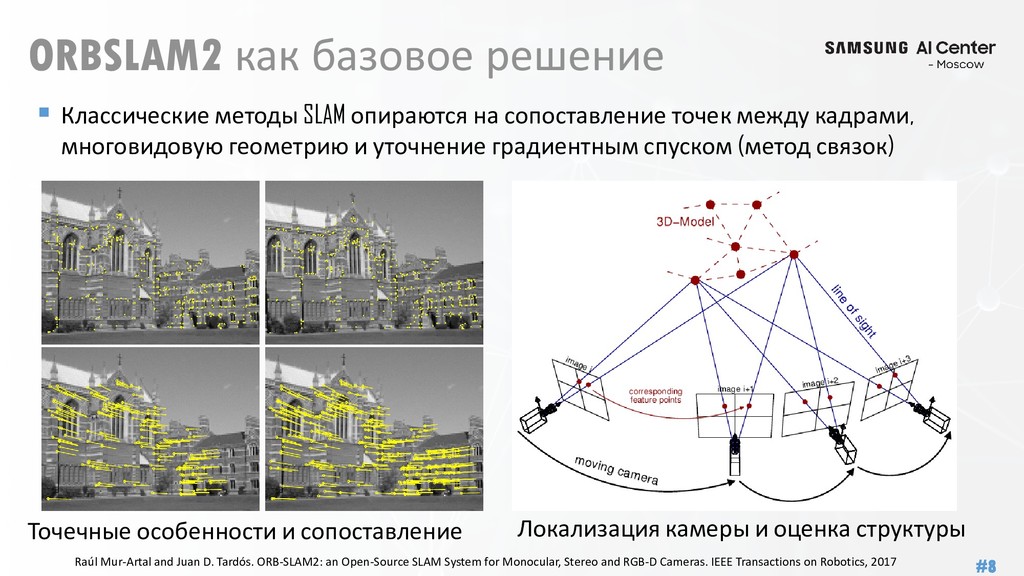
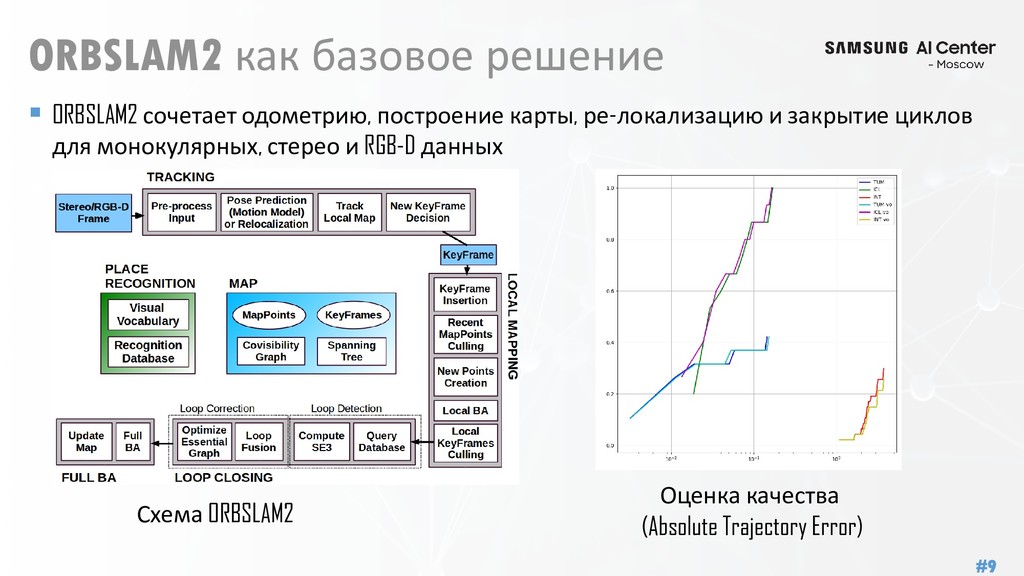
на сопоставление точек между кадрами, многовидовую геометрию и уточнение градиентным спуском (метод связок) Точечные особенности и сопоставление Локализация камеры и оценка структуры Raúl Mur-Artal and Juan D. Tardós. ORB-SLAM2: an Open-Source SLAM System for Monocular, Stereo and RGB-D Cameras. IEEE Transactions on Robotics, 2017
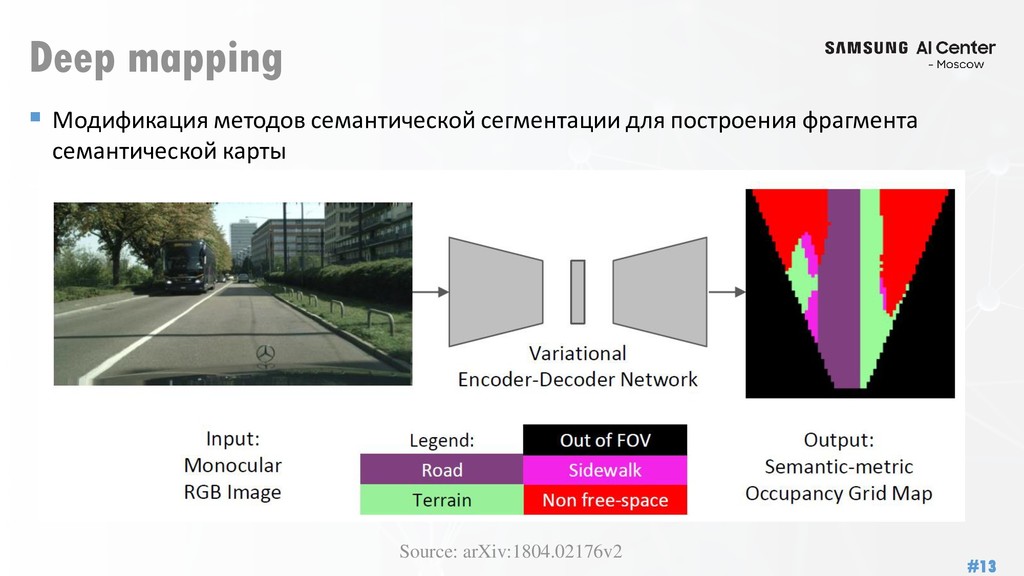
- Deep Visual Odometry • 2 x RGB/RGBD -> оценка смещения и поворота камеры - Deep Mapping • RGB/RGBD -> Кусок карты видимой части сцены или всей карты - Deep Camera Localization • RGB/RGBD + Map/Set of images -> Положение камеры в сцене - Deep Odometry + Mapping • Поток RGB/RGBD -> траектория камеры + какая-то форма карты
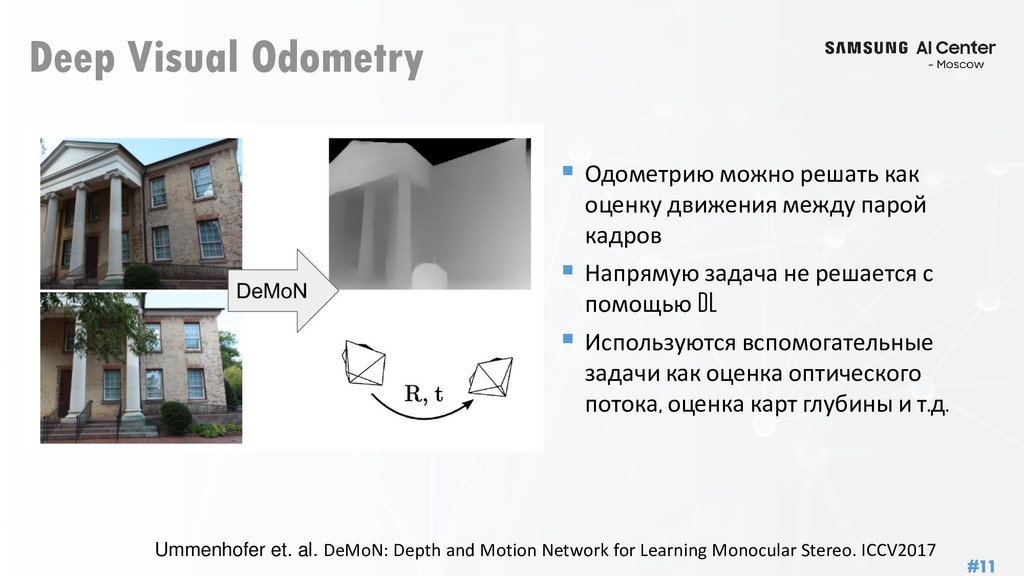
движения между парой кадров Напрямую задача не решается с помощью DL Используются вспомогательные задачи как оценка оптического потока, оценка карт глубины и т.д. Ummenhofer et. al. DeMoN: Depth and Motion Network for Learning Monocular Stereo. ICCV2017
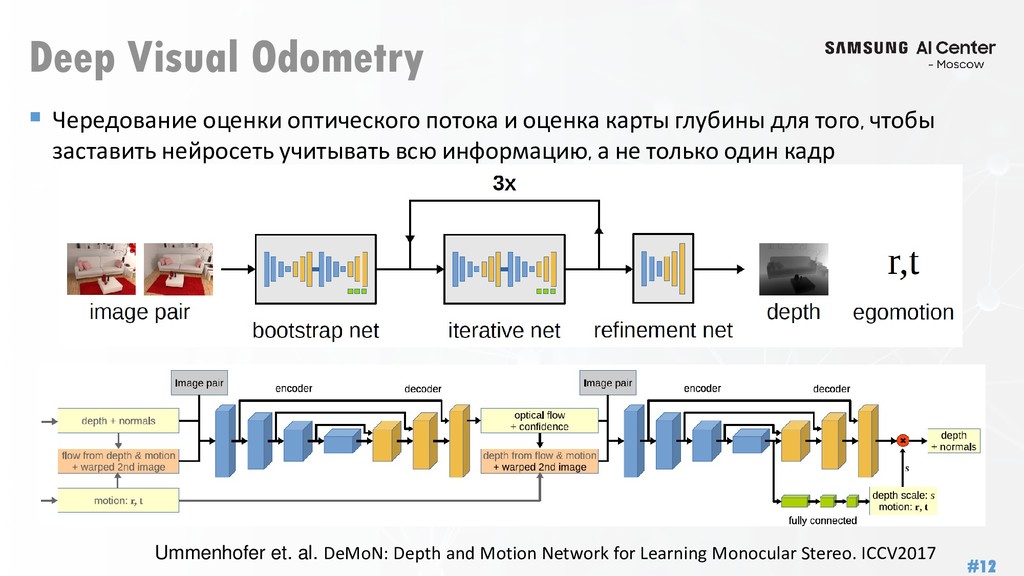
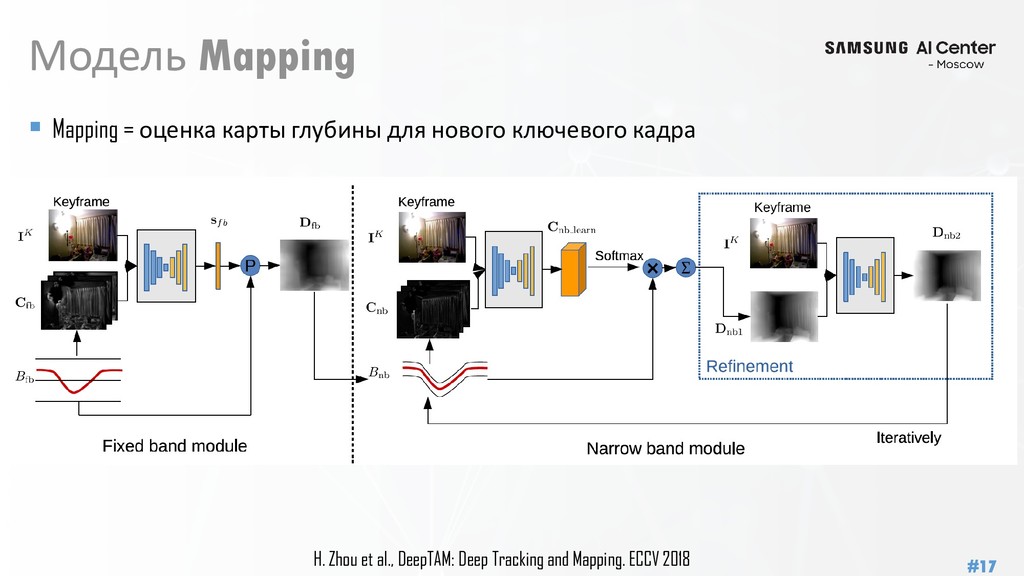
оценка карты глубины для того, чтобы заставить нейросеть учитывать всю информацию, а не только один кадр Ummenhofer et. al. DeMoN: Depth and Motion Network for Learning Monocular Stereo. ICCV2017
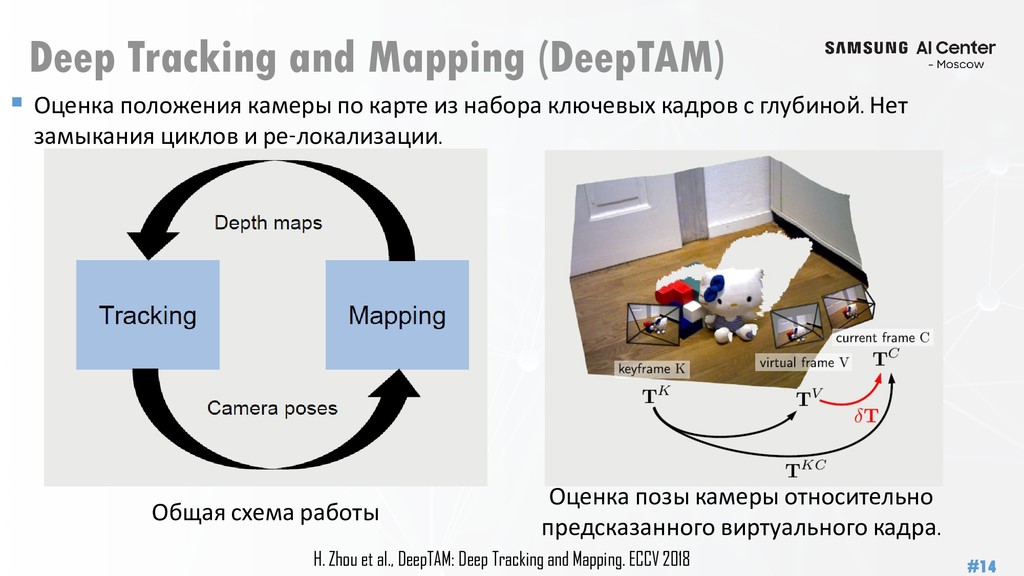
по карте из набора ключевых кадров с глубиной. Нет замыкания циклов и ре-локализации. Общая схема работы Оценка позы камеры относительно предсказанного виртуального кадра. H. Zhou et al., DeepTAM: Deep Tracking and Mapping. ECCV 2018
качества. Методы оцениваются в основном по траекториями или вспомогательным задачам, пр. оценка глубины. Обучающие данные для Semantic SLAM будут в основном синтезироваться, что повышает важность развития методов для обучения на разнородных данных, улучшения качества синтеза и повышение их разнообразия Предложены нейросетевые методы для решения отдельных задач, но пока нет единых, end-to-end обучаемых системы, по крайней мере для «домашних» роботов.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}