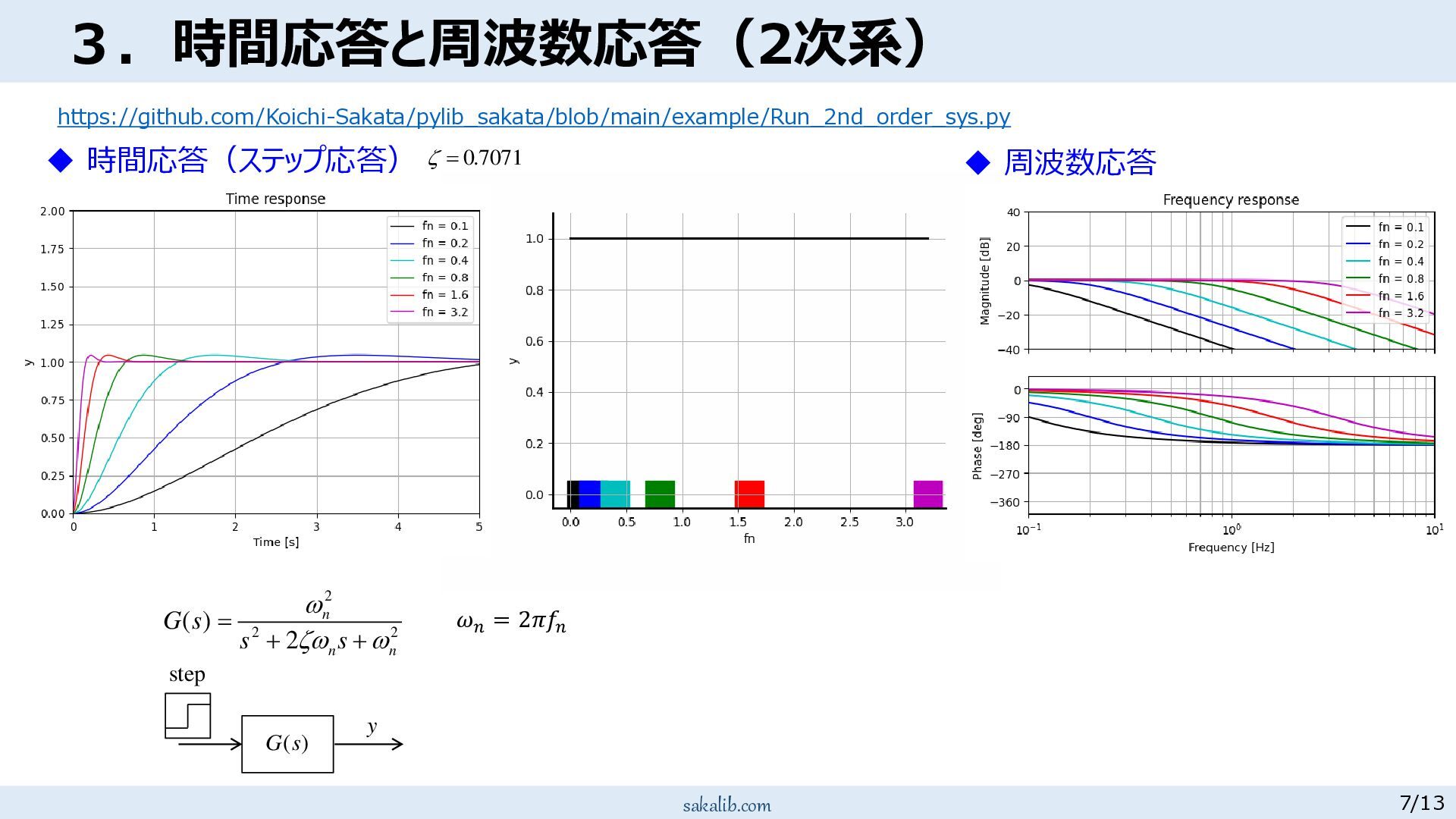
1 2 1 2 2 n P P M − = − = 倍 7071 . 0 2 1 when = 2 2 2 2 ) ( n n n s s s G + + = ) (s G y step ピークゲイン: ピーク周波数: ◆ 時間応答(ステップ応答) 1 2 = n https://github.com/Koichi-Sakata/pylib_sakata/blob/main/example/Run_2nd_order_sys.py ◆ 周波数応答
n n s s s G + + = ) (s G y step 7071 . 0 = 𝜔𝑛 = 2𝜋𝑓𝑛 ◆ 時間応答(ステップ応答) ◆ 周波数応答 https://github.com/Koichi-Sakata/pylib_sakata/blob/main/example/Run_2nd_order_sys.py
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![sakalib.com 6/13 3.時間応答と周波数応答(2次系) ] rad/s [ 2 1 ] [](https://files.speakerdeck.com/presentations/12f45ab435a146f591105bd1213cc831/slide_6.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}