transfert en phase et en amplitude Bruit instrumental Difficulté avec le bruit instrumental : Inférieur au Peterson NLNM Mesure capteur bloqué impossible Méthodes de calcul Avec 2 capteurs Avec 3 capteurs OCTOBRE 12, 2015 | PAGE 2 CEA | 12 Octobre 2015 -5 -4 -3 -2 -1 0 1 0,1 1 10 dB Ref Sensibilité en V/m/s Fréquence en Hz 0 90 180 0,1 1 10 Phase en degrés Fréquence en Hz Mesure délicate
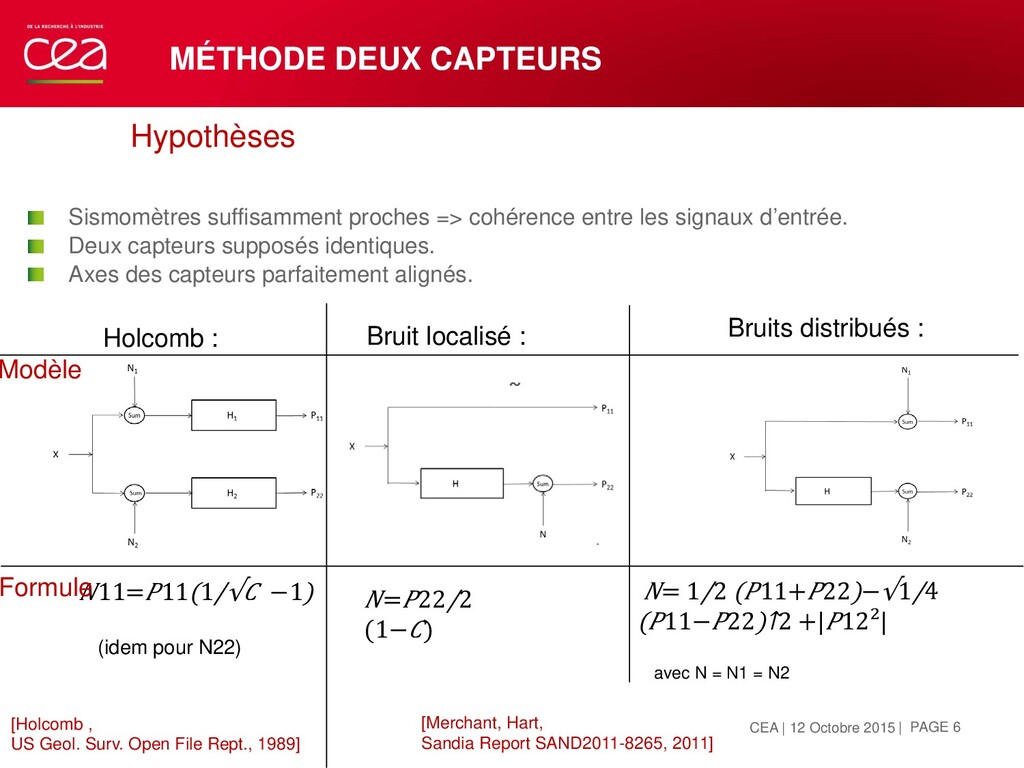
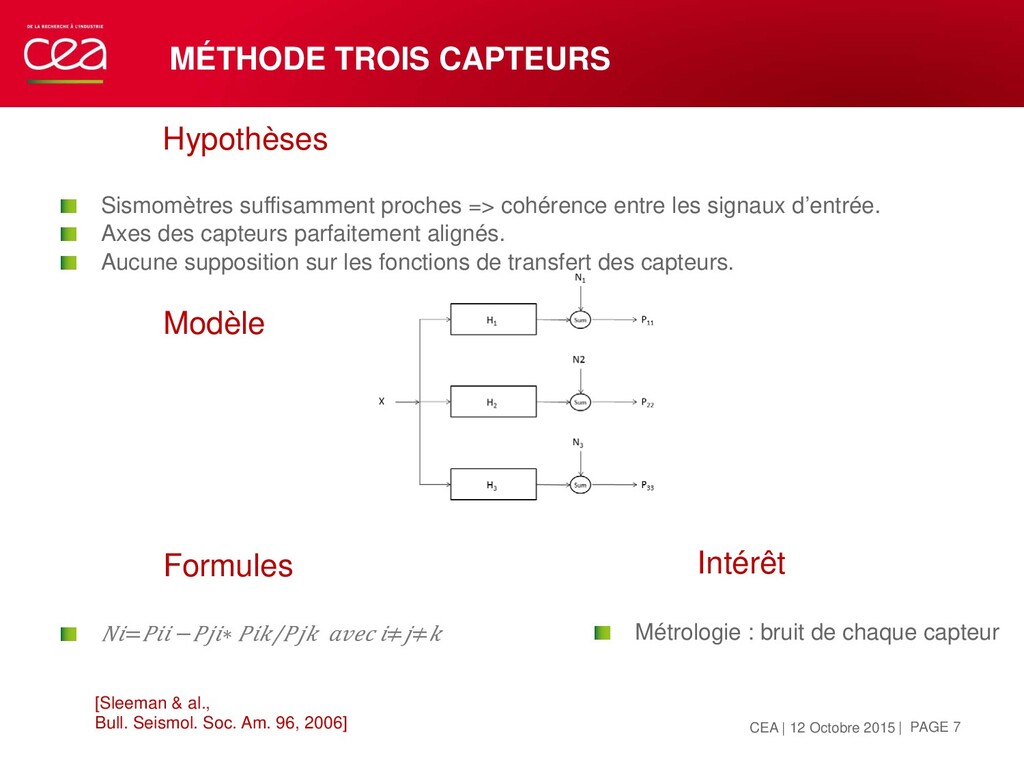
Métrologie : bruit de chaque capteur Hypothèses Sismomètres suffisamment proches => cohérence entre les signaux d’entrée. Axes des capteurs parfaitement alignés. Aucune supposition sur les fonctions de transfert des capteurs. Modèle Formules = −∗ / ≠≠ [Sleeman & al., Bull. Seismol. Soc. Am. 96, 2006] CEA | 12 Octobre 2015
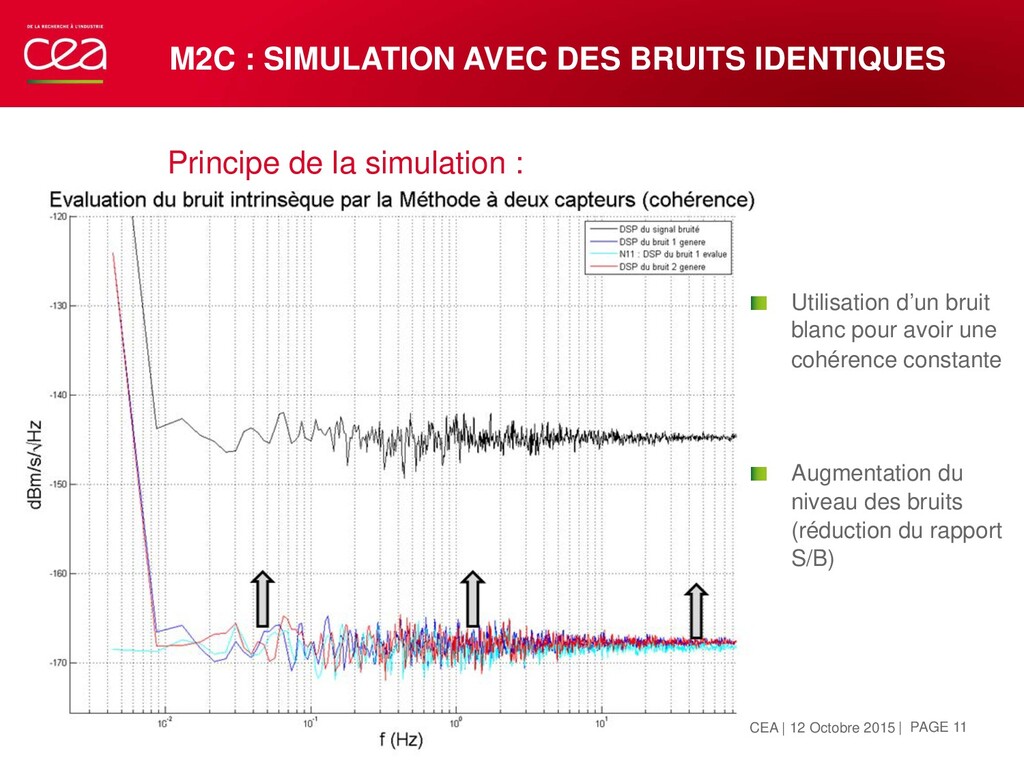
simulation : OCTOBRE 12, 2015 | PAGE 11 CEA | 12 Octobre 2015 Utilisation d’un bruit blanc pour avoir une cohérence constante Augmentation du niveau des bruits (réduction du rapport S/B)
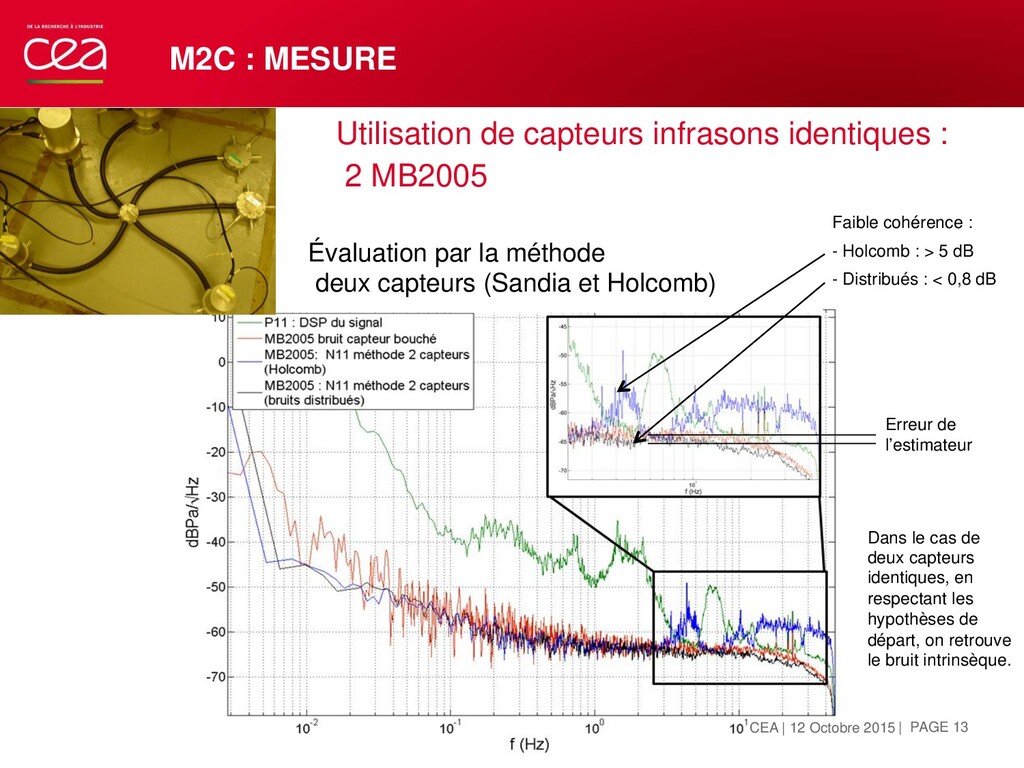
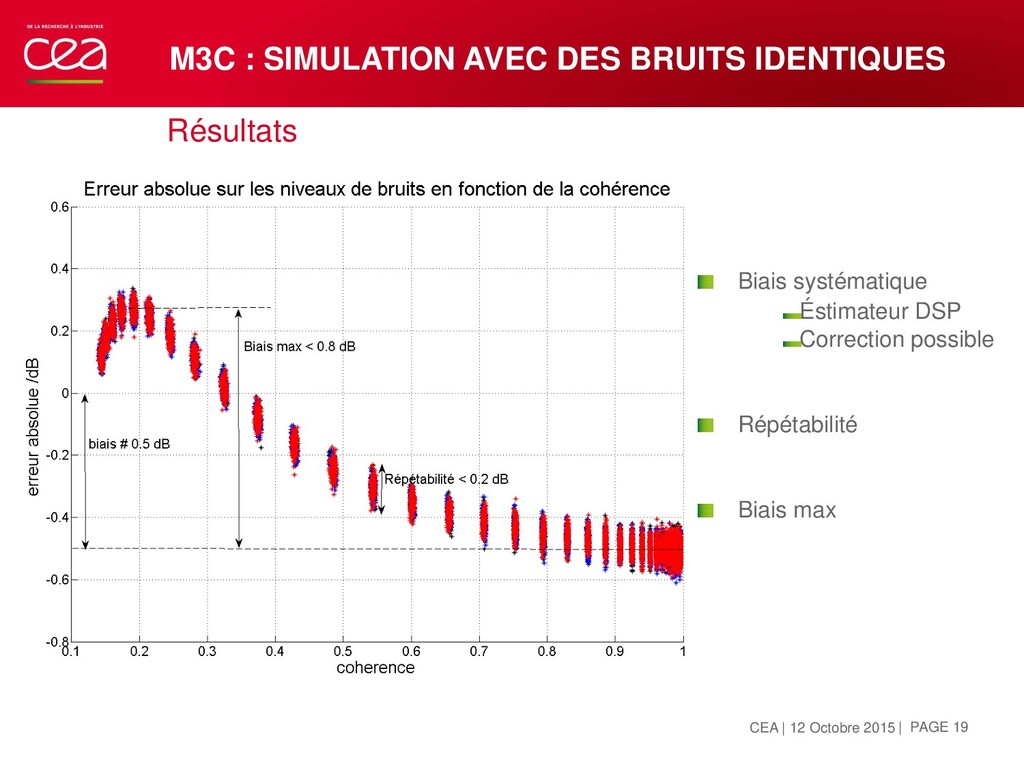
MESURE OCTOBRE 12, 2015 | PAGE 13 CEA | 12 Octobre 2015 Erreur de l’estimateur Dans le cas de deux capteurs identiques, en respectant les hypothèses de départ, on retrouve le bruit intrinsèque. Évaluation par la méthode deux capteurs (Sandia et Holcomb) Faible cohérence : - Holcomb : > 5 dB - Distribués : < 0,8 dB
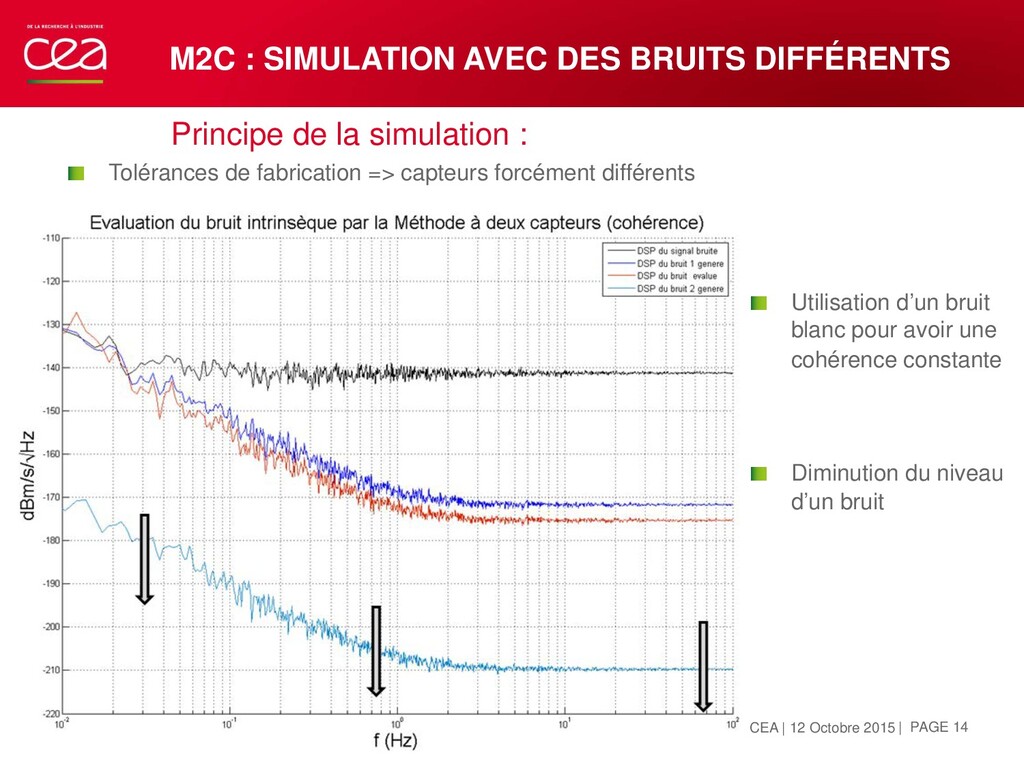
simulation : Tolérances de fabrication => capteurs forcément différents OCTOBRE 12, 2015 | PAGE 14 CEA | 12 Octobre 2015 Utilisation d’un bruit blanc pour avoir une cohérence constante Diminution du niveau d’un bruit
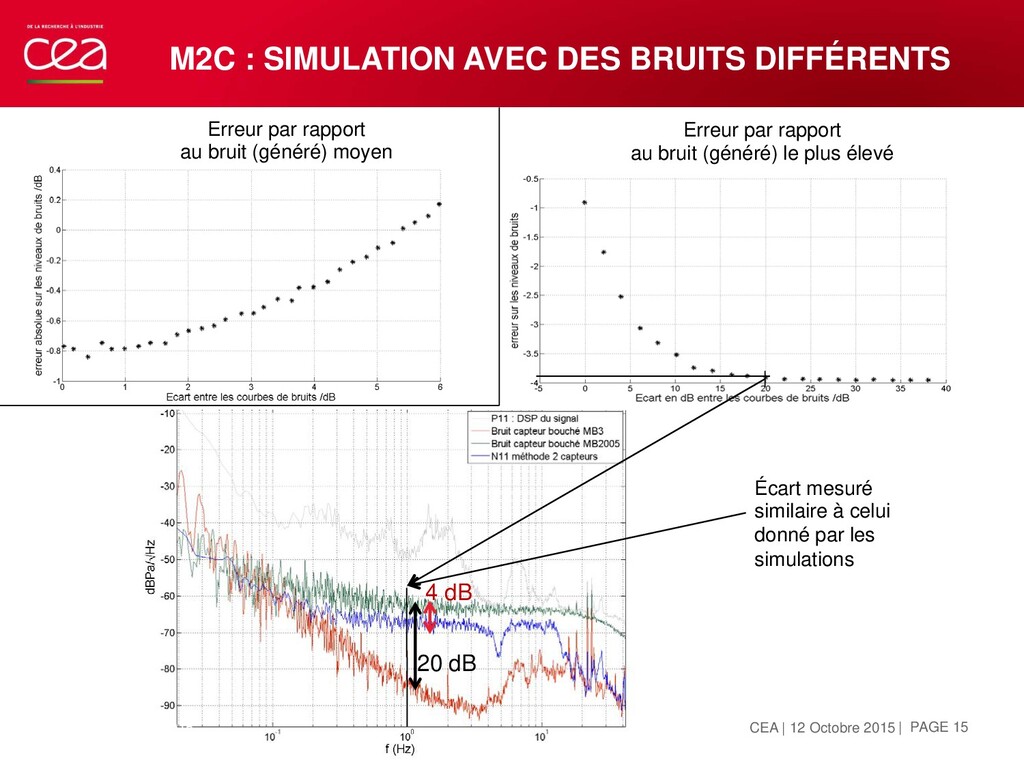
| PAGE 15 CEA | 12 Octobre 2015 Écart mesuré similaire à celui donné par les simulations 20 dB 4 dB Erreur par rapport au bruit (généré) moyen Erreur par rapport au bruit (généré) le plus élevé
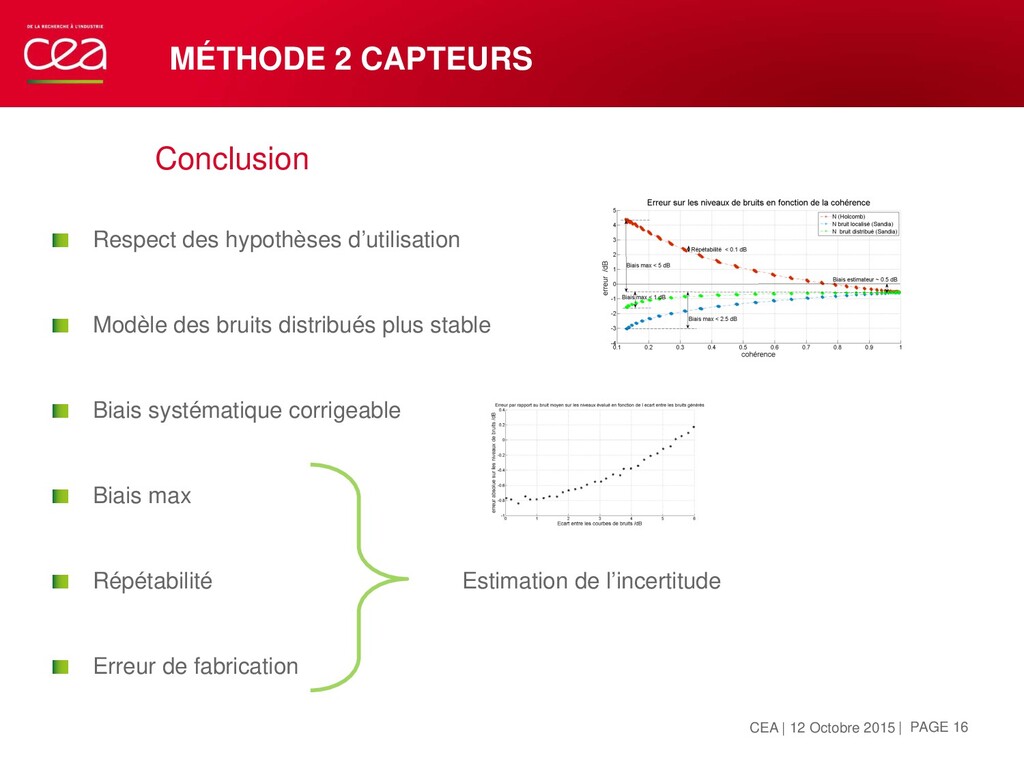
Modèle des bruits distribués plus stable Biais systématique corrigeable Biais max Répétabilité Estimation de l’incertitude Erreur de fabrication OCTOBRE 12, 2015 | PAGE 16 CEA | 12 Octobre 2015
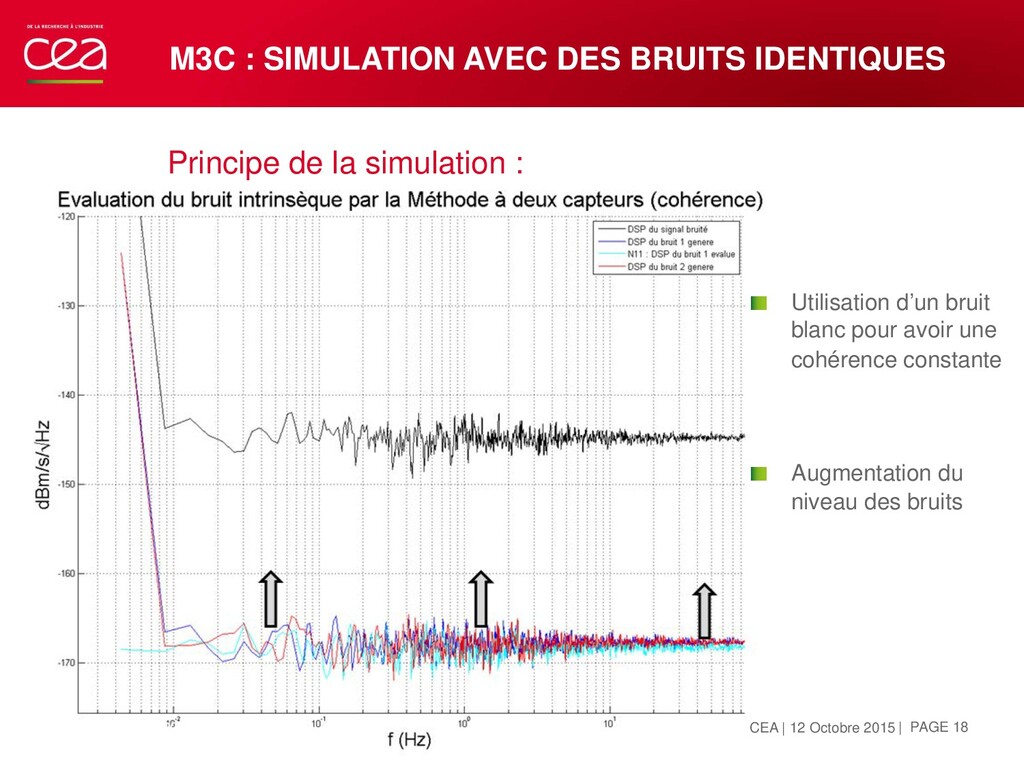
simulation : OCTOBRE 12, 2015 | PAGE 18 CEA | 12 Octobre 2015 Utilisation d’un bruit blanc pour avoir une cohérence constante Augmentation du niveau des bruits
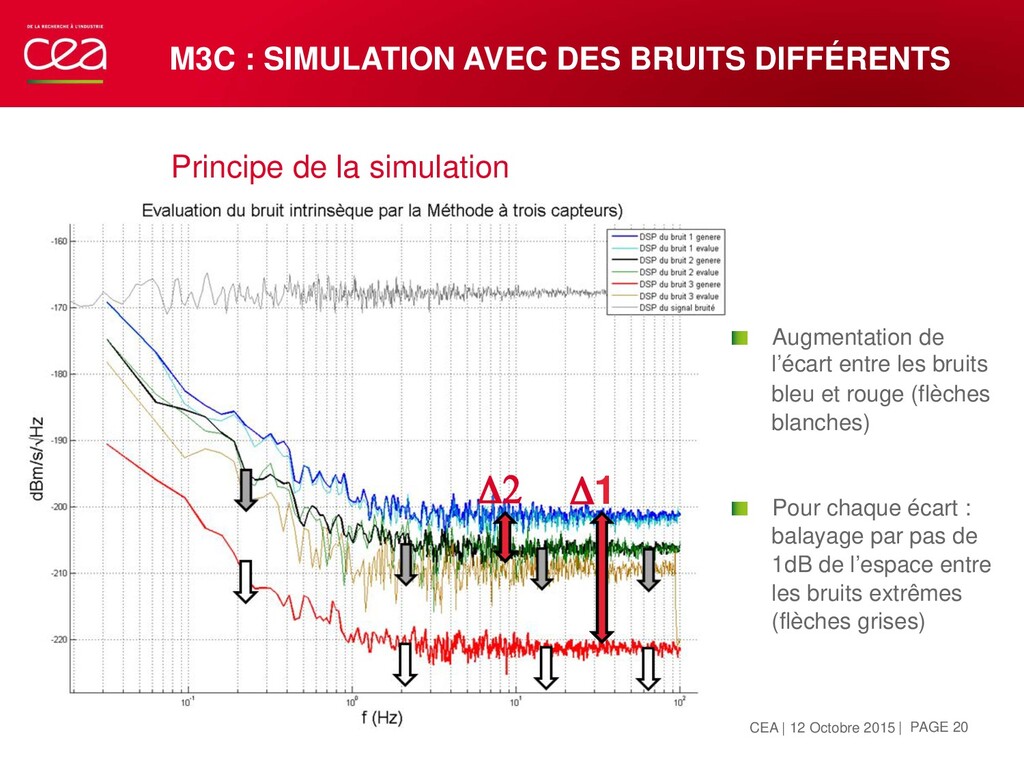
| PAGE 20 CEA | 12 Octobre 2015 Principe de la simulation Augmentation de l’écart entre les bruits bleu et rouge (flèches blanches) Pour chaque écart : balayage par pas de 1dB de l’espace entre les bruits extrêmes (flèches grises) Δ1 Δ2
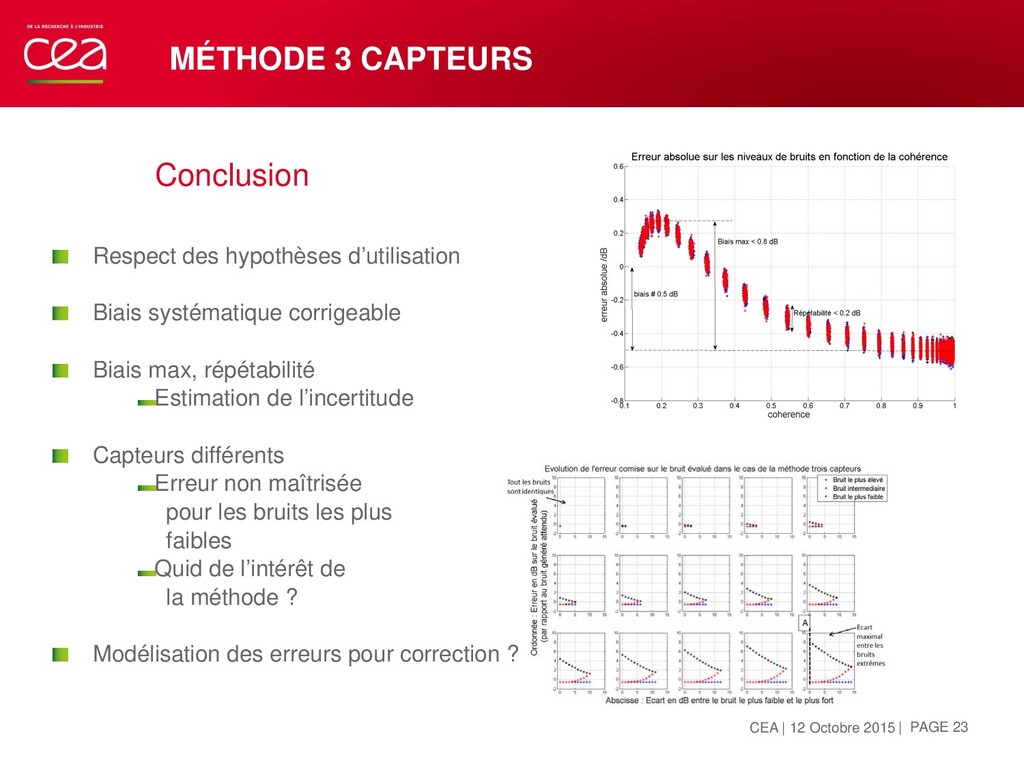
Biais systématique corrigeable Biais max, répétabilité Estimation de l’incertitude Capteurs différents Erreur non maîtrisée pour les bruits les plus faibles Quid de l’intérêt de la méthode ? Modélisation des erreurs pour correction ? OCTOBRE 12, 2015 | PAGE 23 CEA | 12 Octobre 2015
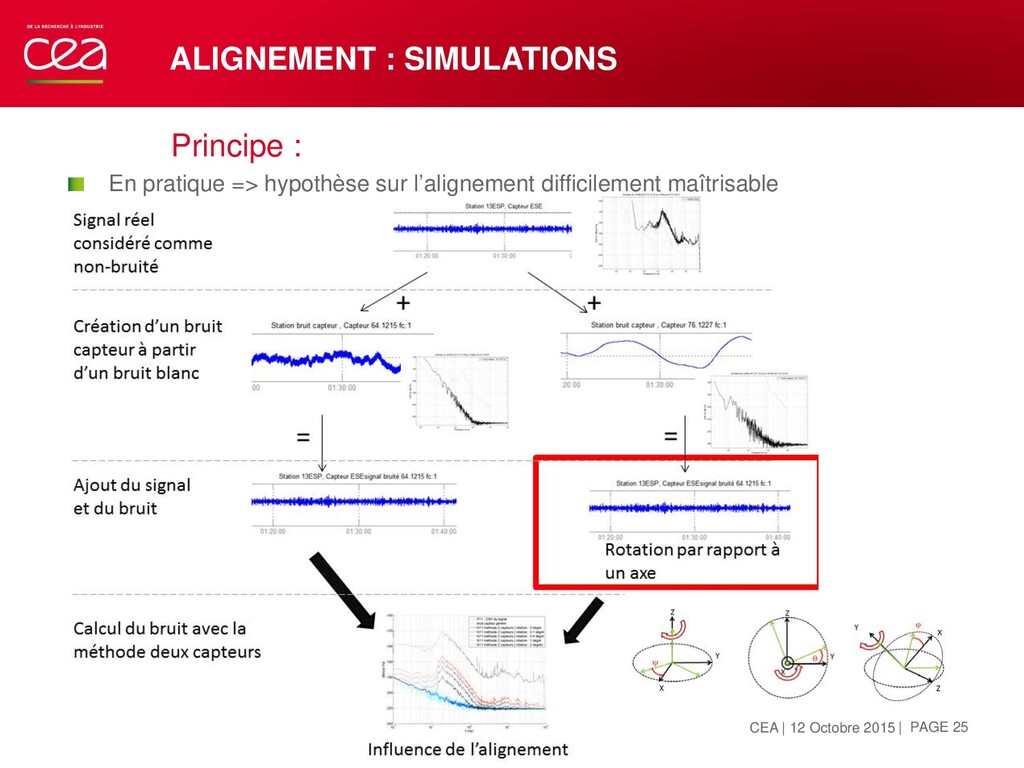
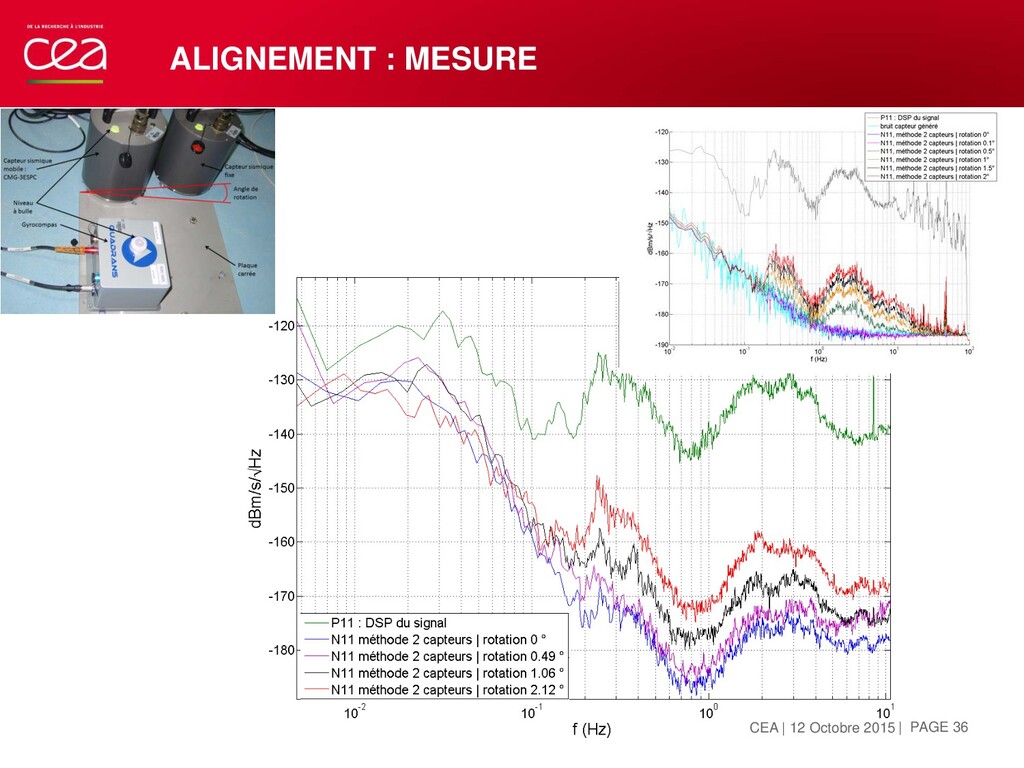
Effet de l’alignement dès 0,5 ° dans ce cas Défaut d’alignement de 2 ° 15 dB à 0,3 Hz Dépendance au niveau de bruit Prévoir une correction CEA | 12 Octobre 2015
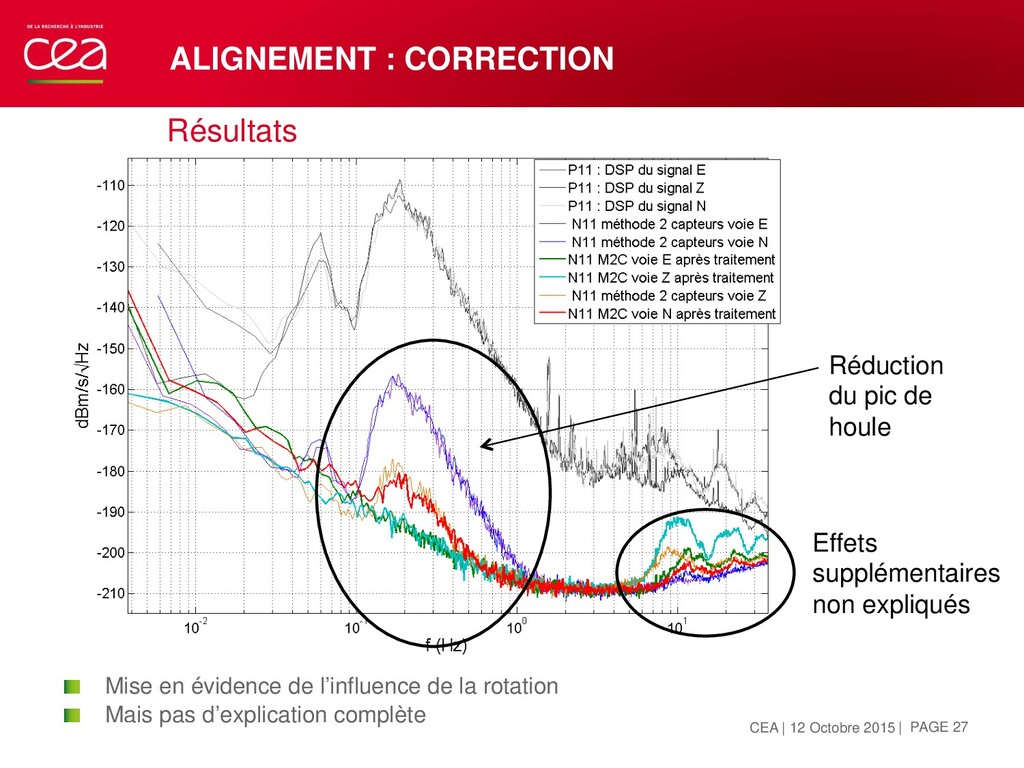
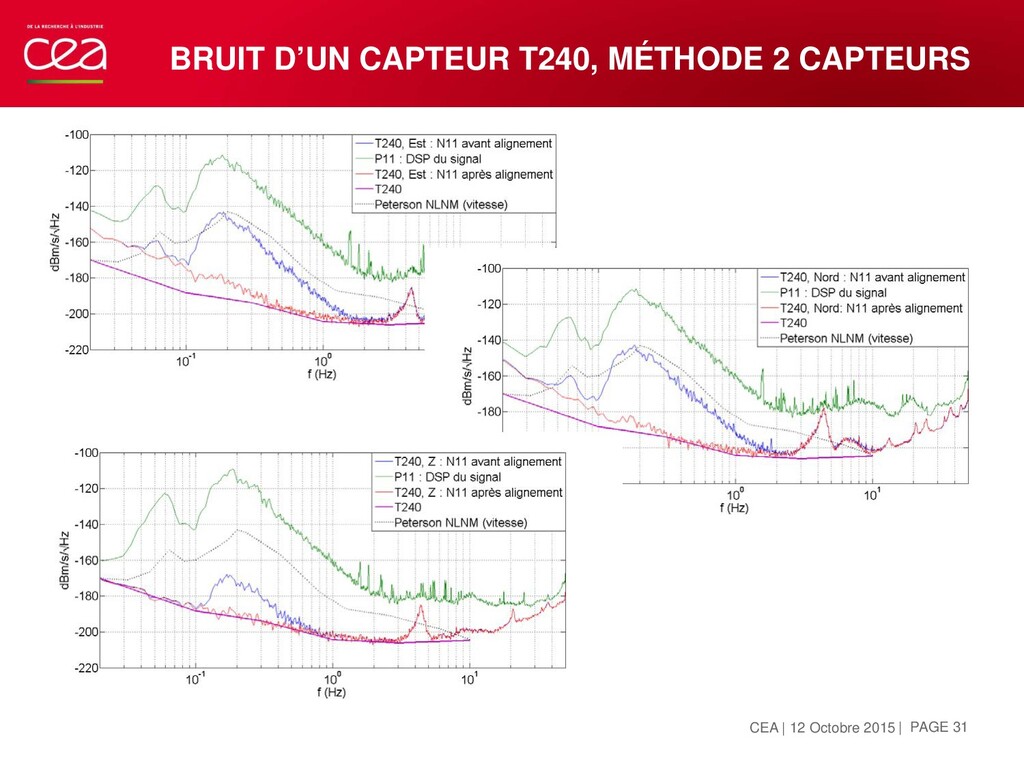
Mais pas d’explication complète ALIGNEMENT : CORRECTION OCTOBRE 12, 2015 | PAGE 27 CEA | 12 Octobre 2015 Effets supplémentaires non expliqués Réduction du pic de houle
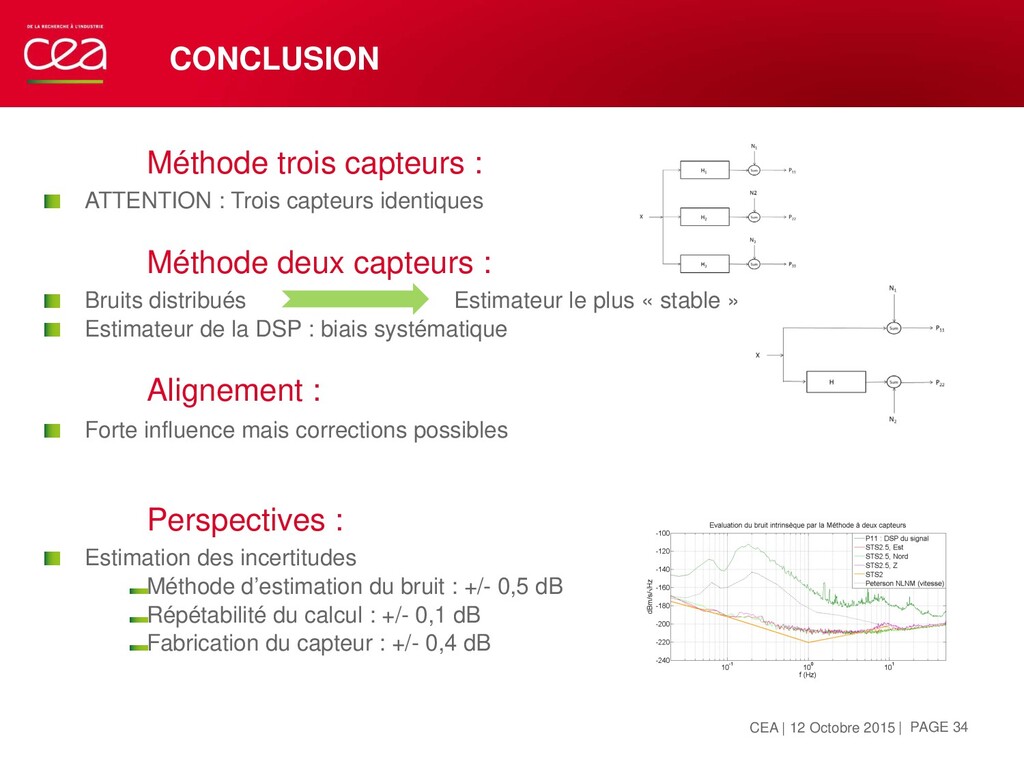
identiques Méthode deux capteurs : Bruits distribués Estimateur le plus « stable » Estimateur de la DSP : biais systématique Alignement : Forte influence mais corrections possibles Perspectives : Estimation des incertitudes Méthode d’estimation du bruit : +/- 0,5 dB Répétabilité du calcul : +/- 0,1 dB Fabrication du capteur : +/- 0,4 dB OCTOBRE 12, 2015 | PAGE 34 CEA | 12 Octobre 2015
alternatives Centre DAM Ile de France | 91297 ARPAJON CEDEX T. +33 (0)1 69 26 50 88 Etablissement public à caractère industriel et commercial | R.C.S Paris B 775 685 019 OCTOBRE 12, 2015 | PAGE 35 CEA | 10 AVRIL 2012 MERCI DE VOTRE ATTENTION
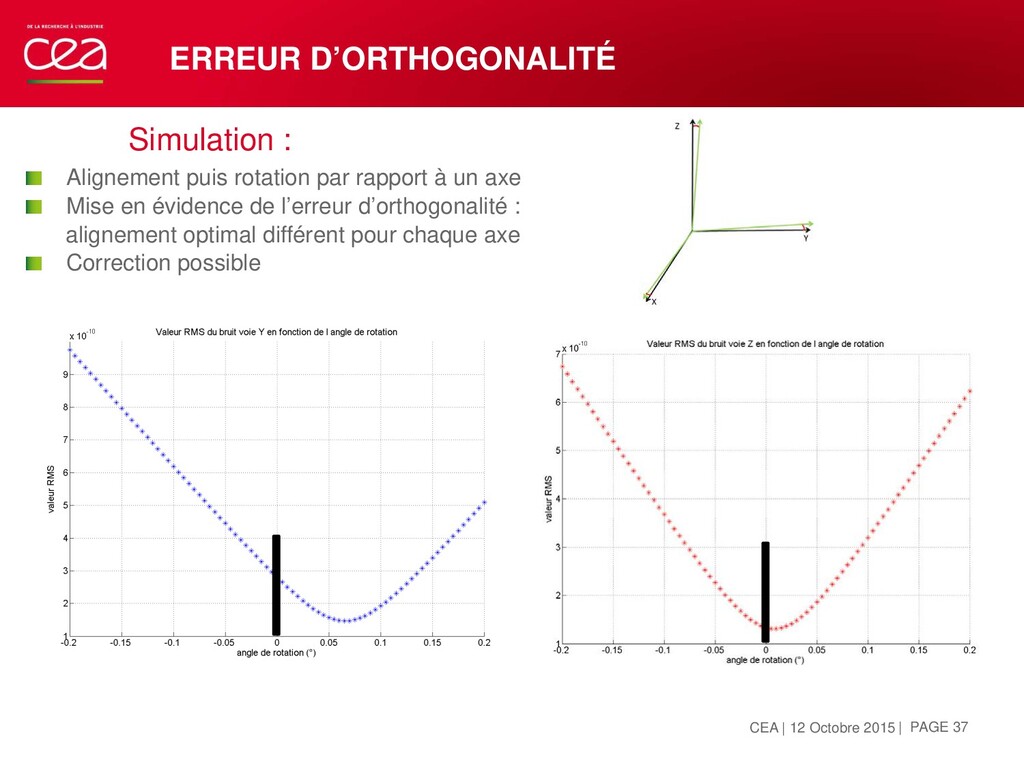
axe Mise en évidence de l’erreur d’orthogonalité : alignement optimal différent pour chaque axe Correction possible ERREUR D’ORTHOGONALITÉ OCTOBRE 12, 2015 | PAGE 37 CEA | 12 Octobre 2015
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}