Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
都市交通における理論に基づく渋滞長予測
Search
白上 龍 (Ryu Shirakami)
November 13, 2023
600
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
都市交通における理論に基づく渋滞長予測
理研AIPミニワークショップ「機械学習による人間の選択行動とシミュレーションの新展開」における発表資料です。
白上 龍 (Ryu Shirakami)
November 13, 2023
More Decks by 白上 龍 (Ryu Shirakami)
See All by 白上 龍 (Ryu Shirakami)
QTNet: Theory-based Queue Length Prediction for Urban Traffic @KDD2023
rshirakami
0
190
Featured
See All Featured
Ten Tips & Tricks for a 🌱 transition
stuffmc
0
160
Visual Storytelling: How to be a Superhuman Communicator
reverentgeek
2
600
Making Projects Easy
brettharned
120
6.7k
Performance Is Good for Brains [We Love Speed 2024]
tammyeverts
12
1.8k
What’s in a name? Adding method to the madness
productmarketing
PRO
24
4.1k
The Web Performance Landscape in 2024 [PerfNow 2024]
tammyeverts
12
1.2k
エンジニアに許された特別な時間の終わり
watany
108
250k
The SEO identity crisis: Don't let AI make you average
varn
0
520
Navigating the moral maze — ethical principles for Al-driven product design
skipperchong
2
430
XXLCSS - How to scale CSS and keep your sanity
sugarenia
249
1.3M
4 Signs Your Business is Dying
shpigford
187
22k
SEOcharity - Dark patterns in SEO and UX: How to avoid them and build a more ethical web
sarafernandez
0
230
Transcript
都市交通における理論に基づく 渋滞長予測 住友電工システムソリューション株式会社 白上 龍 2023/11/15 理研-AIP ミニワークショップ 機械学習による人間の選択行動とシミュレーションの新展開
2 自己紹介 名前:白上 龍(Ryu Shirakami) 所属:住友電工システムソリューション株式会社 経歴:
2017-2019年 京都大学大学院理学研究科化学専攻 • 磁性体を合成し、その物性を測定するという研究 2019年- 住友電気工業住友電工システムソリューション • 交通管制システムで利用されるAIの研究開発
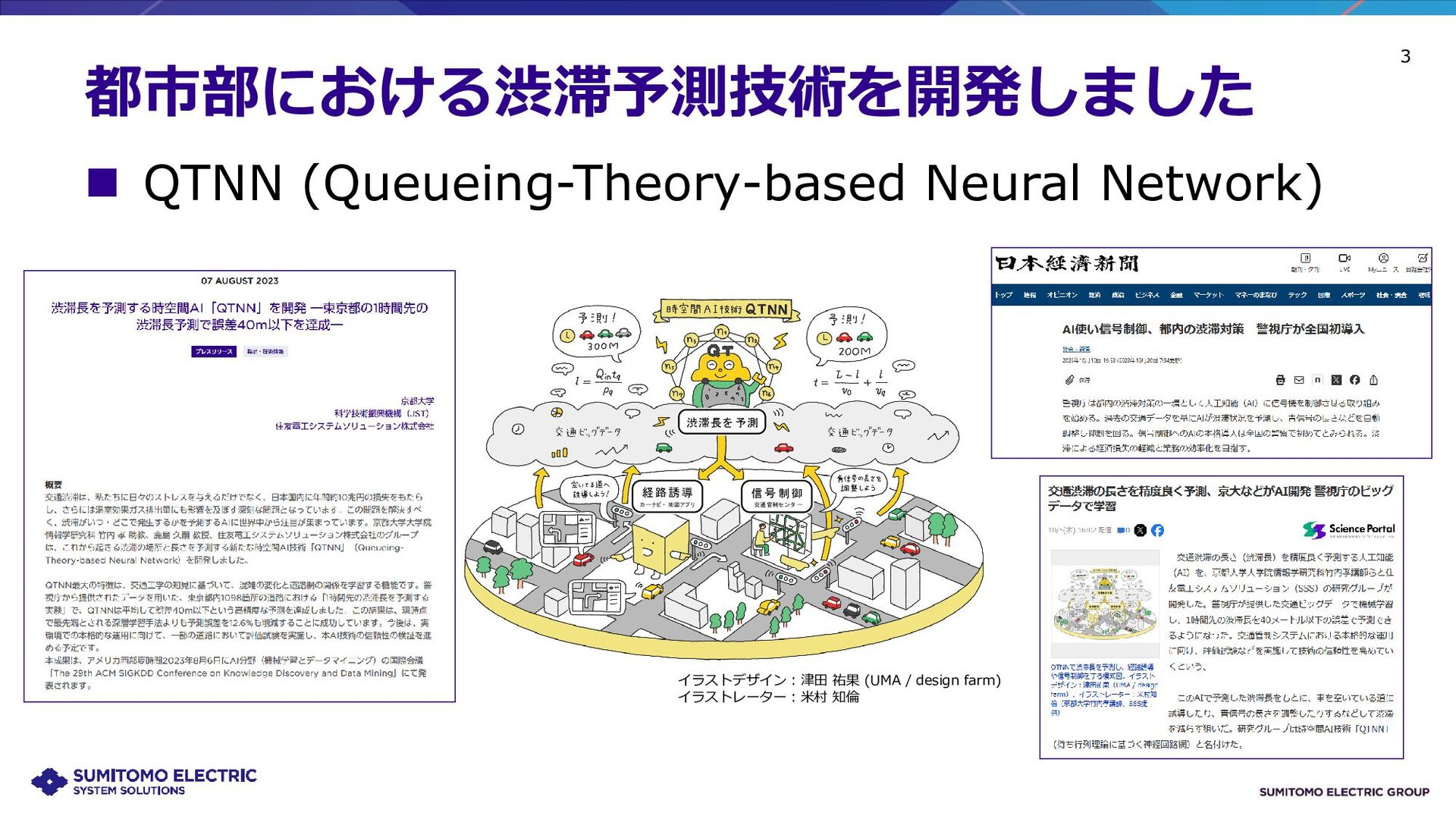
3 都市部における渋滞予測技術を開発しました QTNN (Queueing-Theory-based Neural Network) 渋滞長を 予測 信号
制 御 交通管制セン タ ー カ ーナビ ・ 地図アプリ 経 路 誘導 イラストデザイン:津田 祐果 (UMA / design farm) イラストレーター:米村 知倫
4 目次 1. 交通管制とは? -5min 2. 交通予測 -10min 3. 渋滞手法QTNN
-15min 4. 交通管制システムに求められるAI -5min
1. 交通管制とは? • 交通管制の意義と目的
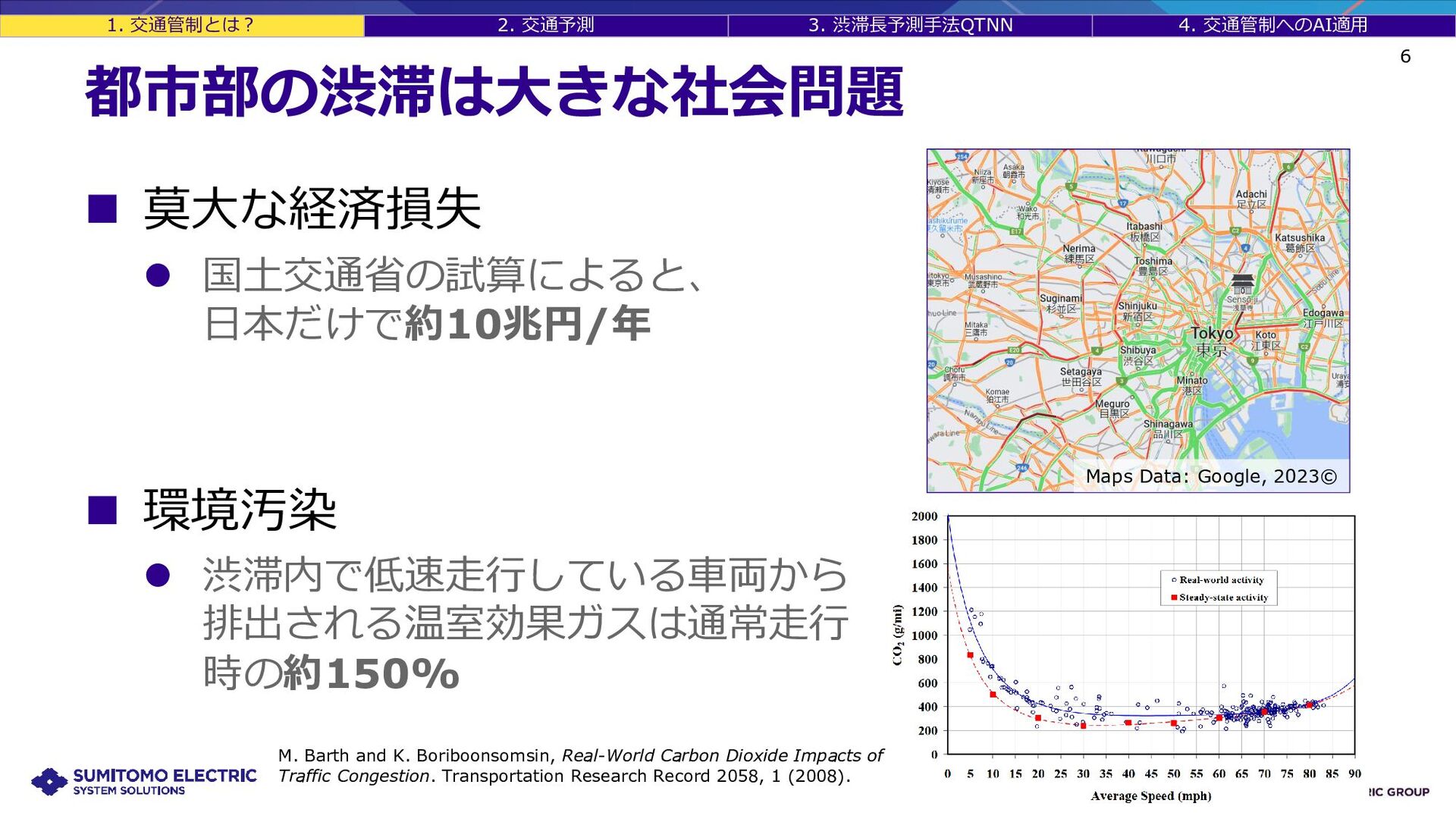
6 1. 交通管制とは? 2. 交通予測 4. 交通管制へのAI適用 3. 渋滞長予測手法QTNN 都市部の渋滞は大きな社会問題
莫大な経済損失 国土交通省の試算によると、 日本だけで約10兆円/年 環境汚染 渋滞内で低速走行している車両から 排出される温室効果ガスは通常走行 時の約150% Maps Data: Google, 2023© M. Barth and K. Boriboonsomsin, Real-World Carbon Dioxide Impacts of Traffic Congestion. Transportation Research Record 2058, 1 (2008).
7 1. 交通管制とは? 2. 交通予測 4. 交通管制へのAI適用 3. 渋滞長予測手法QTNN ITSと交通管制:安全で快適な交通のために
高度交通システム (ITS: Intelligent Transport Systems) 安全運転支援 ナビゲーション の高度化 公共交通支援 道路管理の効率化 交通管理の効率化 交通管制システム (ITCS: Integrated Traffic Control Systems) 情報収集 信号制御 情報提供 光ビーコン 感知器 交通管制センター etc… 写真:警視庁HPより 感知器等で収集した情報を分析し信号制御や情報提供を行うこと で、安全で快適な交通を実現する
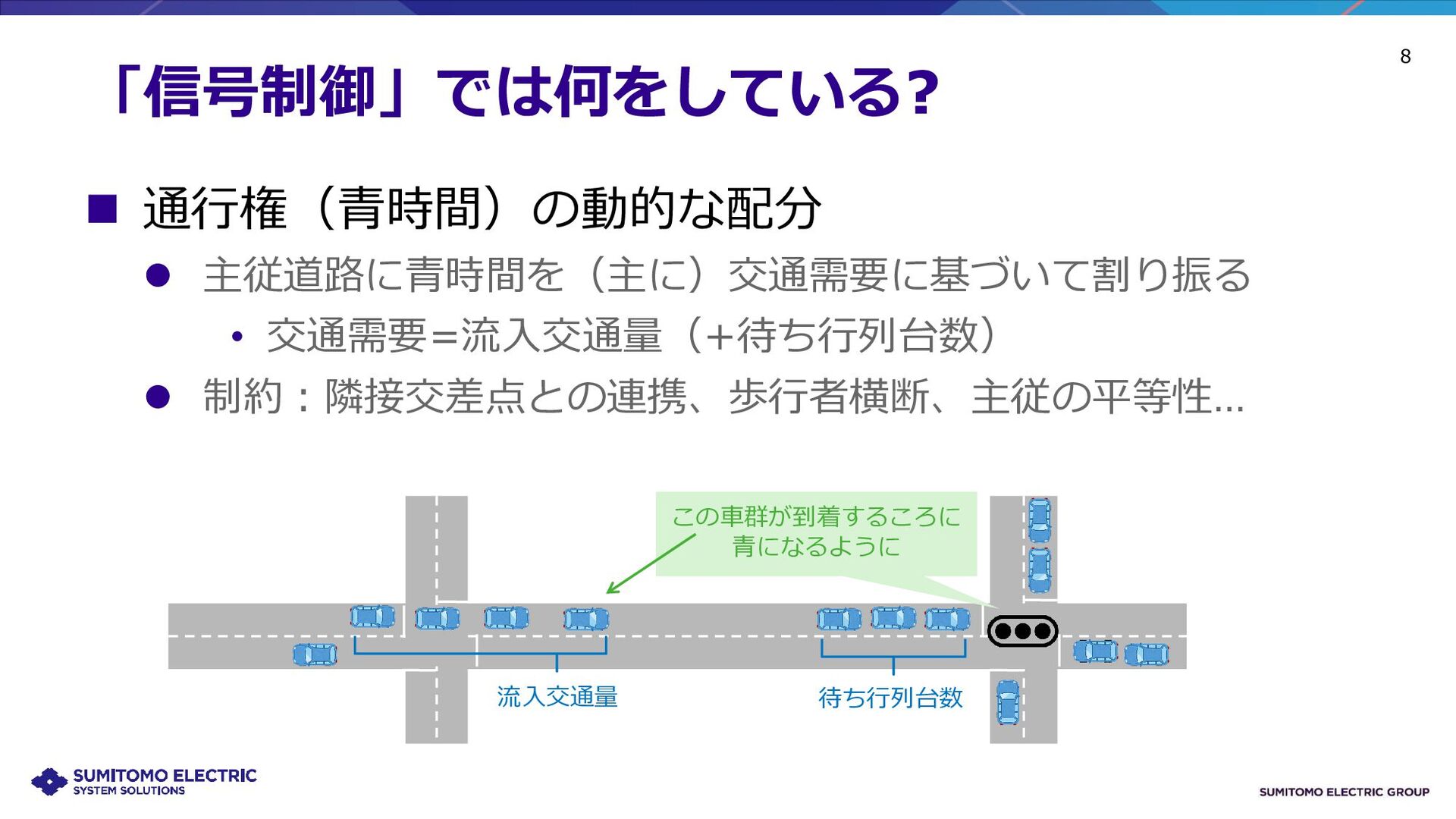
8 「信号制御」では何をしている? 通行権(青時間)の動的な配分 主従道路に青時間を(主に)交通需要に基づいて割り振る • 交通需要=流入交通量(+待ち行列台数) 制約:隣接交差点との連携、歩行者横断、主従の平等性…
この車群が到着するころに 青になるように 待ち行列台数 流入交通量
2. 交通予測 • 予測のターゲットとなっている指標 • 既存の予測手法 • 信号制御アルゴリズムが必要とする指標
11 1. 交通管制とは? 2. 交通予測 4. 交通管制へのAI適用 3. 渋滞長予測手法QTNN 交通予測への関心
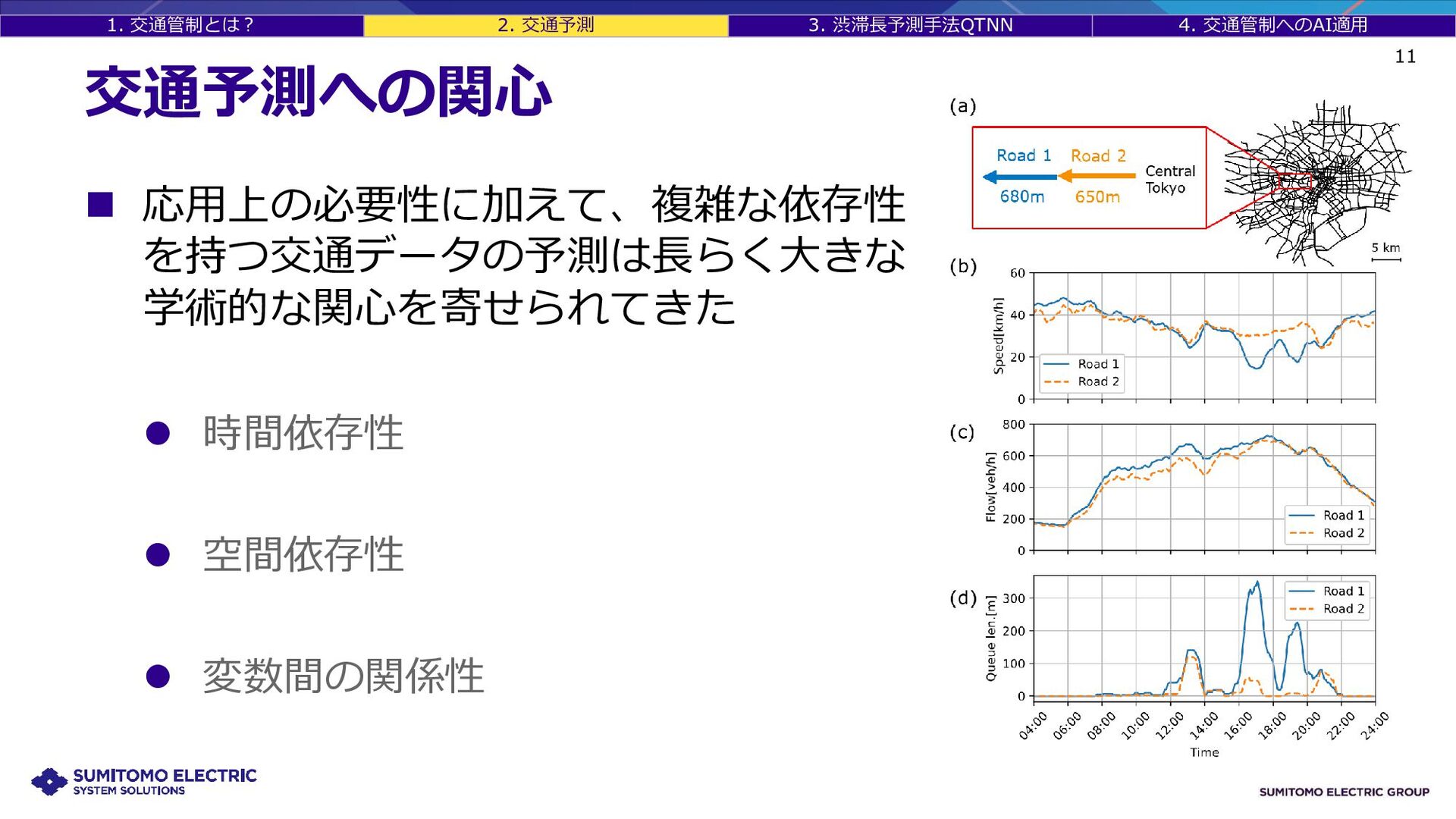
応用上の必要性に加えて、複雑な依存性 を持つ交通データの予測は長らく大きな 学術的な関心を寄せられてきた 時間依存性 空間依存性 変数間の関係性
12 1. 交通管制とは? 2. 交通予測 4. 交通管制へのAI適用 3. 渋滞長予測手法QTNN 様々な交通予測手法
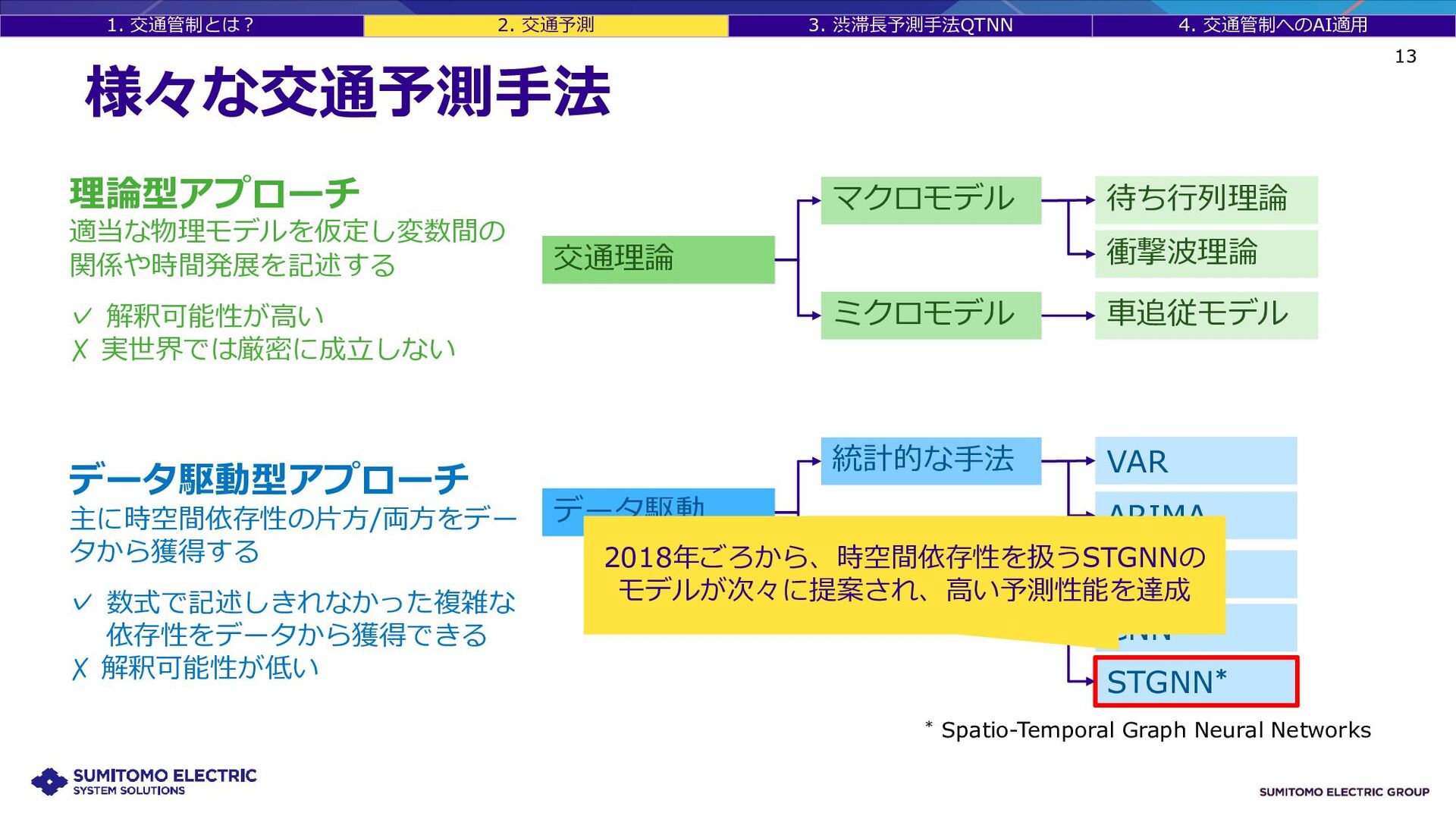
交通理論 データ駆動 マクロモデル ミクロモデル 車追従モデル 待ち行列理論 衝撃波理論 統計的な手法 深層学習 RNN VAR STGNN* ARIMA CNN * Spatio-Temporal Graph Neural Networks 理論型アプローチ 適当な物理モデルを仮定し変数間の 関係や時間発展を記述する ✓ 解釈可能性が高い ✗ 実世界では厳密に成立しない データ駆動型アプローチ 主に時空間依存性の片方/両方をデー タから獲得する ✓ 数式で記述しきれなかった複雑な 依存性をデータから獲得できる ✗ 解釈可能性が低い
13 1. 交通管制とは? 2. 交通予測 4. 交通管制へのAI適用 3. 渋滞長予測手法QTNN 様々な交通予測手法
交通理論 データ駆動 マクロモデル ミクロモデル 車追従モデル 待ち行列理論 衝撃波理論 統計的な手法 深層学習 RNN VAR STGNN* ARIMA CNN 理論型アプローチ 適当な物理モデルを仮定し変数間の 関係や時間発展を記述する ✓ 解釈可能性が高い ✗ 実世界では厳密に成立しない データ駆動型アプローチ 主に時空間依存性の片方/両方をデー タから獲得する ✓ 数式で記述しきれなかった複雑な 依存性をデータから獲得できる ✗ 解釈可能性が低い 2018年ごろから、時空間依存性を扱うSTGNNの モデルが次々に提案され、高い予測性能を達成 * Spatio-Temporal Graph Neural Networks
14 1. 交通管制とは? 2. 交通予測 4. 交通管制へのAI適用 3. 渋滞長予測手法QTNN 交通予測のための深層学習モデルは色々ある
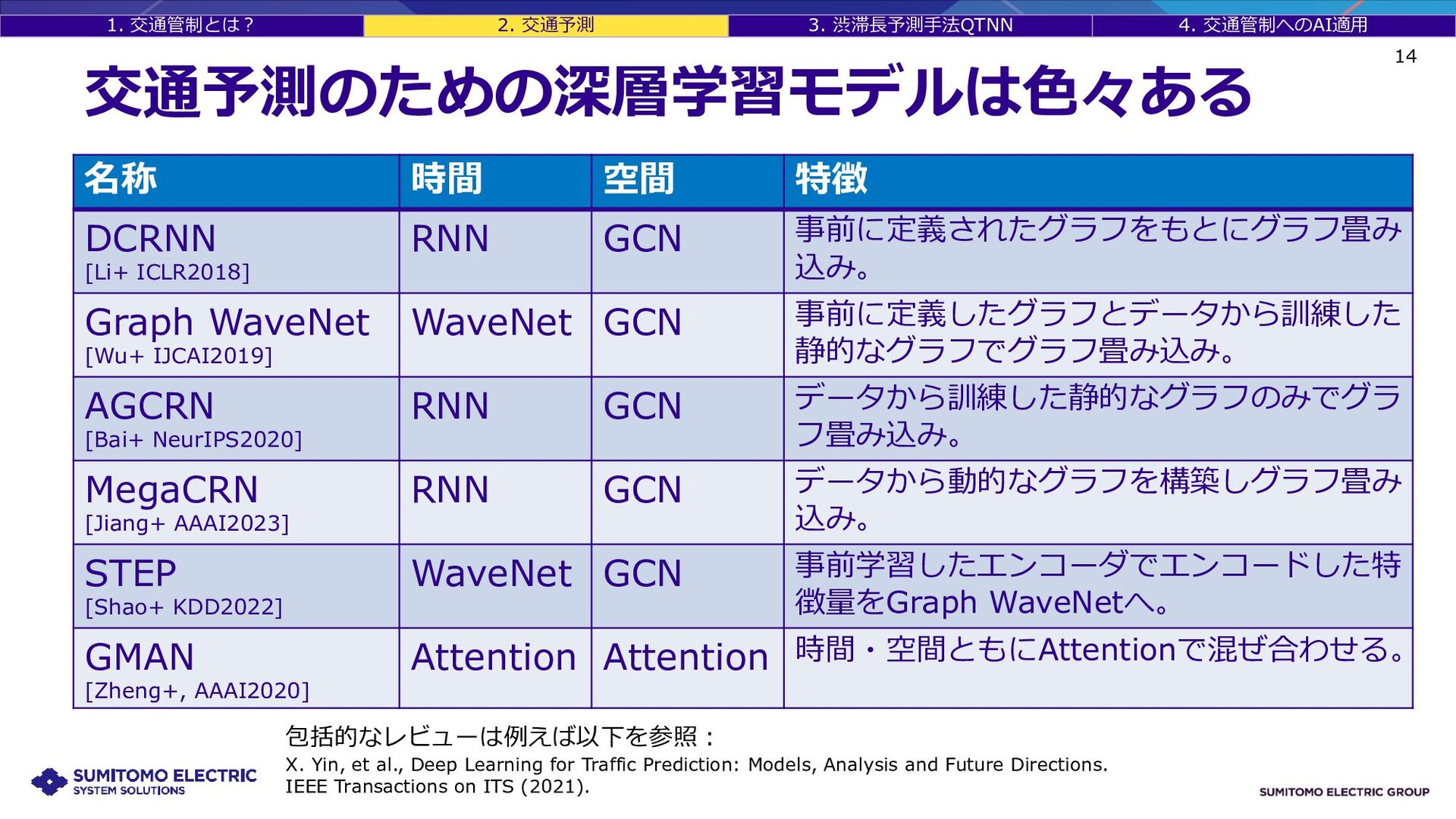
名称 時間 空間 特徴 DCRNN [Li+ ICLR2018] RNN GCN 事前に定義されたグラフをもとにグラフ畳み 込み。 Graph WaveNet [Wu+ IJCAI2019] WaveNet GCN 事前に定義したグラフとデータから訓練した 静的なグラフでグラフ畳み込み。 AGCRN [Bai+ NeurIPS2020] RNN GCN データから訓練した静的なグラフのみでグラ フ畳み込み。 MegaCRN [Jiang+ AAAI2023] RNN GCN データから動的なグラフを構築しグラフ畳み 込み。 STEP [Shao+ KDD2022] WaveNet GCN 事前学習したエンコーダでエンコードした特 徴量をGraph WaveNetへ。 GMAN [Zheng+, AAAI2020] Attention Attention 時間・空間ともにAttentionで混ぜ合わせる。 包括的なレビューは例えば以下を参照: X. Yin, et al., Deep Learning for Traffic Prediction: Models, Analysis and Future Directions. IEEE Transactions on ITS (2021).
15 1. 交通管制とは? 2. 交通予測 4. 交通管制へのAI適用 3. 渋滞長予測手法QTNN データセット
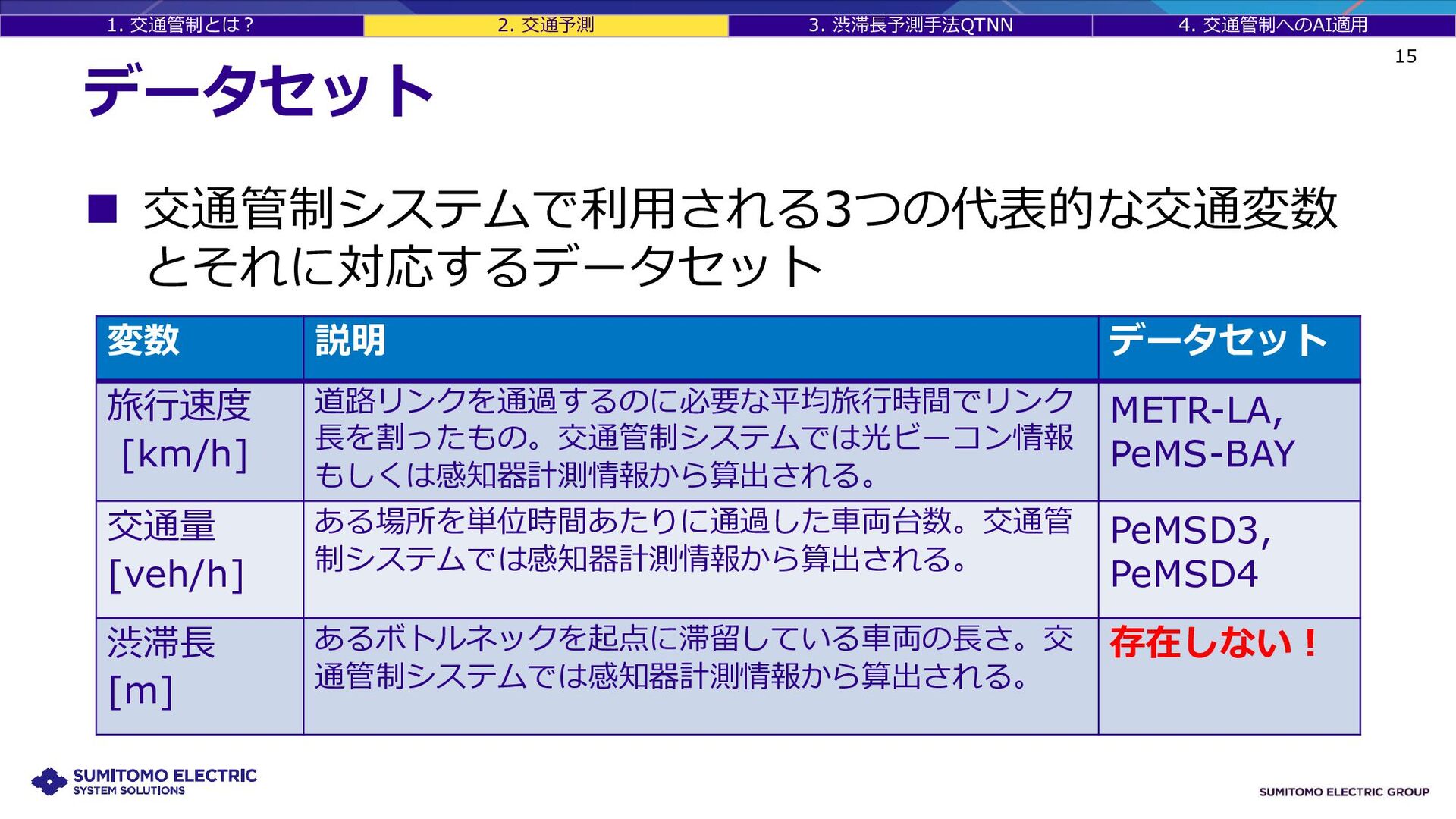
交通管制システムで利用される3つの代表的な交通変数 とそれに対応するデータセット 変数 説明 データセット 旅行速度 [km/h] 道路リンクを通過するのに必要な平均旅行時間でリンク 長を割ったもの。交通管制システムでは光ビーコン情報 もしくは感知器計測情報から算出される。 METR-LA, PeMS-BAY 交通量 [veh/h] ある場所を単位時間あたりに通過した車両台数。交通管 制システムでは感知器計測情報から算出される。 PeMSD3, PeMSD4 渋滞長 [m] あるボトルネックを起点に滞留している車両の長さ。交 通管制システムでは感知器計測情報から算出される。 存在しない!
16 1. 交通管制とは? 2. 交通予測 4. 交通管制へのAI適用 3. 渋滞長予測手法QTNN データセット
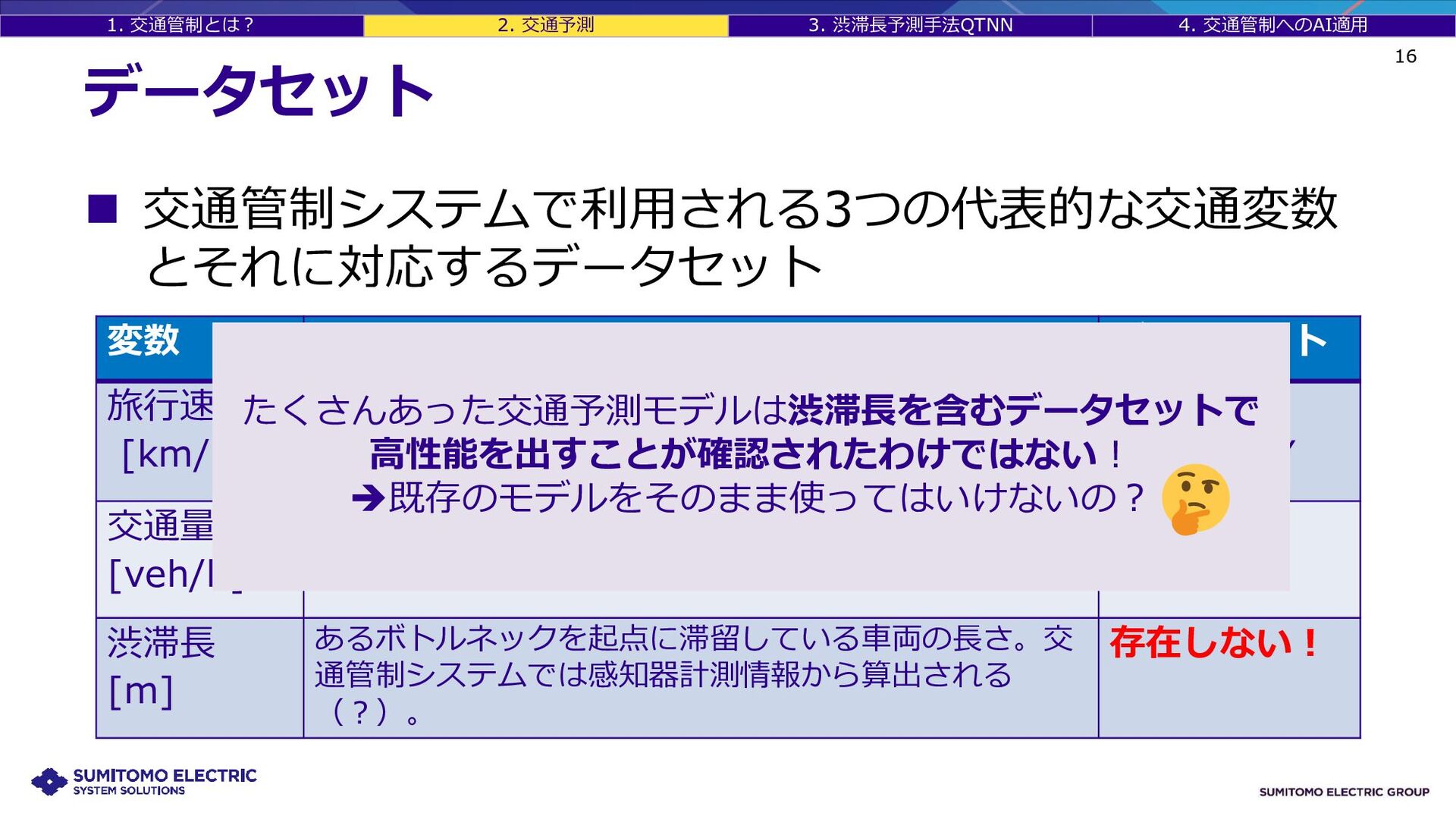
交通管制システムで利用される3つの代表的な交通変数 とそれに対応するデータセット 変数 説明 データセット 旅行速度 [km/h] 道路リンクを通過するのに必要な平均旅行時間でリンク 長を割ったもの。交通管制システムでは光ビーコン情報 もしくは感知器計測情報から算出される。 METR-LA, PeMS-BAY 交通量 [veh/h] ある場所を単位時間あたりに通過した車両台数。交通管 制システムでは感知器計測情報から算出される。 PeMSD3, PeMSD4 渋滞長 [m] あるボトルネックを起点に滞留している車両の長さ。交 通管制システムでは感知器計測情報から算出される (?)。 存在しない! たくさんあった交通予測モデルは渋滞長を含むデータセットで 高性能を出すことが確認されたわけではない! 既存のモデルをそのまま使ってはいけないの?
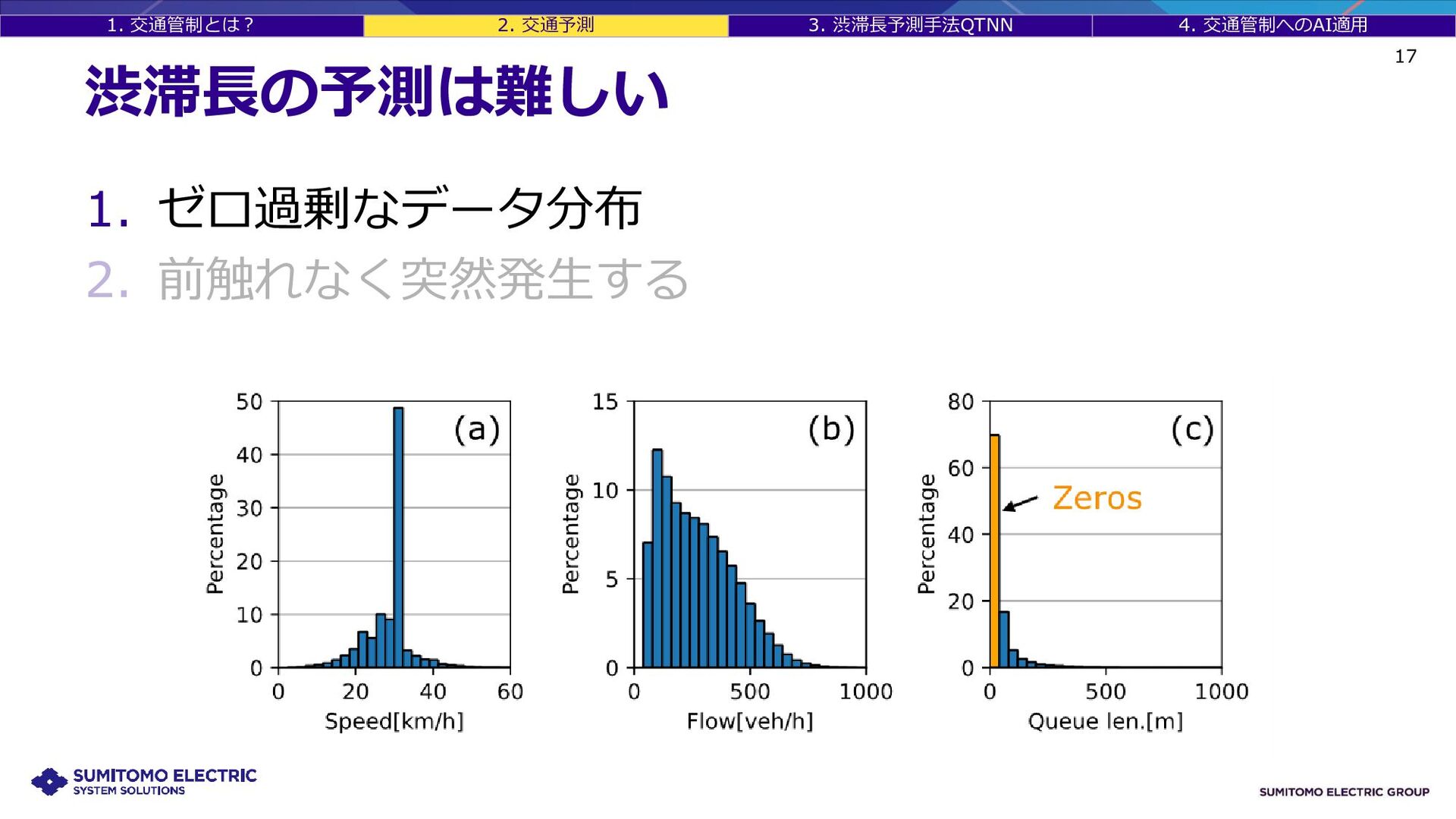
17 1. 交通管制とは? 2. 交通予測 4. 交通管制へのAI適用 3. 渋滞長予測手法QTNN 渋滞長の予測は難しい
1. ゼロ過剰なデータ分布 2. 前触れなく突然発生する
18 1. 交通管制とは? 2. 交通予測 4. 交通管制へのAI適用 3. 渋滞長予測手法QTNN 渋滞長の予測は難しい
1. ゼロ過剰なデータ分布 2. 前触れなく突然発生する 交通需要(処理すべき交通量)が道路のキャパシティ(飽和交 通流率)を上回ったときに突然発生する 𝐶𝑎𝑝𝑎𝑐𝑖𝑡𝑦 𝐷𝑒𝑚𝑎𝑛𝑑 直近の状態から渋滞の発生 を予測するのは難しい
19 1. 交通管制とは? 2. 交通予測 4. 交通管制へのAI適用 3. 渋滞長予測手法QTNN 渋滞長の予測は難しい
1. ゼロ過剰なデータ分布 2. 前触れなく突然発生する 渋滞長を予測するのは速度や交通量を予測することより難しい 既存の手法では十分な性能が得られない可能性がある
3. 渋滞長予測手法QTNN • モデルの概要 • 都内一般道のデータを用いた実験結果
QTNet: Theory-based Queue Length Prediction for Urban Traffic Ryu Shirakami1,
Toshiya Kitahara1, Koh Takeuchi2, Hisashi Kashima2 1Sumitomo Electric System Solutions Co., Ltd. 2Kyoto University ↑論文はコチラ 渋滞長を 予測
22 1. 交通管制とは? 2. 交通予測 4. 交通管制へのAI適用 3. 渋滞長予測手法QTNN QTNNで解決したい問題
1.渋滞長予測のためのSTGNNモデル ゼロ過剰で突然発生する渋滞長を予測するためのモデル 2.説明可能性 予測結果を説明できるモデル
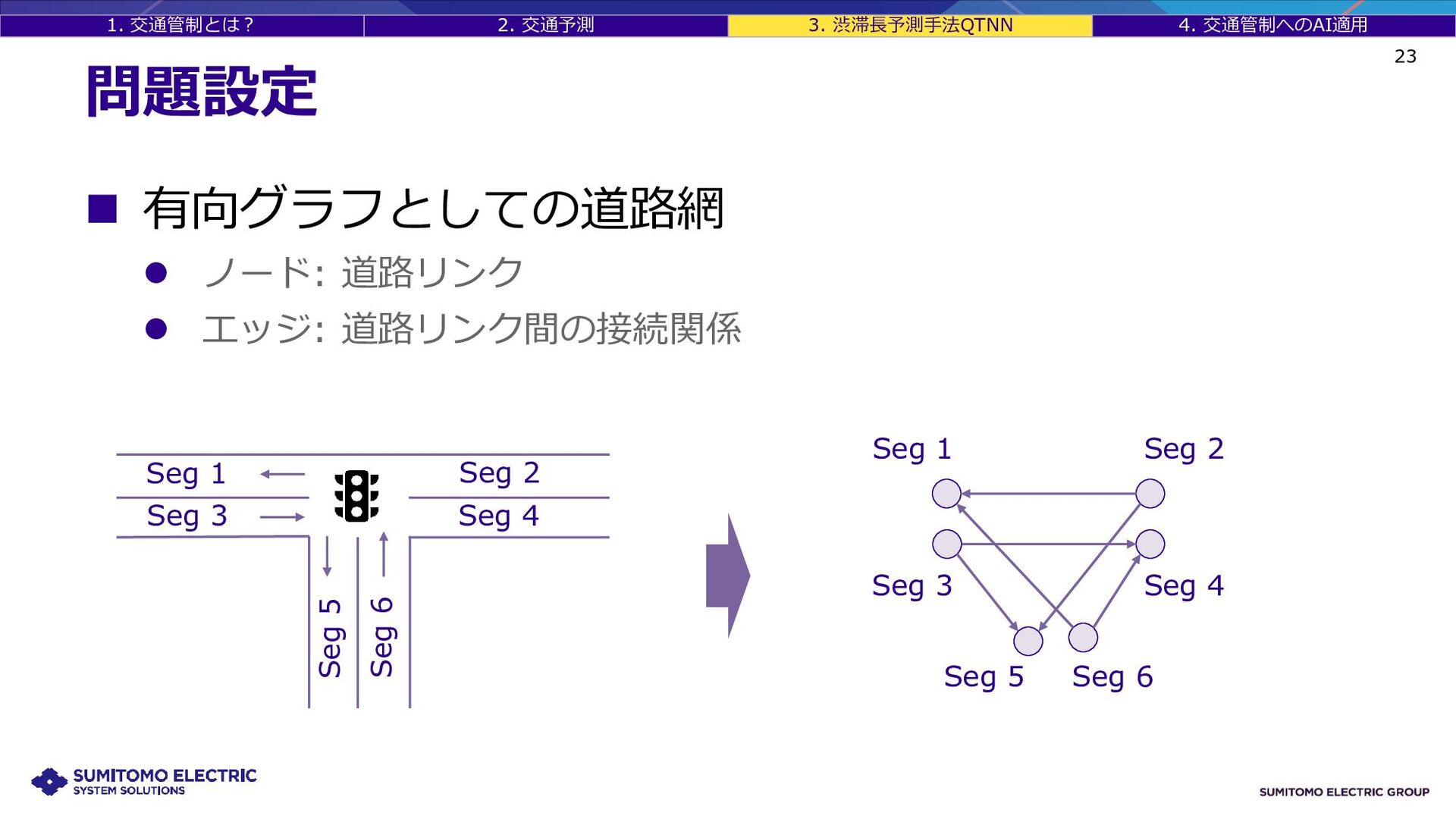
23 1. 交通管制とは? 2. 交通予測 4. 交通管制へのAI適用 3. 渋滞長予測手法QTNN 問題設定
有向グラフとしての道路網 ノード: 道路リンク エッジ: 道路リンク間の接続関係 Seg 3 Seg 4 Seg 1 Seg 2 Seg 5 Seg 6 Seg 1 Seg 2 Seg 3 Seg 4 Seg 5 Seg 6
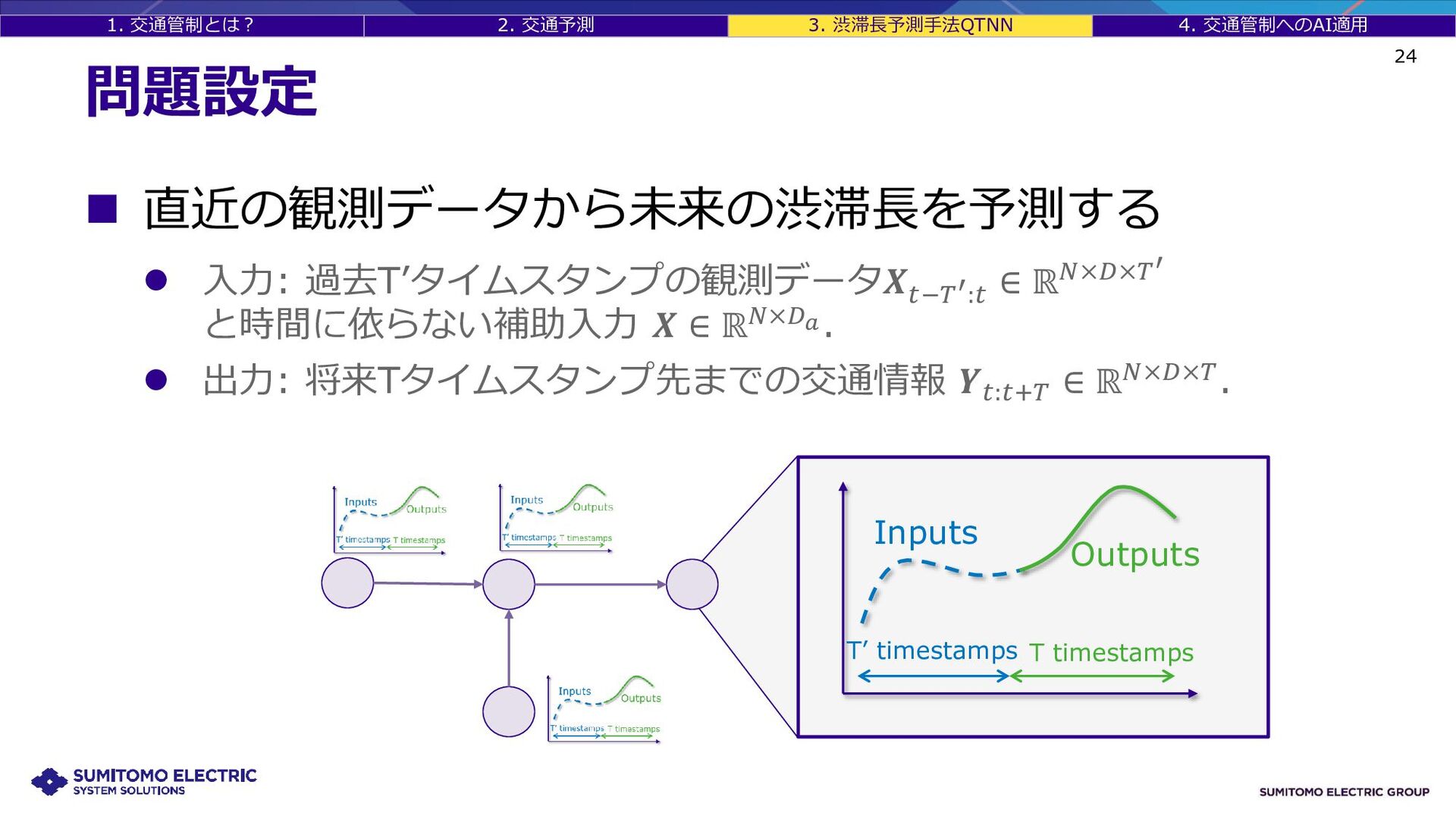
24 1. 交通管制とは? 2. 交通予測 4. 交通管制へのAI適用 3. 渋滞長予測手法QTNN 問題設定
直近の観測データから未来の渋滞長を予測する 入力: 過去T’タイムスタンプの観測データ𝑿𝑡−𝑇′:𝑡 ∈ ℝ𝑁×𝐷×𝑇′ と時間に依らない補助入力 𝑿 ∈ ℝ𝑁×𝐷𝑎. 出力: 将来Tタイムスタンプ先までの交通情報 𝒀𝑡:𝑡+𝑇 ∈ ℝ𝑁×𝐷×𝑇. Inputs Outputs T timestamps T’ timestamps
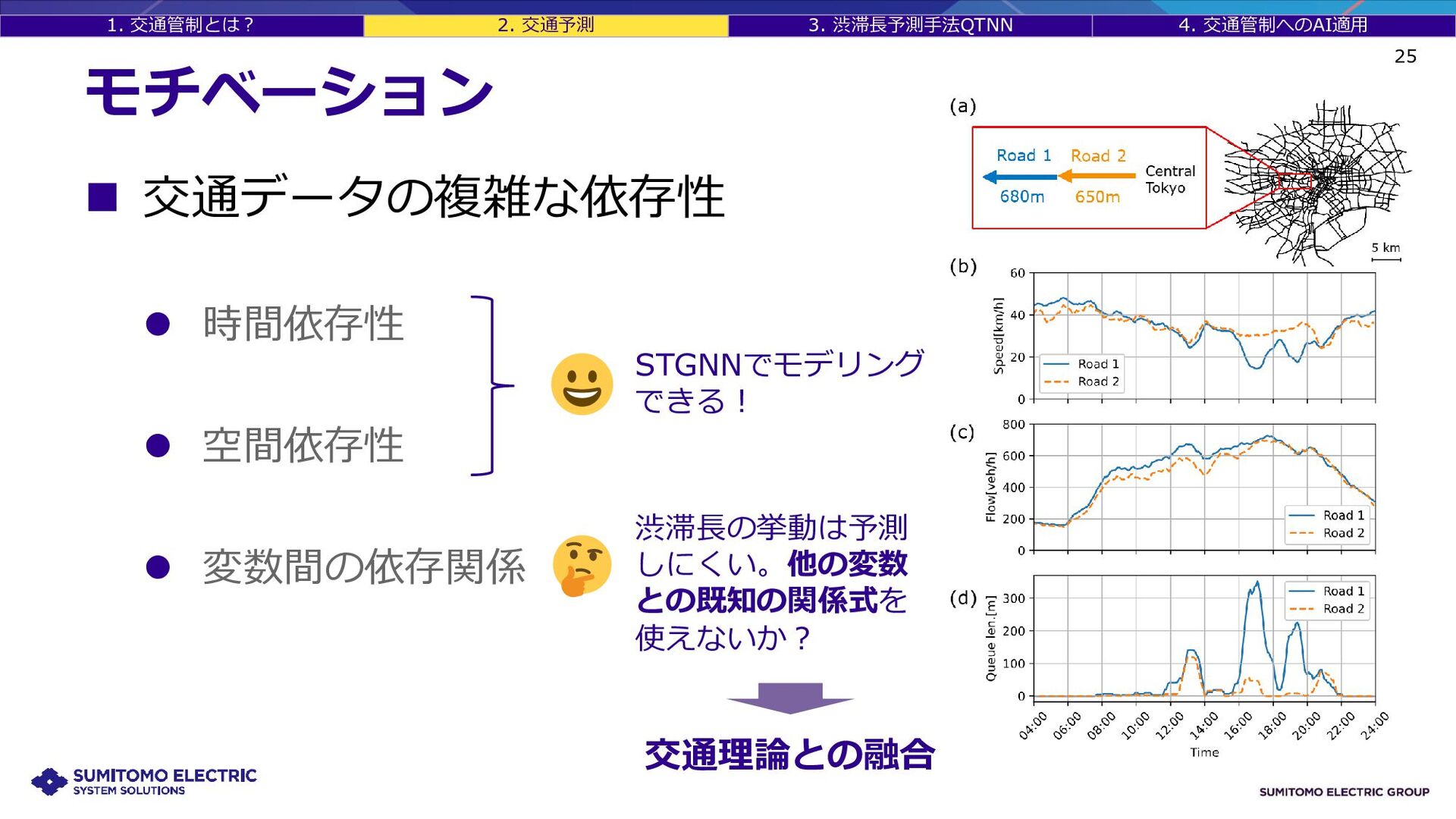
25 1. 交通管制とは? 2. 交通予測 4. 交通管制へのAI適用 3. 渋滞長予測手法QTNN モチベーション
交通データの複雑な依存性 時間依存性 空間依存性 変数間の依存関係 STGNNでモデリング できる! 渋滞長の挙動は予測 しにくい。他の変数 との既知の関係式を 使えないか? 交通理論との融合
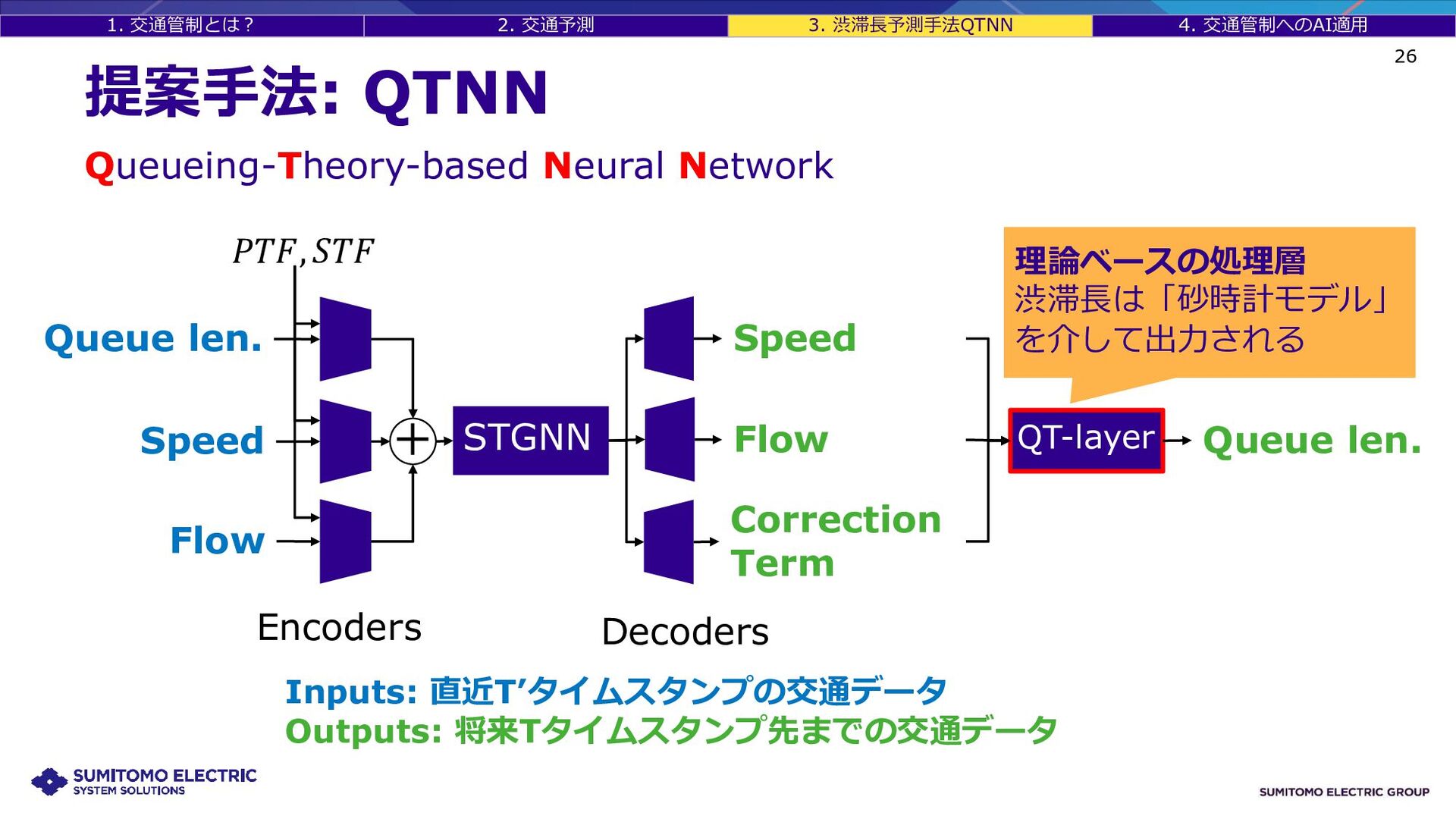
26 1. 交通管制とは? 2. 交通予測 4. 交通管制へのAI適用 3. 渋滞長予測手法QTNN 提案手法:
QTNN 𝑃𝑇𝐹, 𝑆𝑇𝐹 STGNN QT-layer Encoders Decoders Queue len. Speed Flow Correction Term Speed Flow Inputs: 直近T’タイムスタンプの交通データ Outputs: 将来Tタイムスタンプ先までの交通データ Queue len. 理論ベースの処理層 渋滞長は「砂時計モデル」 を介して出力される Queueing-Theory-based Neural Network
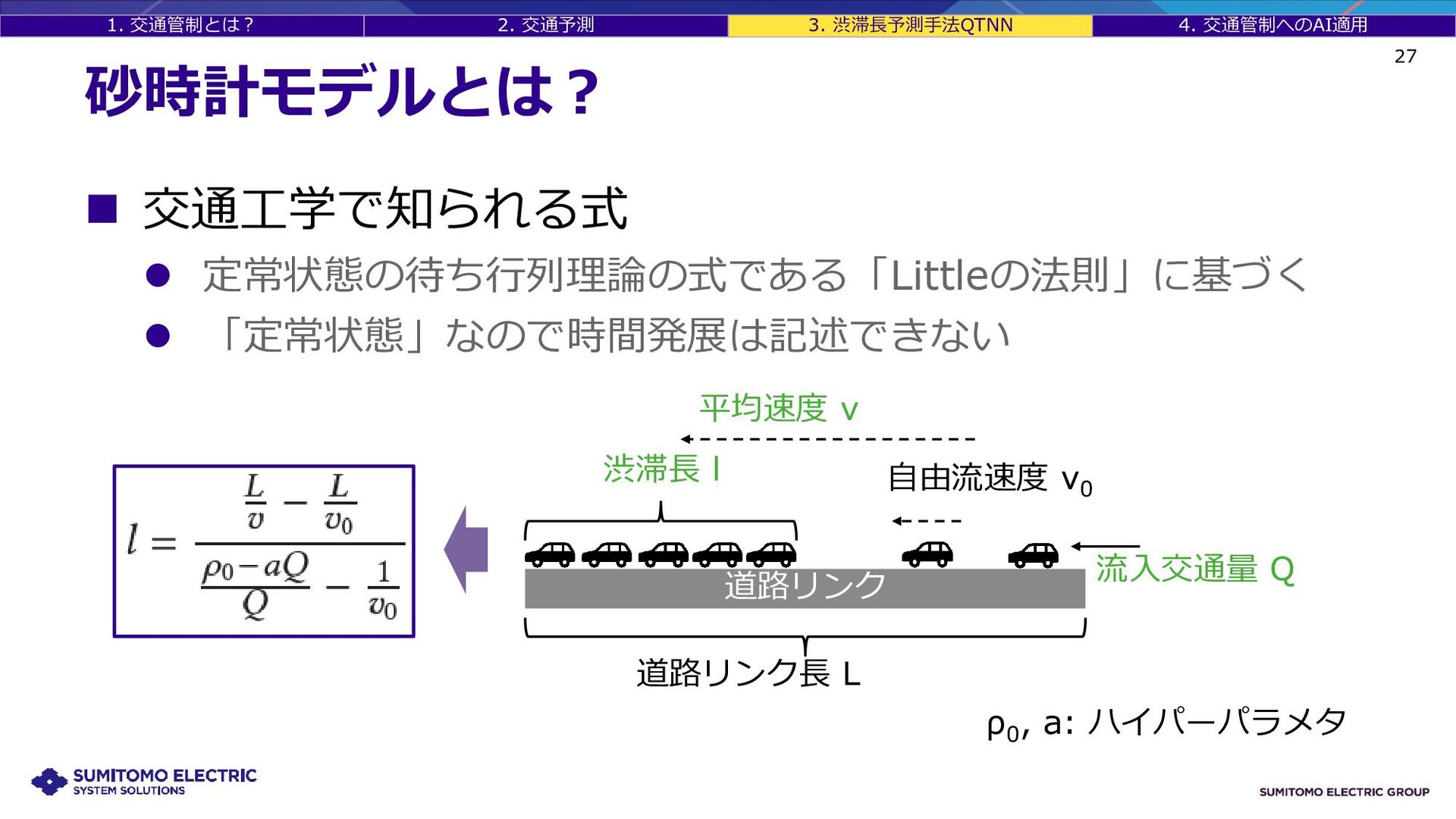
27 1. 交通管制とは? 2. 交通予測 4. 交通管制へのAI適用 3. 渋滞長予測手法QTNN 砂時計モデルとは?
交通工学で知られる式 定常状態の待ち行列理論の式である「Littleの法則」に基づく 「定常状態」なので時間発展は記述できない 道路リンク 道路リンク長 L 渋滞長 l 流入交通量 Q 自由流速度 v0 平均速度 v ρ 0 , a: ハイパーパラメタ
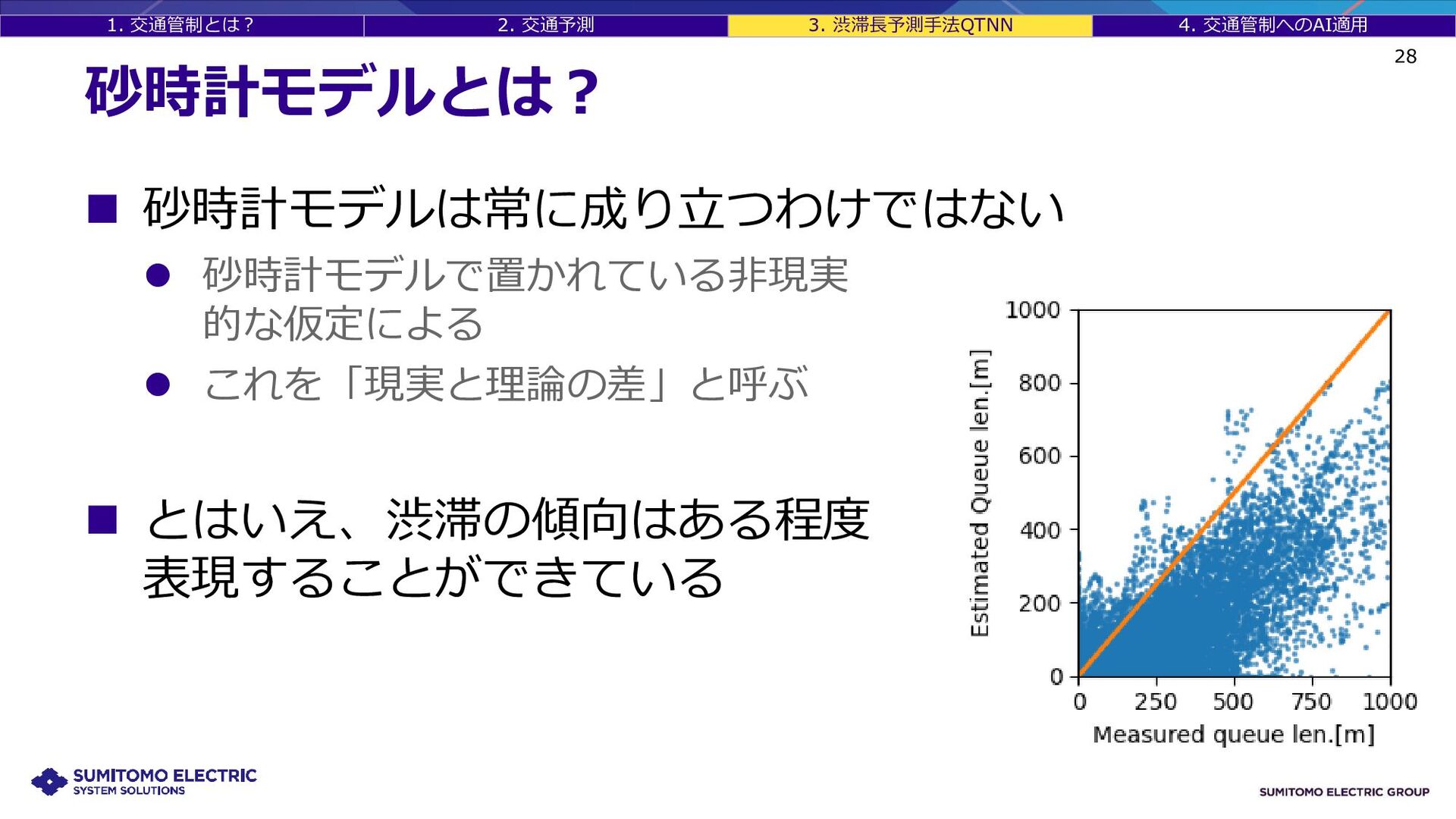
28 1. 交通管制とは? 2. 交通予測 4. 交通管制へのAI適用 3. 渋滞長予測手法QTNN 砂時計モデルとは?
砂時計モデルは常に成り立つわけではない 砂時計モデルで置かれている非現実 的な仮定による これを「現実と理論の差」と呼ぶ とはいえ、渋滞の傾向はある程度 表現することができている
29 1. 交通管制とは? 2. 交通予測 4. 交通管制へのAI適用 3. 渋滞長予測手法QTNN 交通理論と深層学習の融合
PINN: Physics-Informed Deep Learning 物理制約を深層学習モデルの中に取り込んだもの 主に2通りのやり方がある • ソフトな制約:損失関数に満たすべき物理方程式を加算 • ハードな制約:ネットワークの中に方程式を埋め込む
30 1. 交通管制とは? 2. 交通予測 4. 交通管制へのAI適用 3. 渋滞長予測手法QTNN 交通理論と深層学習の融合
PINN: Physics-Informed Deep Learning 物理制約を深層学習モデルの中に取り込んだもの 主に2通りのやり方がある • ソフトな制約:損失関数に満たすべき物理方程式を加算 • ハードな制約:ネットワークの中に方程式を埋め込む こちらの方針に基づいて砂時計モデルをネットワークの中に組み込む
31 1. 交通管制とは? 2. 交通予測 4. 交通管制へのAI適用 3. 渋滞長予測手法QTNN QT-layer
砂時計モデルに基づいて渋滞長を出力するQT-layerを 提案する交通理論と深層学習の融合 where . 砂時計モデル 補正項
32 1. 交通管制とは? 2. 交通予測 4. 交通管制へのAI適用 3. 渋滞長予測手法QTNN 補正項Cの訓練
カリキュラム学習/スケジュールドサンプリング 訓練初期は予測値ො 𝑣, 𝑄が不正確なので砂時計モデルの推定も不正確 መ 𝐶を効率的に訓練するために、訓練初期は砂時計モデルの計算に真 の𝑣, 𝑄を用い、徐々に予測したො 𝑣, 𝑄を使用するようにする where . 砂時計モデル 補正項
33 1. 交通管制とは? 2. 交通予測 4. 交通管制へのAI適用 3. 渋滞長予測手法QTNN 補助特徴量:
PTF and STF 周期的交通特徴量 (PTF: Periodic Traffic Features) 交通データの周期性(曜日、時間)に関する情報 静的交通特徴量 (STF: Static Traffic Features) 交通データの空間的な不均質性(リンク長、流入/流出リンク数 など)に関する情報
34 1. 交通管制とは? 2. 交通予測 4. 交通管制へのAI適用 3. 渋滞長予測手法QTNN [再掲]
提案手法: QTNN 𝑃𝑇𝐹, 𝑆𝑇𝐹 STGNN QT-layer Encoders Decoders Queue len. Speed Flow Correction Term Speed Flow Inputs: 直近T’タイムスタンプの交通データ Outputs: 将来Tタイムスタンプ先までの交通データ Queue len. 理論ベースの処理層 渋滞長は「砂時計モデル」 を介して出力される Queueing-Theory-based Neural Network
35 1. 交通管制とは? 2. 交通予測 4. 交通管制へのAI適用 3. 渋滞長予測手法QTNN 損失関数
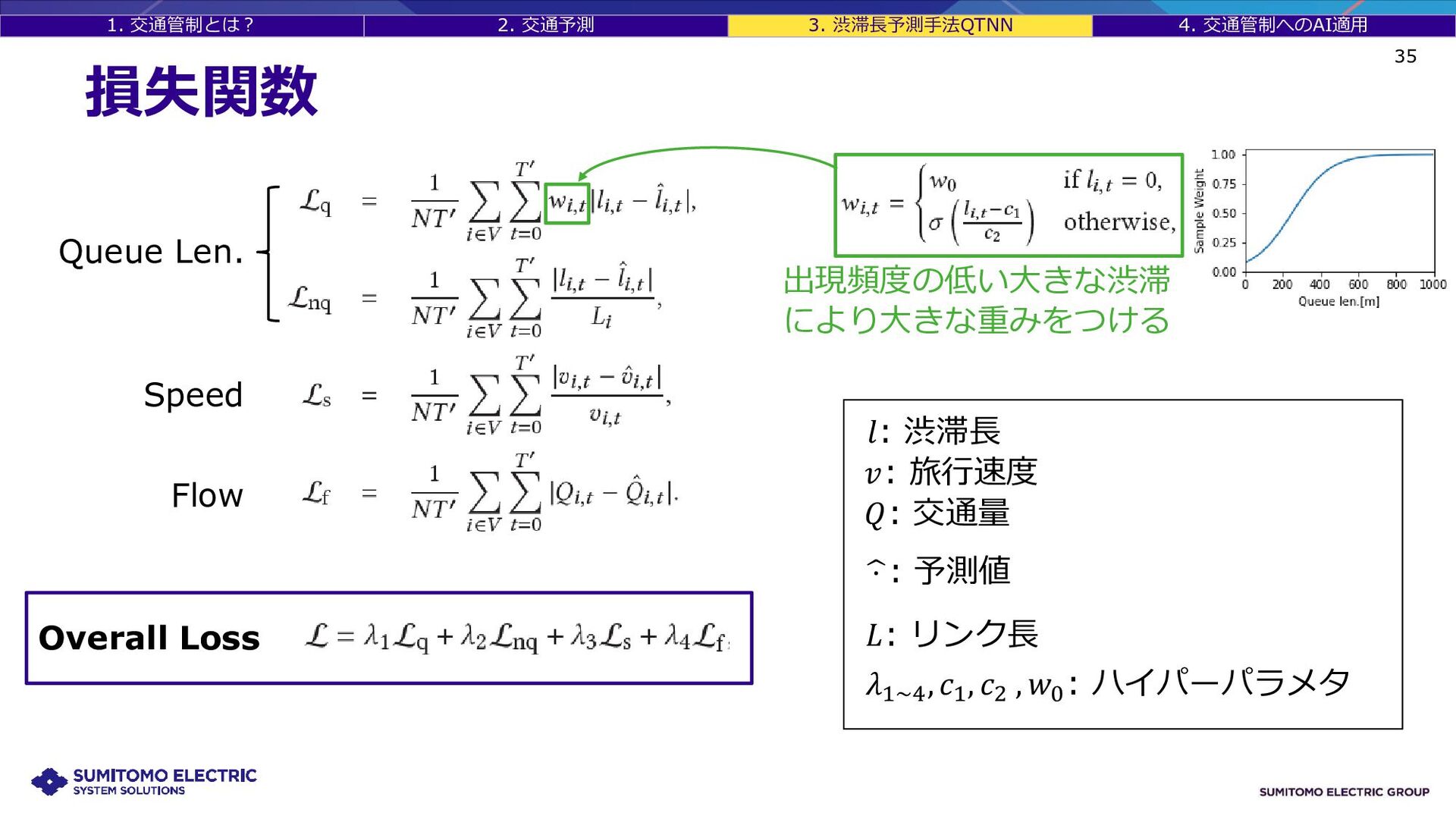
Queue Len. Speed Flow Overall Loss 出現頻度の低い大きな渋滞 により大きな重みをつける 𝑙: 渋滞長 𝑣: 旅行速度 𝑄: 交通量 ෝ ⋅ : 予測値 𝐿: リンク長 𝜆1~4 , 𝑐1 , 𝑐2 , 𝑤0 : ハイパーパラメタ
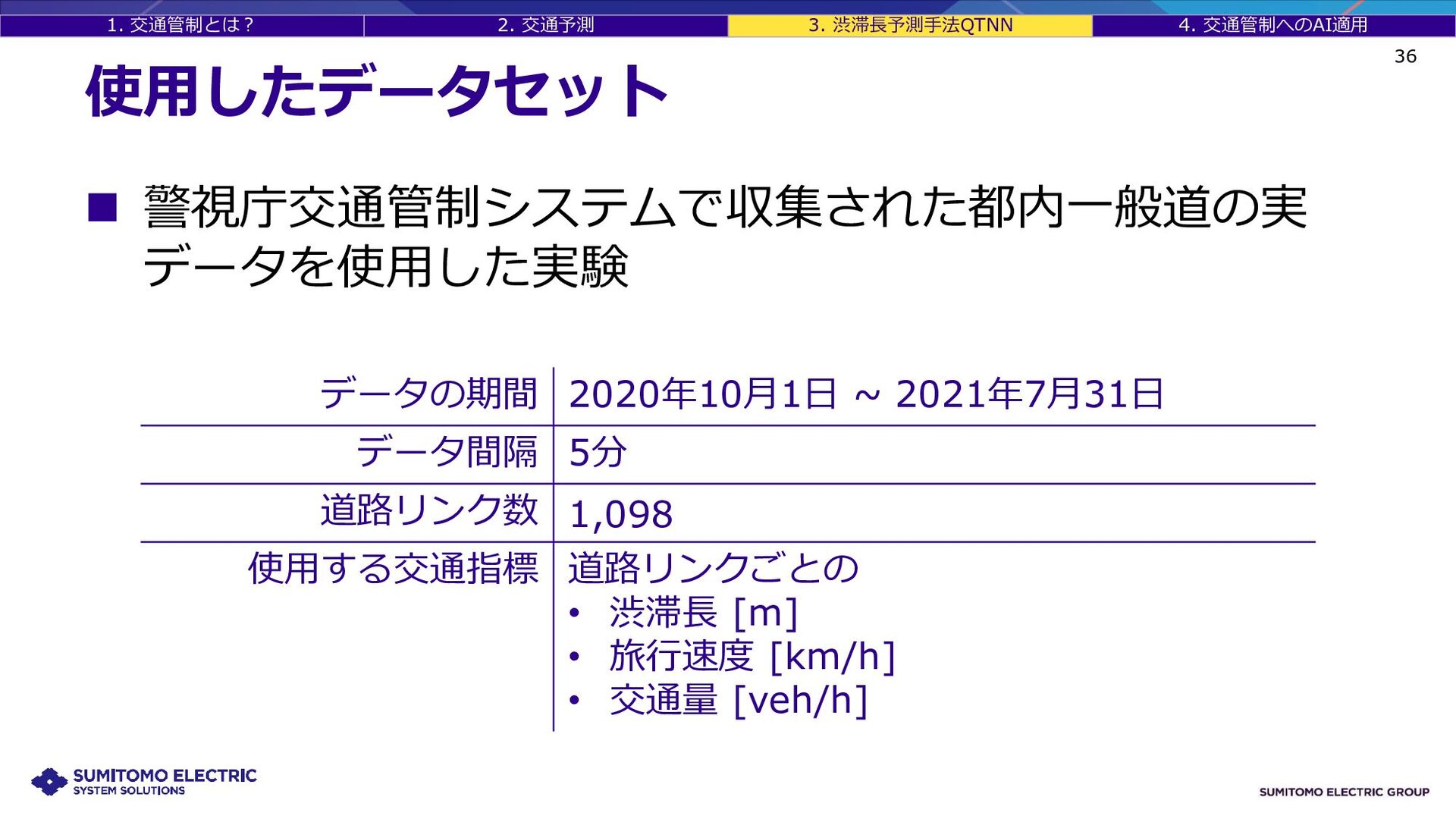
36 1. 交通管制とは? 2. 交通予測 4. 交通管制へのAI適用 3. 渋滞長予測手法QTNN 使用したデータセット
警視庁交通管制システムで収集された都内一般道の実 データを使用した実験 データの期間 2020年10月1日 ~ 2021年7月31日 データ間隔 5分 道路リンク数 1,098 使用する交通指標 道路リンクごとの • 渋滞長 [m] • 旅行速度 [km/h] • 交通量 [veh/h]
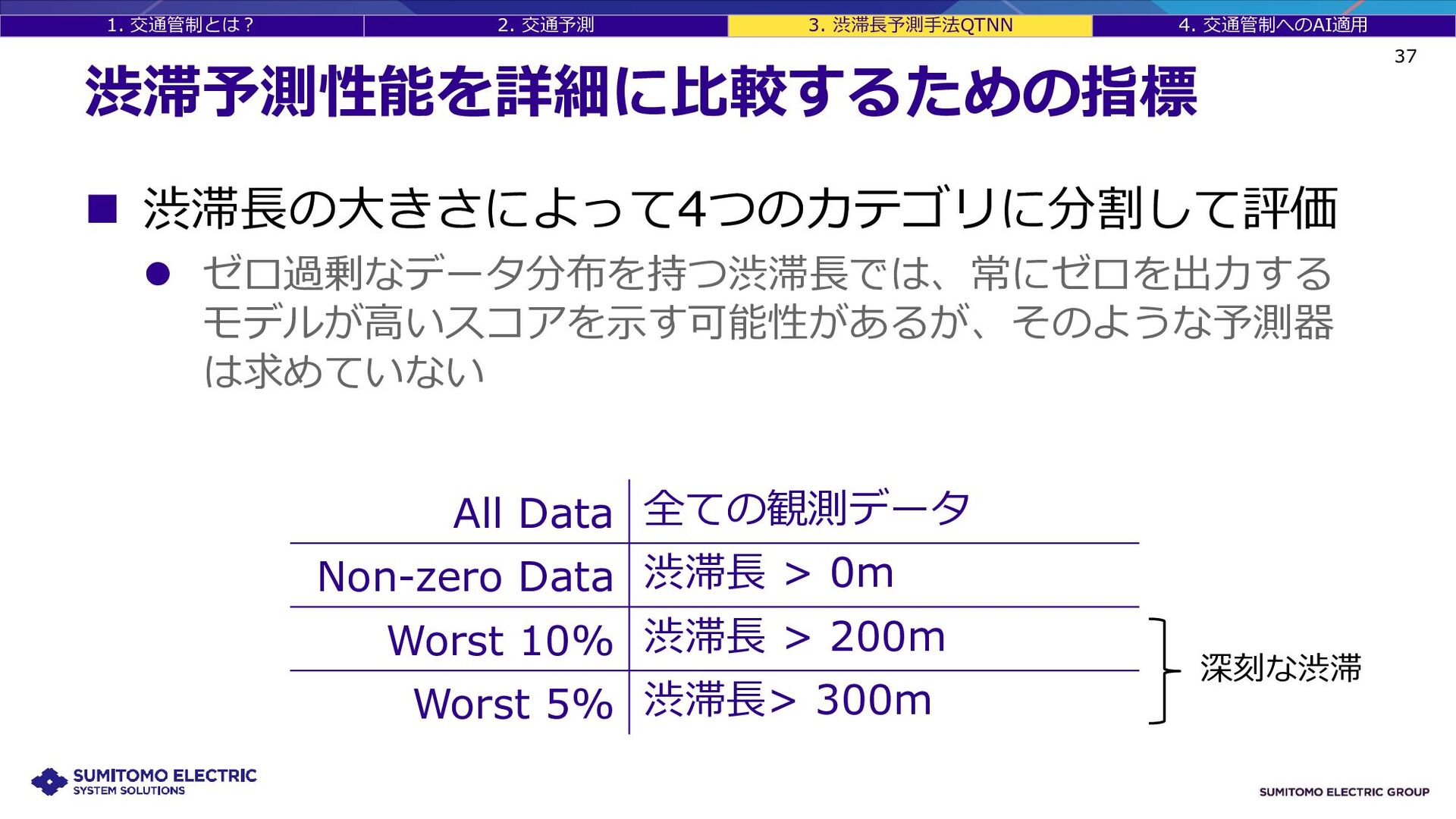
37 1. 交通管制とは? 2. 交通予測 4. 交通管制へのAI適用 3. 渋滞長予測手法QTNN 渋滞予測性能を詳細に比較するための指標
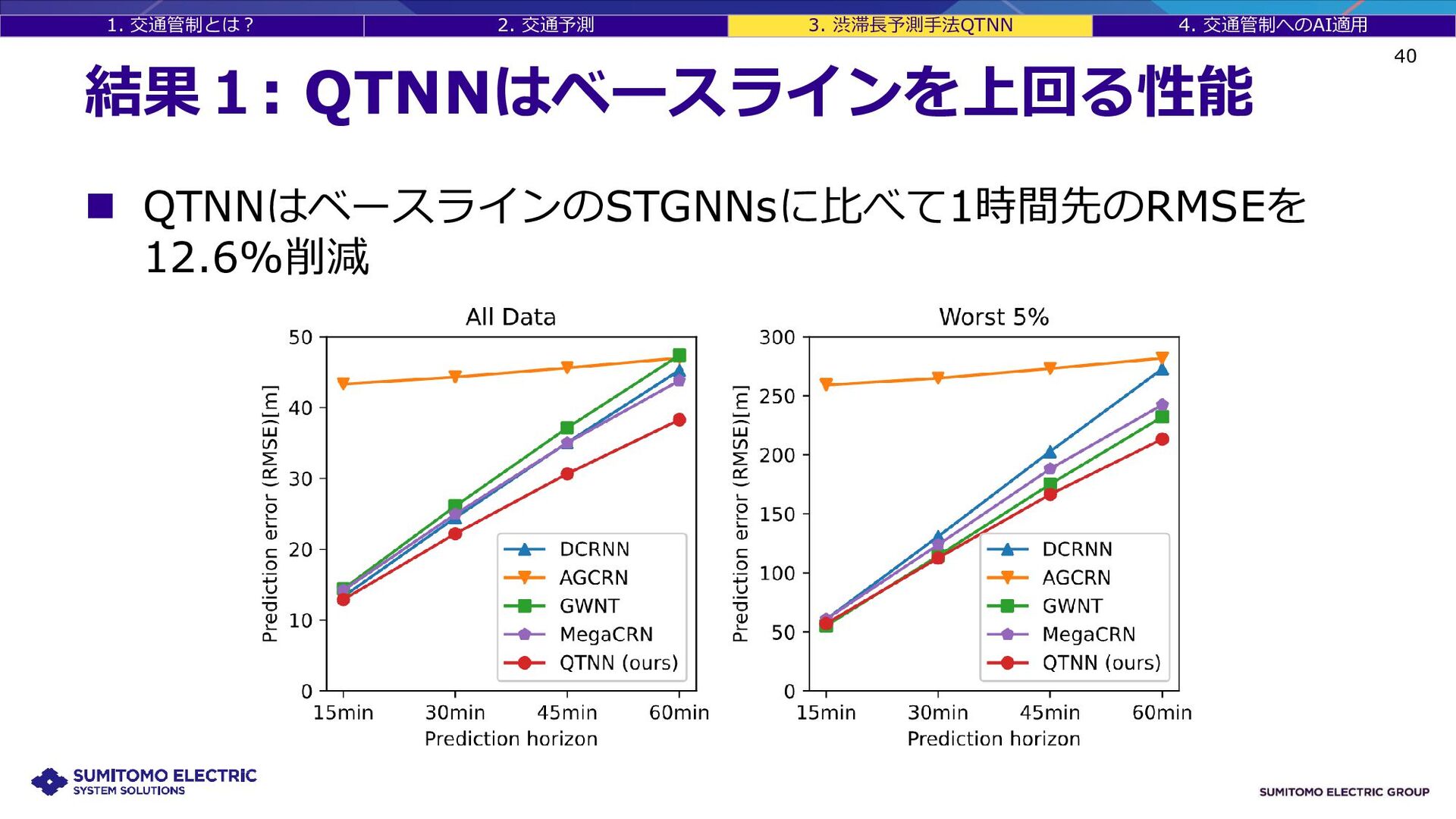
渋滞長の大きさによって4つのカテゴリに分割して評価 ゼロ過剰なデータ分布を持つ渋滞長では、常にゼロを出力する モデルが高いスコアを示す可能性があるが、そのような予測器 は求めていない All Data 全ての観測データ Non-zero Data 渋滞長 > 0m Worst 10% 渋滞長 > 200m Worst 5% 渋滞長> 300m 深刻な渋滞
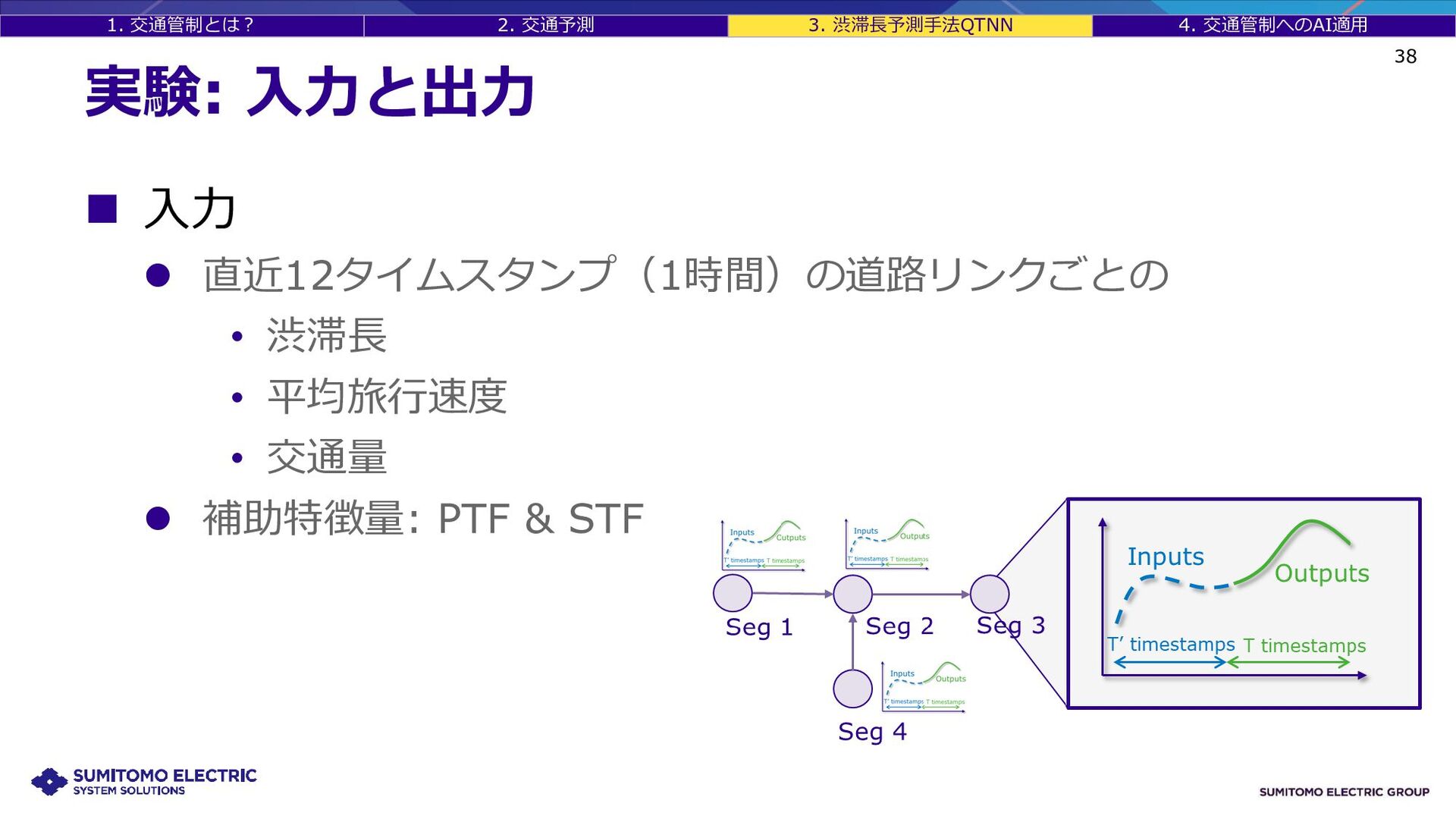
38 1. 交通管制とは? 2. 交通予測 4. 交通管制へのAI適用 3. 渋滞長予測手法QTNN 実験:
入力と出力 入力 直近12タイムスタンプ(1時間)の道路リンクごとの • 渋滞長 • 平均旅行速度 • 交通量 補助特徴量: PTF & STF
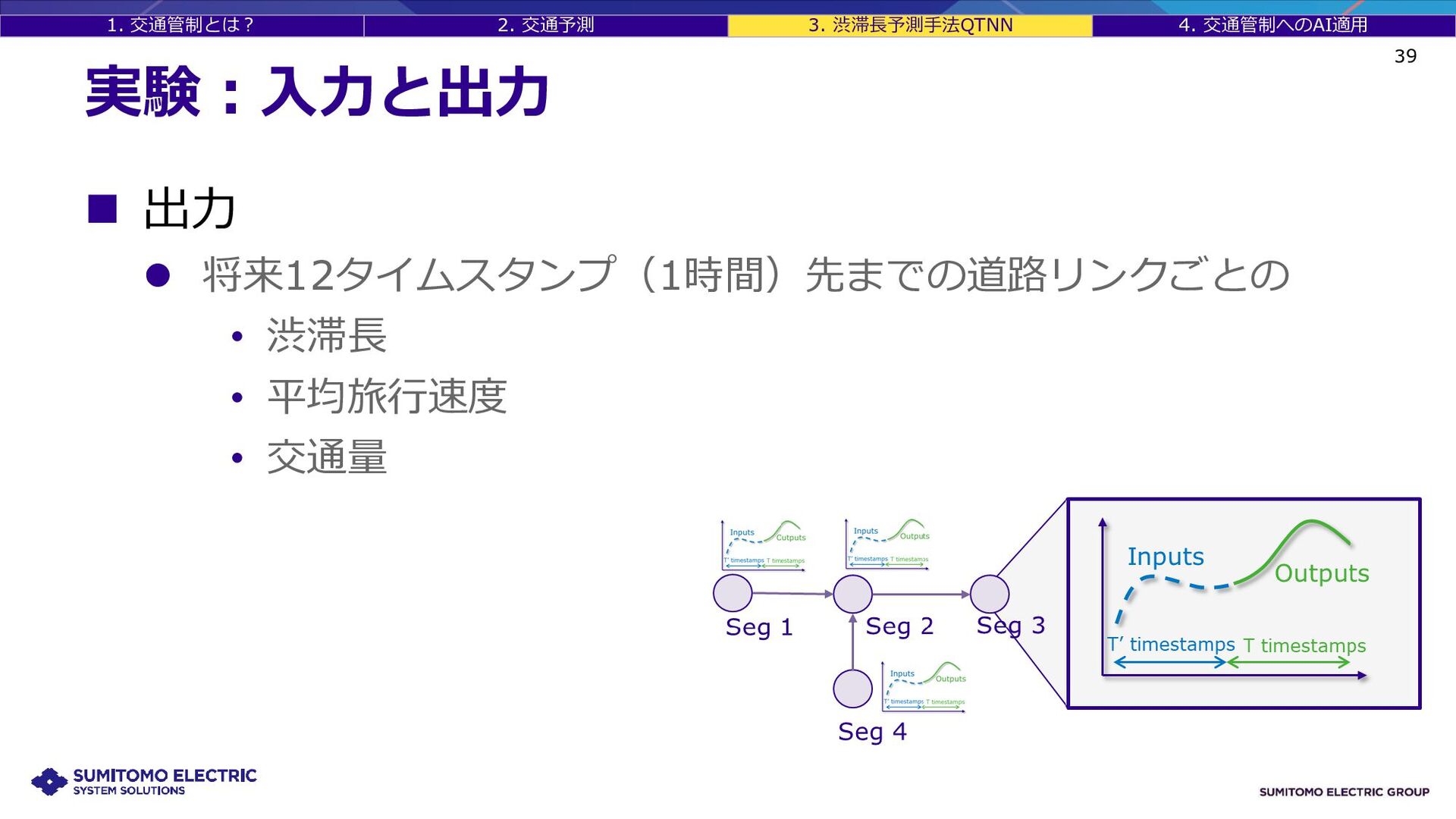
39 1. 交通管制とは? 2. 交通予測 4. 交通管制へのAI適用 3. 渋滞長予測手法QTNN 実験:入力と出力
出力 将来12タイムスタンプ(1時間)先までの道路リンクごとの • 渋滞長 • 平均旅行速度 • 交通量
40 1. 交通管制とは? 2. 交通予測 4. 交通管制へのAI適用 3. 渋滞長予測手法QTNN 結果1:
QTNNはベースラインを上回る性能 QTNNはベースラインのSTGNNsに比べて1時間先のRMSEを 12.6%削減
41 1. 交通管制とは? 2. 交通予測 4. 交通管制へのAI適用 3. 渋滞長予測手法QTNN 結果2:QTNNは予測結果を説明できる
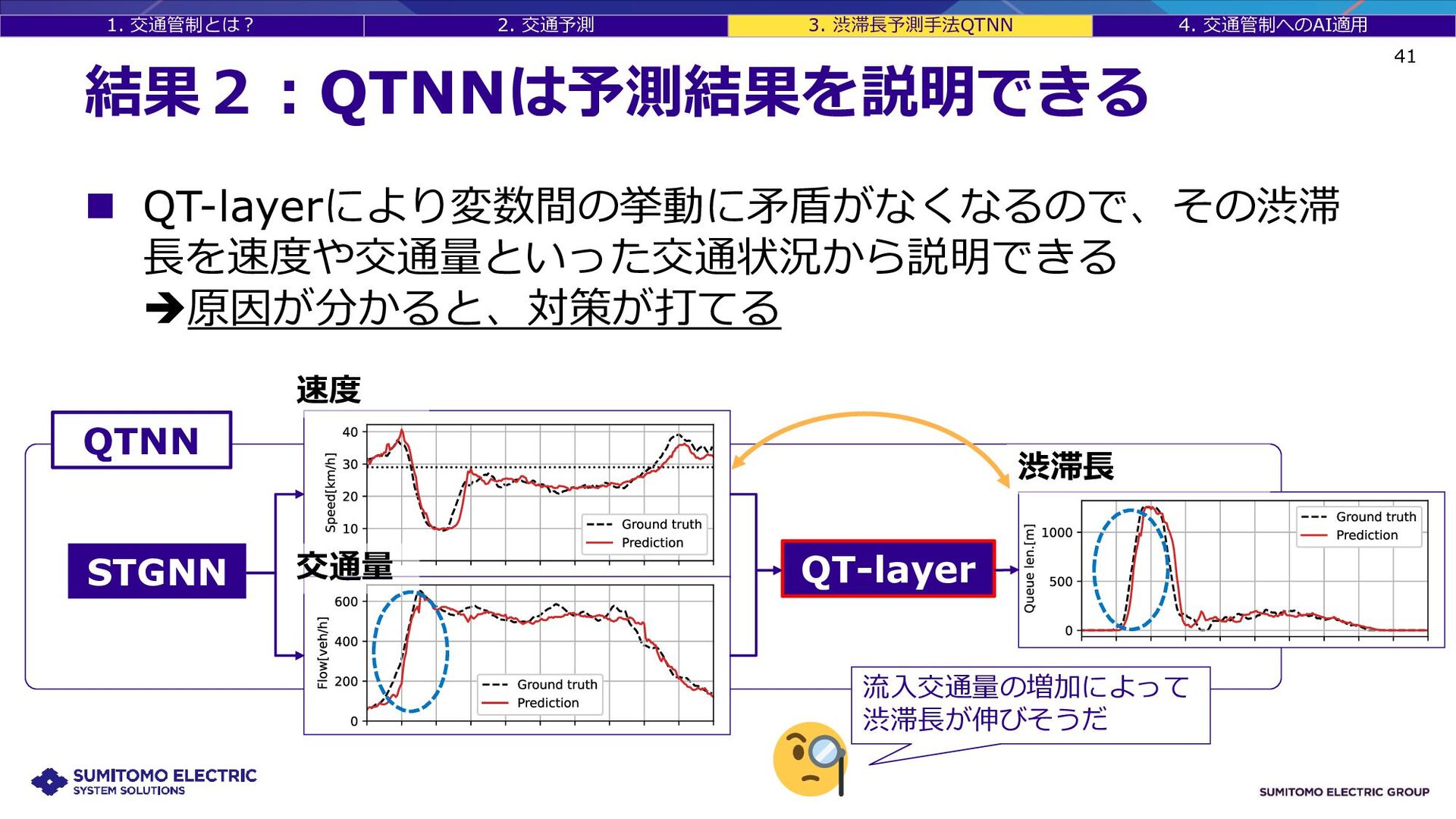
QT-layerにより変数間の挙動に矛盾がなくなるので、その渋滞 長を速度や交通量といった交通状況から説明できる 原因が分かると、対策が打てる 交通量 渋滞長 QT-layer STGNN QTNN 速度 流入交通量の増加によって 渋滞長が伸びそうだ
42 1. 交通管制とは? 2. 交通予測 4. 交通管制へのAI適用 3. 渋滞長予測手法QTNN 結果3:QT-layerは性能向上にも寄与
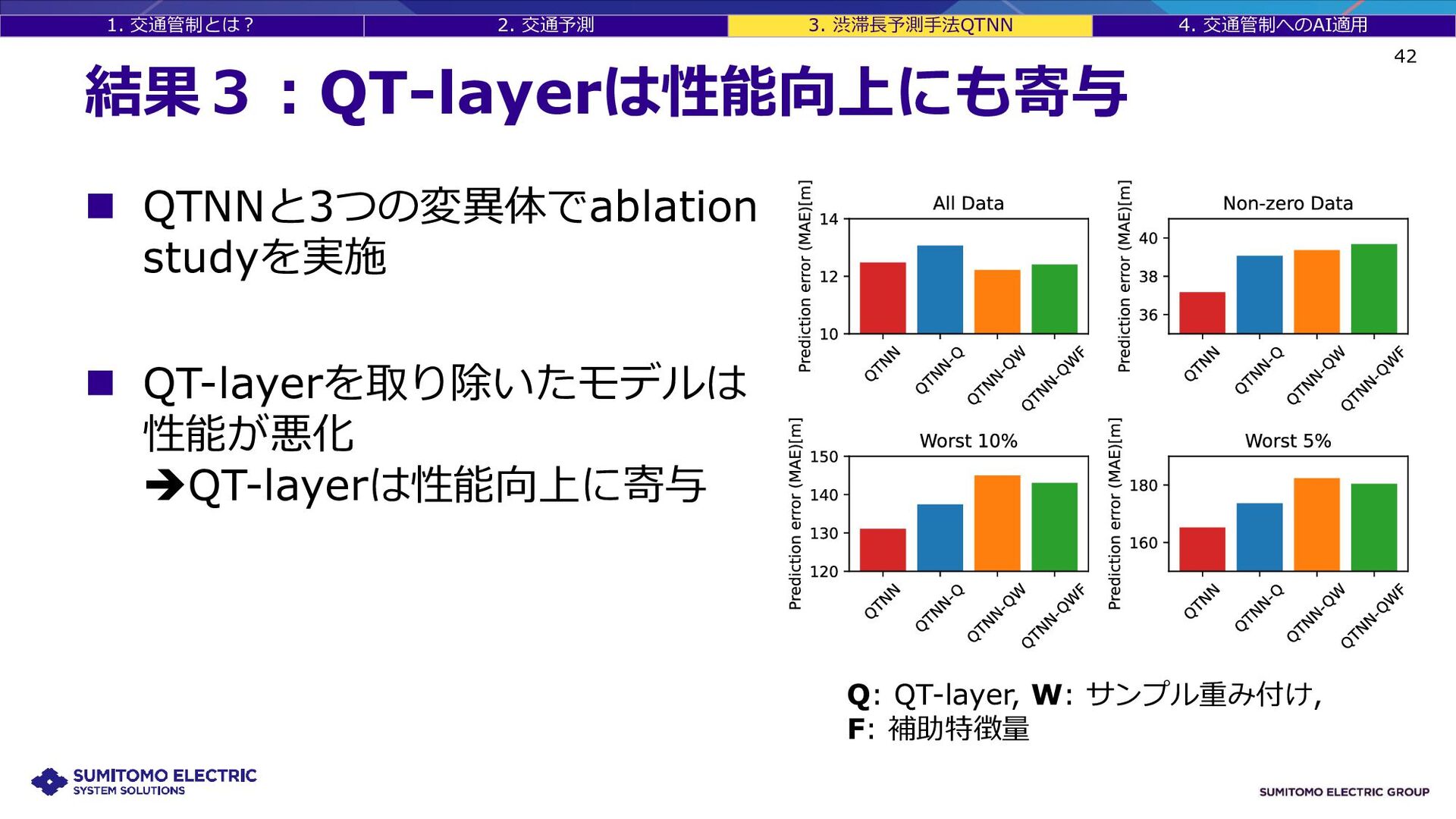
QTNNと3つの変異体でablation studyを実施 QT-layerを取り除いたモデルは 性能が悪化 QT-layerは性能向上に寄与 Q: QT-layer, W: サンプル重み付け, F: 補助特徴量
43 1. 交通管制とは? 2. 交通予測 4. 交通管制へのAI適用 3. 渋滞長予測手法QTNN まとめ
1. 渋滞長予測のためのモデルQTNN(Queueing-Theory-based Neural Network)を提案 2. 交通理論に基づく式と深層学習を組み合わせるためにPhysics- informedな層であるQT-layerを構築 3. QTNNは既存手法に比べて予測精度を12.6%改善した 4. QTNNの出力する渋滞予測結果はその時に予想される交通状況(速 度や交通量)から説明可能
4. 交通管制に求められるAI • 交通予測以外のタスク • 交通管制でもとめられていること
45 1. 交通管制とは? 2. 交通予測 4. 交通管制へのAI適用 3. 渋滞長予測手法QTNN 交通管制の3つの機能
車両感知器 光ビーコン 交通管制センター 環七通り 若林から 渋滞2km 信号制御 情報提供 情報提供 情報収集 情報収集 情報提供 情報収集 警視庁ホームページより
46 1. 交通管制とは? 2. 交通予測 4. 交通管制へのAI適用 3. 渋滞長予測手法QTNN 交通管制の3つの機能
車両感知器 光ビーコン 交通管制センター 環七通り 若林から 渋滞2km 信号制御 情報提供 情報提供 情報収集 情報収集 情報提供 情報収集 警視庁ホームページより 渋滞長を 予測 信 号 制 御 交通管制セ ン タ ー カ ーナビ ・ 地図アプリ 経 路 誘 導
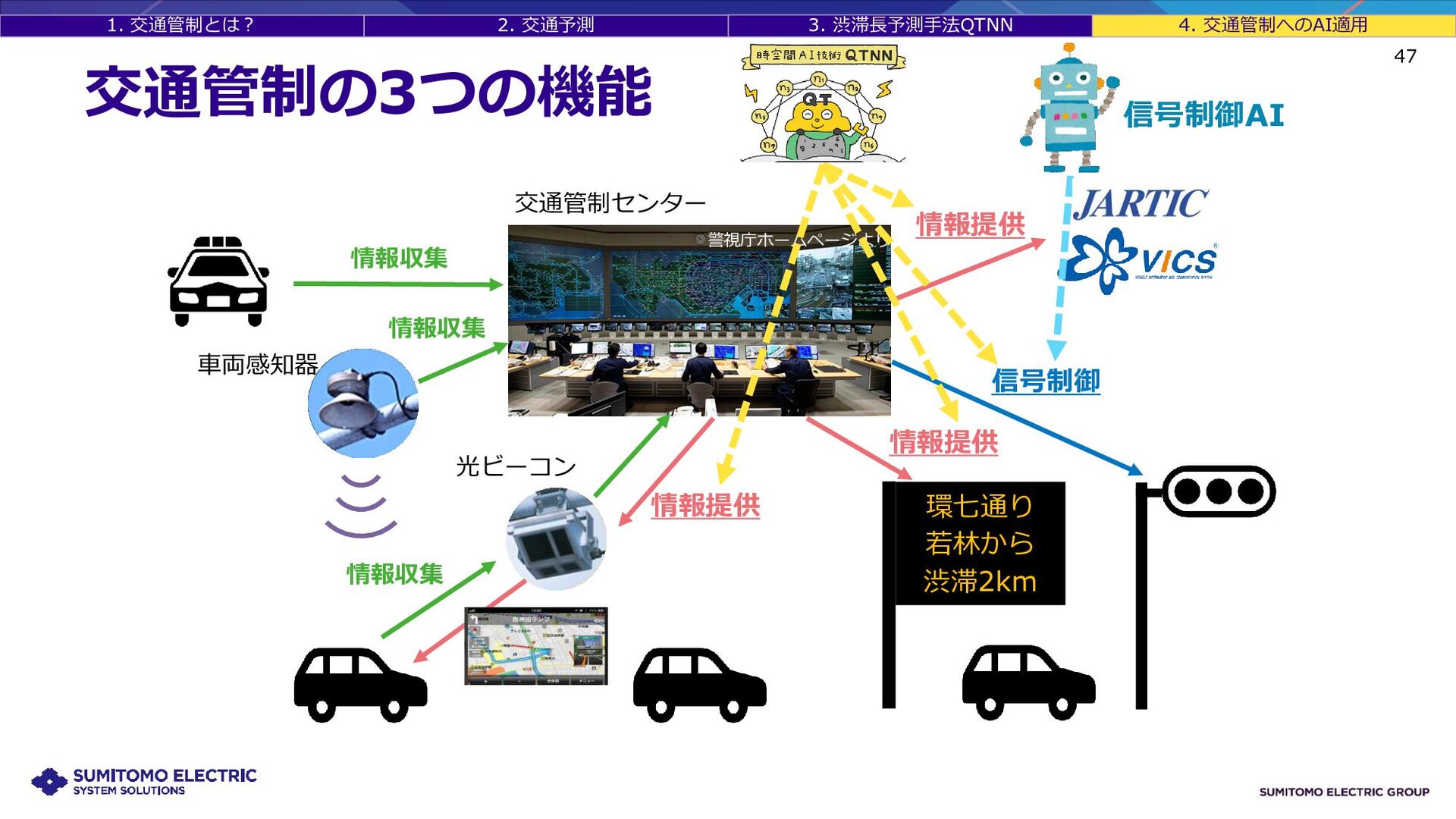
47 1. 交通管制とは? 2. 交通予測 4. 交通管制へのAI適用 3. 渋滞長予測手法QTNN 交通管制の3つの機能
車両感知器 光ビーコン 交通管制センター 環七通り 若林から 渋滞2km 信号制御 情報提供 情報提供 情報収集 情報収集 情報提供 情報収集 警視庁ホームページより 信号制御AI 渋滞長を 予測 信 号 制 御 交通管制セ ン タ ー カ ーナビ ・ 地図アプリ 経 路 誘 導
48 1. 交通管制とは? 2. 交通予測 4. 交通管制へのAI適用 3. 渋滞長予測手法QTNN 信号制御AI
強化学習を用いて信号制御を行う研究が多く発表されている Mohammad Noaseen, et al., Reinforcement learning in urban network traffic signal control: A systematic literature review. Expert Systems with Applications 19, 116830 (2022).
49 1. 交通管制とは? 2. 交通予測 4. 交通管制へのAI適用 3. 渋滞長予測手法QTNN 信号制御AIは社会実装されるか?
信頼性・安全性の問題 AIの出力は100%正確ではない。 • 不安全・不適切な制御が行われたら? リスクの見積り、フェールセーフの仕組み
50 1. 交通管制とは? 2. 交通予測 4. 交通管制へのAI適用 3. 渋滞長予測手法QTNN 信号制御AIは社会実装されるか?
信頼性・安全性の問題 AIの出力は100%正確ではない。 • 不安全・不適切な制御が行われたら? 機械による意思決定は今も同じ。ならば代替可能なはずだが… 結局、制御を評価する明確な基準が存在しないことが問題 • 評価指標・評価方法 • 禁忌選択 産官学が協調して議論するべき問題 リスクの見積り、フェールセーフの仕組み
51 まとめ 交通管制の意義と目的の紹介 安全で快適な交通を実現するための機能の一つである交通管制システム。情報収集・情報分 析・信号制御という3つの機能を持つ。 交通予測タスクの現状の概観
データ駆動型の深層学習、特にSTGNNが高性能をマーク。しかし渋滞長を含むデータセッ トは存在せず、既存研究が特徴的な渋滞長データにうまく適合できるかは不明。 QTNNの詳細の紹介 交通理論と深層学習を組み合わせたQTNNを提案。QTNNは高い予測性能と解釈可能性を併 せ持つことから、交通管制システムへの応用に適している。 交通管制に活用するAIに求められること 交通予測に加えて信号制御タスクも研究対象。しかし、社会実装のためには既存アルゴリズ ムと比較するための明確な基準とリスク評価が欠かせない。現状はまだAI適用に向けた環境 が整っていないように見える。
52 ご清聴ありがとうございました! ご質問などはこちらへどうぞ: E-mail:
[email protected]
資料を公開しています:
KDDの論文(QTNet):https://dl.acm.org/doi/abs/10.1145/3580305.3599890 KDDの資料:https://speakerdeck.com/rshirakami/qtnet-kdd2023 本日の資料: https://speakerdeck.com/rshirakami/riken-workshop-20231115 渋滞長を 予測
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![34 1. 交通管制とは? 2. 交通予測 4. 交通管制へのAI適用 3. 渋滞長予測手法QTNN [再掲]](https://files.speakerdeck.com/presentations/9959c9aa6529409692da939b4d833bdf/slide_32.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![52 ご清聴ありがとうございました! ご質問などはこちらへどうぞ: E-mail: [email protected] 資料を公開しています: ](https://files.speakerdeck.com/presentations/9959c9aa6529409692da939b4d833bdf/slide_50.jpg){kind=link}