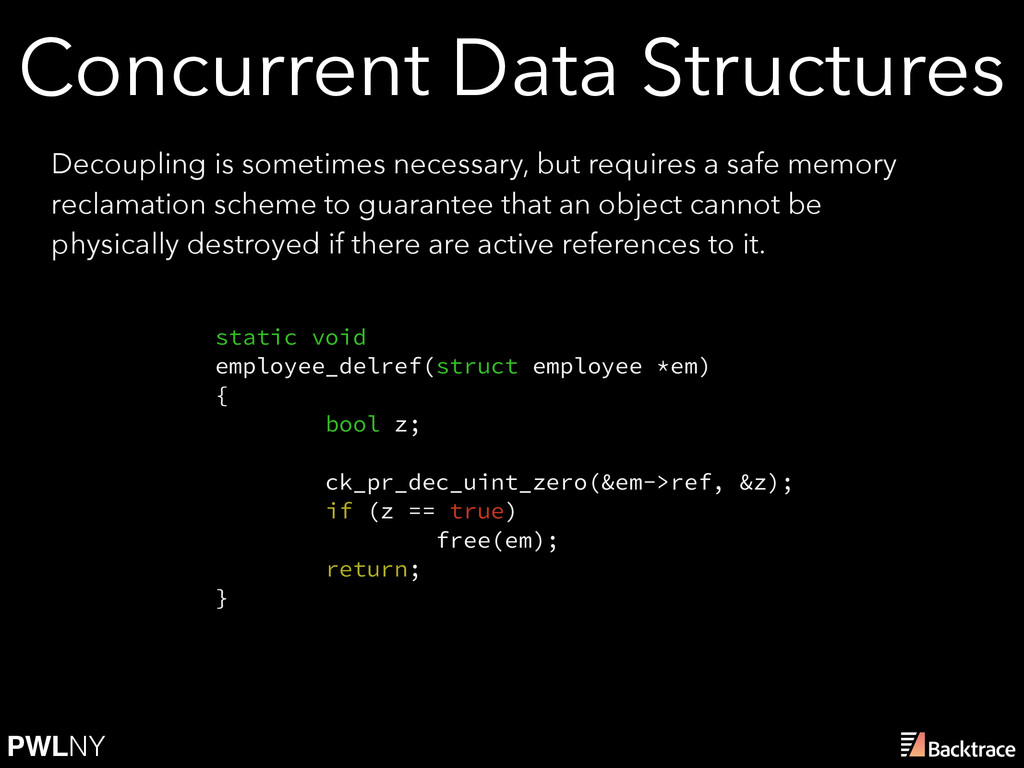
Multicore systems are ubiquitous but modern concurrent programming techniques still do not see wide-spread adoption. Most concurrent software (developed in low-level languages) still relies on error-prone and unscalable memory management techniques for correctness despite the introduction of superior methods over 30 years ago. Safe memory reclamation allows for performant and robust memory management that is also suitable for advanced concurrent programming techniques such as non-blocking synchronization. If properly used, safe memory reclamation techniques allow improved performance and simplicity without the complexity of full-blown garbage collection.
This paper provides a terrific overview of common safe memory reclamation mechanisms and then explores their performance implications. In this talk, I will do the same but with stronger emphasis on the introductory aspects of safe memory reclamation and contrast with a refreshed performance analysis.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
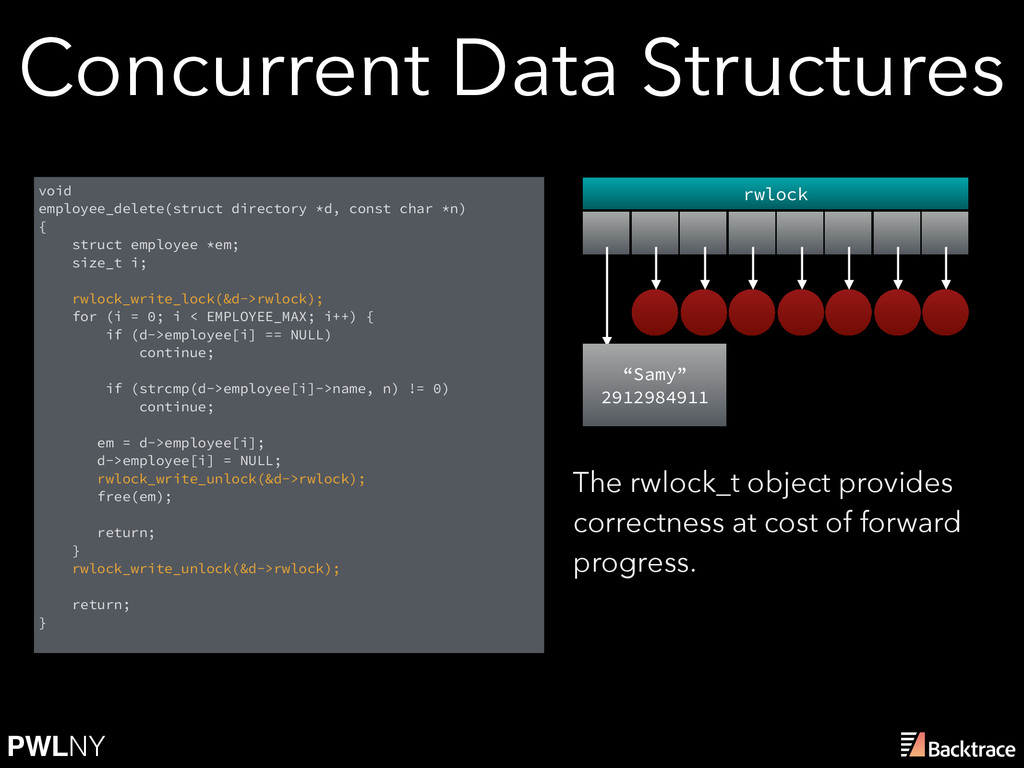
![PWLNY Concurrent Data Structures […] concurrently-readable synchronization […] uses locks](https://files.speakerdeck.com/presentations/d1a30c984a33480183f056b9ef6115d3/slide_20.jpg){kind=link}
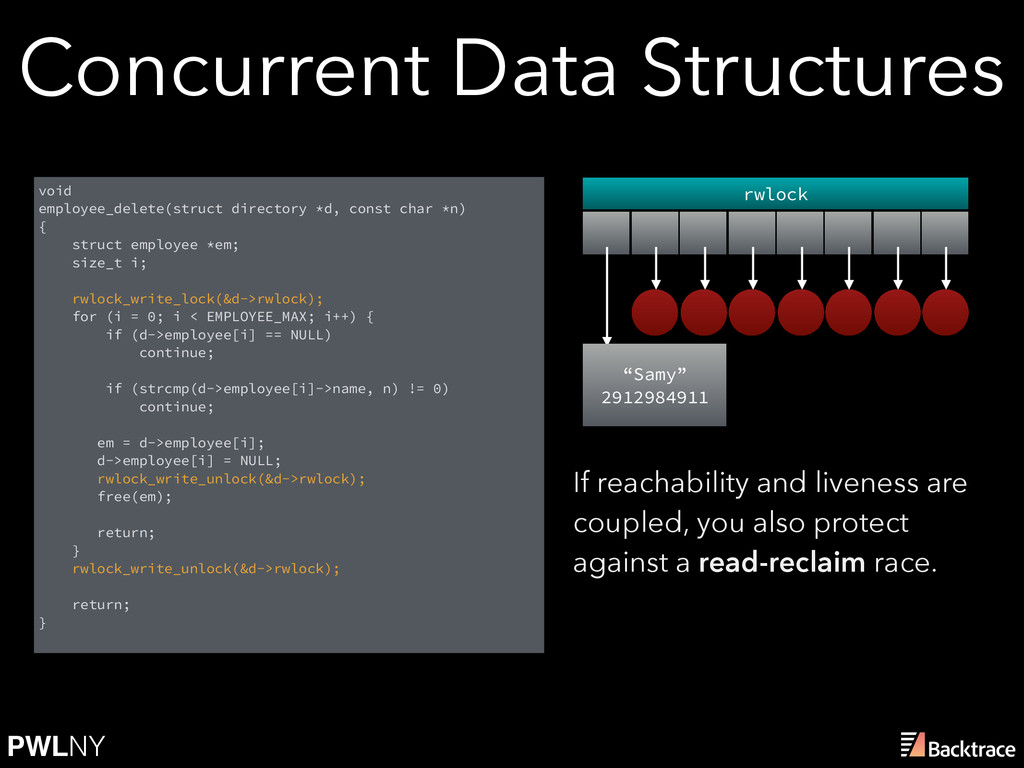
![PWLNY Concurrent Data Structures […] concurrently-readable synchronization […] uses locks](https://files.speakerdeck.com/presentations/d1a30c984a33480183f056b9ef6115d3/slide_21.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![PWLNY HAZARD POINTERS employee_number_delete […] ck_pr_store_ptr(slot, NULL); ck_pr_fence_memory(); defer(em); […]](https://files.speakerdeck.com/presentations/d1a30c984a33480183f056b9ef6115d3/slide_32.jpg){kind=link}
![PWLNY HAZARD POINTERS employee_number_delete […] ck_pr_store_ptr(slot, NULL); ck_pr_fence_memory(); defer(em); […]](https://files.speakerdeck.com/presentations/d1a30c984a33480183f056b9ef6115d3/slide_33.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![PWLNY QUIESCENT-STATE-BASED RECLAMATION employee_number_delete […] ck_pr_store_ptr(slot, NULL); qsbr_synchronize(); free(em); […]](https://files.speakerdeck.com/presentations/d1a30c984a33480183f056b9ef6115d3/slide_38.jpg){kind=link}
{kind=link}
{kind=link}
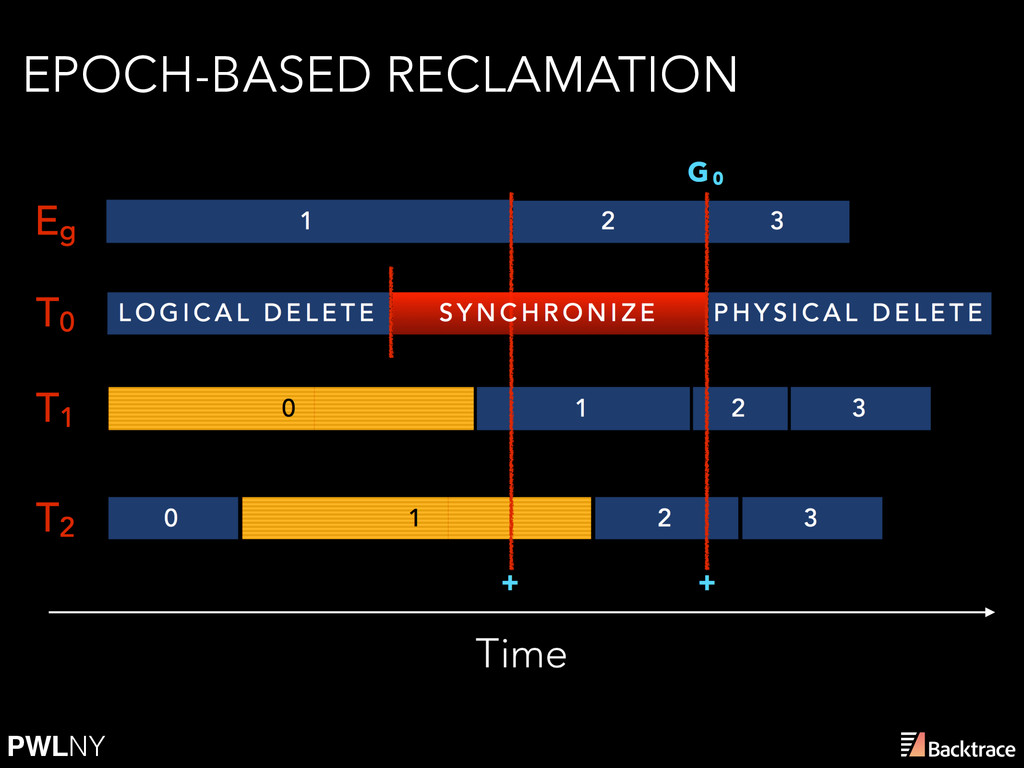
![PWLNY EPOCH-BASED RECLAMATION Fraser’s EBR [6] follows QSBR in using](https://files.speakerdeck.com/presentations/d1a30c984a33480183f056b9ef6115d3/slide_41.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}